Система керування рухомою телекамерою
Номер патенту: 15621
Опубліковано: 17.07.2006
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович




Формула / Реферат
Система керування рухомою телекамерою, що містить задатчик положення телекамери, блок вимірювання неузгодженості, послідовно з'єднані підсилювач, двигун з редуктором, вихід якого є виходом системи, і датчик кута повороту телекамери, підключений до першого входу блока вимірювання неузгодженості, перший перемикач режимів, джерело еталонної напруги, перший алгебраїчний суматор і датчик відстані, яка відрізняється тим, що введено перший і другий інтегратори, керуючі входи яких з'єднані із сигнальним входом першого інтегратора, керуючими входами першого й другого блоків пам'яті та виходом першого перемикача режимів роботи, перший, другий і третій помножувачі, перший і другий блоки ділення, другий і третій алгебраїчні суматори, перший синусний, другий косинусний і третій арктангенсний функціональні перетворювачі, комутатор, з'єднаний першим сигнальним входом з виходом задатчика положення телекамери, а виходом - із другим входом блока вимірювання неузгодженості, датчик швидкості, вихід якого підключений до сигнального входу другого інтегратора, і другий перемикач режимів, вихід якого з'єднаний з керуючими входами комутатора, третього й четвертого блоків пам'яті, а вхід - з виходом джерела еталонної напруги й входом першого перемикача режимів, вихід датчика положення телекамери підключений до входів першого синусного й другого косинусного функціональних перетворювачів, вихід датчика відстані з'єднаний з першими входами першого й другого помножувачів, вихід першого інтегратора підключений до сигнального входу четвертого блока пам'яті й першого входу третього помножувача, другий вхід якого з'єднаний з виходом першого блока ділення, другий вхід першого помножувача з'єднаний з виходом першого синусного функціонального перетворювача, а вихід - із сигнальними входами першого й третього блоків пам'яті, другий вхід другого помножувача підключений до виходу другого косинусного функціонального перетворювача, а вихід - до сигнального входу другого блока пам'яті, вихід якого з'єднаний із прямим входом другого суматора, підключеного виходом до входу діленого другого блока ділення, а інвертувальним входом - до виходу другого інтегратора, перший суматор підключений інвертувальним входом до виходу третього блока пам'яті, прямим входом - до виходу першого блока пам'яті і до прямого входу третього суматора, а виходом - до входу дільника першого блока ділення, вихід другого блока ділення через третій арктангенсний функціональний перетворювач з'єднаний із другим сигнальним входом комутатора, вихід третього помножувача підключений до інвертувального входу третього суматора, вихід якого з'єднаний із входом дільника другого блока ділення, причому вихід блока вимірювання неузгодженості підключений до входу підсилювача, а вихід четвертого блока пам'яті - до входу діленого першого блока ділення.
Текст
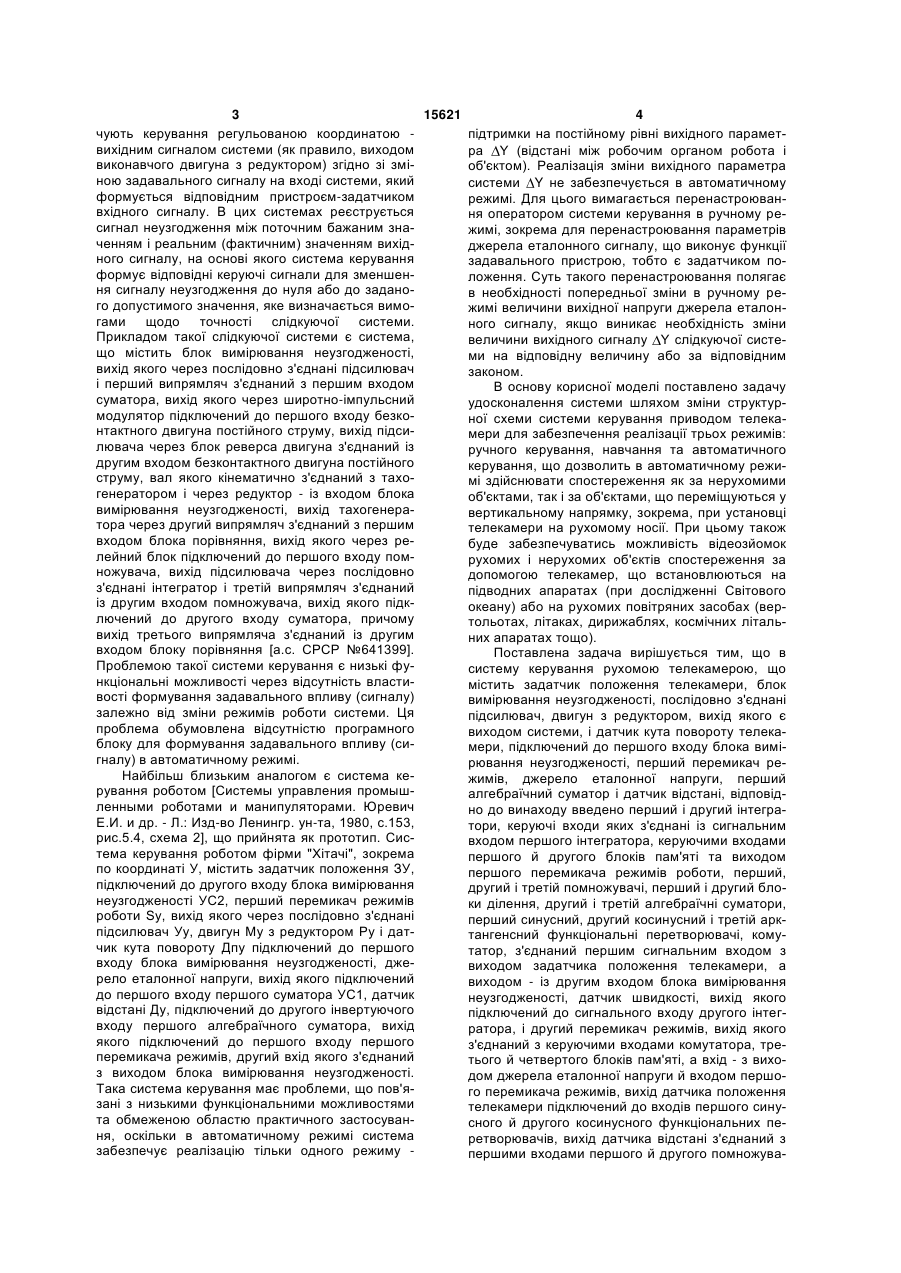
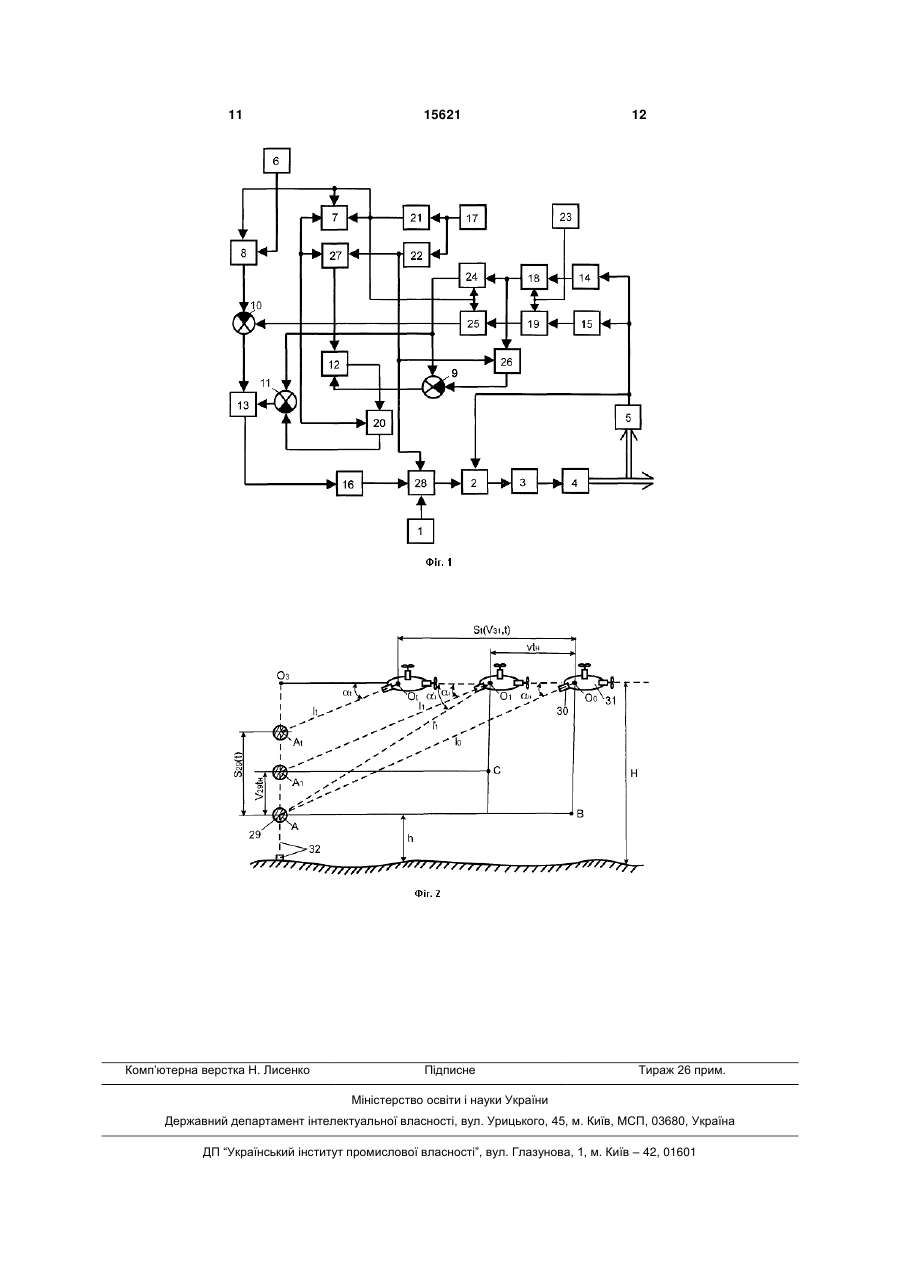
Система керування рухомою телекамерою, що містить задатчик положення телекамери, блок вимірювання неузгодженості, послідовно з'єднані підсилювач, двигун з редуктором, вихід якого є виходом системи, і датчик кута повороту телекамери, підключений до першого входу блока вимірювання неузгодженості, перший перемикач режимів, джерело еталонної напруги, перший алгебраїчний суматор і датчик відстані, яка відрізняється тим, що введено перший і другий інтегратори, керуючі входи яких з'єднані із сигнальним входом першого інтегратора, керуючими входами першого й другого блоків пам'яті та виходом першого перемикача режимів роботи, перший, другий і третій помножувачі, перший і другий блоки ділення, другий і третій алгебраїчні суматори, перший синусний, другий косинусний і третій арктангенсний функціональні перетворювачі, комутатор, з'єднаний першим сигнальним входом з виходом задатчика положення телекамери, а виходом - із другим входом блока вимірювання неузгодженості, датчик швидкості, вихід якого підключений до сигнального входу другого інтегратора, і другий перемикач режимів, вихід якого з'єднаний з керуючими входами комутатора, третього й четвертого блоків пам'яті, а вхід - з вихо U 2 UA 1 3 15621 4 чують керування регульованою координатою підтримки на постійному рівні вихідного параметвихідним сигналом системи (як правило, виходом ра Y (відстані між робочим органом робота і виконавчого двигуна з редуктором) згідно зі зміоб'єктом). Реалізація зміни вихідного параметра ною задавального сигналу на вході системи, який системи Y не забезпечується в автоматичному формується відповідним пристроєм-задатчиком режимі. Для цього вимагається перенастроюванвхідного сигналу. В цих системах реєструється ня оператором системи керування в ручному ресигнал неузгодження між поточним бажаним знажимі, зокрема для перенастроювання параметрів ченням і реальним (фактичним) значенням вихідджерела еталонного сигналу, що виконує функції ного сигналу, на основі якого система керування задавального пристрою, тобто є задатчиком поформує відповідні керуючі сигнали для зменшенложення. Суть такого перенастроювання полягає ня сигналу неузгодження до нуля або до заданов необхідності попередньої зміни в ручному рего допустимого значення, яке визначається виможимі величини вихідної напруги джерела еталонгами щодо точності слідкуючої системи. ного сигналу, якщо виникає необхідність зміни Прикладом такої слідкуючої системи є система, величини вихідного сигналу Y слідкуючої систещо містить блок вимірювання неузгодженості, ми на відповідну величину або за відповідним вихід якого через послідовно з'єднані підсилювач законом. і перший випрямляч з'єднаний з першим входом В основу корисної моделі поставлено задачу суматора, вихід якого через широтно-імпульсний удосконалення системи шляхом зміни структурмодулятор підключений до першого входу безконої схеми системи керування приводом телекантактного двигуна постійного струму, вихід підсимери для забезпечення реалізації трьох режимів: лювача через блок реверса двигуна з'єднаний із ручного керування, навчання та автоматичного другим входом безконтактного двигуна постійного керування, що дозволить в автоматичному режиструму, вал якого кінематично з'єднаний з тахомі здійснювати спостереження як за нерухомими генератором і через редуктор - із входом блока об'єктами, так і за об'єктами, що переміщуються у вимірювання неузгодженості, вихід тахогенеравертикальному напрямку, зокрема, при установці тора через другий випрямляч з'єднаний з першим телекамери на рухомому носії. При цьому також входом блока порівняння, вихід якого через ребуде забезпечуватись можливість відеозйомок лейний блок підключений до першого входу помрухомих і нерухомих об'єктів спостереження за ножувача, вихід підсилювача через послідовно допомогою телекамер, що встановлюються на з'єднані інтегратор і третій випрямляч з'єднаний підводних апаратах (при дослідженні Світового із другим входом помножувача, вихід якого підкокеану) або на рухомих повітряних засобах (верлючений до другого входу суматора, причому тольотах, літаках, дирижаблях, космічних літальвихід третього випрямляча з'єднаний із другим них апаратах тощо). входом блоку порівняння [а.с. СРСР №641399]. Поставлена задача вирішується тим, що в Проблемою такої системи керування є низькі фусистему керування рухомою телекамерою, що нкціональні можливості через відсутність властимістить задатчик положення телекамери, блок вості формування задавального впливу (сигналу) вимірювання неузгодженості, послідовно з'єднані залежно від зміни режимів роботи системи. Ця підсилювач, двигун з редуктором, вихід якого є проблема обумовлена відсутністю програмного виходом системи, і датчик кута повороту телекаблоку для формування задавального впливу (симери, підключений до першого входу блока вимігналу) в автоматичному режимі. рювання неузгодженості, перший перемикач реНайбільш близьким аналогом є система кежимів, джерело еталонної напруги, перший рування роботом [Системы управления промышалгебраїчний суматор і датчик відстані, відповідленными роботами и манипуляторами. Юревич но до винаходу введено перший і другий інтеграΕ.И. и др. - Л.: Изд-во Ленингр. ун-та, 1980, с.153, тори, керуючі входи яких з'єднані із сигнальним рис.5.4, схема 2], що прийнята як прототип. Сисвходом першого інтегратора, керуючими входами тема керування роботом фірми "Хітачі", зокрема першого й другого блоків пам'яті та виходом по координаті У, містить задатчик положення ЗУ, першого перемикача режимів роботи, перший, підключений до другого входу блока вимірювання другий і третій помножувачі, перший і другий блонеузгодженості УС2, перший перемикач режимів ки ділення, другий і третій алгебраїчні суматори, роботи Sy, вихід якого через послідовно з'єднані перший синусний, другий косинусний і третій аркпідсилювач Уу, двигун Му з редуктором Ру і даттангенсний функціональні перетворювачі, комучик кута повороту Дпу підключений до першого татор, з'єднаний першим сигнальним входом з входу блока вимірювання неузгодженості, джевиходом задатчика положення телекамери, а рело еталонної напруги, вихід якого підключений виходом - із другим входом блока вимірювання до першого входу першого суматора УС1, датчик неузгодженості, датчик швидкості, вихід якого відстані Ду, підключений до другого інвертуючого підключений до сигнального входу другого інтегвходу першого алгебраїчного суматора, вихід ратора, і другий перемикач режимів, вихід якого якого підключений до першого входу першого з'єднаний з керуючими входами комутатора, треперемикача режимів, другий вхід якого з'єднаний тього й четвертого блоків пам'яті, а вхід - з вихоз виходом блока вимірювання неузгодженості. дом джерела еталонної напруги й входом першоТака система керування має проблеми, що пов'яго перемикача режимів, вихід датчика положення зані з низькими функціональними можливостями телекамери підключений до входів першого синута обмеженою областю практичного застосувансного й другого косинусного функціональних пеня, оскільки в автоматичному режимі система ретворювачів, вихід датчика відстані з'єднаний з забезпечує реалізацію тільки одного режиму першими входами першого й другого помножува 5 15621 6 чів, вихід першого інтегратора підключений до автоматично формує керуючий сигнал U*(t) за сигнального входу четвертого блока пам'яті й рахунок додаткового введення до складу системи першого входу третього помножувача, другий другого перемикача режимів, комутатора, третьовхід якого з'єднаний з виходом першого блока го блока пам'яті, третього блока множення, другоділення, другий вхід першого помножувача з'єдго суматора, другого блока ділення та арктангеннаний з виходом першого синусного функціонасового функціонального перетворювача, льного перетворювача, а вихід - із сигнальними забезпечує в автоматичному режимі відповідний входами першого й третього блоків пам'яті, друповорот телекамери для спостереження за об'єкгий вхід другого помножувача підключений до том з урахуванням параметрів руху як самого виходу другого косинусного функціонального пеоб'єкта, так і рухомого носія, на якому встановлеретворювача, а вихід - до сигнального входу друна телекамера. Система керування рухомою тегого блока пам'яті, вихід якого з'єднаний із прялекамерою може знайти широке застосування в мим входом другого суматора, підключеного авіатехніці та у підводній техніці при обладнанні виходом до входу діленого другого блока діленнауково-дослідних та туристичних підводних апаня, а інвертуючим входом - до виходу другого ратів або вертольотів керованими телекамерами інтегратора, перший суматор підключений інверабо акустичними засобами. туючим входом до виходу третього блока пам'яті, На Фіг.1 представлена функціональна схема прямим входом - до виходу першого блока пам'ясистеми керування рухомою телекамерою, ті і до прямого входу третього суматора, а вихоа Фіг.2 схематично ілюструє принцип роботи дом - до входу дільника першого блока ділення, системи. вихід другого блока ділення через третій арктанДо складу системи керування рухомою телегенсний функціональний перетворювач з'єднаний камерою входять (Фіг.1) задатчик 1 положення, із другим сигнальним входом комутатора, вихід блок вимірювання 2 неузгодженості, підсилювач третього помножувача підключений до інвертуюЗ, двигун 4 з редуктором, датчик 5 положення, чого входу третього суматора, вихід якого з'єднадатчик 6 швидкості, перший 7 і другий 8 інтеграний із входом дільника другого блока ділення, тори, перший 9, другий 10 і третій 11 алгебраїчні причому вихід блока вимірювання неузгодженості суматори, перший 12 і другий 13 блоки ділення, підключений до входу підсилювача, а вихід четперший синусний 14, другий косинусний 15 і тревертого блока пам'яті - до входу діленого першотій арктангенсний 16 функціональні перетворюго блока ділення. вачі, джерело 17 еталонної напруги, перший 18, В запропонованій системі керування на віддругий 19 і третій 20 помножувачі, перший 21 і мінність від прототипу забезпечено три режими другий 22 перемикачі режимів, датчик 23 відстані, роботи (ручний, навчальний та автоматичний) і перший 24, другий 25, третій 26 і четвертий 27 змінено алгоритм формування керуючого сиблоки пам'яті, а також комутатор 28. В системі гналу U*(t), що надає системі можливість відслідкерування рухомою телекамерою (Фіг.1) підсилюковувати як за нерухомим об'єктом, так і за руховач 3, двигун 4 з редуктором і датчик 5 положенмим об'єктом спостереження, який перебуває в ня телекамери, підключений до першого входу режимі вертикального підйому. При цьому, в блока вимірювання 2 неузгодженості, з'єднані структуру системи керування в порівнянні з пропослідовно. Вихід двигуна 4 з редуктором є вихототипом додатково введено відповідні електронні дом системи. Крім того, керуючі входи першого 7 блоки, в тому числі перший та другий інтегратоі другого 8 інтеграторів з'єднані із сигнальним ри, перший, другий та четвертий блоки пам'яті, входом першого 7 інтегратора, керуючими вхоперший і третій суматори, перший блок ділення, дами першого 24 і другого 25 блоків пам'яті та з перший перемикач режимів та джерело еталонвиходом першого 21 перемикача режимів роботи. ної напруги, які здійснюють поточну оцінку швидПерший сигнальний вхід комутатора 28 з'єднаний кості руху об'єкта спостереження при переведенз виходом задатчика 1 положення телекамери, а ні системи керування в короткочасний режим другий вхід блока вимірювання 2 неузгодженості «навчання». Отже, введені конструктивні зміни в з виходом комутатора 28. Вихід датчика 6 швидструктуру системи керування надають їй нові кості підключений до сигнального входу другого 8 властивості, зокрема можливість отримувати інінтегратора. Вихід другого перемикача 22 режиформацію про параметри руху об'єкта спостеремів з'єднаний з керуючими входами комутатора ження в реальному масштабі часу. Удосконалена 28, третього 26 і четвертого 27 блоків пам'яті, а структура системи керування рухомою телекамевхід - з виходом джерела 17 еталонної напруги та рою, що могла б вирішувати завдання автомативходом першого перемикача 21 режимів. Вихід чного спостереження як за стаціонарним (нерудатчика 5 положення телекамери підключений до хомим), так і за динамічним (рухомим) об'єктом з входів першого синусного 14 і другого косинуснореалізацією режиму попереднього навчання, і го 15 функціональних перетворювачів, вихід датстановить винахідницький задум, що має в порівчика 23 відстані з'єднаний з першими входами нянні з прототипом новизну та істотні відмінності. першого 18 і другого 19 помножувачів, вихід перНа відмінність від прототипу відповідний канал шого інтегратора 7 підключений до сигнального запропонованої системи керування, що реалізує входу четвертого 27 блока пам'яті та першого режим навчання, дозволяє оцінювати стан та входу третього 20 помножувача, другий вхід якопараметри руху об'єкта спостереження (у випадго з'єднаний з виходом першого 12 блоку ділення. ках коли об'єкт є нерухомим або переміщується у Другий вхід першого 18 помножувача з'єднаний з вертикальній площині з певною швидкістю), а виходом першого синусного 14 функціонального запропонована структура каналу керування, що перетворювача, а вихід - із сигнальними входами 7 15621 8 першого 24 і третього 26 блоків пам'яті. Другий Під час роботи оператор може виявити об'єкт вхід другого 19 помножувача підключений до виспостереження 29 і прийняти рішення щодо неходу другого косинусного 15 функціонального обхідності його більш детального вивчення. У перетворювача, а вихід - до сигнального входу загальному випадку об'єкт спостереження 29 модругого 25 блока пам'яті, вихід якого з'єднаний із же перебувати на різній відстані від ґрунту (напрямим входом другого 10 суматора, підключеноприклад утримуватися на відстані h за допомогою го виходом до входу діленого другого 13 блока якірного зв'язку 32) або виринати, тобто переміділення, а інвертуючим входом - до виходу другощатися вгору по вертикалі відносно ґрунту. Для го 8 інтегратора. Перший 9 суматор підключений забезпечення детального спостереження за об'єінвертуючим входом до виходу третього 26 блока ктом 29 операторові необхідно стабілізувати попам'яті, прямим входом - до виходу першого 24 ложення апарата 31 у просторі, не випускаючи блока пам'яті та до прямого входу третього 11 об'єкт спостереження 29 з поля зору телекамери суматора, а виходом - до входу дільника першого 30. Тобто потрібно забезпечити багатофункціоблока 12 ділення. Вихід другого 13 блока ділення нальний режим одночасної маніпуляції пристрочерез третій арктангенсний 16 функціональний ями керування за швидкістю рухом апарата 31, перетворювач з'єднаний із сигнальним входом задавальними пристроями керування положенкомутатора 28, вихід третього 20 помножувача ням телекамери 30, а в деяких випадках - провепідключений до інвертуючого входу третього 11 дення фотозйомок об'єкта спостереження 29. У суматора, вихід якого з'єднаний із входом дільни"ручному режимі" датчик 6 швидкості формує ка другого 13 блоку ділення. Вихід блока вимірюсигнал, що відповідає поточній швидкості V руху вання 2 неузгодженості підключений до входу апарата 31, а датчик 23 - сигнал, що відповідає підсилювача 3, а вихід четвертого блока 27 павідстані l до об'єкта спостереження 29. При цьому м'яті - до входу діленого першого блока 12 діленна входи синусного 14 і косинусного 15 функціоня. Задатчик положення 1 може бути виконаний, нальних перетворювачів з виходу датчика 5 понаприклад, у вигляді регульованого джерела наложення телекамери надходить сигнал , що пруги, блок вимірювання 2 неузгодженості - у відповідає поточному кутовому положенню телевигляді алгебраїчного суматора, а інші блоки, що камери 30 відносно горизонту OO3. Вихідним сигвходять до складу системи керування рухомою налом датчика 5 положення телекамери 30 є нателекамерою, є типовими. На Фіг.2 показані пруга, що пропорційна поточному значенню кута об'єкт спостереження 29, поздовжня вісь телекаповороту а телекамери 30. Вихідний сигнал lsin мери 30, рухомий носій (апарат) 31 та якірний першого помножувача 18 безупинно надходить зв'язок 32 (показаний пунктирною лінією). Датчик на сигнальний вхід першого блока пам'яті 24, а 23 відстані може бути реалізований у вигляді вихідний сигнал lcos другого помножувача 19 ехолота або локатора. Рухомим носієм 31 телена сигнальний вхід другого блока пам'яті 25. Сискамери 30 може бути, наприклад, підводний апатема керування рухомою телекамерою надалі рат (вертоліт). працює послідовно у двох режимах - режимі наЗапропонована система керування рухомою вчання та режимі спостереження. Режим навчантелекамерою працює таким чином. ня є необхідним для визначення (фіксації) параПри русі апарата 31 зі швидкістю V над ґрунметрів, за допомогою яких можна визначити том на висоті Η оператор телекамери 30 за дошвидкість виринання V об'єкта спостереження помогою задатчика 1 керує її кутовим положен29. Для забезпечення навчання системи операням (Фіг.2) відносно горизонта. При цьому тор у момент часу t0 переводить перший 21 пеінтегратори 7 й 8 знаходяться в нульовому стані, ремикач режимів у положення "Режим навчання". оскільки перший перемикач 21 режиму перебуває При цьому вихідний сигнал джерела 17 еталонної в положенні "Ручний режим", тобто вихідний сигнапруги надходить на сигнальний вхід першого нал джерела еталонної напруги 17 на керуючі інтегратора 7, а також на керуючі входи обох інвходи інтеграторів 7 та 8 не подається. Другий 22 теграторів 7, 8 та першого 24 і другого 25 блоків перемикач режиму також перебуває в положенні пам'яті. На виході першого 24 блока пам'яті фор"Ручний режим". Слідкуюча система працює трамується сигнал l0 sin 0=const, що відповідає відсдиційно: вихідний сигнал зад за датчика полотані OВ по вертикалі (Фіг.2), а на виході другого ження 1 надходить через комутатор 28 на другий 25 блока пам'яті - сигнал l0cos 0=const, що відповхід блока вимірювання 2 неузгодженості, на певідає відстані AB по горизонталі між апаратом 31 рший вхід якого надходить сигнал а з виходу датй об'єктом 29. Перший інтегратор 7 починає фочика 5 положення телекамери 30. На виході блормувати на виході сигнал t у вигляді напруги, що ка вимірювання 2 неузгодженості формується відповідає поточному часу t. Другий інтегратор 8 різниця сигналів = зад- , що потім надходить починає інтегрувати швидкість V31(t) апарата 31 і на вхід підсилювача 3. Вал двигуна 4, що керуt ється вихідною напругою підсилювача 3, поверV31( t )dt , що відпоформує на виході сигнал S t тається таким чином, що різниця сигналів задат0 чика положення 1 і датчика 3 положення відає відстані, пройденій апаратом 31 по горизотелекамери Лес, сформована на виході блока нталі на момент часу t, де t - поточний час, що вимірювання 2 неузгодженості, прагне до мінімапройшов з моменту включення першого 21 перельного значення, величина якого визначається микача режимів (t0=0). Для забезпечення програвластивостями навантаження двигуна 4 і підсимного спостереження за об'єктом 29 в автоматилювача 3. При цьому перший сигнальний вхід чному режимі оператор у момент часу tH (момент комутатора 28 з'єднаний з виходом задатчика 1. закінчення процесу навчання системи керування) 9 15621 10 переводить другий 22 перемикач режимів у поЦей сигнал (l0cos 0-St) надходить на вхід діленоложення "Автоматичний режим: програмне спого другого блоку ділення 13, на вхід дільника якостереження". При цьому вихідний сигнал джерего подається вихідний сигнал третього суматора ла еталонної напруги 17 надходить на керуючі 11. На виході другого 13 блоку ділення автомативходи комутатора 28, третього 26 і четвертого 27 чно формується сигнал блоків пам'яті. На виході третього 26 блока пам'яl0 sin 0 l0 sin 0 l1 sin 1 / tH t , що перетворюті формується сигнал l1sin 1=const, що відповідає l0 cos 0 S t відстані O1С по вертикалі між апаратом 31 та ється арктангенсовым 16 функціональним перетоб'єктом 29 на момент часу tH. При цьому вириворювачем у сигнал наючий об'єкт спостереження 29 у момент часу tH l0 sin 0 l0 sin 0 l1 sin 1 / tH t перебуває у точці А1, а апарат 31 з телекамерою U * ( t ) arctg . 30 - у точці О1 (Фіг.2). На виході четвертого 27 l0 cos 0 S t блоку пам'яті встановлюється у вигляді напруги Цей сигнал U*(t), що саме і відповідає поточсигнал tH, що відповідає часовому інтервалу між ному (бажаному) значенню кутового положення моментами включення першого 21 і другого 22 *t телекамери 30, відпрацьовується слідкуючою перемикачів режимів, тобто відповідає часу насистемою, забезпечуючи безперервне спостеревчання системи. За час навчання tH на величину ження за об'єктом 29. Тобто саме така залежність ( 0- 1) змінюється кутове положення телекамери U*(t) потрібна для програмного спостереження за 30 в режимі ручного керування телекамерою 30 об'єктом 29 в автоматичному режимі. При цьому при безпосередній участі оператора. При роботі сигнал U*(t) надходить через комутатор 28 на системи в автоматичному режимі програмного другий сигнальний вхід блока вимірювання неспостереження на другі прямі входи першого 9 і узгодженості 2 для забезпечення керування в третього 11 суматорів надходить сигнал l0sin 0, а автоматичному режимі положенням вихідного на перший інвертуючий вхід першого суматора 9 вала двигуна 4 з редуктором, а отже і кутовим - сигнал l1sin 1. На виході першого суматора 9 положенням телекамери 30. Якщо в даному авформується сигнал (l0sin 0-lsin 1), що відповідає томатичному режимі швидкість V31(t) апарата 31 відстані АA1, яку пройшов об'єкт 30 спостереженбуде змінюватися, то буде здійснюватися відпоня при виринанні за час tH. Цей сигнал надходить відна автоматична корекція задавального сигнана вхід дільника першого блока 12 ділення, на лу U*(t), при цьому об'єкт 29 спостереження буде вхід діленого якого з виходу четвертого блока постійно залишатись в полі зору телекамери 30. пам'яті 27 надходить (у вигляді напруги) сигнал У тих випадках, коли об'єкт спостереження 29 є tH. У такий спосіб на виході першого блока 12 нерухомим, тобто утримується (фіксується) за допомогою якірного зв'язку 32 (Фіг.2), система l0 sin 0 l1 sin 1 ділення формується сигнал , що працює аналогічним чином, однак оскільки при tH цьому l0sin 0=l'1sin '1, a отже дорівнює нулю відповідає величині швидкості V29 виринання складова [(l0sin 0-l'1sin '1)/tH]t=0, то залежність об'єкта спостереження 29. На виході третього 20 U*(t) визначається як блока множення формується сигнал l0 sin 0 l1 sin 1 t , що відповідає на поточний tH момент часу t відстані АAt, тобто відстані S29(t) (Фіг.2), яку долає об'єкт 29 при виринанні з початкового моменту часу t0. Цей сигнал надходить на перший інвертуючий вхід третього 11 суматора, на виході якого формується сигнал l0 sin 0 l0 sin 0 l1 sin 1 t , що відповідає відсtH тані О3At по вертикалі між об'єктом 29 та апаратом 31 у поточний момент часу t. На другий прямий вхід другого суматора 10 надходить сигнал l0cos 0, а на перший інвертуючий вхід -сигнал t V31( t )dt . St 0 На виході другого суматора 10 формується сигнал (l0cos 0 –St), що відповідає поточній відстані O3Ot, між об'єктом 29 та апаратом 31 по горизонталі при русі апарата 31 зі швидкістю V31(t). U*' ( t ) arctg l0 sin 0 . l0 cos 0 S t Коли ж необхідність у автоматичному програмному спостереженні відпадає, то оператор переводить другий 22, а потім перший 21 перемикачі режимів у положення "Ручний режим" і система керується від задатчика положення 1. Система працює аналогічним чином і у тих випадках, коли об'єкт спостереження 29 перебуває на ґрунті (морському дні). Техніко-економічні переваги запропонованого технічного рішення полягають в значному розширенні функціональних можливостей, оскільки реалізація режиму «навчання» в системі керування рухомою телекамерою дозволяє телекамері в режимі програмного спостереження автоматично відслідковувати положення й стан об'єкта спостереження при русі носія телекамери як у стаціонарних, так і у динамічних режимах. 11 Комп’ютерна верстка Н. Лисенко 15621 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system for a movable television camera
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych
Назва патенту російськоюСистема управления подвижной телекамерой
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич
МПК / Мітки
МПК: G01S 15/00, G05B 11/40
Мітки: керування, рухомою, телекамерою, система
Код посилання
<a href="https://ua.patents.su/6-15621-sistema-keruvannya-rukhomoyu-telekameroyu.html" target="_blank" rel="follow" title="База патентів України">Система керування рухомою телекамерою</a>
Система керування
Номер патенту: 66917
Опубліковано: 15.06.2004
Автори: Чигирин Олег Трохимович, Маранов Олександр Вікторович, Чигирин Юрій Трохимович
МПК: G06F 11/16, G06F 11/00
Формула / Реферат:
Система керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом системи керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Система керування
Номер патенту: 59845
Опубліковано: 15.09.2003
Автори: Ткачук Денис Ярославович, Дрючин Віктор Гаврилович, Жиляков Віктор Іванович
МПК: G05B 13/00
Формула / Реферат:
Система керування, що містить об'єкт керування, що складається з n послідовно з'єднаних інерційних ланок, модель об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а виходом, що віднімає, - до виходу об'єкта керування, зворотну модель об'єкта керування, два підсилювачі, яка відрізняється тим, що на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а n його...
Система керування
Номер патенту: 61030
Опубліковано: 15.10.2003
Автори: Ткачук Денис Ярославович, Жиляков Віктор Іванович, Дрючин Віктор Гаврилович
МПК: G05B 13/00
Формула / Реферат:
Система керування, до складу якої входить об'єкт керування, що складається з «n» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає, - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі, яка відрізняється тим, що додатково введені «n+1» квадраторів, інтегратор і блок...
Спосіб керування літальним апаратом та зміни його аеродинамічного компонування і система керування
Номер патенту: 55253
Опубліковано: 15.03.2005
Автори: Кузьмін В'ячеслав Павлович, Комендантова Людмила Степанівна, Смішко Григорій Павлович, Сайног Максим Борисович, Яковенко Петро Олексійович, Косовенко Євген Вікторович, Семенов Леонід Антонович, Доценко Борис Іванович, Егліт Микола Олександрович
МПК: F42B 15/01
Мітки: спосіб, апаратом, літальним, аеродинамічного, компонування, зміни, система, керування
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Сайног Максим Борисович, Егліт Микола Олександрович, Комендантова Людмила Степанівна, Семенов Леонід Антонович, Кузьмін В'ячеслав Павлович, Яковенко Петро Олексійович, Смішко Григорій Павлович, Доценко Борис Іванович, Косовенко Євген Вікторович
МПК: F42B 15/01
Мітки: зміни, система, літальним, керування, компоновки, аеродинамічної, апаратом, спосіб
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Попередній патент: Спосіб оцінки ефективності лікування хворих на гіпертонічну хворобу
Наступний патент: Спосіб дослідження слухової системи людини
Випадковий патент: Обприскувач