Система керування вітрорушієм
Номер патенту: 113519
Опубліковано: 25.01.2017
Автори: Сандлер Альберт Кирилович, Карпілов Олександр Юрійович

Формула / Реферат
Система керування вітрорушієм, що складається з вітрорушія, блока моніторингу положення сегментів вітрорушія, блока керування на основі мікроконтролерної техніки, блока азимутального контролю вітру, блока гіроскопів для контролю просторового положення судна, пульта дистанційного керування, блока керування силовими сервоприводами, локального пульта керування та блока виконавчих приводів, який відрізняється тим, що до складу системи введено блок контролю становища довколишнього середовища, блок контролю навантаження головної енергетичної установки, блок розподіленого контролю хвилевого навантаження на корпус судна, блок контролю осадки судна, до складу блока азимутального контролю вітру та блока моніторингу положення сегментів вітрорушія введені розподілені за довжиною щогли та сегментами вітрорушія датчики, блок гіроскопів просторового положення судна контролює також диферент судна, а блок моніторингу положення сегментів вітрорушія зв'язаний з блоком керування на основі мікроконтролерної техніки.
Текст
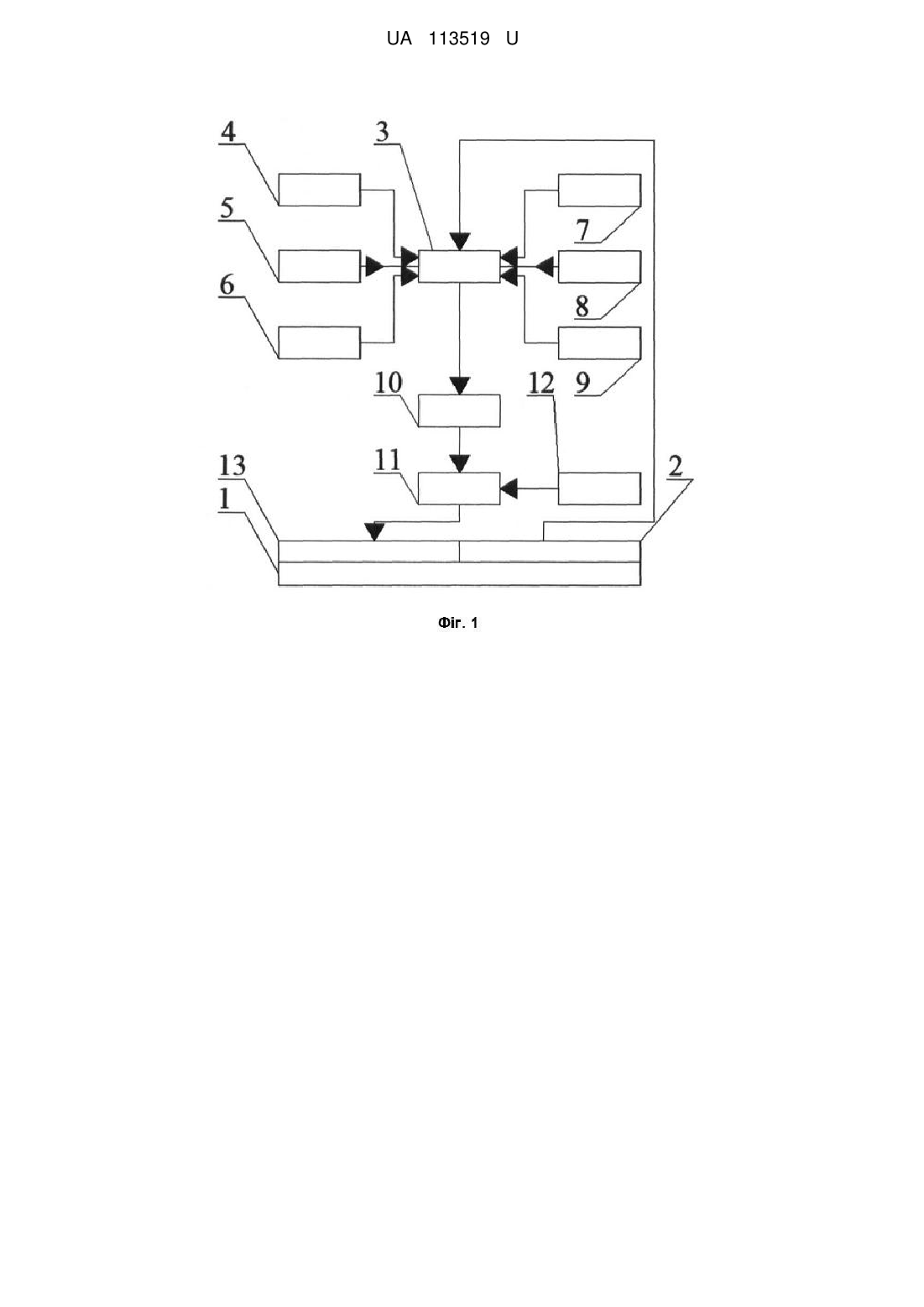
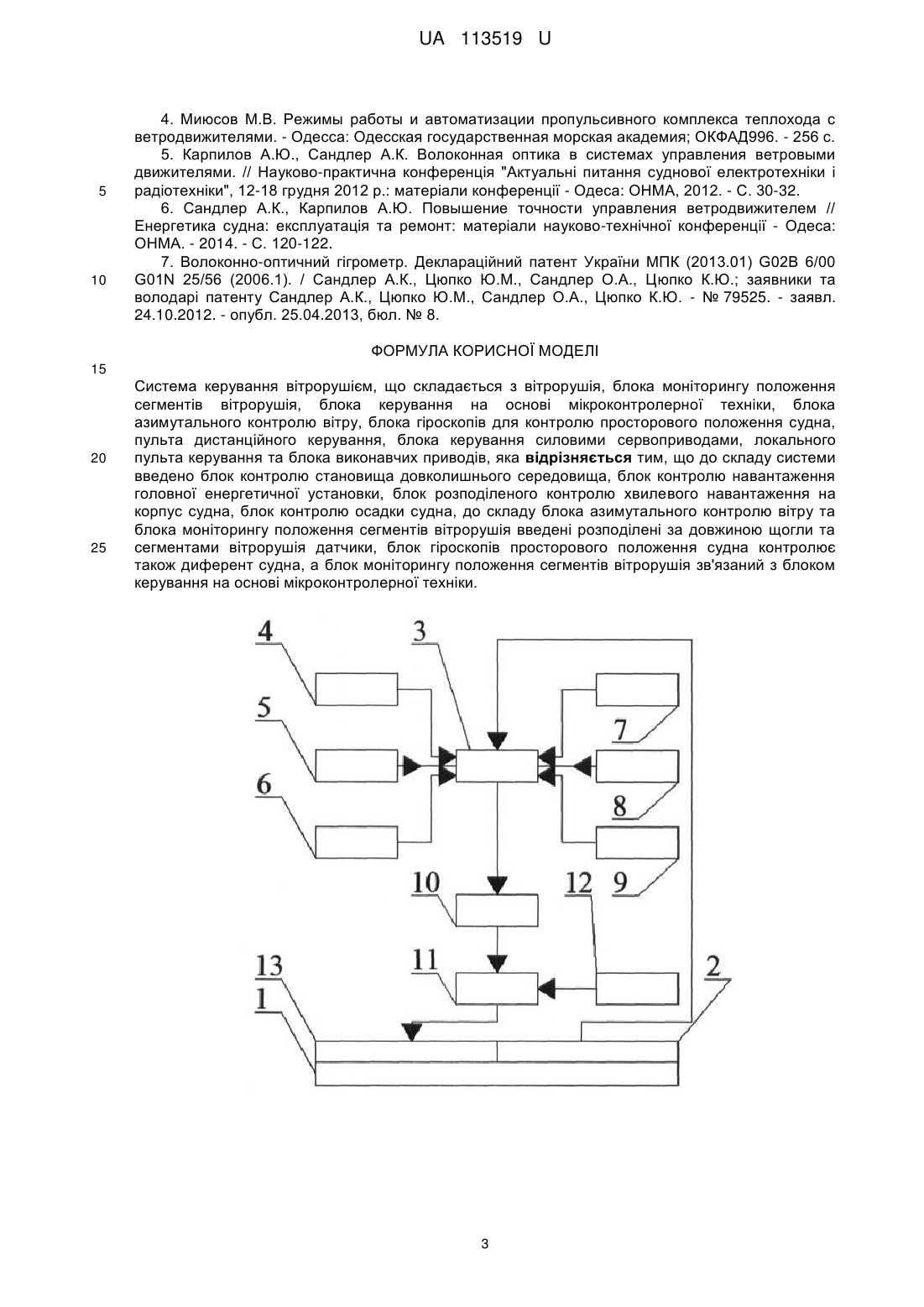
Реферат: Система керування вітрорушієм складається з вітрорушія, блока моніторингу положення сегментів вітрорушія, блока керування на основі мікроконтролерної техніки, блока азимутального контролю вітру, блока гіроскопів для контролю просторового положення судна, пульта дистанційного керування, блока керування силовими сервоприводами, локального пульта керування та блока виконавчих приводів. До складу системи введено блок контролю становища довколишнього середовища, блок контролю навантаження головної енергетичної установки, блок розподіленого контролю хвилевого навантаження на корпус судна, блок контролю осадки судна. До складу блока азимутального контролю вітру та блока моніторингу положення сегментів вітрорушія введені розподілені за довжиною щогли та сегментами вітрорушія датчики. Блок гіроскопів просторового положення судна контролює також диферент судна, а блок моніторингу положення сегментів вітрорушія зв'язаний з блоком керування на основі мікроконтролерної техніки. UA 113519 U (54) СИСТЕМА КЕРУВАННЯ ВІТРОРУШІЄМ UA 113519 U UA 113519 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем керування допоміжним багатосегментним жорстким вітрильним вітрорушієм. Область застосування - керування допоміжним вітрильним вітрорушієм, що використовується у єдиному пропульсивному комплексі разом двигуном внутрішнього згоряння [1, 2]. Відома керування вітрильним вітрорушієм, що містить блок моніторингу положення вітрорушія, блок керування на основі релейної техніки, блок контролю напрямку та швидкість вітру, пульт дистанційного керування, блок керування силовими сервоприводами, блок виконавчих приводів [3]. Недоліки пристрою, які обумовлені здійснення керування вітрорушієм тільки на підставі інформації з блока контролю напрямку та швидкості вітру: - відсутній контроль навігаційних та гідрометеорологічних чинників; - відсутність корегування станом вітрорушія від навантаження головної енергетичної установки, навігаційних та гідрометеорологічних чинників; - неможливість керування окремими сегментами вітрорушія для ефективного використання енергії вітру на різних висотах щогли; - недостатня швидкість реагування релейної техніки на швидкі зміни повітряного тиску вітру у штормових умовах. Найбільш близьким аналогом за технічною суттю та результатом, що досягається, є система керування вітрорушієм, яка складається з блока моніторингу положення вітрорушія, блок керування на основі мікроконтролерної техніки, блока азимутального контролю вітру, блока контролю крену судна, пульту дистанційного керування, блока керування силовими сервоприводами, локального пульту керування, блока виконавчих приводів [4]. Недоліки пристрою, які обумовлені які обумовлені здійснення керування вітрорушієм тільки на підставі інформації з блоків контролю напрямку та швидкості вітру крену судна та зв'язку блока моніторингу положення вітрорушія безпосередньо з блоком керування силовими сервоприводами: - відсутній контроль навігаційних та гідрометеорологічних чинників; - відсутність корегування станом вітрорушія від навантаження головної енергетичної установки, навігаційних та гідрометеорологічних чинників; - неможливість керування окремими сегментами вітрорушія для ефективного використання енергії вітру на різних висотах щогли; - неможливість внесення необхідних поправок керування, що ураховують стан поверхні вітрорушія (зволоження, обмерзання, тощо). Задачею корисної моделі є створення системи керування вітрорушієм, у якій присутній контроль навігаційних та гідрометеорологічних чинників, є можливість корегування станом вітрорушія від навантаження головної енергетичної установки, навігаційних та гідрометеорологічних чинників, відбувається керування окремими сегментами вітрорушія для ефективного використання енергії вітру на різних висотах щогли з урахуванням стану поверхні вітрорушія та одночасно збережені високий рівень чутливості та простота та надійність схемотехнічних рішень систем відомих типів. Поставлена задача вирішується тим, що система керування вітрорушієм, що складається з вітрорушія, блока моніторингу положення сегментів вітрорушія, блока керування на основі мікроконтролерної техніки, блока азимутального контролю вітру, блока гіроскопів для контролю просторового положення судна, пульту дистанційного керування, блока керування силовими сервоприводами, локального пульту керування та блока виконавчих приводів, згідно з корисною моделлю, до складу системи залучені блок контролю становища довколишнього середовища, блок контролю навантаження головної енергетичної установки, блок розподіленого контролю хвилевого навантаження на корпус судна, блок контролю осадки судна, до складу блока азимутального контролю вітру та блока моніторингу положення сегментів вітрорушія залучені розподілені за довжиною щогли та сегментами вітрорушія датчики, блок гіроскопів для контролю просторового положення судна контролює також диферент судна, а блок моніторингу положення сегментів вітрорушія зв’язаний з блоком керування на основі мікроконтролерної техніки. Технічний результат досягається завдяки тому, що комбінація оптичних елементів забезпечує: - більш адекватного перетворення параметрів тиску вітрового поля у швидкість ходу судна; - врахування й компенсацію впливу гідрометеорологічних та навігаційних чинників судноводіння; - підвищення коефіцієнту корисної дії вітрорушія за рахунок пошарового керування сегментами вітрорушія; 1 UA 113519 U 5 10 15 20 25 30 35 40 45 50 55 60 - можливість внесення необхідних поправок керування, що ураховують стан поверхні вітрорушія (зволоження, обмерзання тощо). Суть корисної моделі пояснюється кресленням, де зображено система керування вітрорушієм, що складається з вітрорушія 1, блока моніторингу положення сегментів вітрорушія 2, блока керування на основі мікроконтролерної техніки 3, блока азимутального контролю вітру 4, блока гіроскопів для контролю просторового положення судна 5, пульту дистанційного керування 10, блока керування силовими сервоприводами 11, локального пульту керування 12 та блока виконавчих приводів 13. Крім того, до складу системи залучені блок контролю становища довколишнього середовища 6, блок контролю навантаження головної енергетичної установки 7, блок розподіленого контролю хвилевого навантаження на корпус судна 8, блок контролю осадки судна 9. Інформація до блока азимутального контролю вітру та блока моніторингу положення сегментів вітрорушія надходить від розгалуженої мережі розподілених за довжиною щогли та сегментами вітрорушія датчиків. На блок гіроскопів просторового положення судна поставлена задача контролю не тільки крену, але й диференту судна. А інформація, стосовно положення сегментів вітрорушія (відповідний блок моніторингу), надходить безпосередньо до блока керування на основі мікроконтролерної техніки. Команди на корегування положення сегментів вітрорушія генеруються як наслідок багатофакторного аналізу стану головної енергетичної установки, навігаційних та гідрометеорологічних чинників [5, 6, 7]. Креслення: Система керування вітрорушієм: 1 - вітрорушій (жорстке сегментне вітрило); 2 - блок моніторингу положення сегментів вітрорушія; 3 - блок керування на основі мікроконтролерної техніки; 4 - блок азимутального контролю вітру; 5 - блок гіроскопів для контролю просторового положення судна (крен та диферент); 6 - блок контролю становища довколишнього середовища; 7 - блок контролю навантаження головної енергетичної установки; 8 - блок розподіленого контролю хвилевого навантаження на корпус судна; 9 - блок контролю осадки судна; 10 - пульт дистанційного керування; 11 - блок керування силовими сервоприводами; 12 локальний пульт керування; 13 - блок виконавчих приводів. Відомості, які підтверджують можливість здійснення корисної моделі. Для здійснення корисної моделі застосовано комбінацію блоків контролю стану головної енергетичної установки, навігаційних та гідрометеорологічних чинників. У статичному режимі (судно ошвартоване до причалу перед виходом у море) ґрунтуючись на даних щодо вологості та температури повітря, а також крену та диференту судна, блоком контролерної техніки створюються первинні поправки та корегується первинне просторове положення сегментів вітрорушія. У динамічному режимі (режим повного ходу) основний керуючий сигнал для корегування просторового положення сегментів вітрорушія кожного ярусу генерується в блоках контролю навантаження головної енергетичної установки, азимутального контролю вітру, гіроскопів для контролю просторового положення судна, розподіленого контролю хвилевого навантаження на корпус судна та контролю осадки судна. У цих блоках опрацювання вхідної інформації та корегуючих сигналів виключно в масштабі реального часу. У динамічному режимі (аварійний режим) корегуючий сигнал на зміну кута сегментів вітрорушія або повного згортання вітрорушія генерується після фіксації блоками азимутального контролю вітру, гіроскопів для контролю просторового положення судна та розподіленого контролю хвилевого навантаження на корпус судна значень, перевищення яких може створити безпеку для подальшої експлуатації судна. Таким чином, відбувається керування вітрорушієм з урахуванням всіх пропульсивних, навігаційних та гідрометеорологічних чинників. Джерела інформації: 1. Бурмакин О.А., Малышев Ю.С., Варечкин Ю.В., Сычушкин И.В. Обоснование эффективности судовых ветрогенераторных установок. // Труды Нижегородского государственного технического университета им. Р.Е. Алексеева / НГТУ им. Р.Е. Алексеева. Нижний Новгород, 2014. - № 2 (104). - С. 160-166. 2. Вагущенко Л.Л., Цымбал Н.Н. Системы автоматического управления движением судна. 3-е изд., перераб. и доп. - Одесса: Феникс, 2007. - 328 с. 3. Система автоматического управления парусами грузового судна со вспомогательным парусным вооружением/ Масанори И.: КР ВЦП. - КЛ-73716. - 27 с. Кейсоку то сейге. - 1984. - 23. № 2. - С. 190-197. 2 UA 113519 U 5 10 4. Миюсов М.В. Режимы работы и автоматизации пропульсивного комплекса теплохода с ветродвижителями. - Одесса: Одесская государственная морская академия; ОКФАД996. - 256 с. 5. Карпилов А.Ю., Сандлер А.К. Волоконная оптика в системах управления ветровыми движителями. // Науково-практична конференція "Актуальні питання суднової електротехніки і радіотехніки", 12-18 грудня 2012 p.: матеріали конференції - Одеса: ОНМА, 2012. - С. 30-32. 6. Сандлер А.К., Карпилов А.Ю. Повышение точности управления ветродвижителем // Енергетика судна: експлуатація та ремонт: матеріали науково-технічної конференції - Одеса: ОНМА. - 2014. - С. 120-122. 7. Волоконно-оптичний гігрометр. Деклараційний патент України МПК (2013.01) G02B 6/00 G01N 25/56 (2006.1). / Сандлер А.К., Цюпко Ю.М., Сандлер О.А., Цюпко К.Ю.; заявники та володарі патенту Сандлер А.К., Цюпко Ю.М., Сандлер О.А., Цюпко К.Ю. - № 79525. - заявл. 24.10.2012. - опубл. 25.04.2013, бюл. № 8. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Система керування вітрорушієм, що складається з вітрорушія, блока моніторингу положення сегментів вітрорушія, блока керування на основі мікроконтролерної техніки, блока азимутального контролю вітру, блока гіроскопів для контролю просторового положення судна, пульта дистанційного керування, блока керування силовими сервоприводами, локального пульта керування та блока виконавчих приводів, яка відрізняється тим, що до складу системи введено блок контролю становища довколишнього середовища, блок контролю навантаження головної енергетичної установки, блок розподіленого контролю хвилевого навантаження на корпус судна, блок контролю осадки судна, до складу блока азимутального контролю вітру та блока моніторингу положення сегментів вітрорушія введені розподілені за довжиною щогли та сегментами вітрорушія датчики, блок гіроскопів просторового положення судна контролює також диферент судна, а блок моніторингу положення сегментів вітрорушія зв'язаний з блоком керування на основі мікроконтролерної техніки. 3 UA 113519 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F03D 7/04
Мітки: система, керування, вітрорушієм
Код посилання
<a href="https://ua.patents.su/6-113519-sistema-keruvannya-vitrorushiehm.html" target="_blank" rel="follow" title="База патентів України">Система керування вітрорушієм</a>
Система керування функціональними режимами радіолокаційної станції
Номер патенту: 30978
Опубліковано: 25.03.2008
Автори: Вовк Олександр Іванович, Челпанов Артем Володимирович, Карлов Володимир Дмитрович, Шматков Сергій Ігорович
МПК: G01S 13/52
Мітки: функціональними, станції, радіолокаційної, система, керування, режимами
Формула / Реферат:
Система керування функціональними режимами радіолокаційної станції (РЛС), що містить вузол обробки інформації, вузол керування ресурсами РЛС та вузол керування режимом супроводу у складі послідовно включених блока класифікації, блока розподілу заявок на супровід цілей і блока оцінки потрібної енергії, яка відрізняється тим, що додатково введені: послідовно з'єднані блок оцінки інтенсивності потоку цілей і блок групування цілей, послідовно...
Система керування резонансним інвертором
Номер патенту: 46316
Опубліковано: 10.12.2009
Автори: Середа Сергій Миколайович, Ушаков Володимир Іванович, Кобець Данило Васильович
МПК: H02M 7/539
Мітки: система, інвертором, керування, резонансним
Формула / Реферат:
Система керування резонансним інвертором, що включає блок неузгодження, на перший вхід якого надходить вхідний струм резонансного інвертора, а другий вхід підключений до виходу датчика поточного струму навантаження, а також блок формування імпульсів керування ключами, вихід якого підключений до резонансного інвертора, яка відрізняється тим, що містить блок нечіткої логіки, до одного входу якого підключений вихід блока неузгодження, а до...
Система керування ракети в каналі тангажа
Номер патенту: 98664
Опубліковано: 12.05.2015
Автори: Дорощук Катерина Ігорівна, Симонов Володимир Федорович
МПК: B64C 13/16
Мітки: система, керування, тангажа, каналі, ракети
Формула / Реферат:
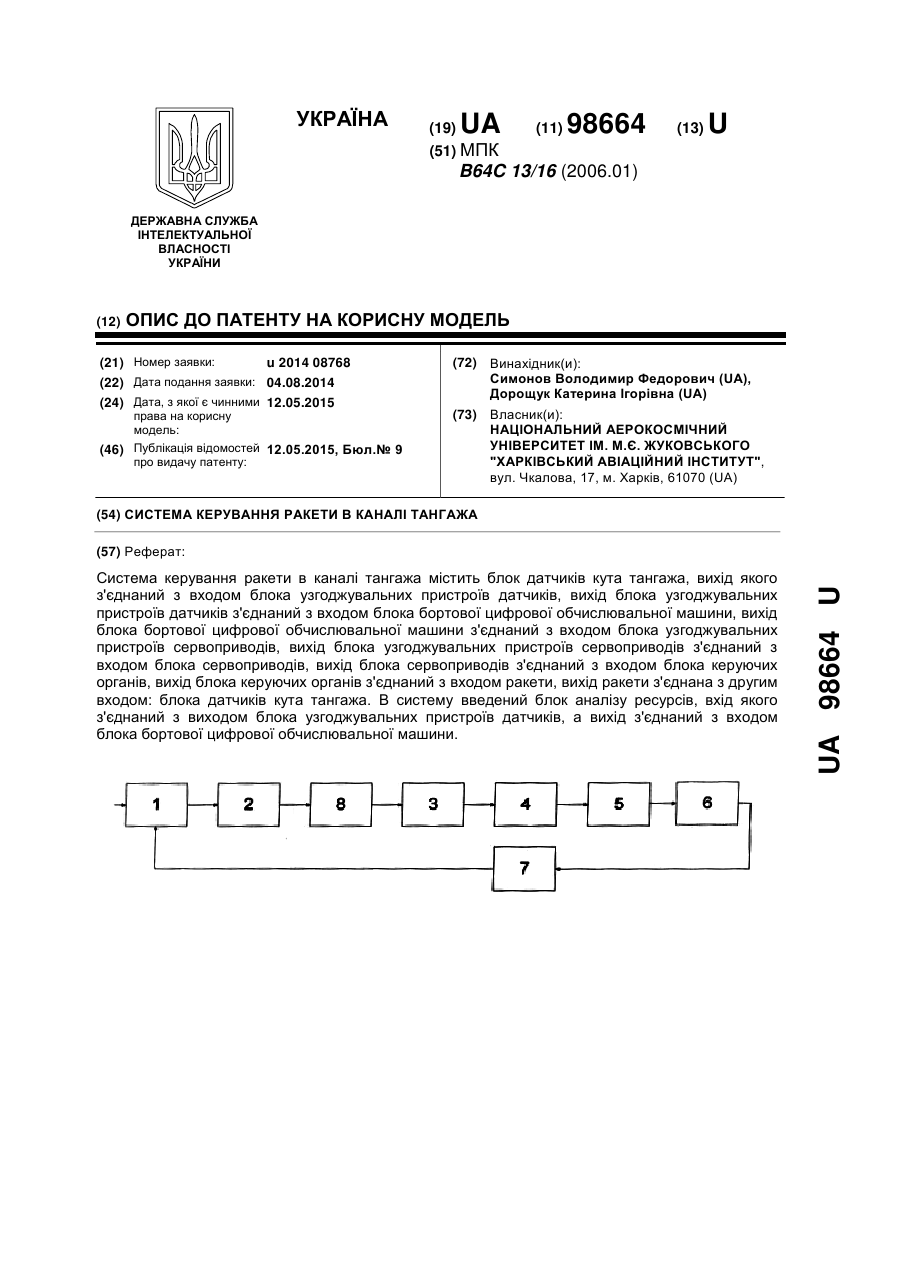
Система керування ракети в каналі тангажа, яка містить блок датчиків кута тангажа, вихід якого з'єднаний з входом блока узгоджувальних пристроїв датчиків, вихід блока узгоджувальних пристроїв датчиків з'єднаний з входом блока бортової цифрової обчислювальної машини, вихід блока бортової цифрової обчислювальної машини з'єднаний з входом блока узгоджувальних пристроїв сервоприводів, вихід блока узгоджувальних пристроїв сервоприводів з'єднаний...
Система автоматизованого керування й контролю вагона-автомобілевоза

Номер патенту: 37007
Опубліковано: 10.11.2008
Автори: Рачок Микола Миколайович, Зибін Віктор Георгійович, Макаренко Валентин Миколайович, Бандура Іван Миколайович
МПК: H02B 15/00
Мітки: керування, вагона-автомобілевоза, автоматизованого, система, контролю
Формула / Реферат:
Система автоматизованого керування й контролю вагона-автомобілевоза, яка відрізняється тим, що в неї уведені система пожежної сигналізації й блок керування й контролю, що містить джерело живлення, обмежник напруги, перший вихід якого з'єднаний з першим входом блока комутації, а другий його вихід з'єднаний із входом системи контролю нагрівання букс, контролер, перший вихід якого з'єднаний із другим входом блока комутації, а другий його вихід...
Система керування ракети у каналі тангажа
Номер патенту: 98663
Опубліковано: 12.05.2015
Автори: Симонов Володимир Федорович, Ігнатьєва Катерина Олександрівна
МПК: B64C 13/16
Мітки: ракети, каналі, система, тангажа, керування
Формула / Реферат:
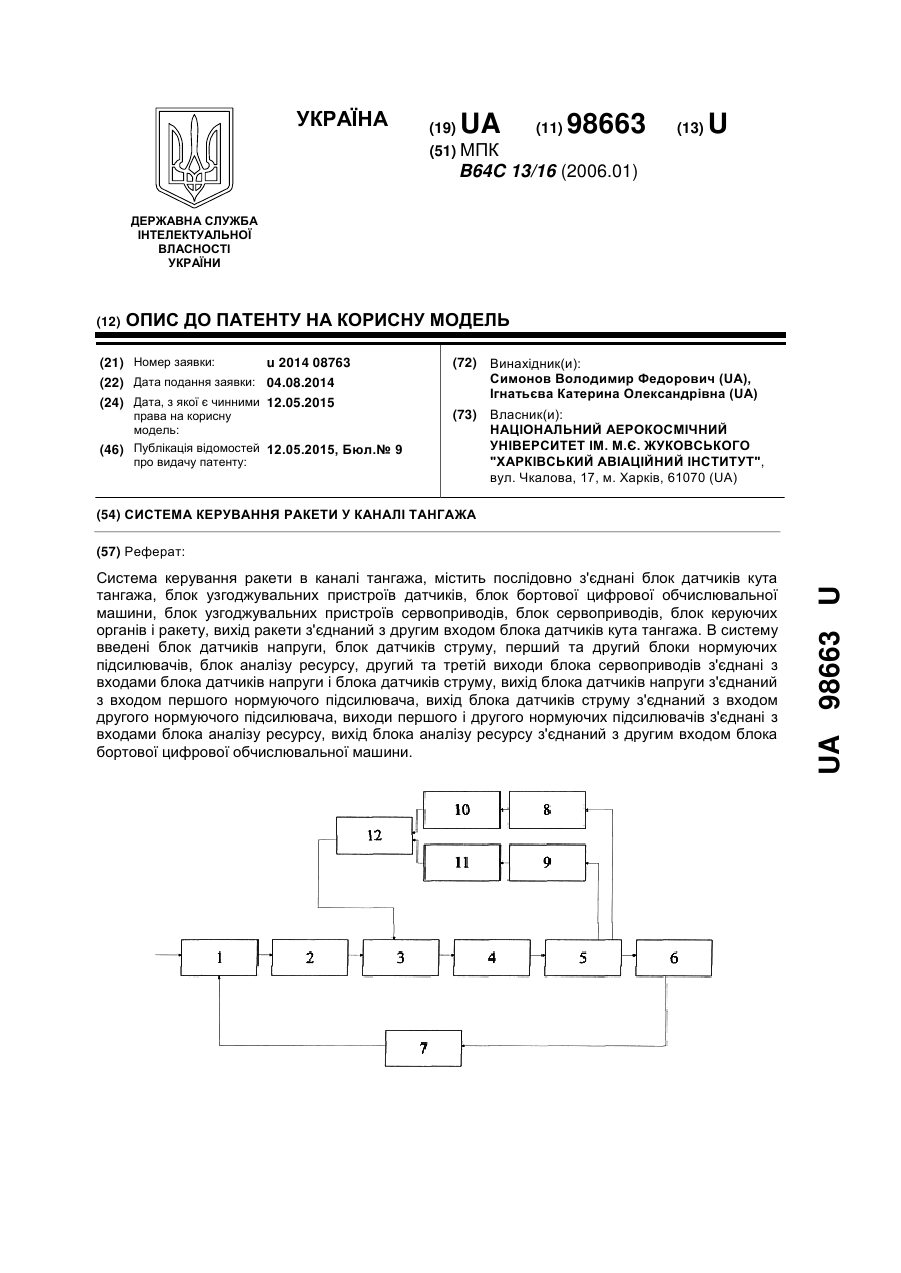
Система керування ракети в каналі тангажа, яка містить послідовно з'єднані блок датчиків кута тангажа, блок узгоджувальних пристроїв датчиків, блок бортової цифрової обчислювальної машини, блок узгоджувальних пристроїв сервоприводів, блок сервоприводів, блок керуючих органів і ракету, вихід ракети з'єднаний з другим входом блока датчиків кута тангажа, яка відрізняється тим, що в систему введені блок датчиків напруги, блок датчиків струму,...
Попередній патент: Декорована огорода
Наступний патент: Спосіб дистанційної аутентифікації та авторизації користувача
Випадковий патент: Пристрій для плавки ожеледі на повітряних лініях електропередач степана філіпчука