Спосіб визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері
Номер патенту: 83049
Опубліковано: 27.08.2013
Автори: Моцар Петро Іванович, Петров Роман Миколайович, Ратніков Ігор Миколайович

Формула / Реферат
Спосіб визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері, який полягає в тому, що за допомогою апаратних і програмних засобів авіаційного тренажера здійснюють коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата з використанням методу симплекс-планування, при якому нормують змінні значення аеродинамічних коефіцієнтів сил і моментів просторового руху літального апарата, зареєстрованих бортовим пристроєм реєстрації польотної інформації, вибирають початковий симплекс і здійснюють, з використанням рівнянь динаміки руху літального апарата, побудову різниці між параметрами його реального просторового положення і аналогічними параметрами, відтвореними апаратними і програмними засобами авіаційного тренажера, визначають оптимальні оцінні значення чергового симплексу з мінімізацією розбіжностей між їх необхідними і розрахунковими значеннями до заданої величини, формують матрицю коректуючих поправок до апроксимаційної моделі "середнього" літального апарата на авіаційному тренажері і коректують математичну модель динаміки польоту літального апарата на авіаційному тренажері.
Текст
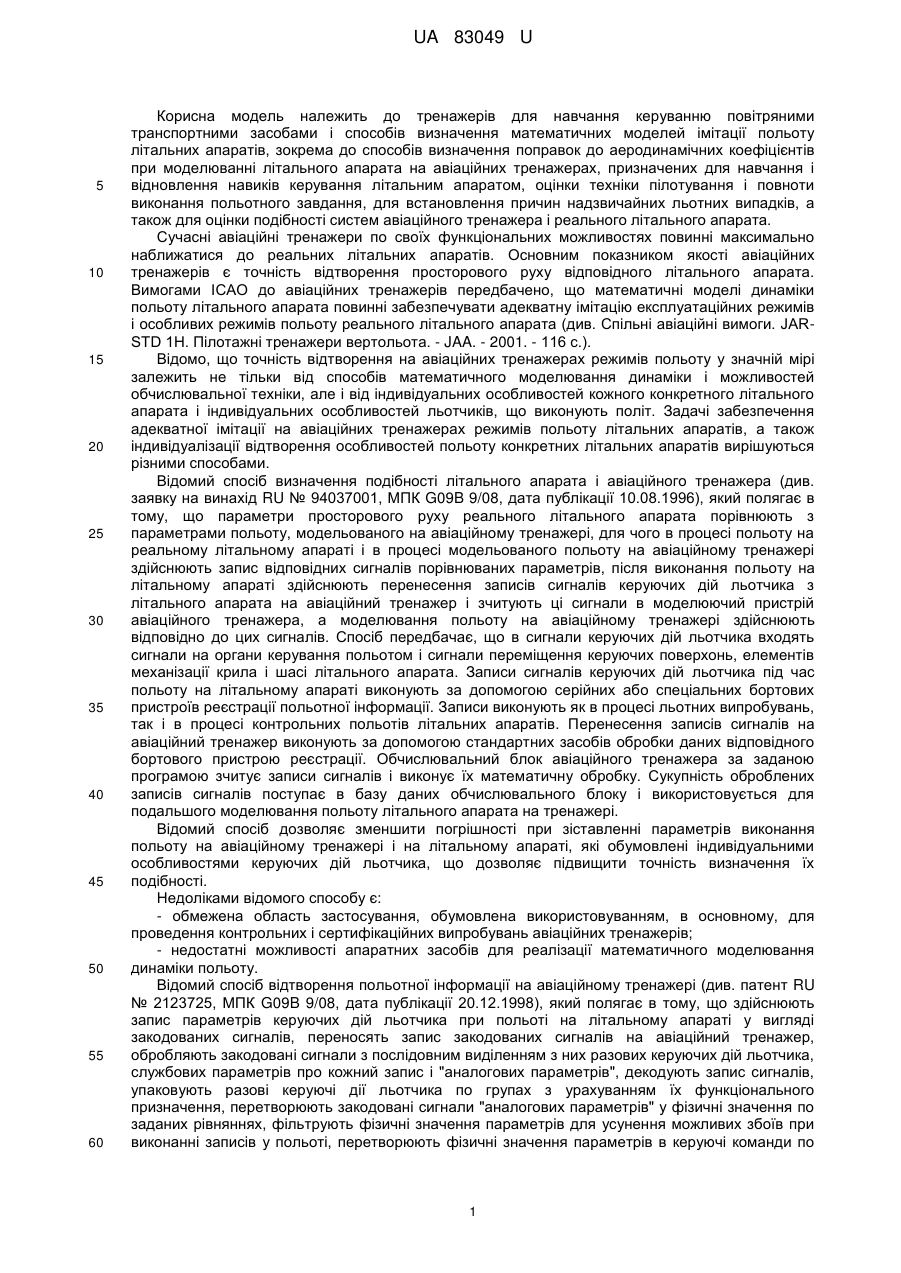
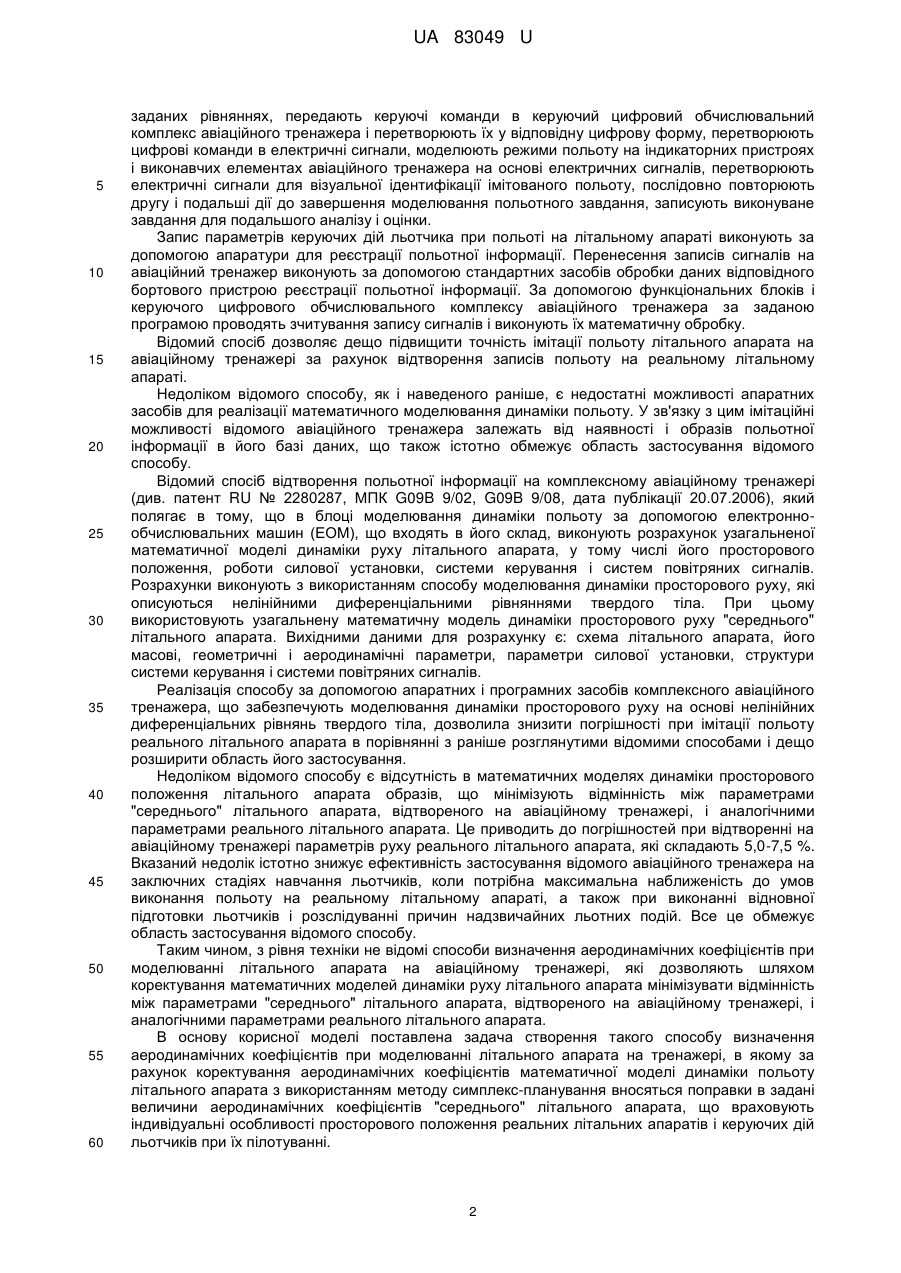
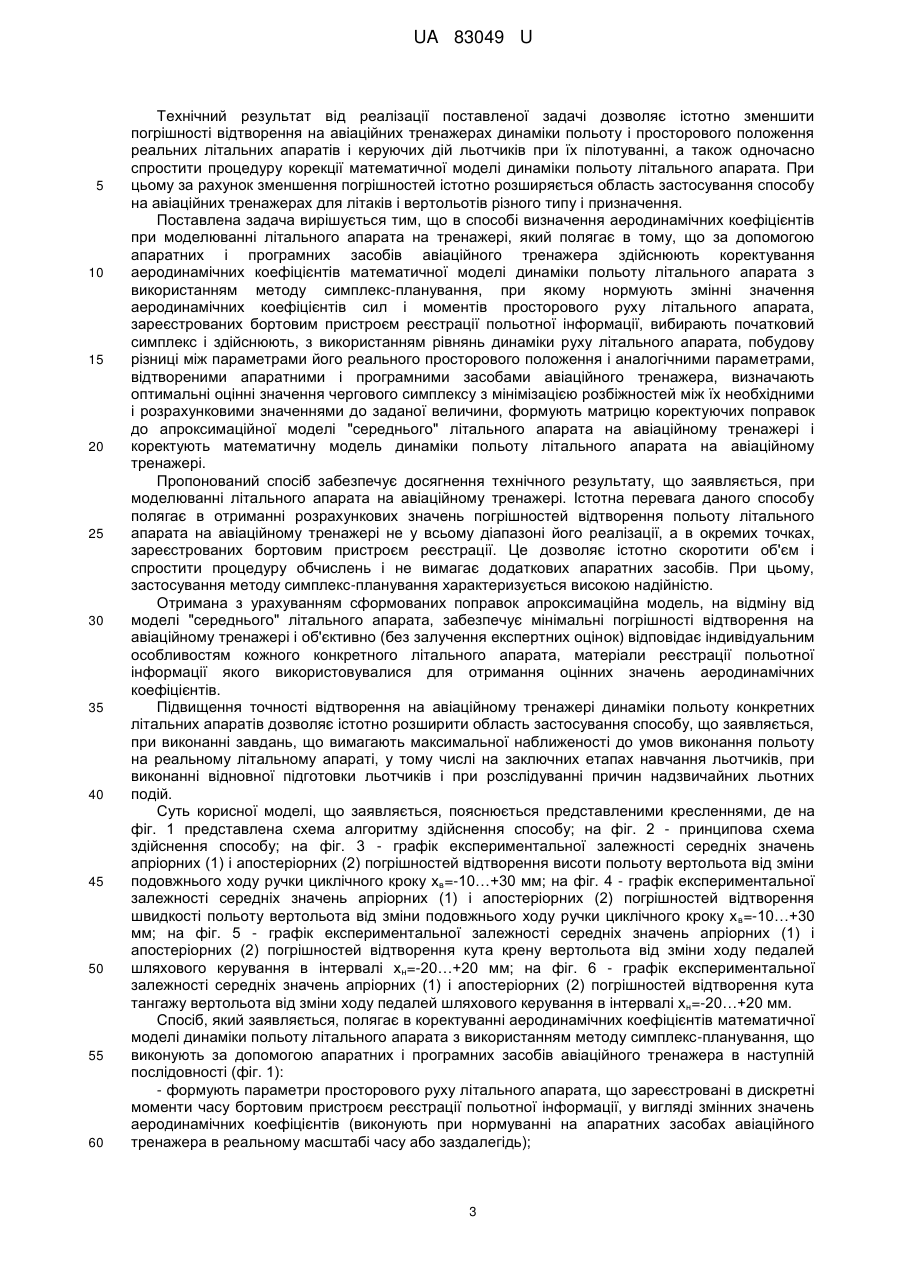
Реферат: Спосіб визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері полягає в тому, що за допомогою апаратних і програмних засобів авіаційного тренажера здійснюють коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата з використанням методу симплекс-планування. При цьому нормують змінні значення аеродинамічних коефіцієнтів сил і моментів просторового руху літального апарата, зареєстрованих бортовим пристроєм реєстрації польотної інформації, вибирають початковий симплекс і здійснюють, з використанням рівнянь динаміки руху літального апарату, побудову різниці між параметрами його реального просторового положення і аналогічними параметрами, відтвореними апаратними і програмними засобами авіаційного тренажера. Далі визначають оптимальні оцінні значення чергового симплексу з мінімізацією розбіжностей між їх необхідними і розрахунковими значеннями до заданої величини, формують матрицю коректуючих поправок до апроксимаційної моделі "середнього" літального апарата на авіаційному тренажері і коректують математичну модель динаміки польоту літального апарата на авіаційному тренажері. UA 83049 U (12) UA 83049 U UA 83049 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до тренажерів для навчання керуванню повітряними транспортними засобами і способів визначення математичних моделей імітації польоту літальних апаратів, зокрема до способів визначення поправок до аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційних тренажерах, призначених для навчання і відновлення навиків керування літальним апаратом, оцінки техніки пілотування і повноти виконання польотного завдання, для встановлення причин надзвичайних льотних випадків, а також для оцінки подібності систем авіаційного тренажера і реального літального апарата. Сучасні авіаційні тренажери по своїх функціональних можливостях повинні максимально наближатися до реальних літальних апаратів. Основним показником якості авіаційних тренажерів є точність відтворення просторового руху відповідного літального апарата. Вимогами ICAO до авіаційних тренажерів передбачено, що математичні моделі динаміки польоту літального апарата повинні забезпечувати адекватну імітацію експлуатаційних режимів і особливих режимів польоту реального літального апарата (див. Спільні авіаційні вимоги. JARSTD 1Н. Пілотажні тренажери вертольота. - JAA. - 2001. - 116 с.). Відомо, що точність відтворення на авіаційних тренажерах режимів польоту у значній мірі залежить не тільки від способів математичного моделювання динаміки і можливостей обчислювальної техніки, але і від індивідуальних особливостей кожного конкретного літального апарата і індивідуальних особливостей льотчиків, що виконують політ. Задачі забезпечення адекватної імітації на авіаційних тренажерах режимів польоту літальних апаратів, а також індивідуалізації відтворення особливостей польоту конкретних літальних апаратів вирішуються різними способами. Відомий спосіб визначення подібності літального апарата і авіаційного тренажера (див. заявку на винахід RU № 94037001, МПК G09B 9/08, дата публікації 10.08.1996), який полягає в тому, що параметри просторового руху реального літального апарата порівнюють з параметрами польоту, модельованого на авіаційному тренажері, для чого в процесі польоту на реальному літальному апараті і в процесі модельованого польоту на авіаційному тренажері здійснюють запис відповідних сигналів порівнюваних параметрів, після виконання польоту на літальному апараті здійснюють перенесення записів сигналів керуючих дій льотчика з літального апарата на авіаційний тренажер і зчитують ці сигнали в моделюючий пристрій авіаційного тренажера, а моделювання польоту на авіаційному тренажері здійснюють відповідно до цих сигналів. Спосіб передбачає, що в сигнали керуючих дій льотчика входять сигнали на органи керування польотом і сигнали переміщення керуючих поверхонь, елементів механізації крила і шасі літального апарата. Записи сигналів керуючих дій льотчика під час польоту на літальному апараті виконують за допомогою серійних або спеціальних бортових пристроїв реєстрації польотної інформації. Записи виконують як в процесі льотних випробувань, так і в процесі контрольних польотів літальних апаратів. Перенесення записів сигналів на авіаційний тренажер виконують за допомогою стандартних засобів обробки даних відповідного бортового пристрою реєстрації. Обчислювальний блок авіаційного тренажера за заданою програмою зчитує записи сигналів і виконує їх математичну обробку. Сукупність оброблених записів сигналів поступає в базу даних обчислювального блоку і використовується для подальшого моделювання польоту літального апарата на тренажері. Відомий спосіб дозволяє зменшити погрішності при зіставленні параметрів виконання польоту на авіаційному тренажері і на літальному апараті, які обумовлені індивідуальними особливостями керуючих дій льотчика, що дозволяє підвищити точність визначення їх подібності. Недоліками відомого способу є: - обмежена область застосування, обумовлена використовуванням, в основному, для проведення контрольних і сертифікаційних випробувань авіаційних тренажерів; - недостатні можливості апаратних засобів для реалізації математичного моделювання динаміки польоту. Відомий спосіб відтворення польотної інформації на авіаційному тренажері (див. патент RU № 2123725, МПК G09B 9/08, дата публікації 20.12.1998), який полягає в тому, що здійснюють запис параметрів керуючих дій льотчика при польоті на літальному апараті у вигляді закодованих сигналів, переносять запис закодованих сигналів на авіаційний тренажер, обробляють закодовані сигнали з послідовним виділенням з них разових керуючих дій льотчика, службових параметрів про кожний запис і "аналогових параметрів", декодують запис сигналів, упаковують разові керуючі дії льотчика по групах з урахуванням їх функціонального призначення, перетворюють закодовані сигнали "аналогових параметрів" у фізичні значення по заданих рівняннях, фільтрують фізичні значення параметрів для усунення можливих збоїв при виконанні записів у польоті, перетворюють фізичні значення параметрів в керуючі команди по 1 UA 83049 U 5 10 15 20 25 30 35 40 45 50 55 60 заданих рівняннях, передають керуючі команди в керуючий цифровий обчислювальний комплекс авіаційного тренажера і перетворюють їх у відповідну цифрову форму, перетворюють цифрові команди в електричні сигнали, моделюють режими польоту на індикаторних пристроях і виконавчих елементах авіаційного тренажера на основі електричних сигналів, перетворюють електричні сигнали для візуальної ідентифікації імітованого польоту, послідовно повторюють другу і подальші дії до завершення моделювання польотного завдання, записують виконуване завдання для подальшого аналізу і оцінки. Запис параметрів керуючих дій льотчика при польоті на літальному апараті виконують за допомогою апаратури для реєстрації польотної інформації. Перенесення записів сигналів на авіаційний тренажер виконують за допомогою стандартних засобів обробки даних відповідного бортового пристрою реєстрації польотної інформації. За допомогою функціональних блоків і керуючого цифрового обчислювального комплексу авіаційного тренажера за заданою програмою проводять зчитування запису сигналів і виконують їх математичну обробку. Відомий спосіб дозволяє дещо підвищити точність імітації польоту літального апарата на авіаційному тренажері за рахунок відтворення записів польоту на реальному літальному апараті. Недоліком відомого способу, як і наведеного раніше, є недостатні можливості апаратних засобів для реалізації математичного моделювання динаміки польоту. У зв'язку з цим імітаційні можливості відомого авіаційного тренажера залежать від наявності і образів польотної інформації в його базі даних, що також істотно обмежує область застосування відомого способу. Відомий спосіб відтворення польотної інформації на комплексному авіаційному тренажері (див. патент RU № 2280287, МПК G09B 9/02, G09B 9/08, дата публікації 20.07.2006), який полягає в тому, що в блоці моделювання динаміки польоту за допомогою електроннообчислювальних машин (ЕОМ), що входять в його склад, виконують розрахунок узагальненої математичної моделі динаміки руху літального апарата, у тому числі його просторового положення, роботи силової установки, системи керування і систем повітряних сигналів. Розрахунки виконують з використанням способу моделювання динаміки просторового руху, які описуються нелінійними диференціальними рівняннями твердого тіла. При цьому використовують узагальнену математичну модель динаміки просторового руху "середнього" літального апарата. Вихідними даними для розрахунку є: схема літального апарата, його масові, геометричні і аеродинамічні параметри, параметри силової установки, структури системи керування і системи повітряних сигналів. Реалізація способу за допомогою апаратних і програмних засобів комплексного авіаційного тренажера, що забезпечують моделювання динаміки просторового руху на основі нелінійних диференціальних рівнянь твердого тіла, дозволила знизити погрішності при імітації польоту реального літального апарата в порівнянні з раніше розглянутими відомими способами і дещо розширити область його застосування. Недоліком відомого способу є відсутність в математичних моделях динаміки просторового положення літального апарата образів, що мінімізують відмінність між параметрами "середнього" літального апарата, відтвореного на авіаційному тренажері, і аналогічними параметрами реального літального апарата. Це приводить до погрішностей при відтворенні на авіаційному тренажері параметрів руху реального літального апарата, які складають 5,0-7,5 %. Вказаний недолік істотно знижує ефективність застосування відомого авіаційного тренажера на заключних стадіях навчання льотчиків, коли потрібна максимальна наближеність до умов виконання польоту на реальному літальному апараті, а також при виконанні відновної підготовки льотчиків і розслідуванні причин надзвичайних льотних подій. Все це обмежує область застосування відомого способу. Таким чином, з рівня техніки не відомі способи визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері, які дозволяють шляхом коректування математичних моделей динаміки руху літального апарата мінімізувати відмінність між параметрами "середнього" літального апарата, відтвореного на авіаційному тренажері, і аналогічними параметрами реального літального апарата. В основу корисної моделі поставлена задача створення такого способу визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на тренажері, в якому за рахунок коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата з використанням методу симплекс-планування вносяться поправки в задані величини аеродинамічних коефіцієнтів "середнього" літального апарата, що враховують індивідуальні особливості просторового положення реальних літальних апаратів і керуючих дій льотчиків при їх пілотуванні. 2 UA 83049 U 5 10 15 20 25 30 35 40 45 50 55 60 Технічний результат від реалізації поставленої задачі дозволяє істотно зменшити погрішності відтворення на авіаційних тренажерах динаміки польоту і просторового положення реальних літальних апаратів і керуючих дій льотчиків при їх пілотуванні, а також одночасно спростити процедуру корекції математичної моделі динаміки польоту літального апарата. При цьому за рахунок зменшення погрішностей істотно розширяється область застосування способу на авіаційних тренажерах для літаків і вертольотів різного типу і призначення. Поставлена задача вирішується тим, що в способі визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на тренажері, який полягає в тому, що за допомогою апаратних і програмних засобів авіаційного тренажера здійснюють коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата з використанням методу симплекс-планування, при якому нормують змінні значення аеродинамічних коефіцієнтів сил і моментів просторового руху літального апарата, зареєстрованих бортовим пристроєм реєстрації польотної інформації, вибирають початковий симплекс і здійснюють, з використанням рівнянь динаміки руху літального апарата, побудову різниці між параметрами його реального просторового положення і аналогічними параметрами, відтвореними апаратними і програмними засобами авіаційного тренажера, визначають оптимальні оцінні значення чергового симплексу з мінімізацією розбіжностей між їх необхідними і розрахунковими значеннями до заданої величини, формують матрицю коректуючих поправок до апроксимаційної моделі "середнього" літального апарата на авіаційному тренажері і коректують математичну модель динаміки польоту літального апарата на авіаційному тренажері. Пропонований спосіб забезпечує досягнення технічного результату, що заявляється, при моделюванні літального апарата на авіаційному тренажері. Істотна перевага даного способу полягає в отриманні розрахункових значень погрішностей відтворення польоту літального апарата на авіаційному тренажері не у всьому діапазоні його реалізації, а в окремих точках, зареєстрованих бортовим пристроєм реєстрації. Це дозволяє істотно скоротити об'єм і спростити процедуру обчислень і не вимагає додаткових апаратних засобів. При цьому, застосування методу симплекс-планування характеризується високою надійністю. Отримана з урахуванням сформованих поправок апроксимаційна модель, на відміну від моделі "середнього" літального апарата, забезпечує мінімальні погрішності відтворення на авіаційному тренажері і об'єктивно (без залучення експертних оцінок) відповідає індивідуальним особливостям кожного конкретного літального апарата, матеріали реєстрації польотної інформації якого використовувалися для отримання оцінних значень аеродинамічних коефіцієнтів. Підвищення точності відтворення на авіаційному тренажері динаміки польоту конкретних літальних апаратів дозволяє істотно розширити область застосування способу, що заявляється, при виконанні завдань, що вимагають максимальної наближеності до умов виконання польоту на реальному літальному апараті, у тому числі на заключних етапах навчання льотчиків, при виконанні відновної підготовки льотчиків і при розслідуванні причин надзвичайних льотних подій. Суть корисної моделі, що заявляється, пояснюється представленими кресленнями, де на фіг. 1 представлена схема алгоритму здійснення способу; на фіг. 2 - принципова схема здійснення способу; на фіг. 3 - графік експериментальної залежності середніх значень апріорних (1) і апостеріорних (2) погрішностей відтворення висоти польоту вертольота від зміни подовжнього ходу ручки циклічного кроку xв=-10…+30 мм; на фіг. 4 - графік експериментальної залежності середніх значень апріорних (1) і апостеріорних (2) погрішностей відтворення швидкості польоту вертольота від зміни подовжнього ходу ручки циклічного кроку x в=-10…+30 мм; на фіг. 5 - графік експериментальної залежності середніх значень апріорних (1) і апостеріорних (2) погрішностей відтворення кута крену вертольота від зміни ходу педалей шляхового керування в інтервалі x н=-20…+20 мм; на фіг. 6 - графік експериментальної залежності середніх значень апріорних (1) і апостеріорних (2) погрішностей відтворення кута тангажу вертольота від зміни ходу педалей шляхового керування в інтервалі x н=-20…+20 мм. Спосіб, який заявляється, полягає в коректуванні аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата з використанням методу симплекс-планування, що виконують за допомогою апаратних і програмних засобів авіаційного тренажера в наступній послідовності (фіг. 1): - формують параметри просторового руху літального апарата, що зареєстровані в дискретні моменти часу бортовим пристроєм реєстрації польотної інформації, у вигляді змінних значень аеродинамічних коефіцієнтів (виконують при нормуванні на апаратних засобах авіаційного тренажера в реальному масштабі часу або заздалегідь); 3 UA 83049 U 5 10 15 - нормують змінні значення аеродинамічних коефіцієнтів параметрів просторового руху літального апарата, що зареєстровані в дискретні моменти часу бортовим пристроєм реєстрації польотної інформації; - вибирають початковий симплекс і здійснюють з використанням рівнянь динаміки руху літального апарата побудову різниці між параметрами його реального просторового положення і аналогічними параметрами, відтвореними апаратними пристроями авіаційного тренажера; - визначають оптимальні оцінні значення чергового симплексу з мінімізацією розбіжностей між їх необхідними і розрахунковими значеннями до заданої величини; - формують матрицю коректуючих поправок до апроксимаційної моделі "середнього" літального апарата на авіаційному тренажері; - коректують математичну модель динаміки польоту літального апарата на авіаційному тренажері. Беручи до уваги, що основним показником якості будь-якого авіаційного тренажера є точність відтворення просторового руху літального апарата, задача за визначенням аеродинамічних коефіцієнтів може бути представлена в образі задачі векторної оптимізації. При ідентичних керуючих діях x x , x , х , Т на реальний літальний апарат і на його модель на в к н ош тренажері точність відтворення на тренажері параметрів руху літального апарата може бути охарактеризована вектором погрішностей: ˆ * , де: 20 25 30 (1) Т ˆ ˆ ˆ ˆ ˆ ˆ ˆ V,Н, ,,x,z вектор параметрів просторового руху літального апарата, отриманий з виходу бортового пристрою реєстрації в результаті оптимальної обробки польотної інформації; Т вектор параметрів просторового руху моделі, відтвореної на * V *,Н*, *,*,* ,* x z авіаційному тренажері. В математичній моделі авіаційного тренажера залежність складових вектора * (K) просторового положення імітаційної моделі від складових K вектора аеродинамічних коефіцієнтів носить суперечливий характер, що дозволяє розглядати задачу визначення оптимальних значень вектора K як задачу векторної оптимізації. Стосовно літального апарата задача визначення оптимальних значень аеродинамічних коефіцієнтів сил і моментів може бути представлена в наступному вигляді. Нехай задана безліч можливих рішень K En задачі оптимізації, в яких визначені вектори K n n-мірного K i i1 евклідового простору. Якість рішення оцінюється по сукупності приватних суперечливих s , що визначений на множині критеріїв, що створюють s-мірний вектор K. k K k 1 Вектор приватних критеріїв обмежений допустимою областю М. Ця область залежить від обмежень A , що створюють вектор A A s , і за умови, що всі приватні критерії k k 1 k ненегативні і вимагають мінімізації, може бути представлена у вигляді . M | 0 k K A k , k 1 s , 35 ˆ визначити таке рішення K En , Т і обмеженнях М мінімізує вектор x xв, xк , хн,ош s при Вимагається при ˆ K arg min k K k 1 K En , зад зад зад зад Т . Mзад | 0 k K Aзад, k 1 s xзад xв , xк , хн , ош , k 40 45 яке заданих керуючих діях На етапі формування змінних значень аеродинамічних коефіцієнтів виконують інформаційне сполучення бортового пристрою реєстрації літального апарата з апаратними засобами авіаційного тренажера. Сполучення виконують методом оптимізації. Для цього з виходу бортового пристрою реєстрації керуючі параметри, що зареєстровані в дискретні моменти часу Т , подають на вхід однорозмірного фільтру Калмана. З t і створюють вектор x x , x , х , в к н ош 4 UA 83049 U ˆ x виходу фільтру оцінні значення керуючих параметрів, після узгодження частоти їх надходження з періодом оновлення інформації в авіаційному тренажері, використовують як такі, що задають дії для математичної моделі. Одночасно на вхід математичної моделі подаються 5 значення U параметрів, що характеризують дію на літальний апарат і його системи навколишнього середовища (швидкості і напрями вітру, температури повітря, атмосферного тиску і т.д.). Зареєстровані значення висоти H і швидкості V польоту літального апарата з виходу бортового пристрою реєстрації подають на вхід трьохрозмірного фільтру Калмана, а значення кутів крену , тангажа і швидкостей їх зміни (відповідно або ) - на вхід z x 10 15 20 алгоритму оптимального комплексування. В результаті фільтрації і комплексування формується ˆ ˆ ˆ ˆ ˆ ˆ вектор H, V, , , , оптимальних оцінних значень параметрів просторового руху реального x z літального апарата. Підготовку вихідних даних можна виконувати заздалегідь або при нормуванні на апаратних засобах авіаційного тренажера в реальному масштабі часу. На етапі нормування змінних значень аеродинамічних коефіцієнтів здійснюють перехід до простору нормованих змінних значень аеродинамічних коефіцієнтів K . Перехід виконують з використанням методу симплекс-планування для пошуку мінімуму функції (K ) , заданої на паралелепіпеді за наявності обмежень типу нерівностей K K En a K b , i 1 n , i i i ˆ ˆ , Ak 0, k 1 s . Пошук точки K K виконують для умови, при якій (K) (K ) і A k 0, k 1 s . , Для цього задають вихідну точку K , A (K ) 0, k 1 s і переходять від паралелепіпеда , H K k H до куба , виконавши нормування за допомогою заміни змінних: n K QK K E 0 K 1 i 1 n , , i K a . K i i (2) i b a i i ˆ Пошук мінімуму функції (K ) зводиться до пошуку точки, яка відповідає точці K при перетворенні (2), а точці K відповідає точка K . H 25 H Далі в алгоритмі використовують тільки нормовані значення змінних, тому для зручності розрахунку доцільно опустити штрих в позначенні нормованих змінних. На етапі вибору початкового симплексу реалізують метод коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата. Для цього проводять порівняння вектора ˆ ˆ ˆ ˆ ˆ H, V, ˆ,,x,z оптимальних оцінних значень параметрів просторового положення реального літального апарата і вектора * * * * * * V ,Н , , , x , z аналогічних параметрів, відтворених авіаційним тренажером під впливом заданих керуюючих параметрів 30 ˆ x і параметрів зовнішнього середовища U . Приймаємо як n мірний симплекс в евклідовому просторі многогранник з (n+1) вершиною. Симплекс буде регулярним, якщо многогранник є правильним. Побудуємо усередині куба регулярний симплекс, одна з вершин якого співпадає з точкою QK 35 . Координати векторів, які відповідають вершинам симплексу, зберігають в таблиці KH K Kij розміром (n 1) n . Кожний i й рядок таблиці відповідатиме i й вершині симплексу, а кожний j й стовпець j й компоненті i й вершині. Таким чином, в перший рядок таблиці заносять компоненти вектора K . Елементи таблиці визначаються виразами: H 1 1 n 1 , Kij K1j u nq 2 K j 1 j K1j u , 40 1 n 1 n 1 , nq 2 де q величина, що визначає розмір симплексу. Ця величина впливає на кількість ітерацій, необхідних для досягнення точки мінімуму, а вибір її значення в конкретній задачі визначається 5 UA 83049 U 5 10 15 апріорними відомостями про функцію, що мінімізується. Величина u визначає спрямованість симплексу усередині куба Q . Якщо K 0,5 , то u=1, в K ij протилежному випадку u 1. При побудові таблиці K K перевіряють умови, які ij задовольняють обмеженням для кожної вершини вихідного симплексу. Якщо яка-небудь вершина не задовольняє обмеженням, розмір вихідного симплексу зменшується удвічі і приведену процедуру побудови повторюють для нового вихідного симплексу. Після формування таблиці K K будують вектор, компонентами якого є значення ij функції (K ) для відповідних рядків таблиці (значення функції, що відповідає вершинам симплексу). Застосування методу коректування дозволяє винести за рамки розрахунку задачу пошуку глобального мінімуму універсальної згортки компромісів, оскільки в діючих авіаційних тренажерах значення аеродинамічних коефіцієнтів K , які забезпечують формування вектора * , з високим ступенем достовірності (в результаті використовування на авіаційному тренажері первинної апроксимаційної матриці коефіцієнтів K , отриманої з математичних моделей динаміки руху літальних апаратів, і подальшої її корекції методами експертної оцінки) апріорі гарантують знаходження скалярної згортки критеріїв в області глобального мінімуму. На етапі побудови чергового симплексу обчислюють оптимальні оцінні значення аеродинамічних коефіцієнтів K C , C , C ,m ,m ,m , при яких вектор (K) приймає мінімальне ˆ ˆ ˆ ˆ ˆ ˆ ˆ 20 25 t h s x y z значення. Для цього в таблиці K вибирають рядок, якому відповідає максимальна компонента вектора v . Припустимо, що цей рядок має номер L . Проводиться відкидання цієї вершини як якнайгіршої і побудова нового симплексу, який містить всі вершини і ще одну нову вершину, яка одержується відображенням відкиданої вершини щодо середнього значення (центру тяжкості) протилежної грані симплексу. Якщо нова вершина не задовольняє обмеженням, то використовують процедуру розподілу пополам відрізка, що з'єднує нову і стару вершини. Координати вершини, симетричній відкиданій вершині, щодо середини протилежної грані . u N K 2 KLj j n Якщо для якого-небудь j виконується KN 0 , то приймається KN 0 , а якщо KN 1, то j j j приймається KN 1. Для отриманої вершини симплексу визначають відповідне значення N j 30 35 40 45 функції (K ) . При цьому можливі два варіанти. В першому варіанті існує вершина симплексу, значення функції (K ) для якої перевершує значення для нової вершини. Це означає, що ситуація поліпшується, відбувається N наближення до мінімуму функції (K ) . Значення K N заноситься на місце L ого рядка таблиці, j а значення замість L ої компоненти вектора v . N В другому варіанті існує значення , яке перевершує значення (K ) в решті вершин. Це N означає, що в порівнянні з первинною ситуація погіршується. Тому як нова вершина береться точка, яка лежить на прямій, що проходить через протилежну вершину і середину протилежної грані і ділячої відрізок між відкиданою вершиною і серединою грані відносно 1:2 (точка розташовується ближче до грані). Координати цієї точки задаються виразом: u KN 0,5 0,5KLj . j n Значення K N заносять на місце L ого рядка таблиці K , а значення замість L ої N j компоненти вектора v . Побудову чергового симплексу виконують до тих пір, поки максимальна зі всіх відстаней від вершин симплексу до вершини, яка вважається якнайкращою, не стане менше наперед заданої величини. Якнайкращою на кожному кроці вважають вершину симплексу, якій відповідає якнайменше значення функції (K ) . Як вектор критеріїв, що мінімізується, при оцінці значень аеродинамічних коефіцієнтів K , 6 UA 83049 U розглядається погрішностей: вектор погрішностей (1). В результаті порівняння формується вектор Т ˆ ˆ ˆ ˆ ˆ V V*,H Н*, *, *, x * , z * (3), x ˆ z де * V*,Н*, *, *, * , * Т вектор параметрів просторового руху літального апарату, x z 5 10 відтворених авіаційним тренажером; Т ˆ ˆ ˆ ˆ ˆ ˆ ˆ V,H, ,,x ,z вектор параметрів просторового руху реального літального апарата після обробки польотної інформації бортового пристрою реєстрації. Застосування методу симплекс-планування дозволяє обчислити в моменти часу t , які визначаються частотою реєстрації польотної інформації бортовим пристроєм реєстрації, оптимальні оцінні значення всіх аеродинамічних коефіцієнтів сил і моментів , при яких вектор (3) погрішностей (K) відтворення польоту реального ˆ ˆ ˆ ˆ ˆ ˆ ˆ K C , C , C s , m x , m y , m z h t літального апарата на авіаційному тренажері приймає мінімальне значення. З отриманих ˆ значень K для всієї безлічі допустимих керуючих дій x x в, x к , х н, ош Т формується матриця коректуючих 15 20 25 30 35 40 поправок K до моделі апроксимації "середнього" літального апарата, реалізованої апаратними засобами авіаційного тренажера. Нова (з урахуванням поправок K ) апроксимаційна модель об'єктивно відповідатиме індивідуальним особливостям кожного конкретного літального апарата, матеріали реєстрації польотної інформації якого використовувалися для отримання оцінних значень. Спосіб, що заявляється, здійснюється таким чином. Практична реалізація способу пояснюється на прикладі комплексного тренажера вертольота Мі-8МТ (КТВ). Як польотна інформація використані параметри просторового руху вертольота Мі-8МТ, зроблені при виконанні 15-ти польотів за програмою Державних льотних випробувань аварійно-експлуатаційного бортового реєстратора БУР-4-1. Спосіб реалізований за допомогою (фіг. 2) апаратних 1 і програмних 2 засобів КТВ і бортового пристрою реєстрації польотної інформації 3. Апаратні засоби 1 містять зв'язані між собою пристрій 4 для перезапису і введення польотної інформації, електронно-обчислювальну машину (ЕОМ) 5 і інтерфейс 6 зв'язку ЕОМ 5 з модулями КТВ. Програмні засоби 2 містять програму 7 структуризації і введення параметрів просторового руху літального апарата, програму 8 оптимальної фільтрації параметрів просторового руху літального апарата, програму 9 введення оцінних значень цих параметрів в ЕОМ 5, програму 10 розрахунку значень аеродинамічних коефіцієнтів і програму 11 формування в КТВ бази даних аеродинамічних коефіцієнтів. Апаратні 1 і програмні 2 засоби КТВ виконані з можливістю забезпечення оптимального інформаційного сполучення з бортовим пристроєм реєстрації польотної інформації 3, а також реалізації методу коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата на КТВ. Мінімізація універсальної згортки критеріїв з використовуванням методу симплекспланування здійснювалася за допомогою апробованого програмного забезпечення, реалізованого на мові Borland C++ 3.1 в пакеті програм TURBO-OPTIM. Пакет програм розроблений з використанням методів об'єктно-орієнтованого програмування, що дозволило застосовувати ряд ефективних алгоритмів для обчислення диференціальних рівнянь і функціоналів. Технологія проведення на КТВ експериментів за оцінкою точності застосування методу коректування аеродинамічних коефіцієнтів включала наступні процедури. Для кожного експерименту (польоту вертольота) здійснювали: - визначення оптимальних значень x x , x , х , Т складових вектора керуючих дій і ˆ ˆ в ˆ к ˆ н ˆ ош 45 вектора V,Н, , , , Т параметрів просторового руху вертольота в результаті обробки ˆ ˆ ˆ ˆ ˆ ˆ ˆ x z польотної інформації; Т керуючих сигналів з періодом оновлення ˆ ˆ ˆ ˆ ˆ x xв, xк , хн, ош інформації на комплексному тренажері; - фіксацію значень складових вектора U зовнішніх дій, який включає атмосферний тиск, температуру навколишнього середовища, швидкість і напрям вітру; - узгодження значень 50 7 UA 83049 U - рішення рівнянь динаміки просторового руху вертольота при заданих керуючих і зовнішніх діях по штатних алгоритмах, реалізованих на КТВ; - фіксацію для кожного дискретного моменту часу t значень вектора * V*,Н*,*,*,* ,* Т x z 5 10 параметрів просторового руху вертольота і вектора K * * * * * * * аеродинамічних C , C , C s , m x , m y , m z h t сил і моментів, отриманих на КТВ; - обчислення значень вектора pr апріорних (до застосування методу коректування аеродинамічних коефіцієнтів) погрішностей відтворення параметрів просторового руху вертольота на КТВ; - обчислення оптимальних оцінних значень аеродинамічних коефіцієнтів сил і моментів ˆ C , C , C ,m ,m ,m з використанням прикладних програм, що реалізовують метод симплексK ˆ ˆ ˆ ˆ ˆ ˆ t h s x y z планування; ˆ - обчислення значень вектора K K K * і формування матриці коректуючих поправок до апроксимаційної моделі, реалізованої на КТВ, при заданих керуючих параметрах 15 20 параметрах U зовнішнього середовища; ps ˆ x і - обчислення значень вектора апостеріорних (після застосування методу коректування аеродинамічних коефіцієнтів) погрішностей відтворення параметрів просторового руху вертольота на КТВ. Для серії експериментів визначалися: - абсолютні значення апріорних (до застосування методу коректування) і апостеріорних (після застосування методу коректування) погрішностей відтворення кожного i го параметра просторового руху вертольота з складу вектора V,Н, ,, , Т по формулах: x z pr та ˆ pr (* ) i i i ps ˆ ps (* ) i i i (4); - середні значення апріорних і апостеріорних погрішностей відтворення кожного i го параметра просторового руху вертольота по формулах: 1 N pr ) m pr ( n Nn 1 i i 25 де N кількість експериментів; - середньоквадратичні відхилення значень апріорних і апостеріорних погрішностей відтворення кожного i го параметра просторового руху вертольота по формулах: 1 N pr 2, pr m pr )n ( N 1n 1 i i i 1 N ps 2. ps m ps )n ( i N 1n 1 i i 30 35 40 (5), (6) Результати експериментів, що характеризують точність пропонованого методу коректування математичної моделі просторового руху вертольота типа Мі-8МТ, представлені на фіг. 3-6. Аналіз приведених результатів експериментів показує, що в коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту вертольота Мі-8МТ з використанням методу симплекс-планування дозволило зменшити погрішність відтворення динаміки його польоту на КТВ в середньому в 3 рази в порівнянні з моделлю апроксимації "середнього" вертольота. Зокрема, аналіз результатів експериментів, виконаних при зміні подовжнього ходу ручки циклічного кроку в діапазоні x 10... 30 мм, показує, що середні значення апріорних (до в застосування методу коректування) погрішностей відтворення на КТВ параметрів руху вертольота Мі-8МТ знаходяться в межах від 5 % (для висоти польоту) до 7,5 % (для швидкостей зміни кутів крену і тангажа) від істинного значення оцінюваного параметра (фіг. 3, 4). Середні значення апостеріорних (після застосування методу коректування) погрішностей складають менше 2 %, а для таких важливих параметрів, як висота і швидкість польоту вертольота 8 UA 83049 U 5 10 15 20 менше 1,5 %. Аналіз середньоквадратичних відхилень значень апріорних і апостеріорних погрішностей відтворення параметрів просторового руху вертольота показав, що погрішність оцінки середніх значень погрішностей складає 10-12 % і дозволяє зробити висновок про прийнятності об'єму експериментальних даних. Аналіз результатів експериментів, виконаних при зміні ходу педалей шляхового керування xн 20... 20 мм, показує, що середні значення апріорних погрішностей відтворення на КТВ параметрів руху згаданого вертольота можуть досягати 9 % (для висоти польоту) від істинного значення оцінюваного параметра, тоді як середні значення апостеріорних погрішностей не перевищують 1,5 % (фіг. 5, 6). Максимальна погрішність оцінки середніх значень погрішностей кутів крену і тангажа складає 14 %, що дозволяє вважати прийнятним об'єм експериментальних даних. Приведені результати експериментальної перевірки підтверджують більш високу точність відтворення на КТВ динаміки польоту вертольота Мі-8МТ, виконане з використанням способу, що заявляється. Підвищення точності відтворення на авіаційному тренажері динаміки польоту конкретних літальних апаратів дозволяє істотно розширити область застосування способу, що заявляється, при виконанні завдань, що вимагають максимальної наближеності до умов виконання польоту на реальному літальному апараті, у тому числі на заключних етапах навчання льотчиків, при виконанні відновної підготовки льотчиків і при розслідуванні причин надзвичайних льотних випадків. Відносна простота і порівняно невеликий об'єм обчислень по корекції математичних моделей динаміки просторового положення літальних апаратів з використанням методу симплекс-планування дозволяють реалізувати спосіб, що заявляється, на комплексних і спеціалізованих авіаційних тренажерах різного призначення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Спосіб визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері, який полягає в тому, що за допомогою апаратних і програмних засобів авіаційного тренажера здійснюють коректування аеродинамічних коефіцієнтів математичної моделі динаміки польоту літального апарата з використанням методу симплекс-планування, при якому нормують змінні значення аеродинамічних коефіцієнтів сил і моментів просторового руху літального апарата, зареєстрованих бортовим пристроєм реєстрації польотної інформації, вибирають початковий симплекс і здійснюють, з використанням рівнянь динаміки руху літального апарата, побудову різниці між параметрами його реального просторового положення і аналогічними параметрами, відтвореними апаратними і програмними засобами авіаційного тренажера, визначають оптимальні оцінні значення чергового симплексу з мінімізацією розбіжностей між їх необхідними і розрахунковими значеннями до заданої величини, формують матрицю коректуючих поправок до апроксимаційної моделі "середнього" літального апарата на авіаційному тренажері і коректують математичну модель динаміки польоту літального апарата на авіаційному тренажері. 9 UA 83049 U 10 UA 83049 U 11 UA 83049 U 12 UA 83049 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 13
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for the determination of aerodynamic coefficients when simulating aircraft at aviation training device
Автори англійськоюPetrov Roman Mykolaiovych, Motsar Petro Ivanovych, Ratnikov Ihor Mykolaiovych
Назва патенту російськоюСпособ определения аэродинамических коэффициентов при моделировании летательного аппарата на авиационном тренажере
Автори російськоюПетров Роман Николаевич, Моцар Петр Иванович, Ратников Игорь Николаевич
МПК / Мітки
Мітки: літального, тренажері, апарата, визначення, моделюванні, авіаційному, спосіб, коефіцієнтів, аеродинамічних
Код посилання
<a href="https://ua.patents.su/15-83049-sposib-viznachennya-aerodinamichnikh-koeficiehntiv-pri-modelyuvanni-litalnogo-aparata-na-aviacijjnomu-trenazheri.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення аеродинамічних коефіцієнтів при моделюванні літального апарата на авіаційному тренажері</a>
Тришарова обшивка аеродинамічних поверхонь безпілотного літального апарата
Номер патенту: 72786
Опубліковано: 27.08.2012
Автори: Матійчик Денис Михайлович, Макарчук Максим Віталійович, Кривенко Кирило Володимирович
МПК: B64C 3/26
Мітки: літального, апарата, тришарова, поверхонь, аеродинамічних, обшивка, безпілотного
Формула / Реферат:
Тришарова обшивка аеродинамічної поверхні безпілотного літального апарата, яка складається з внутрішнього та зовнішнього зміцнювальних шарів, які щільно приклеєні до наповнювача, що між ними, яка відрізняється тим, що як зовнішній зміцнюючий та декоративно-захисний шар для бальзового наповнювача, у вигляді листа, застосовано полімерну багатошарову плівку з клеєвим шаром, що полімеризується під дією температури, а як внутрішній зміцнювальний...
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Герасименко Володимир Вікторович, Щипанський Павло Володимирович, Блаженний Валерій Іванович, Слєпов Лев Іванович
МПК: G01S 5/10
Мітки: апарата, спосіб, літального, визначення, місцеположення
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Спосіб діагностики зовнішнього обводу літального апарата на основі температурного поля площини літального апарата в польоті
Номер патенту: 73709
Опубліковано: 10.10.2012
Автори: Бабенко Андрій Євгенійович, Казак Владислав Аурелійович, Казак Василь Миколайович
МПК: G01N 25/72, B64D 45/00
Мітки: площині, польоті, температурного, поля, зовнішнього, обводу, основі, діагностики, літального, спосіб, апарата
Формула / Реферат:
Спосіб діагностики зовнішнього обводу літального апарата на основі температурного поля площини літального апарата в польоті, за допомогою якого здійснюють у польоті моніторинг технічного стану зовнішнього обводу літального апарата у реальному часі; визначають момент часу, ступінь і місце виникнення пошкодження, який відрізняється тим, що для його реалізації застосовують теорію теплового поля, будують діагностичні матриці вагових коефіцієнтів...
Спосіб вимірювання аеродинамічних коефіцієнтів повздовжнього руху літаків
Номер патенту: 48566
Опубліковано: 15.08.2002
Автори: Резніченко Володимир Миколайович, Сільвестров Антон Миколайович
МПК: G01M 9/00
Мітки: літаків, коефіцієнтів, аеродинамічних, повздовжнього, руху, вимірювання, спосіб
Формула / Реферат:
Спосіб вимірювання аеродинамічних коефіцієнтів (АДК) повздовжнього руху (ПР) літаків, згідно з яким послідовно у часі ступенево з різною амплітудою змінюють положення керуючого органа літака, реєструють відхилення змінних стану і за умови близькості цих змінних та змінних математичної моделі повздовжнього руху для кожної сходинки або всієї сукупності сходинок керуючого органа визначають оцінки АДК, який відрізняється тим, що по оцінках АДК...
Спосіб визначення залишкової міцності конструкції літального апарата в польоті
Номер патенту: 73939
Опубліковано: 10.10.2012
Автори: Комаров Володимир Олександрович, Расстригін Олександр Олексійович, Гордієвський Олексій Тихонович, Архипов Микола Іванович, Гудима Олег Петрович, Кузнецов Владлен Олександрович, Башинський Володимир Григорович
МПК: G01M 7/00
Мітки: апарата, польоті, визначення, міцності, спосіб, літального, залишкової, конструкції
Формула / Реферат:
Спосіб визначення залишкової міцності конструкції літального апарата в польоті, при якому заміряють перевантаження в центрі мас літального апарата, на кінцевій і середній частинах крила, на кінцевих частинах стабілізатора і кіля, по величині якого судять про навантаження і дефектність конструкції, який відрізняється тим, що підсумовують обмірювані в центрі мас літального апарата і на закінцівках крила величини перевантажень, визначають...
Попередній патент: Суміш для ентерального харчування хворих при гіперметаболізмі “енергія відновлення”
Наступний патент: Вихровий змішувач
Випадковий патент: Конструкція насадка з розпилювачем у зборі