Прямолінійно-направляючий механізм
Номер патенту: 15630
Опубліковано: 30.06.1997
Автори: Павлик Володимир Іванович, Ахтямов Альберт Мінахметович, Базовий Віктор Якович, Воробйов Віктор Костянтинович, Луговський Валерій Олександрович
Формула / Реферат
(57) 1. Прямолинейно-направляющий механизм, содержащий стойку, шарнирно связанный со стойкой одним концом кривошип, коромыслом, одним концом шарнирно связанное со стойкой и установленное с возможностью возвратно-вращательного движения, и шатун, шарнирно связанный со свободными концами кривошипа и коромысла, отличающийся тем, что механизм снабжен прямолинейной направляющей и установленным в ней с возможностью возвратно-поступательного движения ползуном, шатун выполнен в виде двуплечего рычага, плечи которого взаимно перпендикулярны и по длине равны длине коромысла, вершина шатуна шариирно связана с коромыслом, а концы шарнирно связаны с ползуном и кривошипом соответственно, прямая, проходящая через центри шарниров, связывающих кривошип и коромысло со стойкой, расположена под углом 45° к прямой, перпендикулярной продольной оси ползуна и проходящей через центр шарнира, связывающего кривошип со стойкой, а радиус кривошипа, длина рабочего хода ползуна, длина коромысла, расстояние между продольной осью ползуна и параллельной ей прямой, проходящей ,через центр шарнира, связывающего кривошип со стойкой, и расстояние между центрами шарниров, связывающих кривошип и коромысло со стойкой соотносятся между собой как 1:2,87:3,41:3,31:4.76.
2. Прямолинейно-направляющий механизм по п.1, от л и ч а ю щ и й с я тем, что подвижные соединения шатун-ползун, шатун-коромысло и шатун-кривошип выполнены в виде четырех подвижных сферических шарниров.
Текст
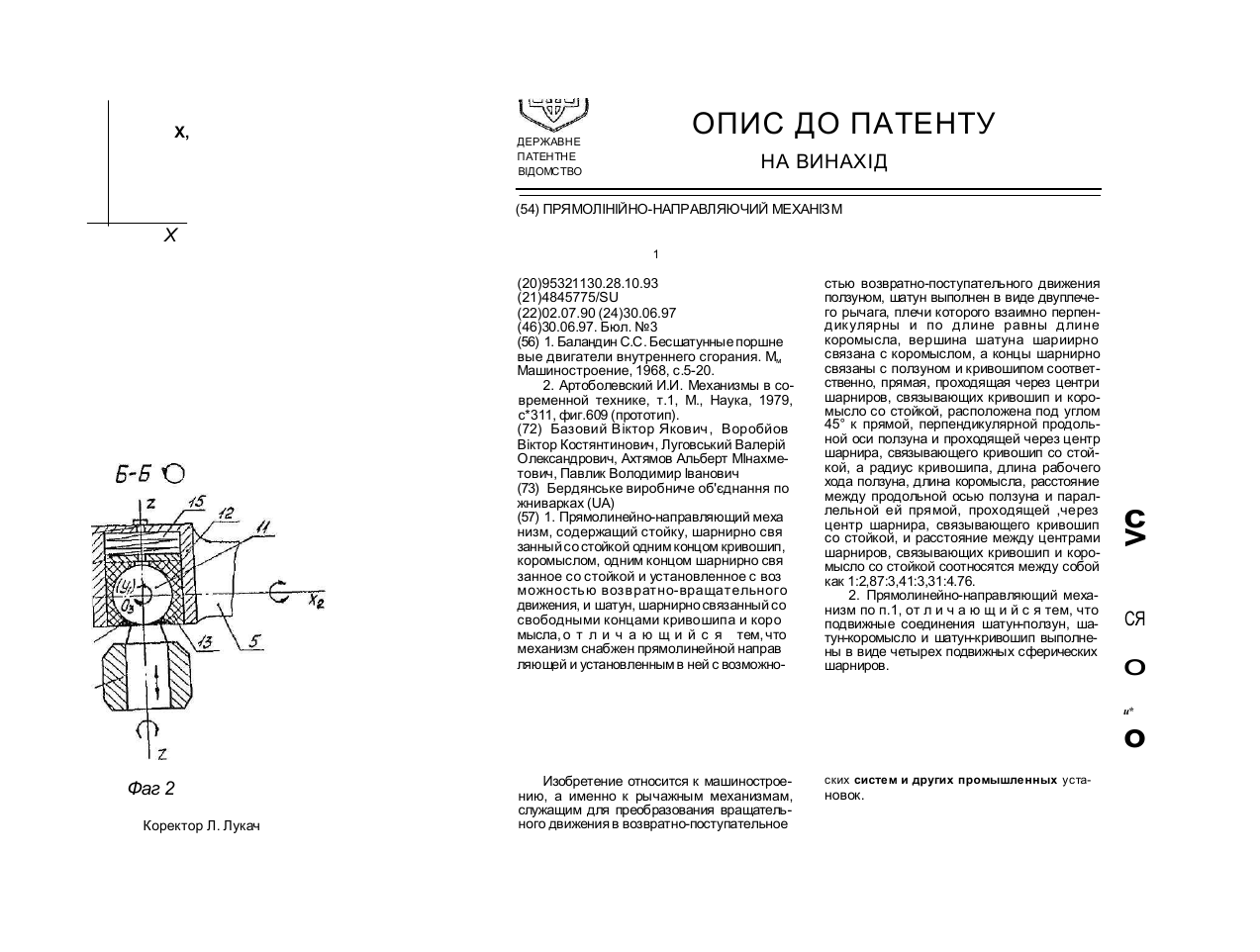
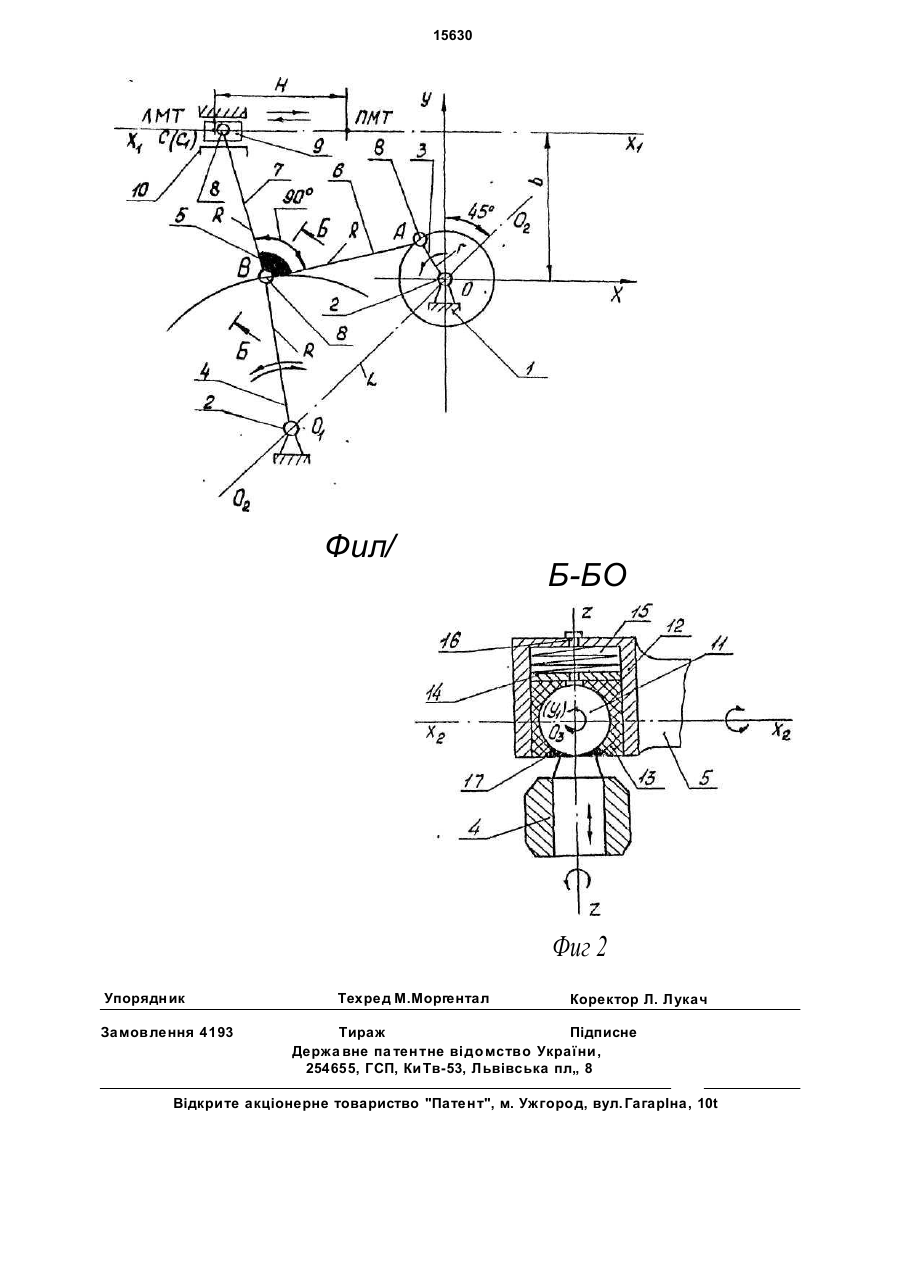
X, ОПИС ДО ПАТЕНТУ ДЕРЖАВНЕ ПАТЕНТНЕ ВІДОМСТВО НА ВИНАХІД (54) ПРЯМОЛІНІЙНО-НАПРАВЛЯЮЧИЙ МЕХАНІЗМ X 1 (20)95321130.28.10.93 (21)4845775/SU (22)02.07.90 (24)30.06.97 (46)30.06.97. Бюл. №3 (56) 1. Баландин С.С. Бесшатунные поршне вые двигатели внутреннего сгорания. Мм Машиностроение, 1968, с.5-20. 2. Артоболевский И.И. Механизмы в современной технике, т.1, М., Наука, 1979, с*311, фиг.609 (прототип). (72) Базовий Віктор Якович, Воробйов Віктор Костянтинович, Луговський Валерій Олександрович, Ахтямов Альберт МІнахметович, Павлик Володимир Іванович (73) Бердянське виробниче об'єднання по жниварках (UA) (57) 1. Прямолинейно-направляющий меха низм, содержащий стойку, шарнирно свя занный со стойкой одним концом кривошип, коромыслом, одним концом шарнирно свя занное со стойкой и установленное с воз можностью возвратно-вращательного движения, и шатун, шарнирно связанный со свободными концами кривошипа и коро мысла, о т л и ч а ю щ и й с я тем, что механизм снабжен прямолинейной направ ляющей и установленным в ней с возможно стью возвратно-поступательного движения ползуном, шатун выполнен в виде двуплечего рычага, плечи которого взаимно перпендикулярны и по длине равны длине коромысла, вершина шатуна шариирно связана с коромыслом, а концы шарнирно связаны с ползуном и кривошипом соответственно, прямая, проходящая через центри шарниров, связывающих кривошип и коромысло со стойкой, расположена под углом 45° к прямой, перпендикулярной продольной оси ползуна и проходящей через центр шарнира, связывающего кривошип со стойкой, а радиус кривошипа, длина рабочего хода ползуна, длина коромысла, расстояние между продольной осью ползуна и параллельной ей прямой, проходящей ,через центр шарнира, связывающего кривошип со стойкой, и расстояние между центрами шарниров, связывающих кривошип и коромысло со стойкой соотносятся между собой как 1:2,87:3,41:3,31:4.76. 2. Прямолинейно-направляющий механизм по п.1, от л и ч а ю щ и й с я тем, что подвижные соединения шатун-ползун, шатун-коромысло и шатун-кривошип выполнены в виде четырех подвижных сферических шарниров. с > СЯ о и* о Фаг 2 Коректор Л. Лукач Изобретение относится к машиностроению, а именно к рычажным механизмам, служащим для преобразования вращательного движения в возвратно-поступательное ских систем и других промышленных уста новок. фиг.2 - разрез по Б-Б на фиг.1. 5 Прямолинейно-направляющий меха низм, выполненный на базе плоского шар нирного четырехзвенника, содержит стойку 1, соединенный подвижно со стойкой 1 по средством цилиндрического шарнира 2 10 кривошип 3, образующий со стойкой 1 вра щательную кинематическую пару О, коро мысло 4, аналогично закрепленное в стойке 1 при помощи цилиндрического шарнира 2 (вращательная кинематическая пара Oi), 15 шатун 5, представляющий собой двуплечий (V-обрэзный) симметричный рычаг с плеча ми, образованными жестко связанными между собой стержнями G и 7, расположен ными в одной плоскости и установленными 20 друг к другу под прямым углом, к вершине (точка В) которого присоединено при помо щи универсального четырохподвижного сферического шарнира 8 коромысло 4, рас положенное вне этого угла и образующее 25 при соединении вращательную кинематиче скую пару В, служащую для компенсации в пространстве погрешностей геометриче ского расчета, изготовления и монтажа ука занных звеньев. Стержень 6, шатун 5 сооим 30 свободным концом соединен с кривошипом 3, при помощи такого же универсального шарнира 8, образуя при этом вращательную пару А, а соответственно свободный конец стержня 7 аналогично, посредством шарни- 35 ра 8, соединен с ползуном 9, установленным в прямолинейных направляющих 10 стойки 1, образуя в совокупности компенсирую щую вращательную кинематическую пару С и поступательную пару Сі. 40 Универсальный шарнир 8 включает в себя шаровой палец 11, жестко закрепленный своим цилиндрическим концом в отверстии головки коромысла 4 и подвижно установленный в несущей цилиндрической втулке 45 12 шатуна 5 при помощи охватывающих его сферическую головку двух вкладышей 13 с внутренними сферическими и наружными цилиндрическими рабочими поверхностями' с возможностью их некоторого 50 вращательного и поступательного перемещения относительно продольной и поперечной геометрических осей симметрии (х2, yi, Оз. г)подвижного соединения втулки 12, как это показано на фиг.2, подвижную направ- 55 \A .\syj \* п о ч и л и м u 1 U H R . 0 w , л иж а щ и м н а ос и вращения кривошипа 3, линия ОЮг центров шарниров 2 подвесги кривошипа 3 и коромысла 4 к стойке 1 выражается уравнением прямой у = х, иначе, линия центров О1О2 проходит через начало координат О и расположена под углом 45° к оси у (или оси х), а положение оси Х1Х1 прямолинейных направляющих 10 для перемещения ползуна 9, параллельной основной оси Оч. выражается соответственно уравнением прямой у = Ь, где ордината b есть расстояние от оси вращения кривошипа 3 по линии xixi перемещения ползуна 9, т.е. до прямой линии-траектории движения точки С, принадлежащей одновременно шатуну 5 и ползуну 9. Звенья механизма имеют следующие геометрические размеры: радиус кривошипа 3 равен г; (ОА = г), длина коромысла 4 равна R; (OiB = R), а каждый из одинаковых по длине стержней G и 7 шатуна 5 имеет ту же длину R, что и коромысло Л, (АВ « ВС = Межцентровое расстояние шарниров 2 подвески кривошипа 3 и коромысла 4 к стойке 1 равно; (OiO = L), а рабочий ход ползуна 9 (расстояние между его левой (ЛМТ) и правой (ПМТ) мертвыми точками) равен Н, причем соотношения рабочего хода Н ползуна 9, ординаты b длины R коромысла 4 и межосевого расстояния шарниров 2 подвески кривошипа 3 и коромысла 4 к радиусу г кривошипа 3 составляют соответственно: 2 07; 3,31; 3,41; 4.76; (М/г-2.87; b/r = 3,31;R/r = =3,41; L/r-4,76). Приведенные соотношения длин звеньев механизма округлены с точностью до сотых долей и при необходимости могут быть рассчитаны более точно с указанием полей допусков. Предлагаемый механизм имеет приближенно-гармонический закон движения исполнительного звена (ползуна 9), близкий к синусоидальному. Пассивные связи о механизме исключаются путем введения трех универсальных шарниров 0, обеспечивающих дополнительные степени подвижности. Стрелками на чертеже показаны направления движения звеньев мехешизма, а на фиг.2 - обьемная система координат следующим образом. При вращении к шипа 3 вокруг неподвижной оси О ци, рического шарнира 2 кинематич взаимосвязанное с кривошипом 3 коре ло 4 будет совершать возвратно-враща ное движение вокруг неподвижной ос шарнира 2, шатун 5 будет участвовать Е скопараллельном движении, причем особая точка С будет перемещаться по мой линии, совпадающей с линией xix общая ползуну 9 воэвратно-поступател движение по оси xixi прямолинейны правляющих 10 стойки 1. Все звенья г низма при этом будут перемещаться в о вертикальной плоскости хОу, или точ* плоскостях, параллельных последней, обычном плоском механизме. Благодар му, что в каждом из трех универсал шарниров 8 (кинематические пары А, В допускается некоторое осевое поступа ное смещение шарового пальца 11 ОТУ тельно оси z и ограниченное вращател движение его вокруг осей Х2, yi и z с- нач координат в точке Оз- как в вертикальной и в горизонтальной плоскостях полної компенсируются неточности геометр ского расчета линейных и угловых пара ров и отдельных конструктивных элеме звеньев и обеспечивается прямолинеї перемещение точки С шатуна 5 и ползу с чрезвычайно высокой степенью точне т.е. данный механизм превращается в цизионно точный направляющий механ служащий для преобразования вращат ного движения кривошипа 3 в возвратно ступательное движение ползуна 9. При работе механизма мертвые ті ползуна 9 и коромысла 4 не совпадай несколько смещены по фазе: раньше до гает крайних положений коромысло 4, стабильно обеспечивает плавный выхо, мертвых точек шатуна 5 при прямом и об ном ходах. При движении точки С по пря линии xixi полностью устраняется дейсі вредных боковых (тангенциальных) си; стороны шатуна 5 на ползун 9, а через следний и на стойку 1, и теоретически абсолютно нулевом значении угла давле УКРАЇНА 09) UA 15630 (із) СІ (SD5 F 16 Н 21/04 ОПИС ДО ПАТЕНТУ ДЕРЖАВНЕ ПАТЕНТНЕ ВІДОМСТВО НА ВИНАХІД (54) ПРЯМОЛІНІЙНО-НАПРАВЛЯЮЧИЙ МЕХАНІЗМ 1 (20)95321130,28.10.93 (21)4845775/SU (22)02.07,90 (24) 30.06.97 (46) 30.06.97. Бюл. № З (56) 1. Баландин С.С. Бесшатунные поршне вые двигатели внутреннего сгорания. М., Машиностроение, 1968, с.5-20. 2. Артоболевский И.И. Механизмы в современной технике, т.1, М., Наука, 1979, с
ДивитисяДодаткова інформація
Назва патенту англійськоюStraight-guide mechanism
Автори англійськоюBazovyi Viktor Yakovych, Vorobiov Viktor Kostiantynoych, Luhovskyi Valerii Oleksandrovych, Akhtiamov Albert Minakhmetovych, Pavlyk Volodymyr Ivanovych
Назва патенту російськоюПрямолинейно-направляющий механизм
Автори російськоюБазовый Виктор Яковлевич, Воробьев Виктор Константинович, Луговский Валерий Александрович, Ахтямов Альберт Минахметович, Павлик Владимир Иванович
МПК / Мітки
МПК: F16H 21/04
Мітки: прямолінійно-направляючий, механізм
Код посилання
<a href="https://ua.patents.su/6-15630-pryamolinijjno-napravlyayuchijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Прямолінійно-направляючий механізм</a>
Приводний механізм поршневого насоса

Номер патенту: 5526
Опубліковано: 28.12.1994
Автори: Воробйов Володимир Олексійович, Кульов Сергій Васильович, Садлаєв Олег Османович, Тихонов Вячеслав Петрович
МПК: F04B 9/02, F16H 21/28
Мітки: насоса, приводний, механізм, поршневого
Формула / Реферат:
(57) 1. Приводной механизм поршневого насоса, включающий приводное колесо с кривошипом, кинематически соединенным с пальцем ползуна, установленного в направляющей прямолинейного движения, отличающийся тем, что он снабжен дополнительными направляющей прямолинейного движения с ползуном и пальцем и двумя кривошипами, последние из которых жестко соединены с основным кривошипом, имеют с ним одинаковые радиусы, повернуты один относительно другого...
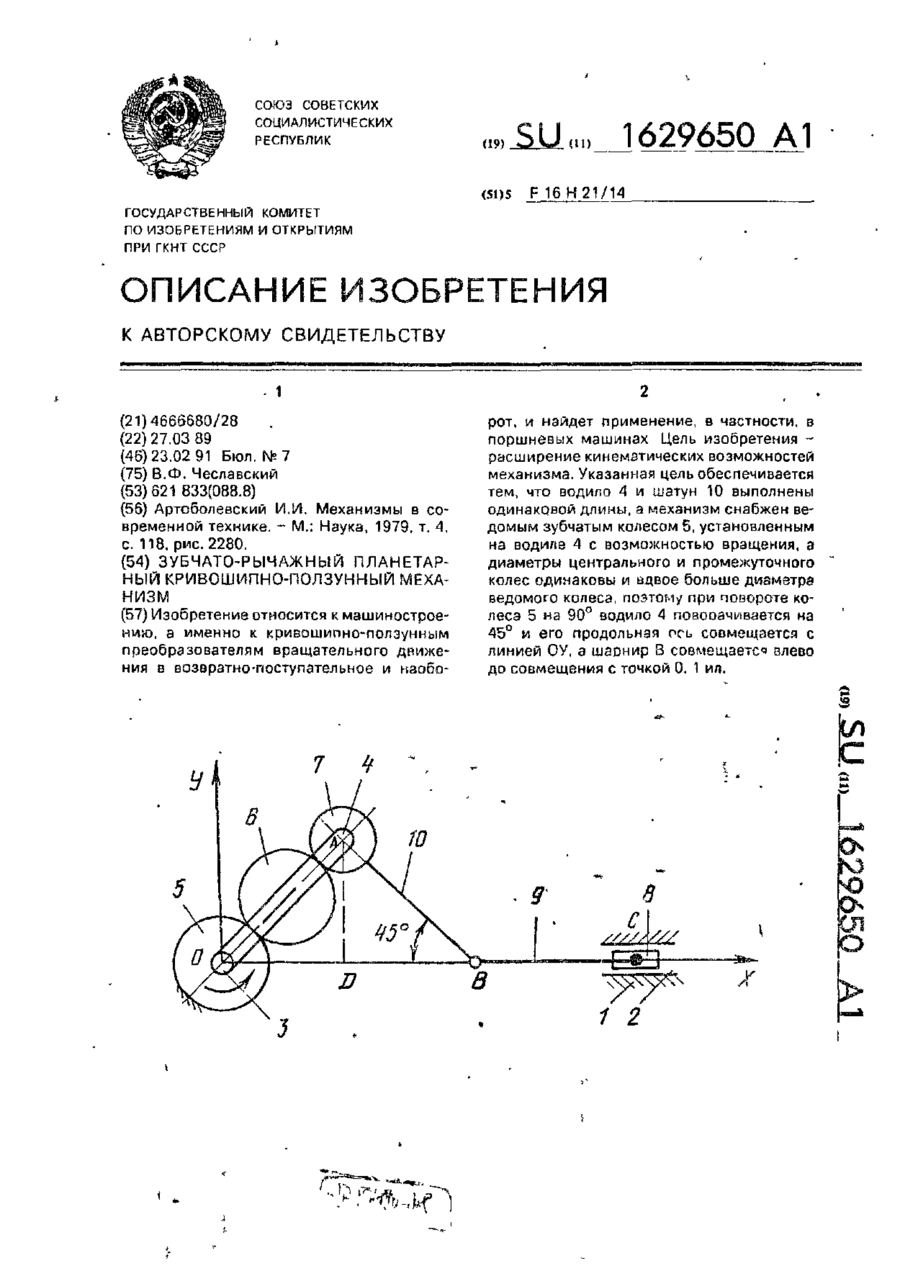
Зубчато-важільний планетарний кривошинно-повзунний механізм
Номер патенту: 6139
Опубліковано: 29.12.1994
Автор: Чеславський Володимир Федірович
МПК: F16H 21/14
Мітки: механізм, планетарний, кривошинно-повзунний, зубчато-важільний
Формула / Реферат:
Зубчато-рычажный планетарный кривошипно-ползунный механизм, содержащий основание с прямолинейной направляющей, ведущий вал с жестко закрепленным на ней водилом, ось вращения которого пересечена с продольной осью направляющей, закрепленное на основании зубчатое колесо, ось которого совмещена с осью вращения ведущего вала, установленное на водило с возможностью вращения промежуточное зубчатое колесо, входящее в зацепление с центральным...
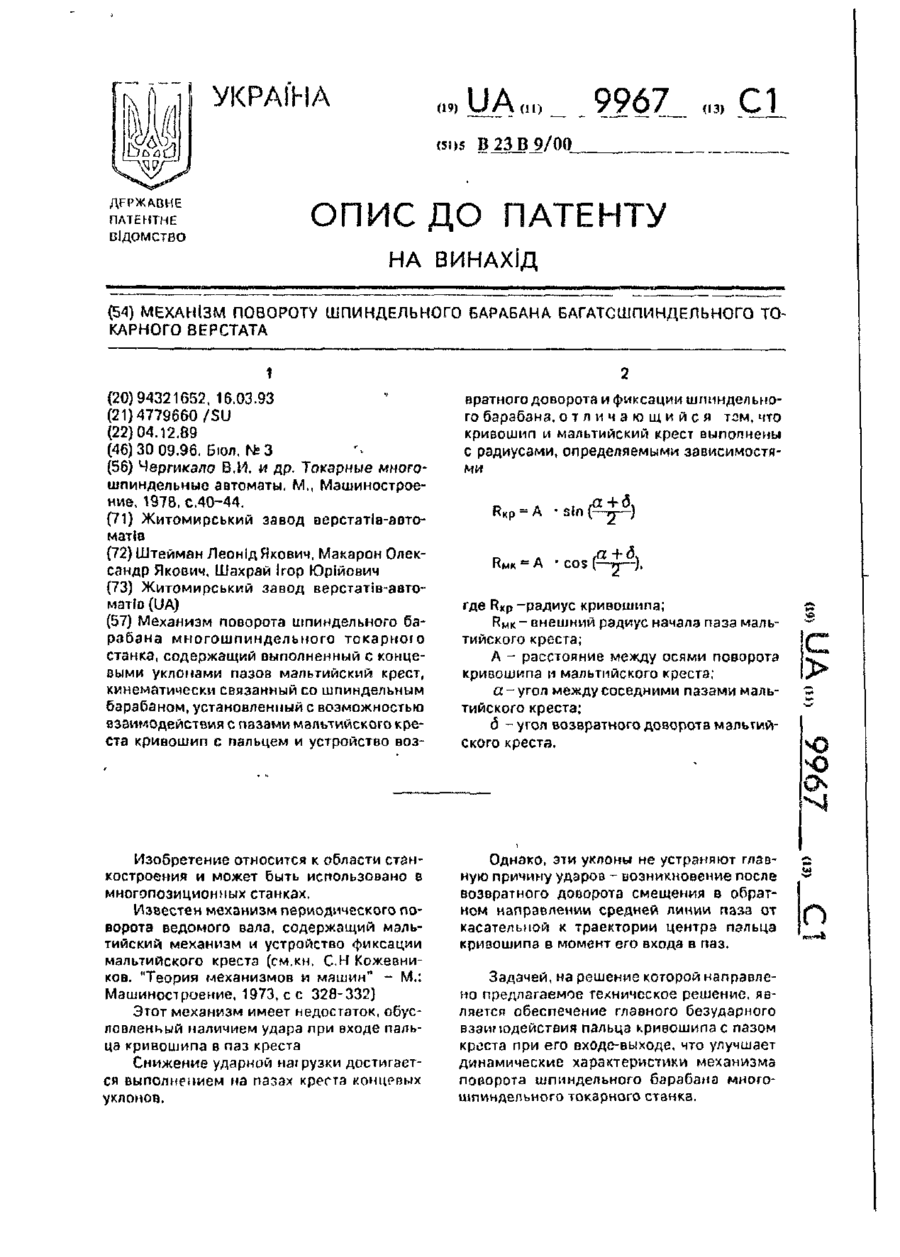
Механізм повороту шпиндельного барабана багатошпиндельного токарного верстата
Номер патенту: 9967
Опубліковано: 30.09.1996
Автори: Штейман Леонід Якович, Шахрай Ігор Юрійович, Макарон Олександр Якович
МПК: B23B 9/00
Мітки: верстата, механізм, барабана, шпиндельного, повороту, багатошпиндельного, токарного
Текст:
...техническое решение, является обеспечение глзвного безударного взаимодействия пальца кривошипа с пазом кроста при его входе-выходе, что улучшает динамические характеристики механизма поворота шпиндельного барабана многошпиндельного токарного станка. з 9967 Предлагаемый механизм содержит веВыполнение указанной задачи достигадущий вал 1, ЗеЖрепленмый на нем кривоется тем, что в механизме поворота шпиншип 2 с пальцем, выполненным...
Безшатунний механізм

Номер патенту: 157
Опубліковано: 30.04.1993
Автор: Балбишев Василь Микитович
МПК: F01B 9/02
Мітки: безшатунний, механізм
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и я Бесшатунный механизм, содержащий два кривошипа, на которых жестко насажены вращающиеся шестерни с радиусом начальной окружности, равным одной четверти хода поршней, а также пара неподвижных шестерен внутреннею зацепления с радиусом начальной окружности, равным половине хода поршней, при этом вращающиеся шестерни установлены с возможностью взаимодействия с неподвижными шестернями, о т л и ч а ю щ и й...
Привод транспортного засобу

Номер патенту: 3356
Опубліковано: 27.12.1994
Автор: Єгоров Володимир Олексійович
МПК: B62M 1/00
Мітки: привод, транспортного, засобу
Формула / Реферат:
Привод транспортного средства, содержащий шарнирный четырехзвенник, в котором коромысло соединено с рамой через кривошип и рычаг, установленный на опоре, причем кривошип имеет ведущую звездочку на ведущем валу, педаль установлена на коромысле, а длина коромысла равна 1,1-1,3 длины кривошипа, отличающийся тем, что четырехзвенник выполнен в виде шарнирного параллелограмма, в котором неподвижная опора расположена в любой точке окружности,...
Попередній патент: Спосіб розливу легкоокислюваних сплавів
Наступний патент: Стаціонарний перекидач злитків
Випадковий патент: Спосіб "діма см" визначення максимального психомоторного резерву людини в екстремальних умовах дефіциту часу