Спосіб гасіння пожежі мобільним роботом
Номер патенту: 122802
Опубліковано: 25.01.2018
Автори: Дейнеко Наталя Вікторівна, Рибка Євгеній Олексійович, Поспєлов Борис Борисович, Андронов Володимир Анатолійович

Формула / Реферат
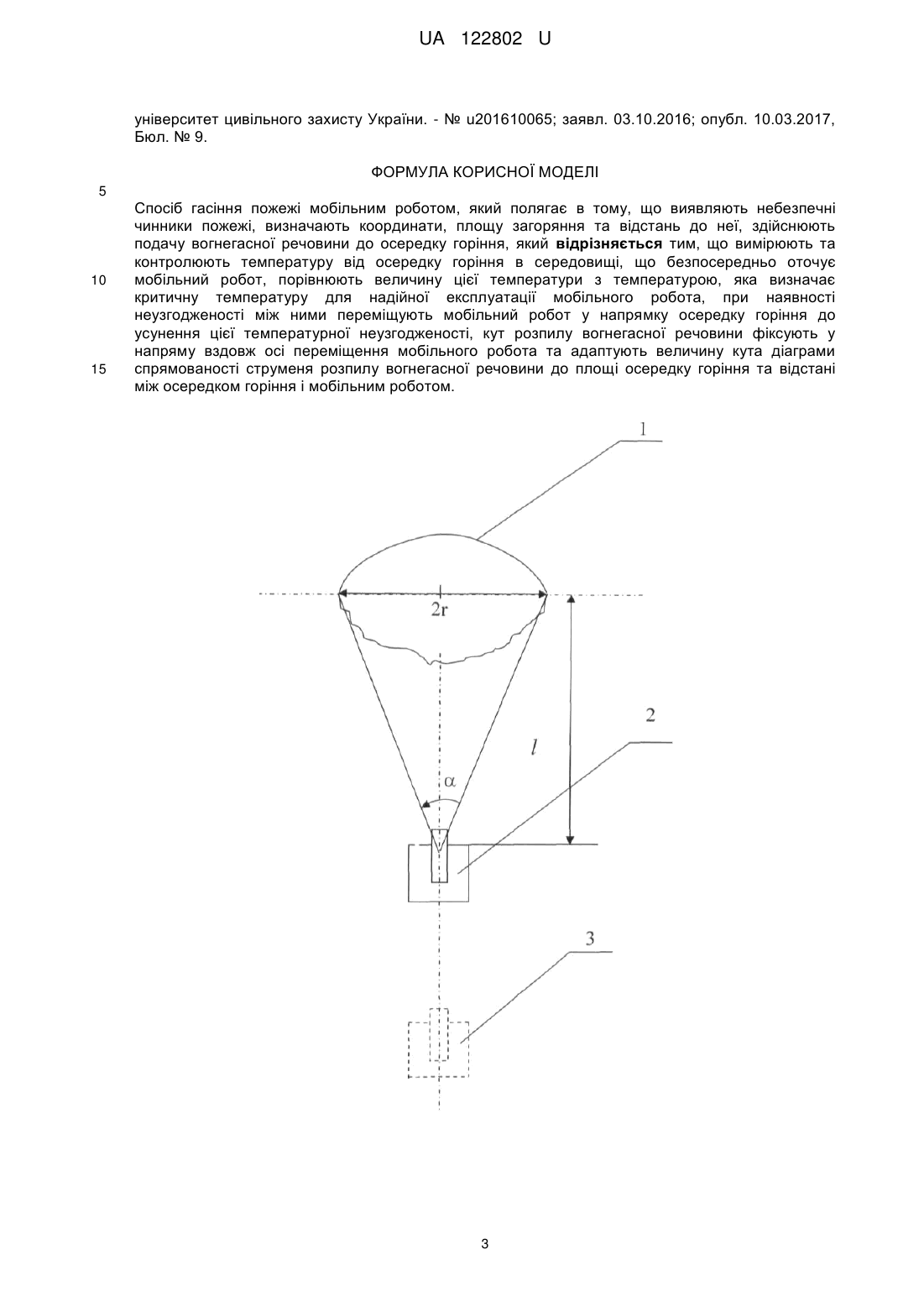
Спосіб гасіння пожежі мобільним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, здійснюють подачу вогнегасної речовини до осередку горіння, який відрізняється тим, що вимірюють та контролюють температуру від осередку горіння в середовищі, що безпосередньо оточує мобільний робот, порівнюють величину цієї температури з температурою, яка визначає критичну температуру для надійної експлуатації мобільного робота, при наявності неузгодженості між ними переміщують мобільний робот у напрямку осередку горіння до усунення цієї температурної неузгодженості, кут розпилу вогнегасної речовини фіксують у напряму вздовж осі переміщення мобільного робота та адаптують величину кута діаграми спрямованості струменя розпилу вогнегасної речовини до площі осередку горіння та відстані між осередком горіння і мобільним роботом.
Текст
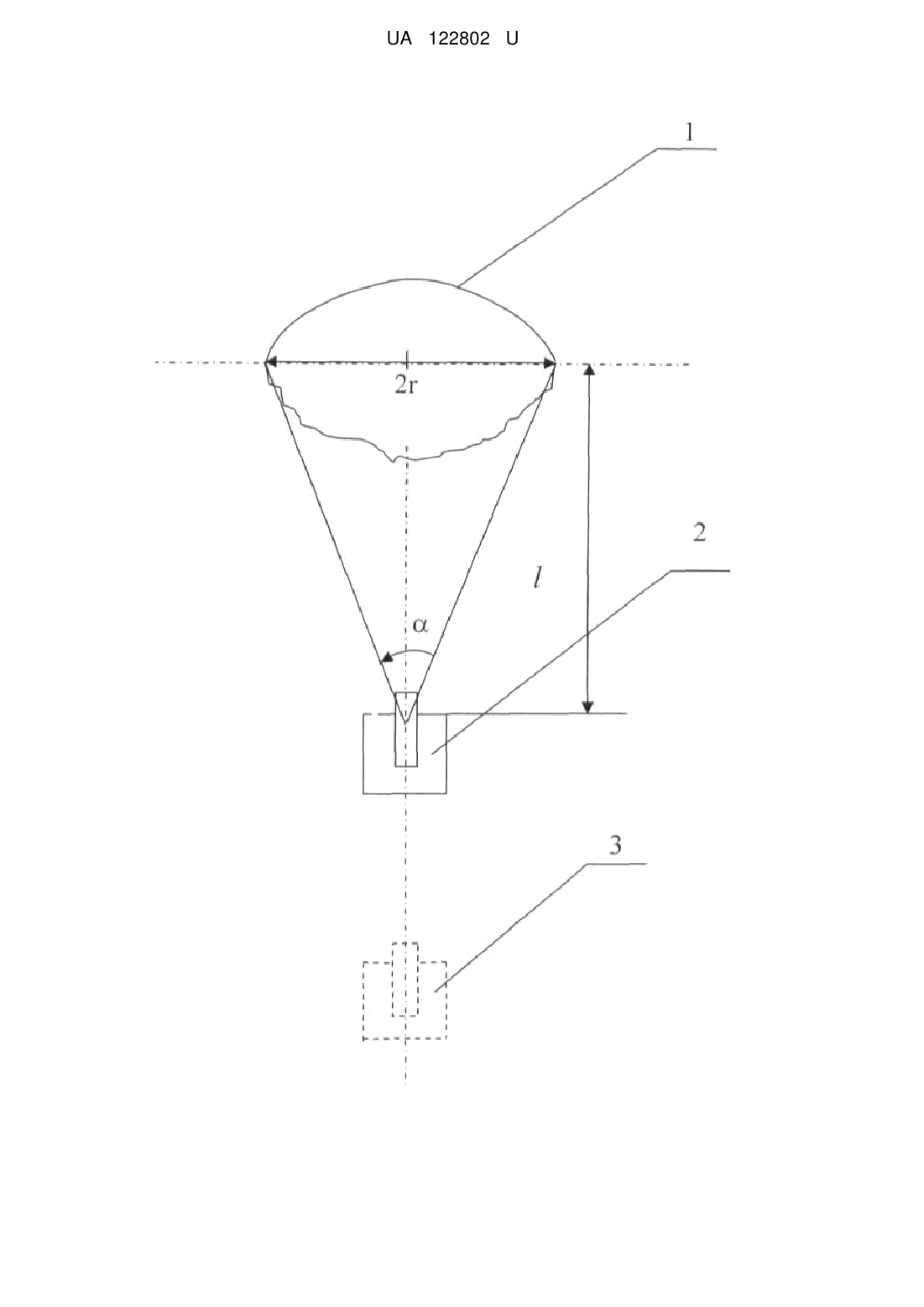
Реферат: Спосіб гасіння пожежі мобільним роботом полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, здійснюють подачу вогнегасної речовини до осередку горіння. Вимірюють та контролюють температуру від осередку горіння в середовищі, що безпосередньо оточує мобільний робот, порівнюють величину цієї температури з температурою, яка визначає критичну температуру для надійної експлуатації мобільного робота, при наявності неузгодженості між ними переміщують мобільний робот у напрямку осередку горіння до усунення цієї температурної неузгодженості, кут розпилу вогнегасної речовини фіксують у напряму вздовж осі переміщення мобільного робота та адаптують величину кута діаграми спрямованості струменя розпилу вогнегасної речовини до площі осередку горіння та відстані між осередком горіння і мобільним роботом. UA 122802 U (12) UA 122802 U UA 122802 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області гасіння пожежі із використанням мобільних пожежних роботів. Відомий спосіб гасіння пожежі із використанням мобільного пожежного робота, який полягає в тому, що виявляють небезпечні чинники пожежі та її адресу, формують команду по наведенню лафетного ствола, підключають пожежного робота до гідромагістралі і здійснюють подачу вогнегасної речовини за адресою пожежі [1]. Недоліком такого способу гасіння пожежі мобільним пожежним роботом є те, що його реалізація передбачає апріорі визначену конфігурацію пожежного навантаження в зоні, яка захищається. Відомий спосіб гасіння пожежі із використанням мобільного пожежного робота, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу осередку горіння та відстань від нього, переміщують пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до осередку горіння [2]. Недоліком такого способу гасіння пожежі є те, що не повною мірою враховується тепловий потік від осередку горіння для вибору місця розташування пожежного робота, внаслідок чого не завжди здійснюється вибір мінімальної відстані між пожежним роботом та осередком горіння. Це призводить до зниження кількості вогнегасної речовини, що надходить до осередку горіння і, як наслідок, зростає час гасіння пожежі, тобто у цілому знижується загальна ефективність гасіння. Найбільш близьким до способу, що заявляється та обраний нами за найближчий аналог є спосіб гасіння пожежі мобільним пожежним роботом [3], який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу вогнища загоряння та відстань до нього, переміщують пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до вогнища загоряння, контролюють величину теплового потоку від вогнища загоряння, порівнюють цю величину із апріорі заданою, при наявності неузгодженості між ними переміщують пожежний робот до усунення цієї неузгодженості, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, а його амплітуду адаптують до площі вогнища загоряння. Недоліком такого способу гасіння пожежі є його недостатня загальна ефективність через те, що оптимальна відстань між мобільним роботом та осередком горіння визначається по величині теплового потоку, яка вимірюється зі значною потенційною похибкою, що обумовлена сумарною похибкою вимірювання кожної з температур на відповідних поверхнях допоміжної вимірювальної пластини, яка повинна розміщуватися у зоні мобільного робота, та залежить від напряму теплового потоку при його вимірюванні. Крім того зниження ефективності відбувається за рахунок циклічної зміни кута розпилення вогнегасної речовини в горизонтальній площині, яка не забезпечує одночасну подачу вогнегасної речовини до всієї площі вогнища загорання. Вказані недоліки не дозволяють точно визначити оптимальну відстань між мобільним роботом та осередком горіння і забезпечити одночасну подачу вогнегасної речовини до всієї площі вогнища загорання, що в цілому збільшує потрібний час гасіння, витрату вогнегасної речовини та, в окремих випадках, можуть призводити до виходу пожежного роботу із ладу за рахунок перевищення допустимого для нього рівня теплового робочого режиму, та його непрацездатності щодо гасіння пожежі в цілому. В основу технічного рішення поставлено задачу підвищення загальної ефективності гасіння пожежі із використанням мобільних роботів. Зазначена задача вирішується за рахунок того, що в способі гасіння пожежі мобільнимроботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, переміщують мобільний робот в робочу позицію і здійснюють подачу вогнегасної речовини до осередку горіння, який відрізняється тим, що вимірюють і контролюють не тепловий потік, а температуру від осередку горіння, що оточує безпосередньо мобільний робот, порівнюють цю величину температури з величиною, яка відповідає критичній експлуатаційний температурі мобільного робота, та при наявності неузгодженості між ними переміщують пожежний робот до усунення цієї температурної неузгодженості. Кут розпилу вогнегасної речовини не змінюють циклічно, а фіксують у напряму вздовж осі переміщення мобільного робота та встановлюють фіксовану величину кута діаграми спрямованості струменя розпилу вогнегасної речовини в горизонтальній площині, при цьому величину кута діаграми спрямованості струменя розпилу вогнегасної речовини адаптують до площі осередку горіння та відстані між вогнищем загоряння і мобільним роботом. Результат, який може бути одержаний при реалізації технічного рішення, що пропонується, полягає в тому, що внаслідок вимірювання та контролю температури від осередку горіння в середовищі, що оточує безпосередньо мобільний робот, можливе більш точне визначення та 1 UA 122802 U 5 10 15 20 25 30 35 40 45 50 55 забезпечення оптимальної відстані між мобільним роботом та осередком горіння, а фіксація кута розпилу вогнегасної речовини у напряму вздовж осі переміщення мобільного робота та адаптація величини кута діаграми спрямованості струменя розпилу вогнегасної речовини до площі осередку горіння і відстані між вогнищем загоряння і мобільним роботом, забезпечують одночасну подачу вогнегасної речовини до всієї площі осередку горіння, що в цілому зменшує час гасіння пожежі, витрату вогнегасної речовини та дозволяє підвищити загальну ефективність гасіння пожежі мобільним роботом з урахуванням збереження його високий надійності та працездатності. На кресленні зображена схема гасіння пожежі із використанням мобільного робота, де зображено: 1 - площа осередку горіння; 2 - мобільний робот у положенні гасіння пожежі; 3 початкове положення мобільного робота відносно площі осередку горіння 1 (зображено штриховою лінією); r - еквівалентний радіус осередку горіння; α - кут діаграми спрямованості струменя розпилу вогнегасної речовини на відстані ℓ для величини r радіусу площі осередку горіння. Спосіб гасіння пожежі мобільним роботом здійснюється наступним чином. Робот знаходиться в положенні 3, яке позначене штриховою лінією. В цьому положенні виявляють небезпечні чинники пожежі, визначають координати, площу пожежі, а також відстань до неї. Одночасно з цим, вимірюють та контролюють температуру в середовищі, що безпосередньо оточує мобільний робот, від осередку горіння t, порівнюють цю величину з температурою tкp, яка є критичною для забезпечення надійної експлуатації мобільного робота. Якщо виконується умова t
ДивитисяДодаткова інформація
Автори англійськоюPospielov Borys Borysovych, Andronov Volodymyr Anatoliiovych, Rybka Yevhenii Oleksiiovych, Deineko Natalia Viktorivna
Автори російськоюПоспелов Борис Борисович, Андронов Владимир Анатолиевич, Рыбка Евгений Алексеевич, Дейнеко Наталья Викторовна
МПК / Мітки
Мітки: мобільним, пожежі, роботом, спосіб, гасіння
Код посилання
<a href="https://ua.patents.su/6-122802-sposib-gasinnya-pozhezhi-mobilnim-robotom.html" target="_blank" rel="follow" title="База патентів України">Спосіб гасіння пожежі мобільним роботом</a>
Спосіб гасіння пожежі мобільним роботом
Номер патенту: 119615
Опубліковано: 25.09.2017
Автори: Рибка Євгеній Олексійович, Поспєлов Борис Борисович, Андронов Володимир Анатолійович, Дейнеко Наталя Вікторівна
Мітки: мобільним, пожежі, роботом, гасіння, спосіб
Формула / Реферат:
Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, контролюють величину теплового потоку від осередку горіння, порівнюють з величиною, яка відповідає граничним тепловим характеристикам мобільного робота, при наявності неузгодженості між ними змінюють положення робота до усунення цієї неузгодженості, переміщують робот в...
Спосіб гасіння пожежі мобільним роботом
Номер патенту: 120390
Опубліковано: 25.10.2017
Автори: Поспєлов Борис Борисович, Рибка Євгеній Олексійович, Андронов Володимир Анатолійович, Дейнеко Наталя Вікторівна
МПК: A62C 37/00, A62C 3/00
Мітки: роботом, гасіння, спосіб, пожежі, мобільним
Формула / Реферат:
Спосіб гасіння пожежі мобільним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, здійснюють подачу вогнегасної речовини до осередку горіння, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, амплітуду кута розпилу вогнегасної речовини адаптують до площі вогнища загоряння, який відрізняється тим, що вимірюють та контролюють температуру...
Спосіб гасіння пожежі мобільним пожежним роботом
Номер патенту: 114600
Опубліковано: 10.03.2017
Автори: Собина Віталій Олександрович, Абрамов Юрій Олексійович, Кривцова Валентина Іванівна
МПК: A62C 3/00
Мітки: спосіб, мобільним, роботом, гасіння, пожежі, пожежним
Формула / Реферат:
Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу вогнища загоряння та відстань до нього, переміщують пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до вогнища загоряння, який відрізняється тим, що контролюють величину теплового потоку від вогнища загоряння, порівнюють цю величину із апріорі заданою, при наявності...
Спосіб гасіння пожежі мобільним пожежним роботом
Номер патенту: 121077
Опубліковано: 27.11.2017
Автори: Собина Віталій Олександрович, Тищенко Євгеній Олександрович, Абрамов Юрій Олексійович
МПК: A62C 3/00, A62C 37/00
Мітки: пожежі, мобільним, спосіб, роботом, гасіння, пожежним
Формула / Реферат:
1. Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають параметри вогнища загоряння, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот до цього вогнища і контролюють його параметри, який відрізняється тим, що орієнтують лафетний ствол мобільного пожежного робота на вогнище загоряння, вимірюють відстань до вогнища загоряння, по...
Система перенесення і метання вибухових засобів мобільним роботом

Номер патенту: 115592
Опубліковано: 27.11.2017
Автор: Дудек Лукаш
МПК: F42D 1/02, B25J 5/04, F41F 7/00, F41H 7/00, B25J 9/04
Мітки: вибухових, перенесення, засобів, метання, роботом, система, мобільним
Формула / Реферат:
Система перенесення і метання вибухових засобів мобільним роботом, зокрема малим двоколісним роботом, яка відрізняється тим, що вибуховий заряд закріплено до корпусу робота (17) за допомогою хомута (7) зі штифтом (6), а обладнання метання вибухового заряду являє собою ригельно-храповий механізм, що включає корпус (1), в якому розміщений пусковий ригель (2) з можливістю переміщення, звільнення якого звільняє викидач, що складається зі штифта...
Попередній патент: Спосіб гумування металевих виробів
Наступний патент: Спосіб одержання комбінованої рослинної субстанції з гіпоглікемічною дією
Випадковий патент: Пристрій для транспортування і/або зберігання радіоактивних матеріалів та пристрій для забезпечення екранування випромінювання радіоактивних матеріалів