Система керування ракети у каналі тангажа
Номер патенту: 98663
Опубліковано: 12.05.2015
Автори: Симонов Володимир Федорович, Ігнатьєва Катерина Олександрівна

Формула / Реферат
Система керування ракети в каналі тангажа, яка містить послідовно з'єднані блок датчиків кута тангажа, блок узгоджувальних пристроїв датчиків, блок бортової цифрової обчислювальної машини, блок узгоджувальних пристроїв сервоприводів, блок сервоприводів, блок керуючих органів і ракету, вихід ракети з'єднаний з другим входом блока датчиків кута тангажа, яка відрізняється тим, що в систему введені блок датчиків напруги, блок датчиків струму, перший та другий блоки нормуючих підсилювачів, блок аналізу ресурсу, другий та третій виходи блока сервоприводів з'єднані з входами блока датчиків напруги і блока датчиків струму, вихід блока датчиків напруги з'єднаний з входом першого нормуючого підсилювача, вихід блока датчиків струму з'єднаний з входом другого нормуючого підсилювача, виходи першого і другого нормуючих підсилювачів з'єднані з входами блока аналізу ресурсу, вихід блока аналізу ресурсу з'єднаний з другим входом блока бортової цифрової обчислювальної машини.
Текст
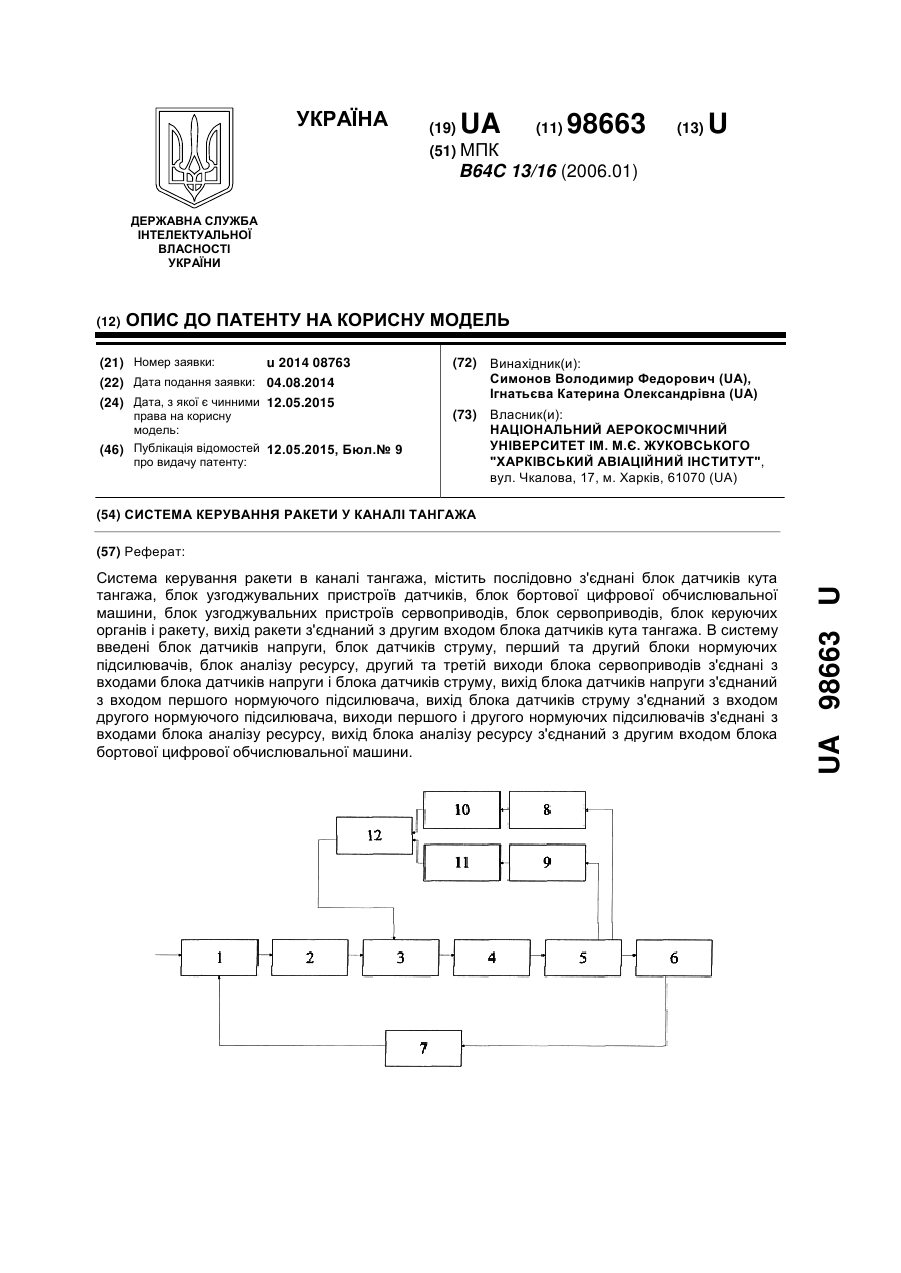
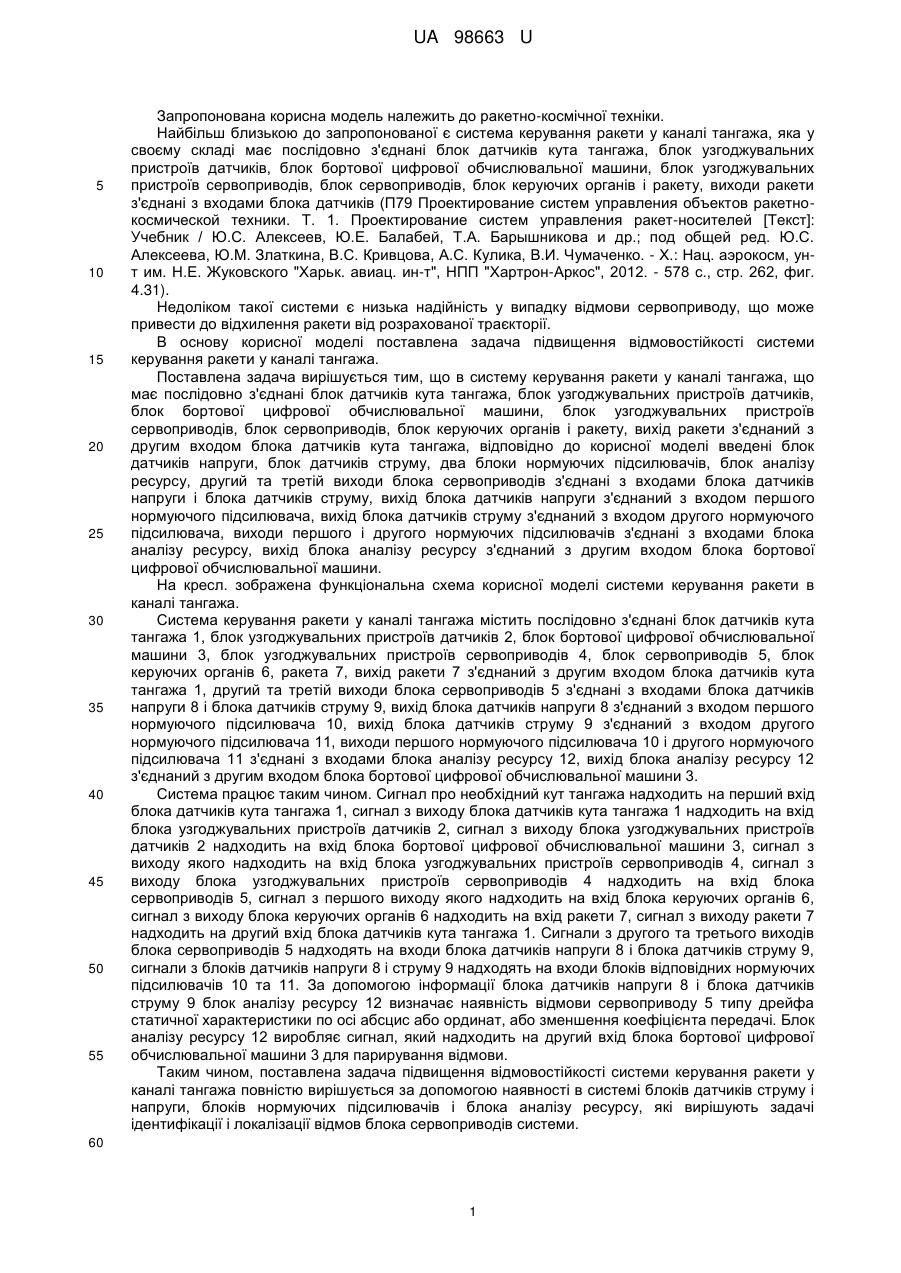
Реферат: UA 98663 U UA 98663 U 5 10 15 20 25 30 35 40 45 50 55 Запропонована корисна модель належить до ракетно-космічної техніки. Найбільш близькою до запропонованої є система керування ракети у каналі тангажа, яка у своєму складі має послідовно з'єднані блок датчиків кута тангажа, блок узгоджувальних пристроїв датчиків, блок бортової цифрової обчислювальної машини, блок узгоджувальних пристроїв сервоприводів, блок сервоприводів, блок керуючих органів і ракету, виходи ракети з'єднані з входами блока датчиків (П79 Проектирование систем управления объектов ракетнокосмической техники. Т. 1. Проектирование систем управления ракет-носителей [Текст]: Учебник / Ю.С. Алексеев, Ю.Е. Балабей, Т.А. Барышникова и др.; под общей ред. Ю.С. Алексеева, Ю.М. Златкина, B.C. Кривцова, А.С. Кулика, В.И. Чумаченко. - X.: Нац. аэрокосм, унт им. Н.Е. Жуковского "Харьк. авиац. ин-т", НПП "Хартрон-Аркос", 2012. - 578 с., стр. 262, фиг. 4.31). Недоліком такої системи є низька надійність у випадку відмови сервоприводу, що може привести до відхилення ракети від розрахованої траєкторії. В основу корисної моделі поставлена задача підвищення відмовостійкості системи керування ракети у каналі тангажа. Поставлена задача вирішується тим, що в систему керування ракети у каналі тангажа, що має послідовно з'єднані блок датчиків кута тангажа, блок узгоджувальних пристроїв датчиків, блок бортової цифрової обчислювальної машини, блок узгоджувальних пристроїв сервоприводів, блок сервоприводів, блок керуючих органів і ракету, вихід ракети з'єднаний з другим входом блока датчиків кута тангажа, відповідно до корисної моделі введені блок датчиків напруги, блок датчиків струму, два блоки нормуючих підсилювачів, блок аналізу ресурсу, другий та третій виходи блока сервоприводів з'єднані з входами блока датчиків напруги і блока датчиків струму, вихід блока датчиків напруги з'єднаний з входом першого нормуючого підсилювача, вихід блока датчиків струму з'єднаний з входом другого нормуючого підсилювача, виходи першого і другого нормуючих підсилювачів з'єднані з входами блока аналізу ресурсу, вихід блока аналізу ресурсу з'єднаний з другим входом блока бортової цифрової обчислювальної машини. На кресл. зображена функціональна схема корисної моделі системи керування ракети в каналі тангажа. Система керування ракети у каналі тангажа містить послідовно з'єднані блок датчиків кута тангажа 1, блок узгоджувальних пристроїв датчиків 2, блок бортової цифрової обчислювальної машини 3, блок узгоджувальних пристроїв сервоприводів 4, блок сервоприводів 5, блок керуючих органів 6, ракета 7, вихід ракети 7 з'єднаний з другим входом блока датчиків кута тангажа 1, другий та третій виходи блока сервоприводів 5 з'єднані з входами блока датчиків напруги 8 і блока датчиків струму 9, вихід блока датчиків напруги 8 з'єднаний з входом першого нормуючого підсилювача 10, вихід блока датчиків струму 9 з'єднаний з входом другого нормуючого підсилювача 11, виходи першого нормуючого підсилювача 10 і другого нормуючого підсилювача 11 з'єднані з входами блока аналізу ресурсу 12, вихід блока аналізу ресурсу 12 з'єднаний з другим входом блока бортової цифрової обчислювальної машини 3. Система працює таким чином. Сигнал про необхідний кут тангажа надходить на перший вхід блока датчиків кута тангажа 1, сигнал з виходу блока датчиків кута тангажа 1 надходить на вхід блока узгоджувальних пристроїв датчиків 2, сигнал з виходу блока узгоджувальних пристроїв датчиків 2 надходить на вхід блока бортової цифрової обчислювальної машини 3, сигнал з виходу якого надходить на вхід блока узгоджувальних пристроїв сервоприводів 4, сигнал з виходу блока узгоджувальних пристроїв сервоприводів 4 надходить на вхід блока сервоприводів 5, сигнал з першого виходу якого надходить на вхід блока керуючих органів 6, сигнал з виходу блока керуючих органів 6 надходить на вхід ракети 7, сигнал з виходу ракети 7 надходить на другий вхід блока датчиків кута тангажа 1. Сигнали з другого та третього виходів блока сервоприводів 5 надходять на входи блока датчиків напруги 8 і блока датчиків струму 9, сигнали з блоків датчиків напруги 8 і струму 9 надходять на входи блоків відповідних нормуючих підсилювачів 10 та 11. За допомогою інформації блока датчиків напруги 8 і блока датчиків струму 9 блок аналізу ресурсу 12 визначає наявність відмови сервоприводу 5 типу дрейфа статичної характеристики по осі абсцис або ординат, або зменшення коефіцієнта передачі. Блок аналізу ресурсу 12 виробляє сигнал, який надходить на другий вхід блока бортової цифрової обчислювальної машини 3 для парирування відмови. Таким чином, поставлена задача підвищення відмовостійкості системи керування ракети у каналі тангажа повністю вирішується за допомогою наявності в системі блоків датчиків струму і напруги, блоків нормуючих підсилювачів і блока аналізу ресурсу, які вирішують задачі ідентифікації і локалізації відмов блока сервоприводів системи. 60 1 UA 98663 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Система керування ракети в каналі тангажа, яка містить послідовно з'єднані блок датчиків кута тангажа, блок узгоджувальних пристроїв датчиків, блок бортової цифрової обчислювальної машини, блок узгоджувальних пристроїв сервоприводів, блок сервоприводів, блок керуючих органів і ракету, вихід ракети з'єднаний з другим входом блока датчиків кута тангажа, яка відрізняється тим, що в систему введені блок датчиків напруги, блок датчиків струму, перший та другий блоки нормуючих підсилювачів, блок аналізу ресурсу, другий та третій виходи блока сервоприводів з'єднані з входами блока датчиків напруги і блока датчиків струму, вихід блока датчиків напруги з'єднаний з входом першого нормуючого підсилювача, вихід блока датчиків струму з'єднаний з входом другого нормуючого підсилювача, виходи першого і другого нормуючих підсилювачів з'єднані з входами блока аналізу ресурсу, вихід блока аналізу ресурсу з'єднаний з другим входом блока бортової цифрової обчислювальної машини. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюSymonov Volodymyr Fedorovych
Автори російськоюСимонов Владимир Федорович
МПК / Мітки
МПК: B64C 13/16
Мітки: ракети, тангажа, керування, каналі, система
Код посилання
<a href="https://ua.patents.su/4-98663-sistema-keruvannya-raketi-u-kanali-tangazha.html" target="_blank" rel="follow" title="База патентів України">Система керування ракети у каналі тангажа</a>
Система управління кутом тангажа літального апарата
Номер патенту: 98659
Опубліковано: 12.05.2015
Автори: Карпова Тетяна Володимирівна, Симонов Володимир Федорович
МПК: B64C 13/18, G05D 1/08
Мітки: система, апарата, літального, управління, тангажа, кутом
Формула / Реферат:
Система управління кутом тангажа літального апарата, що містить послідовно з'єднані блок задатчика сигналу тангажа, блок порівняння, інтегратор, перший блок підсилювача, суматор, підсилювач рульової машини, рульову машину, руль висоти, літальний апарат, а також містить другий та третій блоки підсилювачів, зворотний зв'язок, датчик кутової швидкості, датчик кутового положення, при цьому другий вхід блока порівняння з'єднаний з виходом датчика...
Система керування безпілотного літального апарата

Номер патенту: 65814
Опубліковано: 12.12.2011
Автори: Антонєвич Ганна Олександрівна, Фірсов Сергій Миколайович, Кописов Олег Едуардович
МПК: B64C 13/00
Мітки: безпілотного, керування, літального, апарата, система
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також трьох датчиків кута та трьох датчиків кутової швидкості, виходи яких з'єднані з входами відповідно першого, п'ятого, шостого, другого, сьомого, восьмого нормуючих підсилювачів,...
Система керування безпілотного літального апарата
Номер патенту: 53726
Опубліковано: 11.10.2010
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Бекетов Антон Сергійович, Кописов Олег Едуардович, Єрмакова Вікторія Валеріївна
МПК: B64C 13/00
Мітки: система, літального, безпілотного, керування, апарата
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчика кута та датчика кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, датчика напруги, вхід якого з'єднаний з другим виходом...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Симонов Володимир Федорович, Честних Тимур Володимирович
МПК: B64C 13/00, G05D 1/03
Мітки: система, безпілотного, літального, апарата, керування
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Блок відмовостійких сервоприводів для каналу тангажа

Номер патенту: 58997
Опубліковано: 26.04.2011
Автор: Кулік Анатолій Степанович
МПК: G05D 1/00
Мітки: блок, каналу, відмовостійких, сервоприводів, тангажа
Формула / Реферат:
Блок відмовостійких сервоприводів для каналу тангажа, який містить два двигуни-маховики, два аналогово-цифрові перетворювачі, генератор видів відмов, два імітатори видів відмов, блок діагностування видів відмов, блок відновлення працездатності, дві шини керування, два керуючі входи, групу інформаційних виходів, причому виходи датчиків першого двигуна-маховика з'єднані з входами першого аналогово-цифрового перетворювача, виходи якого з'єднані...
Попередній патент: Формувач одиночної триімпульсної кодової серії з програмованими часовими параметрами
Наступний патент: Система керування ракети в каналі тангажа
Випадковий патент: Помадна цукерка "беліссімо" шоколадний крем"