Спосіб керування безконтактним двигуном
Номер патенту: 98265
Опубліковано: 25.04.2012
Автори: Баранніков Олександр Володимирович, Акинін Костянтин Павлович

Формула / Реферат
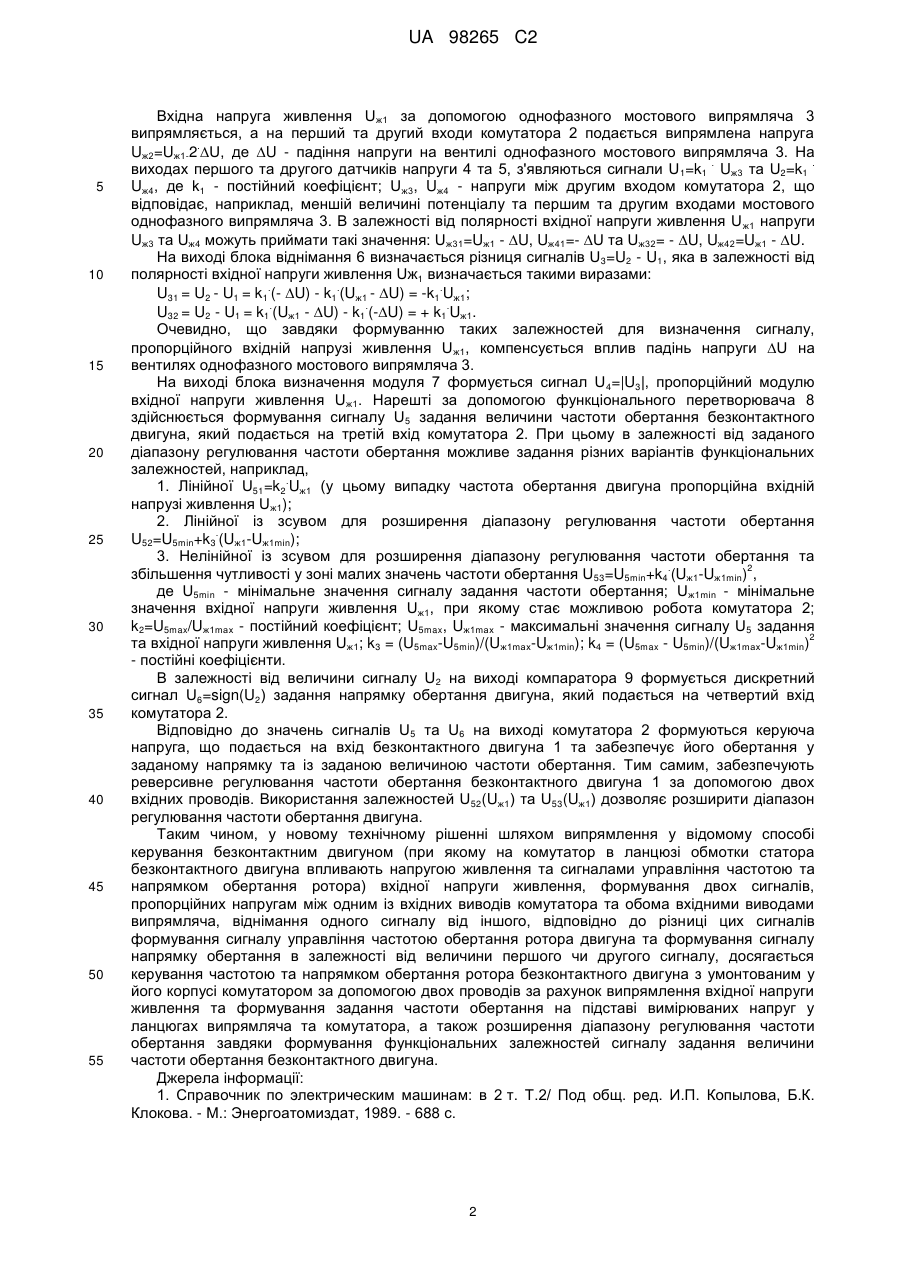
Спосіб керування безконтактним двигуном, при якому на комутатор в ланцюзі обмотки статора безконтактного двигуна впливають напругою живлення та сигналами управління частотою та напрямком обертання ротора, який відрізняється тим, що вхідну напругу живлення попередньо випрямляють, формують перший та другий сигнали, пропорційні першій та другій напругам між одним із вхідних виводів живлення комутатора та відповідно з першим та другим входами випрямляча, віднімають один із сигналів від іншого, відповідно до різниці цих сигналів формують сигнал управління частотою обертання ротора двигуна, в залежності від величини першого чи другого сигналу формують сигнал напрямку обертання.
Текст
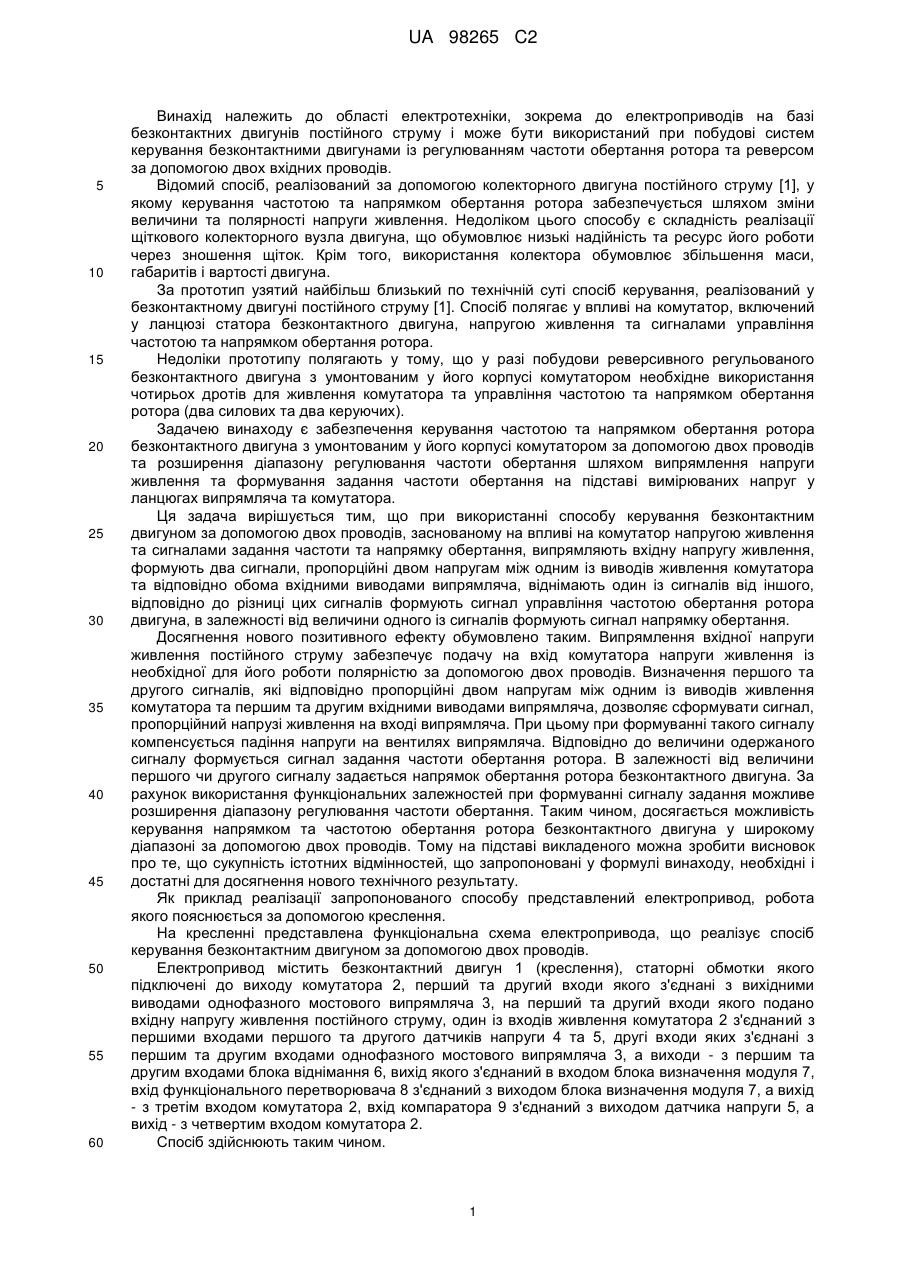
Реферат: Запропоновано спосіб керування безконтактним двигуном з умонтованим у його корпусі комутатором. Суть способу полягає у наступному. Вхідна напруга живлення постійного струму випрямляється. Далі формують два сигнали, пропорційні першій та другій напругам між одним із вхідних виводів живлення комутатора та відповідно з першим та другим входами випрямляча. Віднімають один із сигналів від іншого, відповідно до різниці цих сигналів формують сигнал управління частотою обертання ротора двигуна. В залежності від величини першого чи другого сигналу формують сигнал напрямку обертання. UA 98265 C2 (12) UA 98265 C2 UA 98265 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області електротехніки, зокрема до електроприводів на базі безконтактних двигунів постійного струму і може бути використаний при побудові систем керування безконтактними двигунами із регулюванням частоти обертання ротора та реверсом за допомогою двох вхідних проводів. Відомий спосіб, реалізований за допомогою колекторного двигуна постійного струму [1], у якому керування частотою та напрямком обертання ротора забезпечується шляхом зміни величини та полярності напруги живлення. Недоліком цього способу є складність реалізації щіткового колекторного вузла двигуна, що обумовлює низькі надійність та ресурс його роботи через зношення щіток. Крім того, використання колектора обумовлює збільшення маси, габаритів і вартості двигуна. За прототип узятий найбільш близький по технічній суті спосіб керування, реалізований у безконтактному двигуні постійного струму [1]. Спосіб полягає у впливі на комутатор, включений у ланцюзі статора безконтактного двигуна, напругою живлення та сигналами управління частотою та напрямком обертання ротора. Недоліки прототипу полягають у тому, що у разі побудови реверсивного регульованого безконтактного двигуна з умонтованим у його корпусі комутатором необхідне використання чотирьох дротів для живлення комутатора та управління частотою та напрямком обертання ротора (два силових та два керуючих). Задачею винаходу є забезпечення керування частотою та напрямком обертання ротора безконтактного двигуна з умонтованим у його корпусі комутатором за допомогою двох проводів та розширення діапазону регулювання частоти обертання шляхом випрямлення напруги живлення та формування задання частоти обертання на підставі вимірюваних напруг у ланцюгах випрямляча та комутатора. Ця задача вирішується тим, що при використанні способу керування безконтактним двигуном за допомогою двох проводів, заснованому на впливі на комутатор напругою живлення та сигналами задання частоти та напрямку обертання, випрямляють вхідну напругу живлення, формують два сигнали, пропорційні двом напругам між одним із виводів живлення комутатора та відповідно обома вхідними виводами випрямляча, віднімають один із сигналів від іншого, відповідно до різниці цих сигналів формують сигнал управління частотою обертання ротора двигуна, в залежності від величини одного із сигналів формують сигнал напрямку обертання. Досягнення нового позитивного ефекту обумовлено таким. Випрямлення вхідної напруги живлення постійного струму забезпечує подачу на вхід комутатора напруги живлення із необхідної для його роботи полярністю за допомогою двох проводів. Визначення першого та другого сигналів, які відповідно пропорційні двом напругам між одним із виводів живлення комутатора та першим та другим вхідними виводами випрямляча, дозволяє сформувати сигнал, пропорційний напрузі живлення на вході випрямляча. При цьому при формуванні такого сигналу компенсується падіння напруги на вентилях випрямляча. Відповідно до величини одержаного сигналу формується сигнал задання частоти обертання ротора. В залежності від величини першого чи другого сигналу задається напрямок обертання ротора безконтактного двигуна. За рахунок використання функціональних залежностей при формуванні сигналу задання можливе розширення діапазону регулювання частоти обертання. Таким чином, досягається можливість керування напрямком та частотою обертання ротора безконтактного двигуна у широкому діапазоні за допомогою двох проводів. Тому на підставі викладеного можна зробити висновок про те, що сукупність істотних відмінностей, що запропоновані у формулі винаходу, необхідні і достатні для досягнення нового технічного результату. Як приклад реалізації запропонованого способу представлений електропривод, робота якого пояснюється за допомогою креслення. На кресленні представлена функціональна схема електропривода, що реалізує спосіб керування безконтактним двигуном за допомогою двох проводів. Електропривод містить безконтактний двигун 1 (креслення), статорні обмотки якого підключені до виходу комутатора 2, перший та другий входи якого з'єднані з вихідними виводами однофазного мостового випрямляча 3, на перший та другий входи якого подано вхідну напругу живлення постійного струму, один із входів живлення комутатора 2 з'єднаний з першими входами першого та другого датчиків напруги 4 та 5, другі входи яких з'єднані з першим та другим входами однофазного мостового випрямляча 3, а виходи - з першим та другим входами блока віднімання 6, вихід якого з'єднаний в входом блока визначення модуля 7, вхід функціонального перетворювача 8 з'єднаний з виходом блока визначення модуля 7, а вихід - з третім входом комутатора 2, вхід компаратора 9 з'єднаний з виходом датчика напруги 5, а вихід - з четвертим входом комутатора 2. Спосіб здійснюють таким чином. 1 UA 98265 C2 5 10 15 20 25 30 35 40 45 50 55 Вхідна напруга живлення Uж1 за допомогою однофазного мостового випрямляча 3 випрямляється, а на перший та другий входи комутатора 2 подається випрямлена напруга . Uж2=Uж1-2 U, де U - падіння напруги на вентилі однофазного мостового випрямляча 3. На . . виходах першого та другого датчиків напруги 4 та 5, з'являються сигнали U 1=k1 Uж3 та U2=k1 Uж4, де k1 - постійний коефіцієнт; Uж3, Uж4 - напруги між другим входом комутатора 2, що відповідає, наприклад, меншій величині потенціалу та першим та другим входами мостового однофазного випрямляча 3. В залежності від полярності вхідної напруги живлення U ж1 напруги Uж3 та Uж4 можуть приймати такі значення: Uж31=Uж1 - U, Uж41=- U та Uж32= - U, Uж42=Uж1 - U. На виході блока віднімання 6 визначається різниця сигналів U3=U2 - U1, яка в залежності від полярності вхідної напруги живлення Uж1 визначається такими виразами: . . . U31 = U2 - U1 = k1 (- U) - k1 (Uж1 - U) = -k1 Uж1; . . . U32 = U2 - U1 = k1 (Uж1 - U) - k1 (-U) = + k1 Uж1. Очевидно, що завдяки формуванню таких залежностей для визначення сигналу, пропорційного вхідній напрузі живлення U ж1, компенсується вплив падінь напруги U на вентилях однофазного мостового випрямляча 3. На виході блока визначення модуля 7 формується сигнал U 4=|U3|, пропорційний модулю вхідної напруги живлення Uж1. Нарешті за допомогою функціонального перетворювача 8 здійснюється формування сигналу U5 задання величини частоти обертання безконтактного двигуна, який подається на третій вхід комутатора 2. При цьому в залежності від заданого діапазону регулювання частоти обертання можливе задання різних варіантів функціональних залежностей, наприклад, . 1. Лінійної U51=k2 Uж1 (у цьому випадку частота обертання двигуна пропорційна вхідній напрузі живлення Uж1); 2. Лінійної із зсувом для розширення діапазону регулювання частоти обертання . U52=U5min+k3 (Uж1-Uж1mіn); 3. Нелінійної із зсувом для розширення діапазону регулювання частоти обертання та . 2 збільшення чутливості у зоні малих значень частоти обертання U53=U5min+k4 (Uж1-Uж1mіn) , де U5min - мінімальне значення сигналу задання частоти обертання; U ж1mіn - мінімальне значення вхідної напруги живлення Uж1, при якому стає можливою робота комутатора 2; k2=U5max/Uж1mаx - постійний коефіцієнт; U5max, Uж1mах - максимальні значення сигналу U5 задання 2 та вхідної напруги живлення Uж1; k3 = (U5max-U5min)/(Uж1max-Uж1min); k4 = (U5max - U5min)/(Uж1max-Uж1min) - постійні коефіцієнти. В залежності від величини сигналу U2 на виході компаратора 9 формується дискретний сигнал U6=sign(U2) задання напрямку обертання двигуна, який подається на четвертий вхід комутатора 2. Відповідно до значень сигналів U5 та U6 на виході комутатора 2 формуються керуюча напруга, що подається на вхід безконтактного двигуна 1 та забезпечує його обертання у заданому напрямку та із заданою величиною частоти обертання. Тим самим, забезпечують реверсивне регулювання частоти обертання безконтактного двигуна 1 за допомогою двох вхідних проводів. Використання залежностей U52(Uж1) та U53(Uж1) дозволяє розширити діапазон регулювання частоти обертання двигуна. Таким чином, у новому технічному рішенні шляхом випрямлення у відомому способі керування безконтактним двигуном (при якому на комутатор в ланцюзі обмотки статора безконтактного двигуна впливають напругою живлення та сигналами управління частотою та напрямком обертання ротора) вхідної напруги живлення, формування двох сигналів, пропорційних напругам між одним із вхідних виводів комутатора та обома вхідними виводами випрямляча, віднімання одного сигналу від іншого, відповідно до різниці цих сигналів формування сигналу управління частотою обертання ротора двигуна та формування сигналу напрямку обертання в залежності від величини першого чи другого сигналу, досягається керування частотою та напрямком обертання ротора безконтактного двигуна з умонтованим у його корпусі комутатором за допомогою двох проводів за рахунок випрямлення вхідної напруги живлення та формування задання частоти обертання на підставі вимірюваних напруг у ланцюгах випрямляча та комутатора, а також розширення діапазону регулювання частоти обертання завдяки формування функціональних залежностей сигналу задання величини частоти обертання безконтактного двигуна. Джерела інформації: 1. Справочник по электрическим машинам: в 2 т. Т.2/ Под общ. ред. И.П. Копылова, Б.К. Клокова. - М.: Энергоатомиздат, 1989. - 688 с. 2 UA 98265 C2 ФОРМУЛА ВИНАХОДУ 5 10 Спосіб керування безконтактним двигуном, при якому на комутатор в ланцюзі обмотки статора безконтактного двигуна впливають напругою живлення та сигналами управління частотою та напрямком обертання ротора, який відрізняється тим, що вхідну напругу живлення попередньо випрямляють, формують перший та другий сигнали, пропорційні першій та другій напругам між одним із вхідних виводів живлення комутатора та відповідно з першим та другим входами випрямляча, віднімають один із сигналів від іншого, відповідно до різниці цих сигналів формують сигнал управління частотою обертання ротора двигуна, в залежності від величини першого чи другого сигналу формують сигнал напрямку обертання. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of contactless motor
Автори англійськоюAnikin Kostiantyn Pavlovych, Barannikov Oleksandr Volodymyrovych
Назва патенту російськоюСпособ управления бесконтактным двигателем
Автори російськоюАкинин Константин Павлович, Баранников Александр Владимирович
МПК / Мітки
МПК: H02K 29/00, H02P 6/00
Мітки: двигуном, керування, спосіб, безконтактним
Код посилання
<a href="https://ua.patents.su/5-98265-sposib-keruvannya-bezkontaktnim-dvigunom.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування безконтактним двигуном</a>
Спосіб керування безконтактним двигуном з постійними магнітами

Номер патенту: 66449
Опубліковано: 10.01.2012
Автор: Акинін Костянтин Павлович
МПК: H02P 6/00
Мітки: керування, безконтактним, магнітами, спосіб, постійними, двигуном
Формула / Реферат:
Спосіб керування безконтактним двигуном з постійними магнітами, що включає формування по сигналах двох датчиків Холла сигналу зворотного зв'язку, порівняння його із сигналом задання і вплив на підсилювач потужності в ланцюзі обмотки статора двигуна, який відрізняється тим, що інвертують первинні сигнали двох датчиків Холла, із квазілінійних ділянок первинних та інвертованих сигналів формують кусково-лінійний сигнал, який порівнюють із...
Спосіб керування безконтактним магнітоелектричним двигуном
Номер патенту: 89845
Опубліковано: 10.03.2010
Автори: Антонов Олександр Євгенович, Кіреєв Володимир Георгійович, Акинін Костянтин Павлович
МПК: H02P 6/00
Мітки: керування, двигуном, спосіб, безконтактним, магнітоелектричним
Формула / Реферат:
Спосіб керування безконтактним магнітоелектричним двигуном, при якому по сигналах двох датчиків Холла формують сигнал зворотного зв'язку, порівнюють його із сигналом задання і впливають на підсилювач потужності в ланцюзі обмотки статора двигуна, який відрізняється тим, що амплітуди сигналів датчиків Холла, принаймні один із яких виконаний аналоговим, на кожному періоді приводять до єдиного нормованого рівня, порівнюють поточні значення...
Спосіб керування вентильним двигуном у синхронному режимі з використанням нечіткого регулятора
Номер патенту: 40910
Опубліковано: 27.04.2009
Автори: Гусев Олександр Олександрович, Іванець Сергій Анатолійович
МПК: H02P 6/00
Мітки: режимі, синхронному, керування, використанням, регулятора, спосіб, вентильним, двигуном, нечіткого
Формула / Реферат:
Спосіб керування вентильним двигуном у синхронному режимі з використанням нечіткого регулятора, який відрізняється тим, що використовують єдиний нечіткий регулятор як на етапі стабілізації швидкості, так і на етапі розгону двигуна з використанням частотного пуску.
Спосіб керування асинхронним двигуном при важкому рушанні та пристрій для його реалізації
Номер патенту: 84176
Опубліковано: 25.09.2008
Автори: Гладир Андрій Іванович, Ємець Валерій Васильович, Конох Ігор Сергійович, Хребтова Оксана Анатоліївна, Гомілко Володимир Іванович, Романенко Катерина Георгіївна
МПК: H02P 1/00
Мітки: асинхронним, керування, спосіб, двигуном, реалізації, важкому, рушанні, пристрій
Формула / Реферат:
1. Спосіб керування асинхронним двигуном при важкому рушанні, що полягає в підключенні асинхронного двигуна до трифазної мережі через перетворювач частоти, формуванні протягом часу t = tT електромагнітного моменту двигуна у функції часу з поступовим збільшенням до значення МП0, що дорівнює пусковому моменту двигуна, контролі процесу запуску впродовж часу t = tB шляхом обчислення ковзання s за миттєвими значеннями струму та напруги статора,...
Пристрій керування асинхронним вентильним двигуном
Номер патенту: 80161
Опубліковано: 27.08.2007
Автори: Епштейн Ісаак Ізраілевич, Кохан Павло Степанович, Хоменко Олександр Андрійович
МПК: H02P 29/00, H02K 29/00
Мітки: асинхронним, керування, пристрій, двигуном, вентильним
Формула / Реферат:
Пристрій керування асинхронним вентильним двигуном, підключений до трифазної живильної мережі, який має трифазний мережний вимикач, перші клеми якого з'єднані з відповідними фазами трифазної живильної мережі, асинхронний вентильний двигун, датчик швидкості обертання ротора, що з'єднаний з ротором асинхронного вентильного двигуна, задатчик швидкості обертання, блок керування, до третього і четвертого входів якого підключені виходи відповідно...