Монорейкова система переміщення платформи


Формула / Реферат
1. Монорейкова система переміщення платформи, що сконструйована з рейкової опори, встановленої так, що її площини утворюють кут 45° з площиною горизонту, візка кріплення обладнання та його переміщення, трьох роликів кочення, змонтованих з кожної сторони рейкової опори під кутом 90° один до одного на протилежних ребрах рейки, яка відрізняється тим, що з кожної сторони розташовано ролики, які в площині дотику до граней рейкової опори утворюють рівносторонній трикутник.
2. Монорейкова система переміщення платформи за п. 1, яка відрізняється тим, що верхній ролик розміщений у вікні каретки візка.
3. Монорейкова система переміщення платформи за п. 1 або 2, яка відрізняється тим, що обладнана аретиром з можливістю регулювати положення розташування візка із змонтованим обладнанням та швидкість його переміщення.
4. Монорейкова система переміщення платформи за будь-яким з пп. 1-3, яка відрізняється тим, що як рейкову опору застосовують рівносторонній (рівнополичний) кутник з величиною товщини стінки рівною або більшою ширини ролика.
Текст
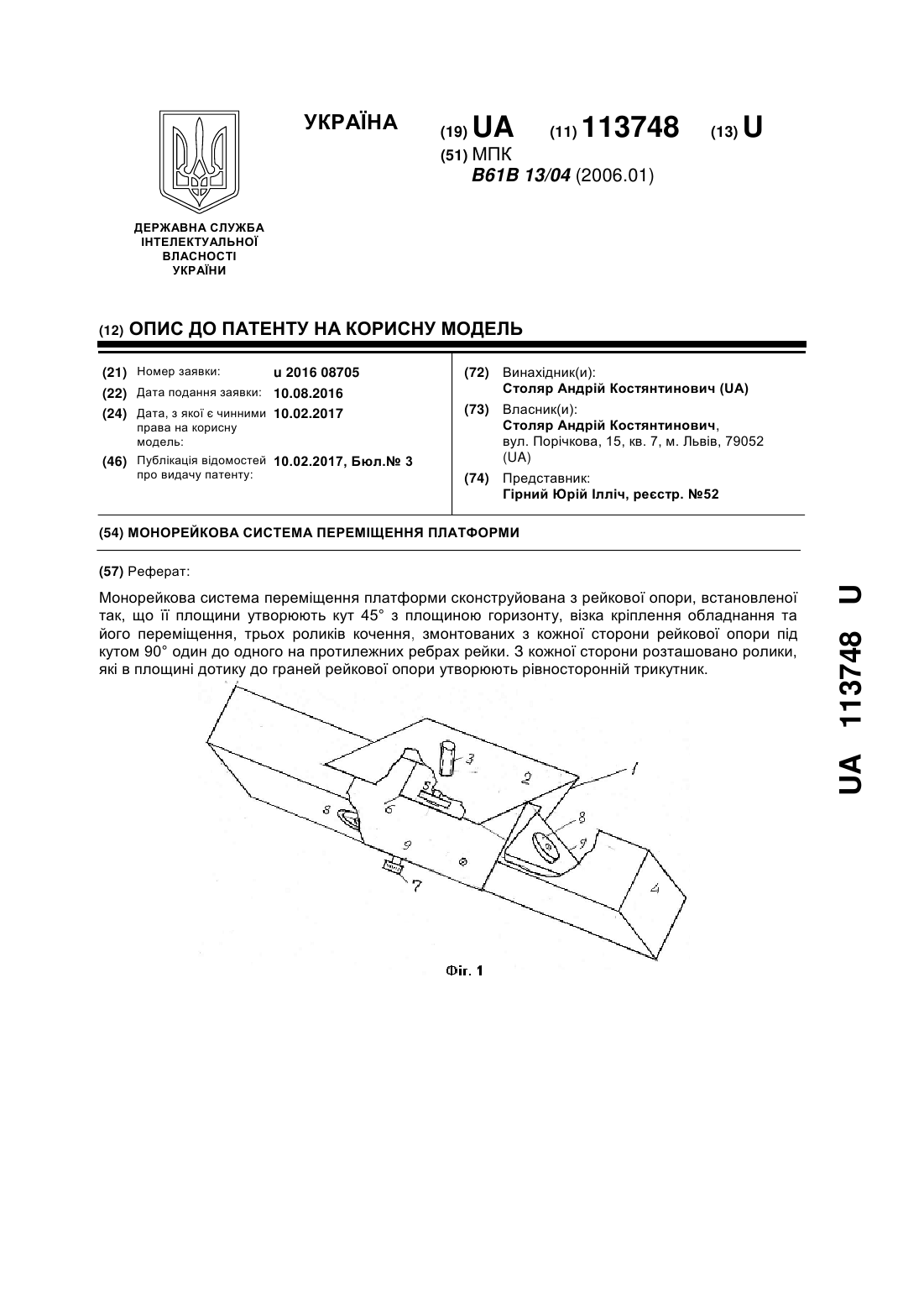
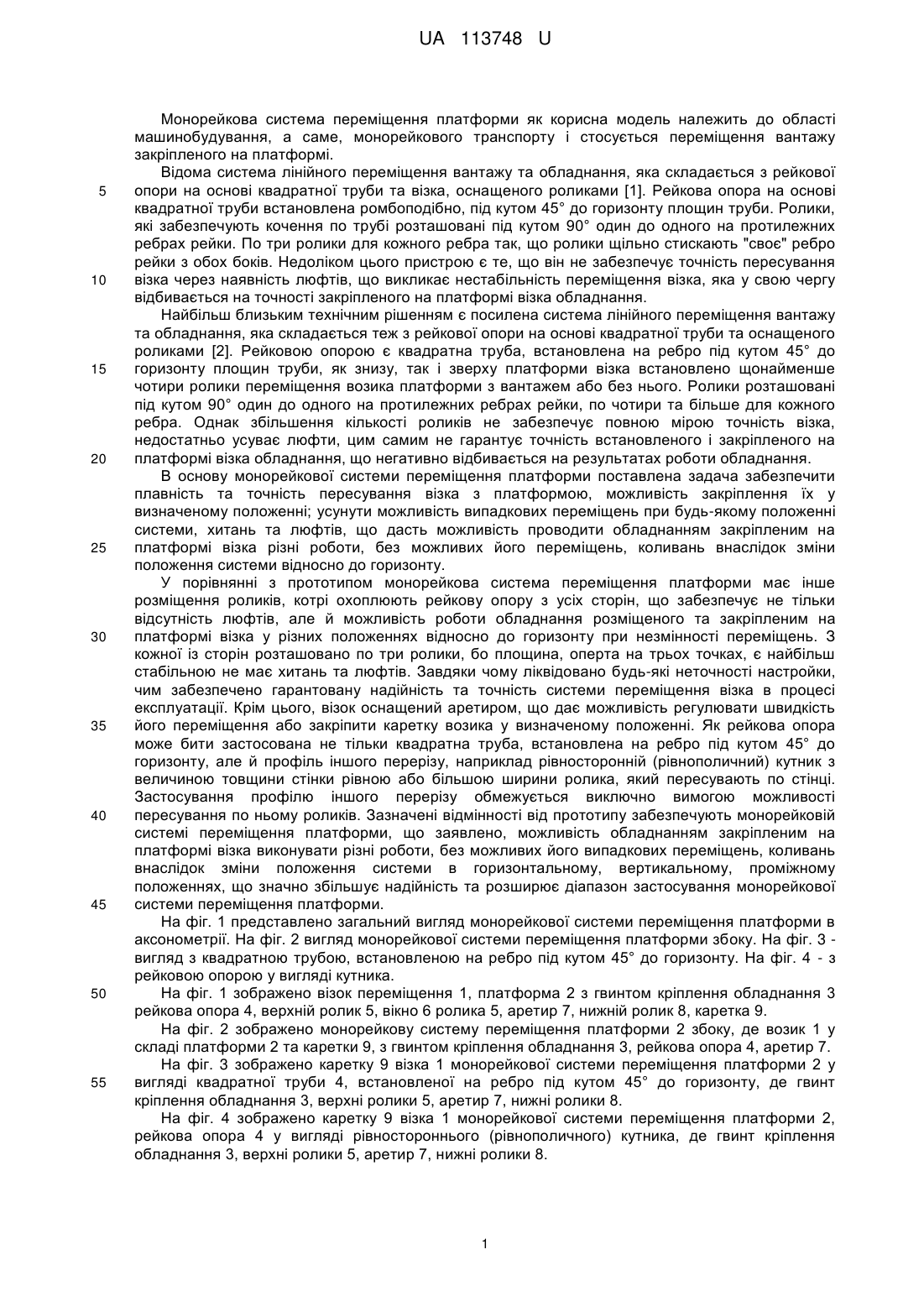
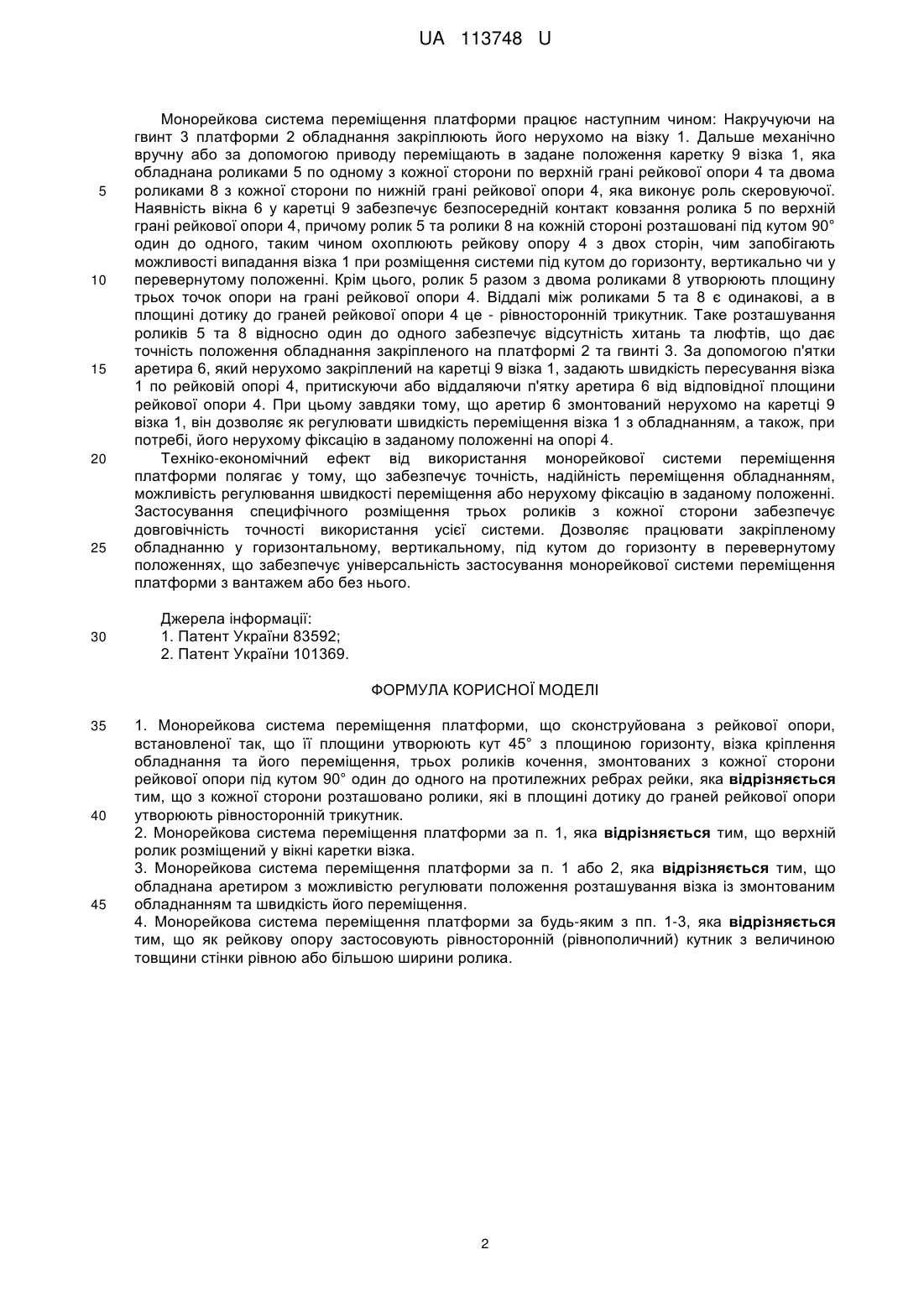
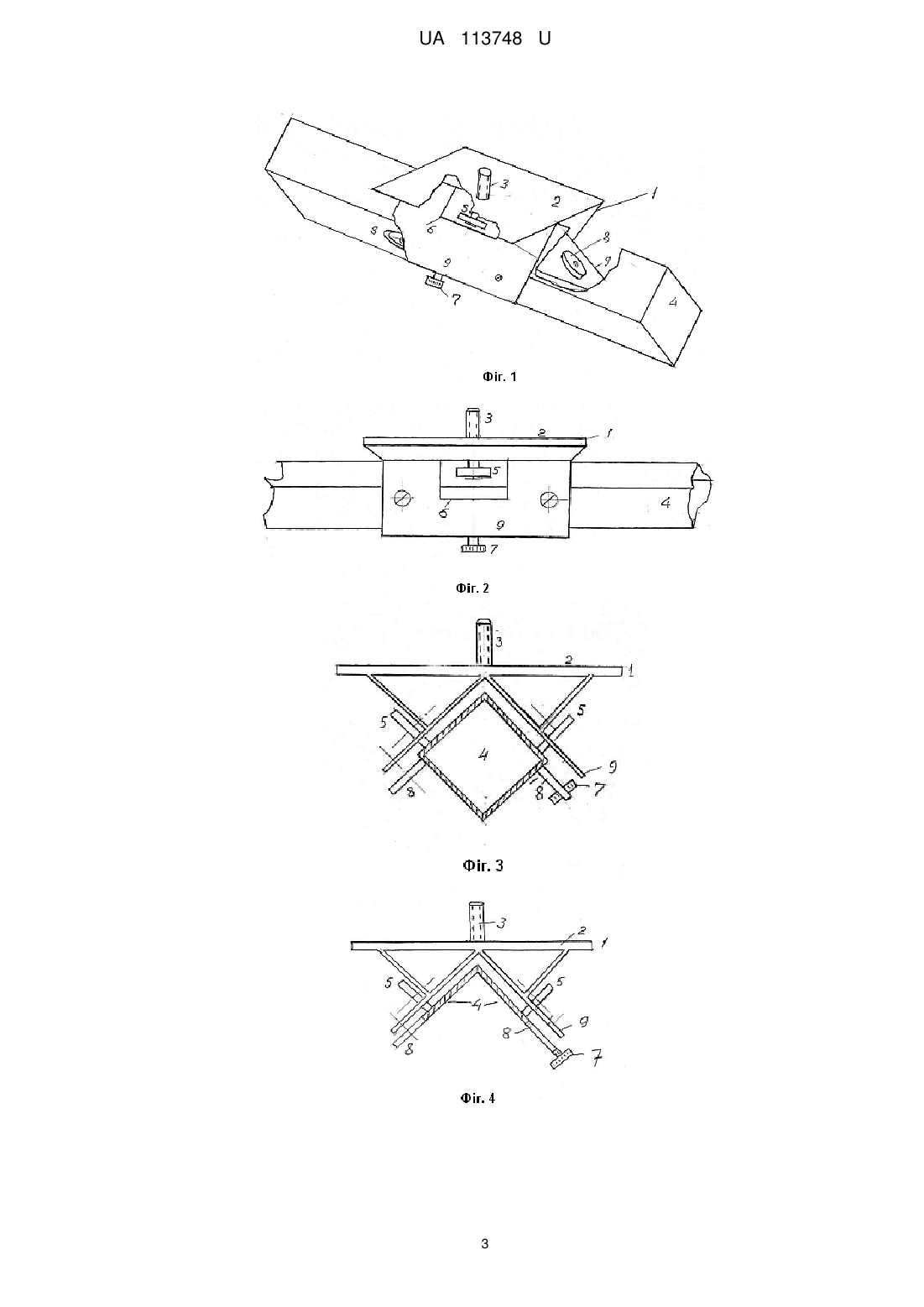
Реферат: UA 113748 U UA 113748 U 5 10 15 20 25 30 35 40 45 50 55 Монорейкова система переміщення платформи як корисна модель належить до області машинобудування, а саме, монорейкового транспорту і стосується переміщення вантажу закріпленого на платформі. Відома система лінійного переміщення вантажу та обладнання, яка складається з рейкової опори на основі квадратної труби та візка, оснащеного роликами [1]. Рейкова опора на основі квадратної труби встановлена ромбоподібно, під кутом 45° до горизонту площин труби. Ролики, які забезпечують кочення по трубі розташовані під кутом 90° один до одного на протилежних ребрах рейки. По три ролики для кожного ребра так, що ролики щільно стискають "своє" ребро рейки з обох боків. Недоліком цього пристрою є те, що він не забезпечує точність пересування візка через наявність люфтів, що викликає нестабільність переміщення візка, яка у свою чергу відбивається на точності закріпленого на платформі візка обладнання. Найбільш близьким технічним рішенням є посилена система лінійного переміщення вантажу та обладнання, яка складається теж з рейкової опори на основі квадратної труби та оснащеного роликами [2]. Рейковою опорою є квадратна труба, встановлена на ребро під кутом 45° до горизонту площин труби, як знизу, так і зверху платформи візка встановлено щонайменше чотири ролики переміщення возика платформи з вантажем або без нього. Ролики розташовані під кутом 90° один до одного на протилежних ребрах рейки, по чотири та більше для кожного ребра. Однак збільшення кількості роликів не забезпечує повною мірою точність візка, недостатньо усуває люфти, цим самим не гарантує точність встановленого і закріпленого на платформі візка обладнання, що негативно відбивається на результатах роботи обладнання. В основу монорейкової системи переміщення платформи поставлена задача забезпечити плавність та точність пересування візка з платформою, можливість закріплення їх у визначеному положенні; усунути можливість випадкових переміщень при будь-якому положенні системи, хитань та люфтів, що дасть можливість проводити обладнанням закріпленим на платформі візка різні роботи, без можливих його переміщень, коливань внаслідок зміни положення системи відносно до горизонту. У порівнянні з прототипом монорейкова система переміщення платформи має інше розміщення роликів, котрі охоплюють рейкову опору з усіх сторін, що забезпечує не тільки відсутність люфтів, але й можливість роботи обладнання розміщеного та закріпленим на платформі візка у різних положеннях відносно до горизонту при незмінності переміщень. З кожної із сторін розташовано по три ролики, бо площина, оперта на трьох точках, є найбільш стабільною не має хитань та люфтів. Завдяки чому ліквідовано будь-які неточності настройки, чим забезпечено гарантовану надійність та точність системи переміщення візка в процесі експлуатації. Крім цього, візок оснащений аретиром, що дає можливість регулювати швидкість його переміщення або закріпити каретку возика у визначеному положенні. Як рейкова опора може бити застосована не тільки квадратна труба, встановлена на ребро під кутом 45° до горизонту, але й профіль іншого перерізу, наприклад рівносторонній (рівнополичний) кутник з величиною товщини стінки рівною або більшою ширини ролика, який пересувають по стінці. Застосування профілю іншого перерізу обмежується виключно вимогою можливості пересування по ньому роликів. Зазначені відмінності від прототипу забезпечують монорейковій системі переміщення платформи, що заявлено, можливість обладнанням закріпленим на платформі візка виконувати різні роботи, без можливих його випадкових переміщень, коливань внаслідок зміни положення системи в горизонтальному, вертикальному, проміжному положеннях, що значно збільшує надійність та розширює діапазон застосування монорейкової системи переміщення платформи. На фіг. 1 представлено загальний вигляд монорейкової системи переміщення платформи в аксонометрії. На фіг. 2 вигляд монорейкової системи переміщення платформи збоку. На фіг. 3 вигляд з квадратною трубою, встановленою на ребро під кутом 45° до горизонту. На фіг. 4 - з рейковою опорою у вигляді кутника. На фіг. 1 зображено візок переміщення 1, платформа 2 з гвинтом кріплення обладнання 3 рейкова опора 4, верхній ролик 5, вікно 6 ролика 5, аретир 7, нижній ролик 8, каретка 9. На фіг. 2 зображено монорейкову систему переміщення платформи 2 збоку, де возик 1 у складі платформи 2 та каретки 9, з гвинтом кріплення обладнання 3, рейкова опора 4, аретир 7. На фіг. 3 зображено каретку 9 візка 1 монорейкової системи переміщення платформи 2 у вигляді квадратної труби 4, встановленої на ребро під кутом 45° до горизонту, де гвинт кріплення обладнання 3, верхні ролики 5, аретир 7, нижні ролики 8. На фіг. 4 зображено каретку 9 візка 1 монорейкової системи переміщення платформи 2, рейкова опора 4 у вигляді рівностороннього (рівнополичного) кутника, де гвинт кріплення обладнання 3, верхні ролики 5, аретир 7, нижні ролики 8. 1 UA 113748 U 5 10 15 20 25 30 Монорейкова система переміщення платформи працює наступним чином: Накручуючи на гвинт 3 платформи 2 обладнання закріплюють його нерухомо на візку 1. Дальше механічно вручну або за допомогою приводу переміщають в задане положення каретку 9 візка 1, яка обладнана роликами 5 по одному з кожної сторони по верхній грані рейкової опори 4 та двома роликами 8 з кожної сторони по нижній грані рейкової опори 4, яка виконує роль скеровуючої. Наявність вікна 6 у каретці 9 забезпечує безпосередній контакт ковзання ролика 5 по верхній грані рейкової опори 4, причому ролик 5 та ролики 8 на кожній стороні розташовані під кутом 90° один до одного, таким чином охоплюють рейкову опору 4 з двох сторін, чим запобігають можливості випадання візка 1 при розміщення системи під кутом до горизонту, вертикально чи у перевернутому положенні. Крім цього, ролик 5 разом з двома роликами 8 утворюють площину трьох точок опори на грані рейкової опори 4. Віддалі між роликами 5 та 8 є одинакові, а в площині дотику до граней рейкової опори 4 це - рівносторонній трикутник. Таке розташування роликів 5 та 8 відносно один до одного забезпечує відсутність хитань та люфтів, що дає точність положення обладнання закріпленого на платформі 2 та гвинті 3. За допомогою п'ятки аретира 6, який нерухомо закріплений на каретці 9 візка 1, задають швидкість пересування візка 1 по рейковій опорі 4, притискуючи або віддаляючи п'ятку аретира 6 від відповідної площини рейкової опори 4. При цьому завдяки тому, що аретир 6 змонтований нерухомо на каретці 9 візка 1, він дозволяє як регулювати швидкість переміщення візка 1 з обладнанням, а також, при потребі, його нерухому фіксацію в заданому положенні на опорі 4. Техніко-економічний ефект від використання монорейкової системи переміщення платформи полягає у тому, що забезпечує точність, надійність переміщення обладнанням, можливість регулювання швидкості переміщення або нерухому фіксацію в заданому положенні. Застосування специфічного розміщення трьох роликів з кожної сторони забезпечує довговічність точності використання усієї системи. Дозволяє працювати закріпленому обладнанню у горизонтальному, вертикальному, під кутом до горизонту в перевернутому положеннях, що забезпечує універсальність застосування монорейкової системи переміщення платформи з вантажем або без нього. Джерела інформації: 1. Патент України 83592; 2. Патент України 101369. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 1. Монорейкова система переміщення платформи, що сконструйована з рейкової опори, встановленої так, що її площини утворюють кут 45° з площиною горизонту, візка кріплення обладнання та його переміщення, трьох роликів кочення, змонтованих з кожної сторони рейкової опори під кутом 90° один до одного на протилежних ребрах рейки, яка відрізняється тим, що з кожної сторони розташовано ролики, які в площині дотику до граней рейкової опори утворюють рівносторонній трикутник. 2. Монорейкова система переміщення платформи за п. 1, яка відрізняється тим, що верхній ролик розміщений у вікні каретки візка. 3. Монорейкова система переміщення платформи за п. 1 або 2, яка відрізняється тим, що обладнана аретиром з можливістю регулювати положення розташування візка із змонтованим обладнанням та швидкість його переміщення. 4. Монорейкова система переміщення платформи за будь-яким з пп. 1-3, яка відрізняється тим, що як рейкову опору застосовують рівносторонній (рівнополичний) кутник з величиною товщини стінки рівною або більшою ширини ролика. 2 UA 113748 U 3 UA 113748 U Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B61B 13/04
Мітки: монорейкова, переміщення, платформи, система
Код посилання
<a href="https://ua.patents.su/6-113748-monorejjkova-sistema-peremishhennya-platformi.html" target="_blank" rel="follow" title="База патентів України">Монорейкова система переміщення платформи</a>
Система лінійного переміщення вантажу та обладнання
Номер патенту: 83592
Опубліковано: 25.09.2013
Автори: Кузьмин Владіслав Анатольєвіч, Кузьмина Надія Михайлівна
МПК: B61B 13/00
Мітки: система, обладнання, переміщення, вантажу, лінійного
Формула / Реферат:
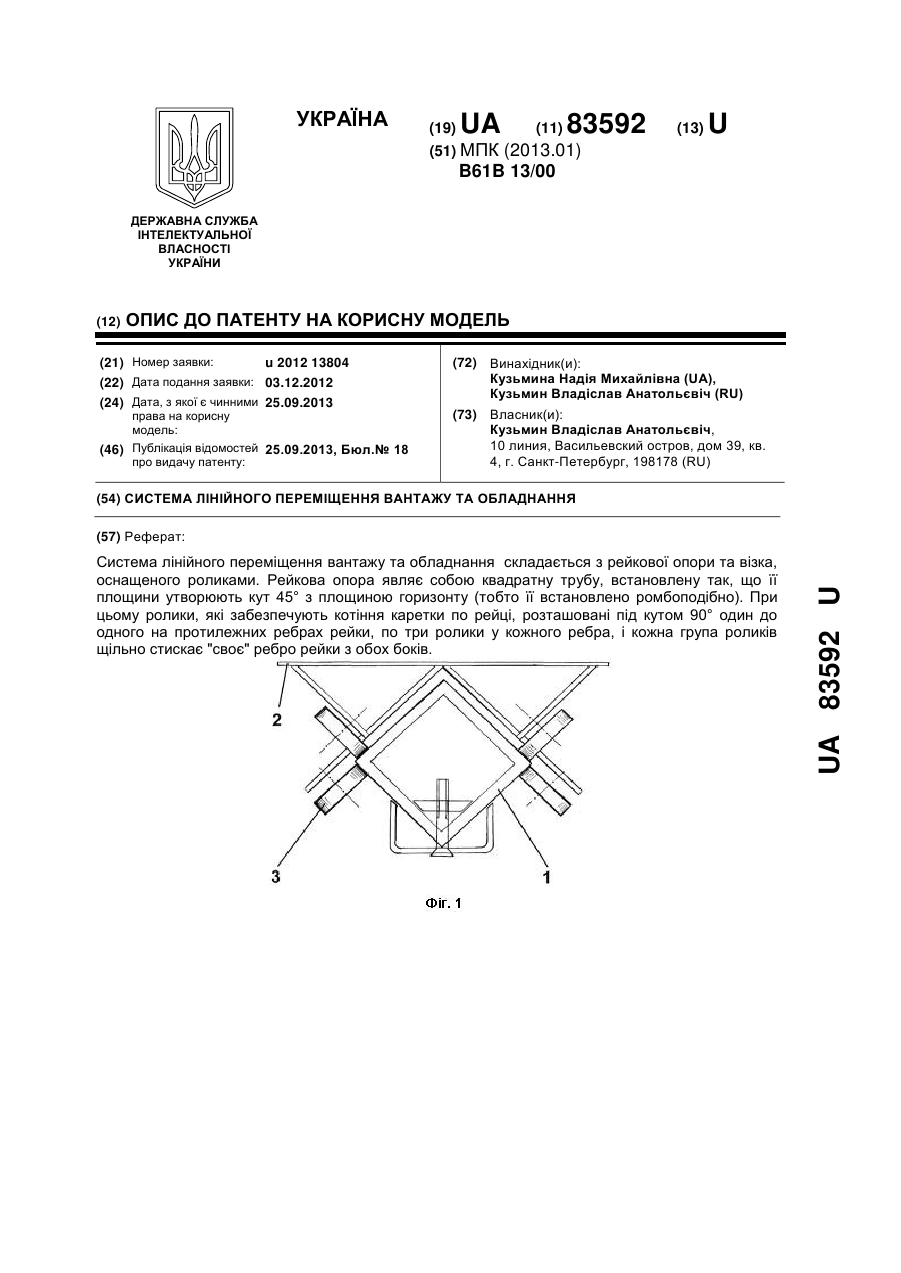
Система лінійного переміщення вантажу та обладнання, що складається з рейкової опори та візка, оснащеного роликами, яка відрізняється тим, що рейкова опора являє собою квадратну трубу, встановлену так, що її площини утворюють кут 45° з площиною горизонту (тобто її встановлено ромбоподібно), при цьому ролики, які забезпечують котіння каретки по рейці, розташовані під кутом 90° один до одного на протилежних ребрах рейки, по три ролики у...
Посилена система лінійного переміщення вантажу та обладнання
Номер патенту: 101369
Опубліковано: 10.09.2015
Автор: Кузьмина Надія Михайлівна
МПК: B61B 13/04
Мітки: переміщення, вантажу, посилена, обладнання, лінійного, система
Формула / Реферат:
Посилена система лінійного переміщення вантажу та обладнання, що містить рейкову опору та візок оснащений роликами, яка відрізняється тим, що рейкова опора являє собою квадратну трубу, яку встановлено на ребро, тобто ромбоподібно, як знизу, так і зверху платформи для переміщення вантажів на каретці, при цьому ролики забезпечують котіння каретки по рейці, розташовані під кутом 90° один до одного на протилежних ребрах рейки, по чотири та більш...
Механізм переміщення платформи з кузовом коксовозного вагона
Номер патенту: 98089
Опубліковано: 10.04.2012
Автори: Рудика Віктор Іванович, Зінгерман Юрій Юхимович, Бутко Євген Федорович
МПК: C10B 39/12, C10B 39/02
Мітки: кузовом, механізм, коксовозного, платформи, переміщення, вагона
Формула / Реферат:
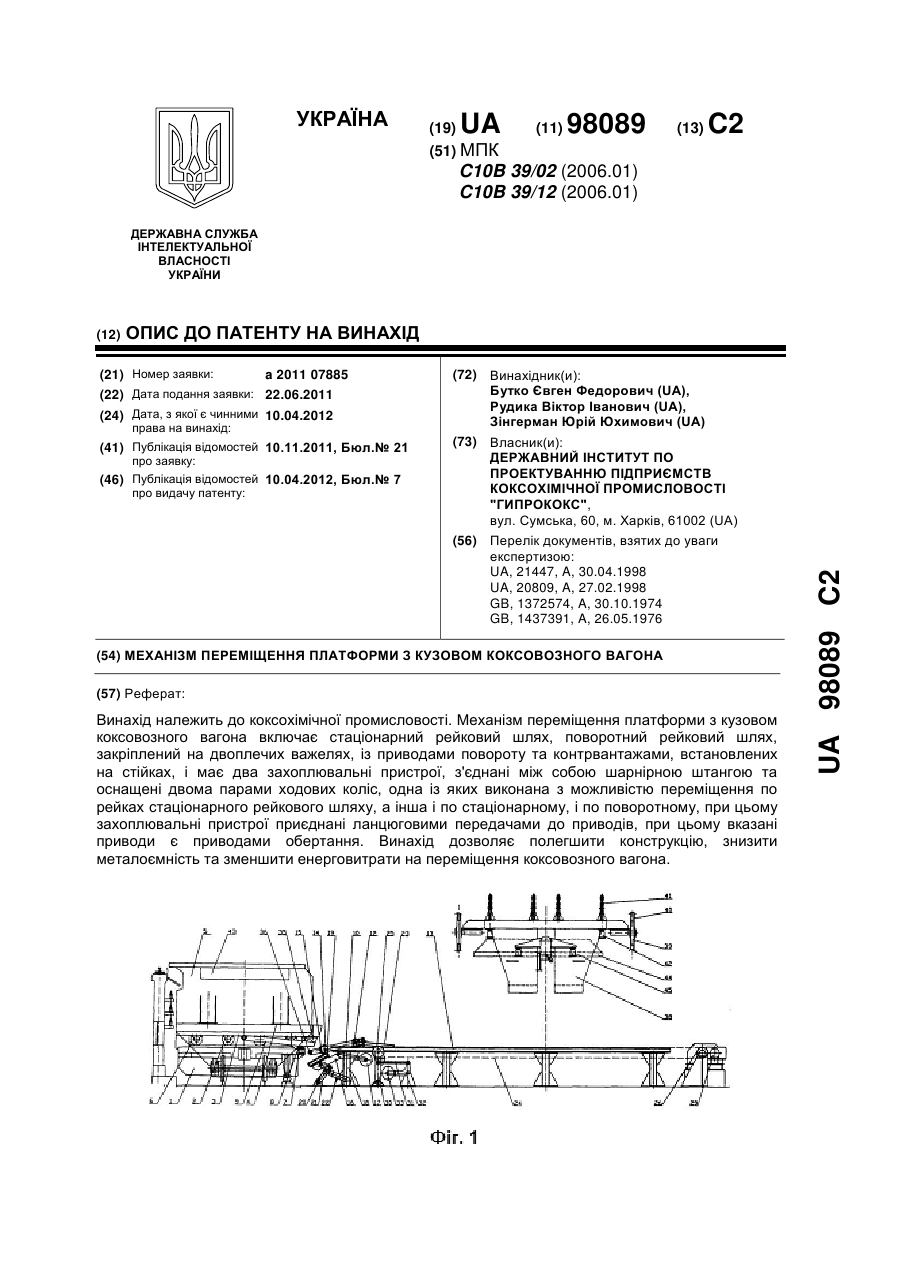
Механізм переміщення платформи з кузовом коксовозного вагона, що включає захоплювальний пристрій, поєднаний із приводом, та стаціонарний рейковий шлях, який відрізняється тим, що механізм додатково обладнаний поворотним рейковим шляхом, закріпленим на двоплечих важелях, із приводами повороту та контрвантажами, встановлених на стійках, і має додатковий захоплювальний пристрій, причому два захоплювальні пристрої, з'єднані між собою шарнірною...
Монорейкова канатна дорога для похилих виробок

Номер патенту: 43937
Опубліковано: 10.09.2009
Автор: Денищенко Олександр Валерійович
МПК: E21F 13/00
Мітки: монорейкова, похилих, дорога, канатна, виробок
Формула / Реферат:
Монорейкова канатна дорога для похилих виробок, що містить монорейкову колію, на якій встановлений буксирний візок зі зчепленим з ним составом вантажних і пасажирських візків, що обладнані барабаном із запасом тягового каната, привідну і кінцеву станції, напрямні ролики, яка відрізняється тим, що вона містить додатковий підвісний буксирний візок із з'єднаним з ним составом вантажних і пасажирських вагонеток, що приєднані до зворотної гілки...
Пристрій для переміщення платформи коксовозного вагону
Номер патенту: 21447
Опубліковано: 02.12.1997
Автори: Ткаченко Олександр Григорович, Кононенко Василь Семенович, Михайленко Віктор Якович, Давиденко Володимир Михайлович, Тарасов Станіслав Петрович, Мінасов Олександр Миколайович, Брантов Анатолій Олександрович
МПК: C10B 39/12
Мітки: вагону, коксовозного, платформи, переміщення, пристрій
Формула / Реферат:
Устройство для перемещения платформы коксовозного вагона, содержащее штангу с приводом ее передвижения, выполненную в виде шарнирно соединенных между собой передней и концевой частей, стойку с качающейся тягой, опорные ролики, опорные катки, закрепленные посредством опорной стойки на передней части штанги, захватный механизм, включающий захват с зубом, шарнирно закрепленный на передней части штанги, взаимодействующим с роликами проушины...
Попередній патент: Система з множиною входів та множиною виходів (мімо) підвищеної завадозахищеності
Наступний патент: Система з множиною входів та множиною виходів (мімо) з шумоподібними сигналами
Випадковий патент: Формувач періодичної послідовності триімпульсних кодових серій з заданою кількістю імпульсів, програмованою тривалістю паузи між імпульсами у серії і між серіями