Тепловізор
Номер патенту: 119337
Опубліковано: 25.09.2017
Автори: Антонюк Віктор Степанович, Ткаченко Валентин Федорович, Андрієнко Володимир Олександрович, Ральченко Світлана Петрівна, Бондаренко Максим Олексійович

Формула / Реферат
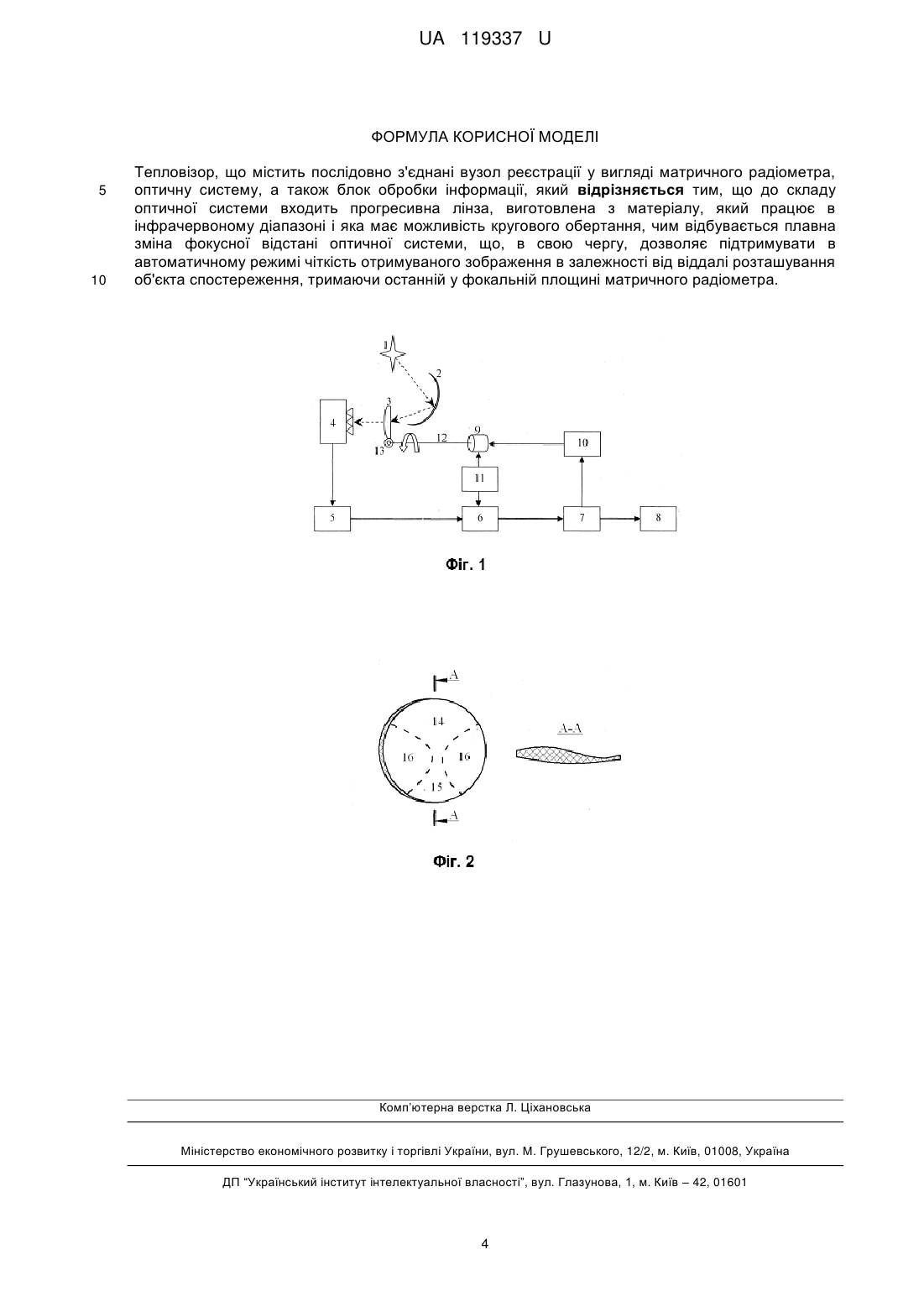
Тепловізор, що містить послідовно з'єднані вузол реєстрації у вигляді матричного радіометра, оптичну систему, а також блок обробки інформації, який відрізняється тим, що до складу оптичної системи входить прогресивна лінза, виготовлена з матеріалу, який працює в інфрачервоному діапазоні і яка має можливість кругового обертання, чим відбувається плавна зміна фокусної відстані оптичної системи, що, в свою чергу, дозволяє підтримувати в автоматичному режимі чіткість отримуваного зображення в залежності від віддалі розташування об'єкта спостереження, тримаючи останній у фокальній площині матричного радіометра.
Текст
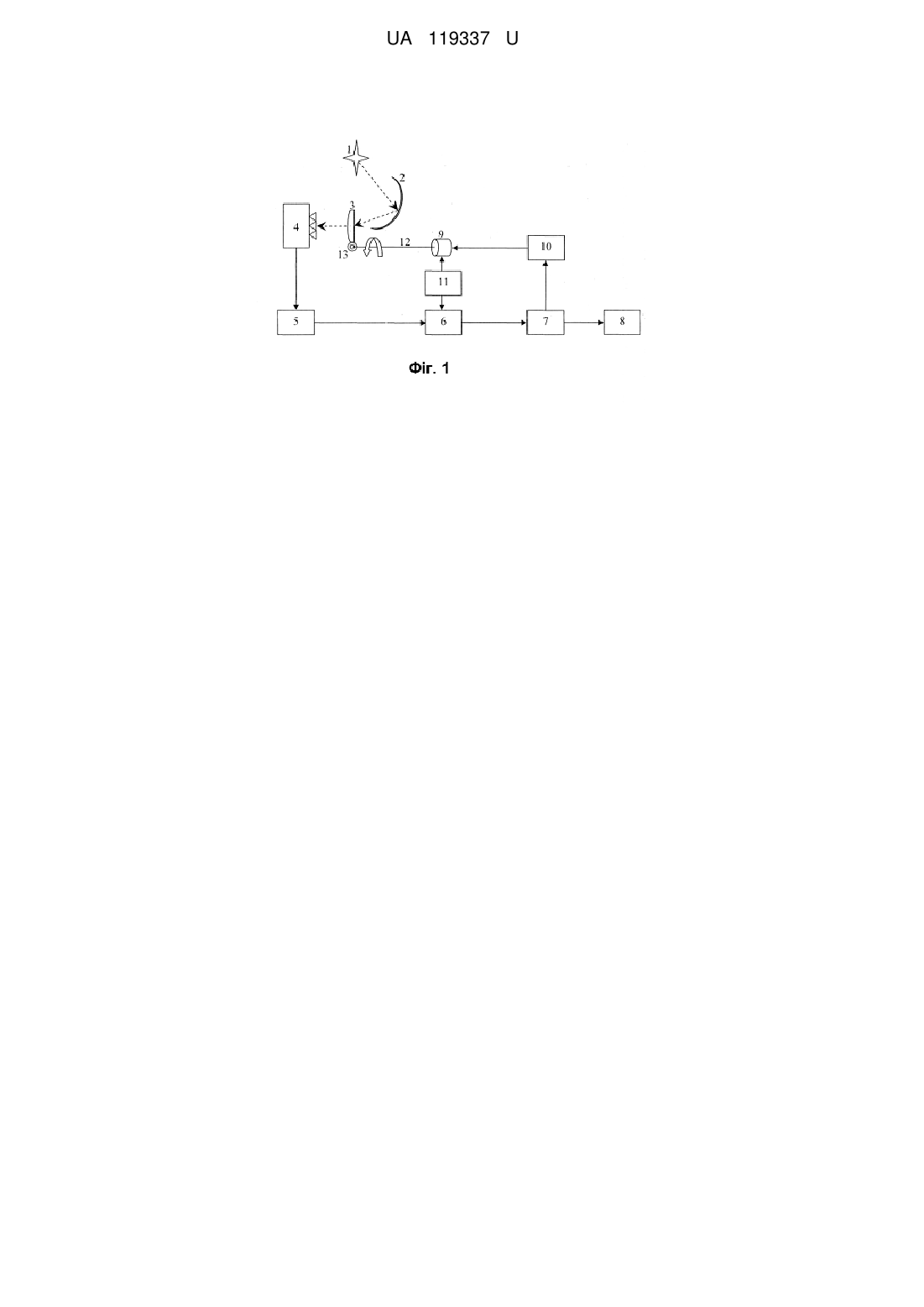
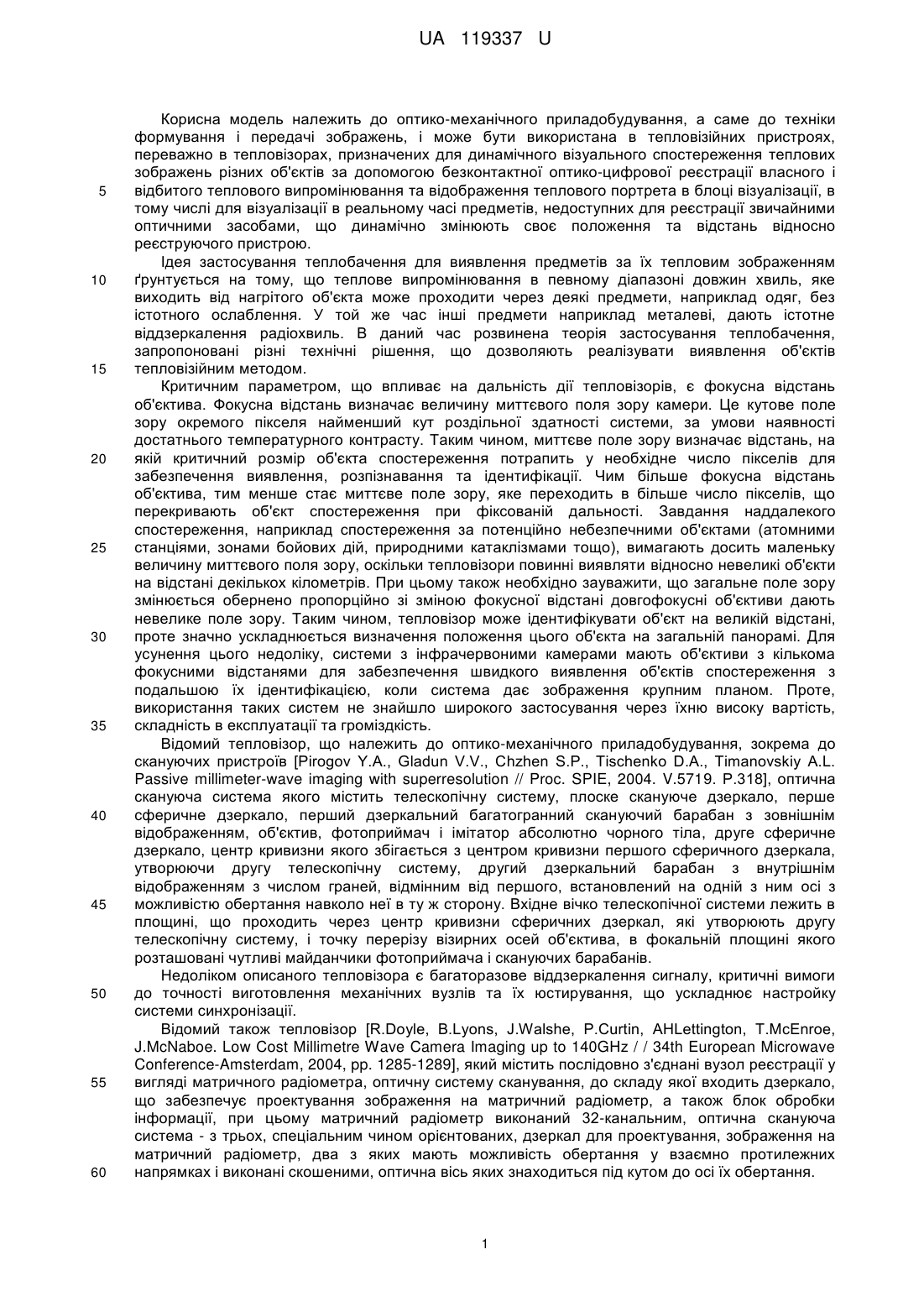
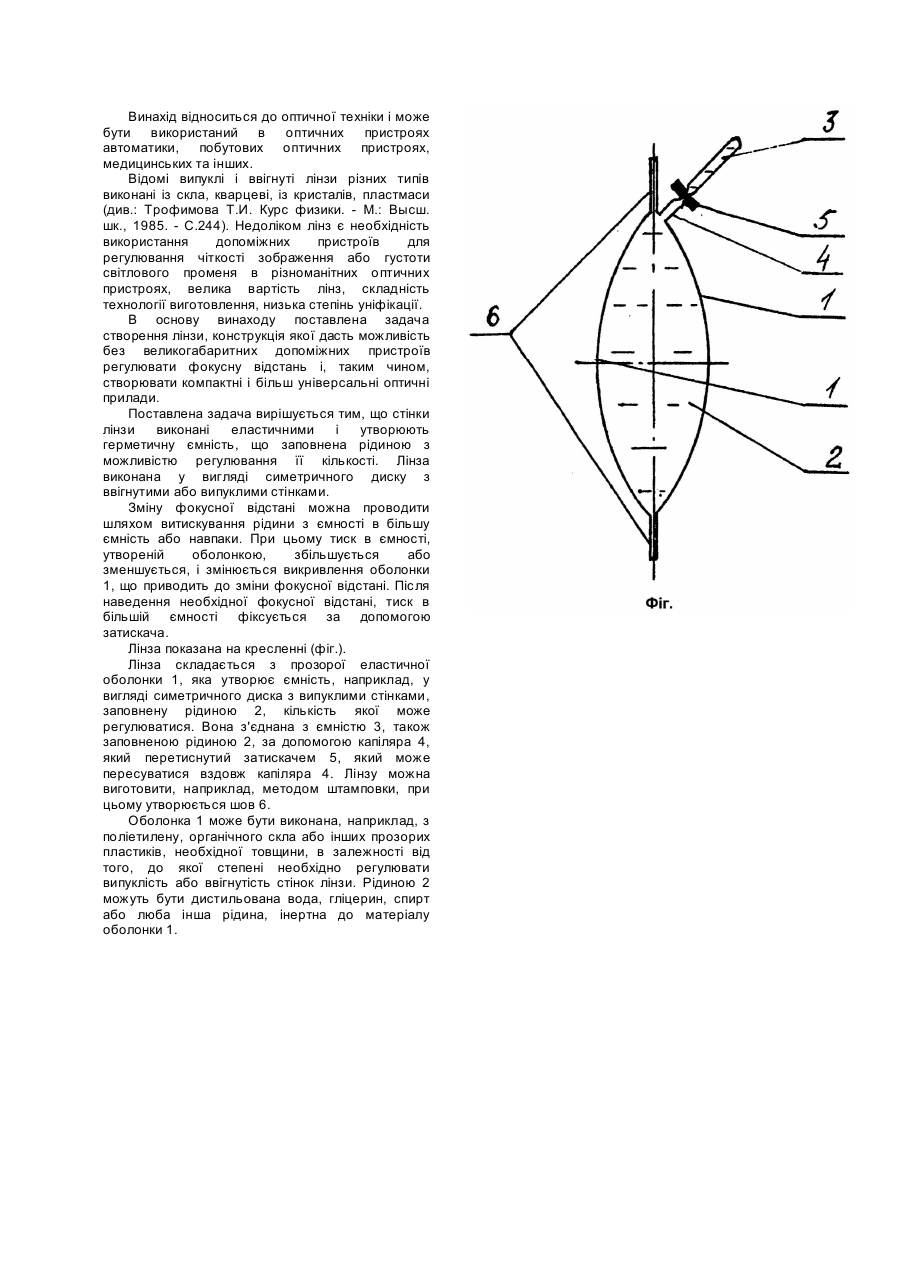
Реферат: Тепловізор містить послідовно з'єднані вузол реєстрації у вигляді матричного радіометра, оптичну систему, а також блок обробки інформації. До складу оптичної системи входить прогресивна лінза, виготовлена з матеріалу, який працює в інфрачервоному діапазоні і яка має можливість кругового обертання, чим відбувається плавна зміна фокусної відстані оптичної системи, що, в свою чергу, дозволяє підтримувати в автоматичному режимі чіткість отримуваного зображення в залежності від віддалі розташування об'єкта спостереження, тримаючи останній у фокальній площині матричного радіометра. UA 119337 U (12) UA 119337 U UA 119337 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до оптико-механічного приладобудування, а саме до техніки формування і передачі зображень, і може бути використана в тепловізійних пристроях, переважно в тепловізорах, призначених для динамічного візуального спостереження теплових зображень різних об'єктів за допомогою безконтактної оптико-цифрової реєстрації власного і відбитого теплового випромінювання та відображення теплового портрета в блоці візуалізації, в тому числі для візуалізації в реальному часі предметів, недоступних для реєстрації звичайними оптичними засобами, що динамічно змінюють своє положення та відстань відносно реєструючого пристрою. Ідея застосування теплобачення для виявлення предметів за їх тепловим зображенням ґрунтується на тому, що теплове випромінювання в певному діапазоні довжин хвиль, яке виходить від нагрітого об'єкта може проходити через деякі предмети, наприклад одяг, без істотного ослаблення. У той же час інші предмети наприклад металеві, дають істотне віддзеркалення радіохвиль. В даний час розвинена теорія застосування теплобачення, запропоновані різні технічні рішення, що дозволяють реалізувати виявлення об'єктів тепловізійним методом. Критичним параметром, що впливає на дальність дії тепловізорів, є фокусна відстань об'єктива. Фокусна відстань визначає величину миттєвого поля зору камери. Це кутове поле зору окремого пікселя найменший кут роздільної здатності системи, за умови наявності достатнього температурного контрасту. Таким чином, миттєве поле зору визначає відстань, на якій критичний розмір об'єкта спостереження потрапить у необхідне число пікселів для забезпечення виявлення, розпізнавання та ідентифікації. Чим більше фокусна відстань об'єктива, тим менше стає миттєве поле зору, яке переходить в більше число пікселів, що перекривають об'єкт спостереження при фіксованій дальності. Завдання наддалекого спостереження, наприклад спостереження за потенційно небезпечними об'єктами (атомними станціями, зонами бойових дій, природними катаклізмами тощо), вимагають досить маленьку величину миттєвого поля зору, оскільки тепловізори повинні виявляти відносно невеликі об'єкти на відстані декількох кілометрів. При цьому також необхідно зауважити, що загальне поле зору змінюється обернено пропорційно зі зміною фокусної відстані довгофокусні об'єктиви дають невелике поле зору. Таким чином, тепловізор може ідентифікувати об'єкт на великій відстані, проте значно ускладнюється визначення положення цього об'єкта на загальній панорамі. Для усунення цього недоліку, системи з інфрачервоними камерами мають об'єктиви з кількома фокусними відстанями для забезпечення швидкого виявлення об'єктів спостереження з подальшою їх ідентифікацією, коли система дає зображення крупним планом. Проте, використання таких систем не знайшло широкого застосування через їхню високу вартість, складність в експлуатації та громіздкість. Відомий тепловізор, що належить до оптико-механічного приладобудування, зокрема до скануючих пристроїв [Pirogov Y.A., Gladun V.V., Chzhen S.P., Tischenko D.A., Timanovskiy A.L. Passive millimeter-wave imaging with superresolution // Proc. SPIE, 2004. V.5719. P.318], оптична скануюча система якого містить телескопічну систему, плоске скануюче дзеркало, перше сферичне дзеркало, перший дзеркальний багатогранний скануючий барабан з зовнішнім відображенням, об'єктив, фотоприймач і імітатор абсолютно чорного тіла, друге сферичне дзеркало, центр кривизни якого збігається з центром кривизни першого сферичного дзеркала, утворюючи другу телескопічну систему, другий дзеркальний барабан з внутрішнім відображенням з числом граней, відмінним від першого, встановлений на одній з ним осі з можливістю обертання навколо неї в ту ж сторону. Вхідне вічко телескопічної системи лежить в площині, що проходить через центр кривизни сферичних дзеркал, які утворюють другу телескопічну систему, і точку перерізу візирних осей об'єктива, в фокальній площині якого розташовані чутливі майданчики фотоприймача і скануючих барабанів. Недоліком описаного тепловізора є багаторазове віддзеркалення сигналу, критичні вимоги до точності виготовлення механічних вузлів та їх юстирування, що ускладнює настройку системи синхронізації. Відомий також тепловізор [R.Doyle, B.Lyons, J.Walshe, P.Curtin, AHLettington, T.McEnroe, J.McNaboe. Low Cost Millimetre Wave Camera Imaging up to 140GHz / / 34th European Microwave Conference-Amsterdam, 2004, pp. 1285-1289], який містить послідовно з'єднані вузол реєстрації у вигляді матричного радіометра, оптичну систему сканування, до складу якої входить дзеркало, що забезпечує проектування зображення на матричний радіометр, а також блок обробки інформації, при цьому матричний радіометр виконаний 32-канальним, оптична скануюча система - з трьох, спеціальним чином орієнтованих, дзеркал для проектування, зображення на матричний радіометр, два з яких мають можливість обертання у взаємно протилежних напрямках і виконані скошеними, оптична вісь яких знаходиться під кутом до осі їх обертання. 1 UA 119337 U 5 10 15 20 25 30 35 40 45 50 55 60 В результаті використання описаного тепловізора можливе отримання зображень предметів розмірами до 0,62,0 м з роздільною здатністю 10 мм на відстані до 2 м. Для одержуваних зображень характерні спотворення, які проявляються у вигляді модуляції яскравості в напрямку, перпендикулярному напрямку сканування. При використанні 32-канального матричного радіометра забезпечується чутливість, достатня для того, щоб проводити сканування з частотою 10 кадрів, в секунду. Недоліком такої системи є наявність багаторазового - не менше 4 разів віддзеркалення сигналу при проходженні системи дзеркал, що призводить до ослаблення сигналу і спотворень через дифракційне розсіювання. Для компенсації ослаблення сигналу застосовується порівняно велика кількість (32) канали матричного радіометра, вартість яких в даний час досить велика порівнянна з вартістю усіх інших елементів конструкції. Крім того, обертання скошених дзеркал з необхідною для даної задачі великою апертурою (близько 60 см) пов'язане з великими механічними навантаженнями на приводи через необхідність подолання значного механічного моменту, що постійно змінюється. А оскільки у скошених дзеркал оптична вісь відхилена від осі обертання, то обертання таких дзеркал неминуче супроводжується наявністю вібрацій, механічного та акустичного шуму. Ще одним недоліком є невеликий діапазон фокусних відстаней, на яких може підтримуватися висока чутливість та чіткість отримуваних зображень теплових портретів, а також динамічна зміна фокусної відстані в процесі роботи пристрою. Зазначені фактори обмежують застосування даної моделі в умовах нестаціонарних, динамічних навантажень. Найбільш близьким по технічній суті до корисної моделі, що заявляється, є тепловізор, в якому за рахунок переходу від лінійного сканування до конічного створюються умови для зменшення механічних навантажень на приводи, зниження вібрацій, механічного та акустичного шуму, внаслідок чого забезпечується можливість використання пропонованого тепловізора в умовах нестаціонарних, динамічних навантажень, забезпечується також поліпшення просторово-часових характеристик тепловізора при збереженні можливості отримання радіозображень в режимі реального часу. [Патент РФ 2369847, МПК G0U5/28, 2009]. Недоліком даного пристрою є те, що сканування ним в реальному часі об'єктів спостереження, які динамічно змінюють своє положення та відстань відносно реєструючого пристрою неможливо без ручного перелаштування оптичної системи, що у випадках використання пристрою в умовах незручних для обслуговування (теплографічне картування з літака або гелікоптера) або небезпечних для життя людини (зона високих тисків, електромагнітних полів або підвищеної радіоактивності) є неможливим. В основу корисної моделі поставлена задача поліпшення просторово-часових характеристик тепловізора, а саме - його чутливості в залежності від динамічної зміни відстані між об'єктом спостереження та реєструючим пристроєм тепловізора. У тепловізорі, що містить послідовно з'єднані вузол реєстрації у вигляді матричного радіометра, оптичну систему, до складу якої входить прогресивна лінза, виготовлена з матеріалу, що працює в інфрачервоному діапазоні (наприклад, сульфіду цинку ZnS), а також блок обробки інформації, відповідно до винаходу лінза має можливість кругового обертання, чим відбувається плавна зміна фокусної відстані оптичної системи. Оптична система також містить параболічне дзеркало, що фокусує теплове випромінювання від об'єкта спостереження на прогресивну лінзу, а основне призначення якого полягає в унеможливленні контакту прогресивної лінзи із зовнішнім середовищем, чим запобігається можливість механічного пошкодження та передчасного виходу з ладу як самої лінзи, так і приладу в цілому. Прогресивна лінза кінематично пов'язана з гумовим колесом, насадженим на шток крокового двигуна, вісь якого знаходиться в одній площині з оптичною віссю лінзи, проте зміщена відносно її центру. У зв'язку з тим, що в пропонованому тепловізорі не відбувається багаторазового віддзеркалення сигналу, як в пристрої по прототипу, а має місце лише одноразове віддзеркалення сигналу при проходженні через параболічне дзеркало, то ослаблення сигналу і спотворень через дифракційне розсіювання не відбувається. З іншого боку, через те, що виникає можливість автоматичного регулювання фокусною відстанню до об'єкта спостереження, необхідність використання в пристрої системи з інфрачервоними камерами, які мають об'єктиви з кількома фокусними відстанями відсутня. Усі вищеперераховані переваги розглядуваного винаходу дозволяють значно зменшити його вартість, складність в експлуатації та громіздкість. На кресленні, фіг. 1, представлена структурна схема тепловізора, що заявляється і досліджуваний об'єкт 1. Тепловізор складається параболічного дзеркала 2, прогресивної лінзи 3, матричного радіометра 4, блок синхронних детекторів 5, аналого-цифрового перетворювача 2 UA 119337 U 5 10 15 20 25 30 35 40 45 50 55 6, мікропроцесор управління роботою пристрою 7, блок комутації 8, кроковий двигун 9, кроковий двигун 10, оптичний датчик 11, шток крокового двигуна 12, гумове колесо 13, На фіг. 2 показано схематичне зображення прогресивної лінзи з зонами розподілу фокусної відстані де зона дальньої фокальної площини 14, зона ближньої фокальної площини 15 і зона периферійних положень фокальної площини 16. Тепловізор складається з послідовно з'єднаних вузла реєстрації у вигляді матричного радіометра 4, оптичної скануючої системи, до складу якої входить прогресивна лінза 3, виготовлена з матеріалу, що працює в інфрачервоному діапазоні (наприклад, сульфіду цинку ZnS) та параболічне дзеркало 2, що забезпечує проектування зображення на прогресивну лінзу 3, а також блока обробки інформації, відповідно до корисної моделі прогресивна лінза 3 має можливість кругового обертання, тим самим плавно змінюючи кривизну фокусуючої частини, що, в свою чергу, веде до зміни фокусної відстані, в дальній фокальній площині якої знаходиться об'єкт 1, а в ближній фокальній площині якої знаходиться матричний радіометр 4, при цьому для забезпечення кругового обертання згадана прогресивна лінза 3 кінематична пов'язана з гумовим колесом 13, насадженим на шток 12 крокового двигуна, вісь якого знаходиться в одній площині з оптичною віссю лінзи, проте зміщена відносно її центру, синхронізація обертання лінзи 3 з роботою матричного радіометра 4 здійснюється по оптичному датчику 11, а діапазон обертання лінзи 3 становить 360°, блок обробки інформації складається з блока синхронних детекторів 5, аналого-цифрового перетворювача 6, вбудованого мікропроцесора управління роботою пристрою 7 і блока комутації 8, що забезпечує зв'язок тепловізора із зовнішніми пристроями керування, збору та обробки інформації (наприклад, ПК, промисловим комп'ютером, тощо). Тепловізор працює наступним чином. Випромінювання від об'єкта 1 потрапляє на дзеркало 2, від якого віддзеркалюється на прогресивну лінзу 3, в якій фокусується на матричний радіометр 4, що передає інформацію на блок синхронних детекторів 5. З блока синхронних детекторів 5 інформація надходить в аналого-цифровий перетворювач 6 і далі, в цифровому вигляді, передається на вбудований мікропроцесор 7 управління роботою пристрою. Паралельно з цим, на мікропроцесор 7 надходить сигнал з оптичного датчика 11, який вимірює інтенсивність випромінювання, що потрапляє на лінзу 3. У випадку, коли об'єкт спостереження 1 знаходиться не у фокусі, оптодатчик 11 фіксує інтенсивність випромінювання, що відрізняється від максимальної, сигнал з датчика 11, через АЦП 6 поступає на мікропроцесор 7, який через драйвер управління кроковим двигуном J0 формує сигнал управління. Сигнал управління приводить в дію кроковий двигун 9, який починає покроково обертатися, тим самим, через шток 12 приводить в дію гумове колесо 13, яке, в свою чергу, обертаючись, починає обертати прогресивну лінзу 3 навколо її оптичної осі. • Прогресивна лінза 3, маючи спочатку найбільшу від'ємну кривизну лінзи в місці проходження інфрачервоного випромінювання від об'єкта спостереження, що забезпечує найбільше значення положення фокусу (зона 15, фіг. 2), обертаючись, змінює це положення вздовж свого периметра, чим змінює кривизну лінзи, проходячи зону периферійних положень фокальної площини (зона 16, фіг. 2) до найбільшого додатного значення, що забезпечує найменше значення положення фокусу (зона 14, фіг. 2), і далі, - змінюючи своє положення, проходячи наступну зону периферійних положень фокальної площини (зона 16, фіг. 2) до найбільшого від'ємного значення кривизни - максимально збільшує положення фокусу (зона 15, фіг. 2). В процесі обертання лінзи 3, коли сигнал з датчика 11 досягне максимального значення (що відповідатиме встановленню режиму максимальної чутливості, за яким, фокус лінзи 3 встановиться на поверхні матриці радіометра 4), мікропроцесор 7, через драйвер управління 10 зупинить кроковий двигун 9. Після обробки мікропроцесором 7 інформація про побудоване термографічне зображення, за допомогою блока комутації 8, може надходити на зовнішній пристрій керування, який, в свою чергу, може здійснювати збір та обробку отриманої інформації, а також проводити зовнішнє керування режимами роботи тепловізором. Використання запропонованого технічного рішення, дає можливість плавно змінювати фокусну відстань оптичної системи тепловізора, що, в свою чергу, дозволяє автоматично підтримувати чіткість отримуваного зображення в залежності від віддалі розташування об'єкта спостереження, тримаючи останній у фокальній площині реєструючого пристрою. 3 UA 119337 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Тепловізор, що містить послідовно з'єднані вузол реєстрації у вигляді матричного радіометра, оптичну систему, а також блок обробки інформації, який відрізняється тим, що до складу оптичної системи входить прогресивна лінза, виготовлена з матеріалу, який працює в інфрачервоному діапазоні і яка має можливість кругового обертання, чим відбувається плавна зміна фокусної відстані оптичної системи, що, в свою чергу, дозволяє підтримувати в автоматичному режимі чіткість отримуваного зображення в залежності від віддалі розташування об'єкта спостереження, тримаючи останній у фокальній площині матричного радіометра. Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: тепловізор
Код посилання
<a href="https://ua.patents.su/6-119337-teplovizor.html" target="_blank" rel="follow" title="База патентів України">Тепловізор</a>
Лінза
Номер патенту: 15206
Опубліковано: 30.06.1997
Автор: Башук Григорій Григорович
МПК: G02B 3/12
Мітки: лінза
Формула / Реферат:
1. Лінза, виконана з прозорими для видимого світла стінками, яка відрізняється тим, що стінки виконані еластичними і утворюють герметичну ємність, що заповнена рідиною з можливістю регулювання її кількості.2. Лінза по п.1, яка відрізняється тим, що вона виконана у вигляді симетричного диску з ввігнутими або випуклими стінками.
Спосіб формування відеосигналів тепловізійного зображення та пристрій для формування тепловізійного зображення -тепловізор
Номер патенту: 77817
Опубліковано: 15.01.2007
Автори: Лихоліт Микола Іванович, Ємельянов Анатолій Миколайович, Саєнко Іван Якович, Ріділа Олександр Степанович
МПК: H04N 5/33
Мітки: спосіб, тепловізор, пристрій, формування, зображення, тепловізійного, відеосигналів
Формула / Реферат:
1. Спосіб формування відеосигналів телевізійного зображення, у якому інфрачервоне теплове зображення формують формувачем зображення шляхом паралельного сканування сцени, що спостерігається, причому у фокальну площину формувача зображення вводять калібрувальні рівні у вигляді двох еталонних джерел випромінювання, при цьому порядово розділяють відеосигнали з виходу кожного елемента фотоприймача, підсумовують уздовж кожного рядка, виробляють...
Спосіб кріплення лінзи в оправі нарізними кільцями
Номер патенту: 105660
Опубліковано: 25.03.2016
Автори: Подолян Олександр Олександрович, Писаренко Олена Леонідівна
МПК: G02B 7/04
Мітки: кільцями, нарізними, кріплення, спосіб, лінзи, оправи
Формула / Реферат:
Спосіб кріплення лінзи в оправі, який включає встановлення лінзи в оправу, на яку накладається основний запобіжний ущільнювач, після чого закручується основне нарізне кільце, який відрізняється тим, що лінза встановлюється на допоміжний запобіжний ущільнювач, який накладається на допоміжне нарізне кільце, що закручується в оправу до встановлення лінзи, при цьому основне та допоміжне нарізне кільце повторюють контур лінзи з боку...
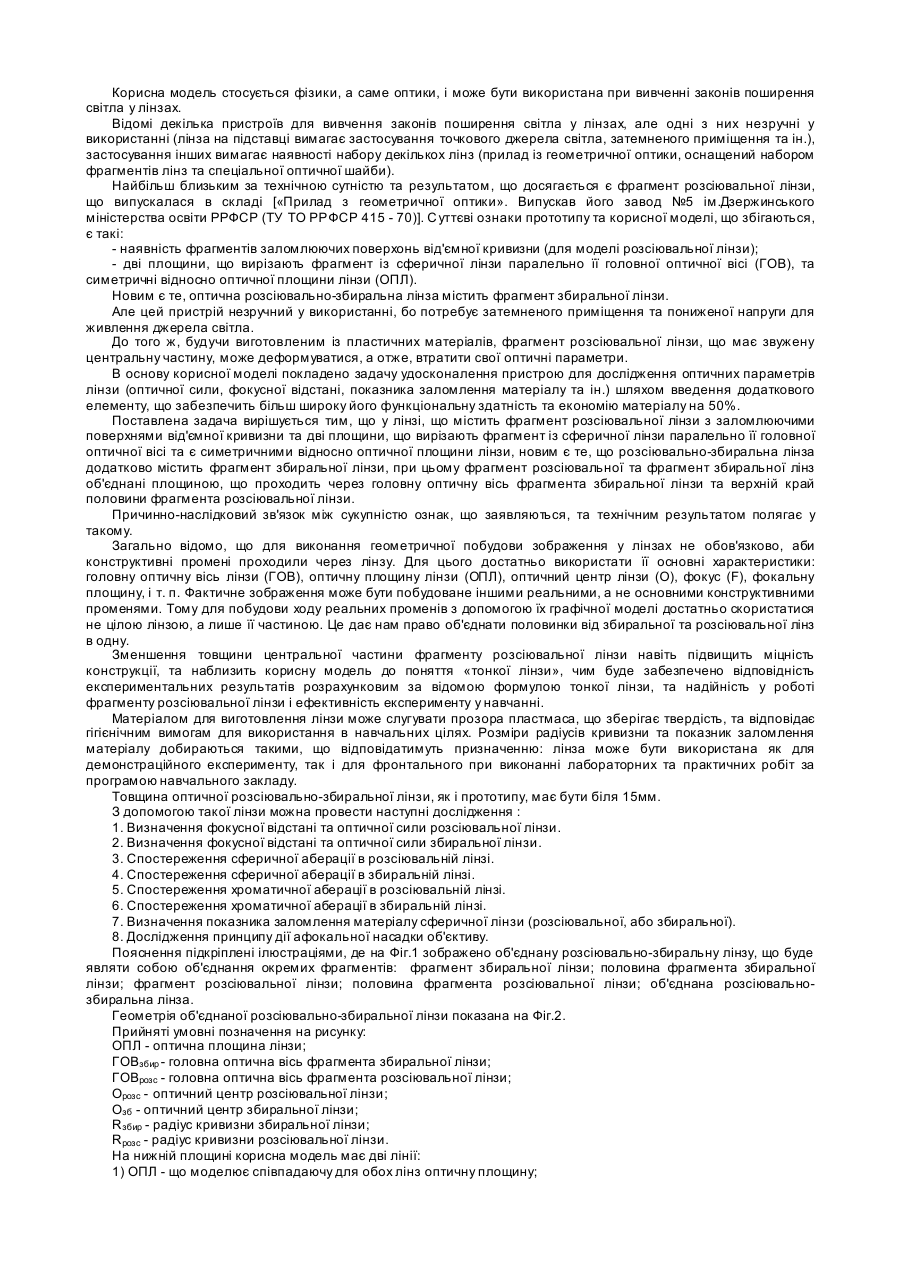
Оптична розсіювально-збиральна лінза
Номер патенту: 8789
Опубліковано: 15.08.2005
Автор: Жмурський Семен Іванович
МПК: G02B 3/00
Мітки: лінза, розсіювально-збиральна, оптична
Формула / Реферат:
Оптична розсіювально-збиральна лінза, що містить фрагмент розсіювальної лінзи з заломлюючими поверхнями від'ємної кривизни та дві площини, що вирізають фрагмент із сферичної лінзи паралельно її головної оптичної осі та є симетричними відносно оптичної площини лінзи, яка відрізняється тим, що розсіювально-збиральна лінза додатково містить фрагмент збиральної лінзи, при цьому фрагмент розсіювальної та фрагмент збиральної лінз об'єднані...
Ультразвуковий інгалятор
Номер патенту: 49428
Опубліковано: 26.04.2010
Автор: Шарапов Валерій Михайлович
МПК: G21H 1/00, H02M 11/00, H02N 1/00, H02N 2/18
Мітки: інгалятор, ультразвуковий
Формула / Реферат:
Ультразвуковий інгалятор, що містить корпус з вхідним та вихідним отворами, п'єзоелектричний перетворювач, генератор електричних коливань, вентилятор та акустичну лінзу, який відрізняється тим, що лінза виконана у вигляді сектора сфери, а на поверхні лінзи розташовані лінзи у вигляді секторів сфери меншого діаметра.
Попередній патент: Двотактний симетричний підсилювач струму
Наступний патент: Спосіб нормалізації вмісту цитокінів в крові при вторинно-хронічному запаленні
Випадковий патент: Багатоступеневий електронний перетворювач електричної енергії