Пристрій для керування результуючою аеродинамічною силою гвинта
Формула / Реферат
Устройство для управления результирующей аэродинамической силой винта, содержащее винт с одной или более лопастью и механизм изменения угла установки лопасти, выполненный а виде цилиндра, охватывающего вал винта рядом со ступицей, на котором с возможностью осевого перемещения размещены концентричные втулки, взаимодействующие при помощи приводов с цилиндром с одной стороны и посредством ролика и механизма возврата, соединенного с лопастью, с другой стороны, отличающееся тем, что торцы втулок, контактирующие с роликом, имеют ступенчатую форму, а цилиндр выполнен с возможностью вращения вокруг своей оси при помощи индивидуального привода и содержит упоры для предотвращения его осевого перемещения.
Текст
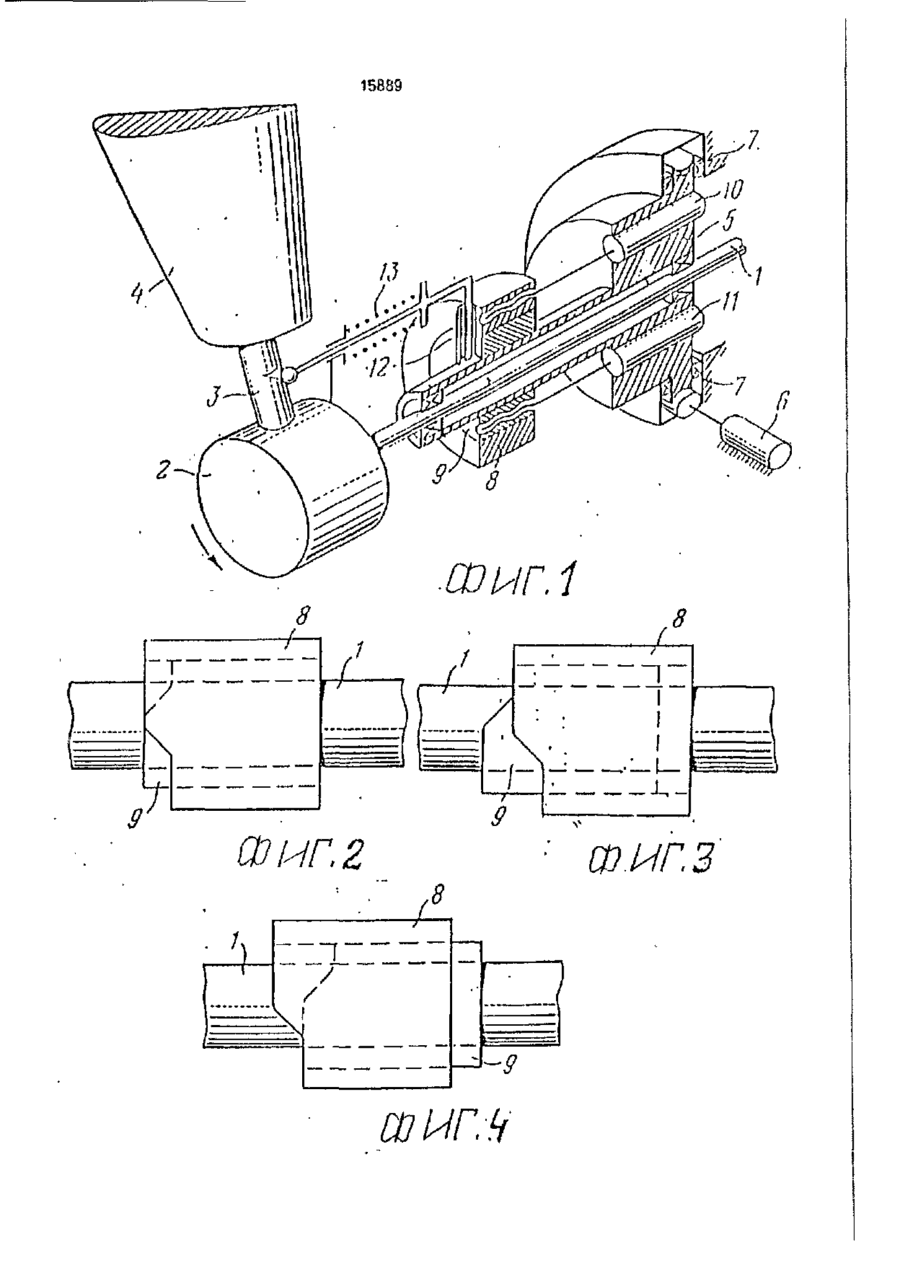
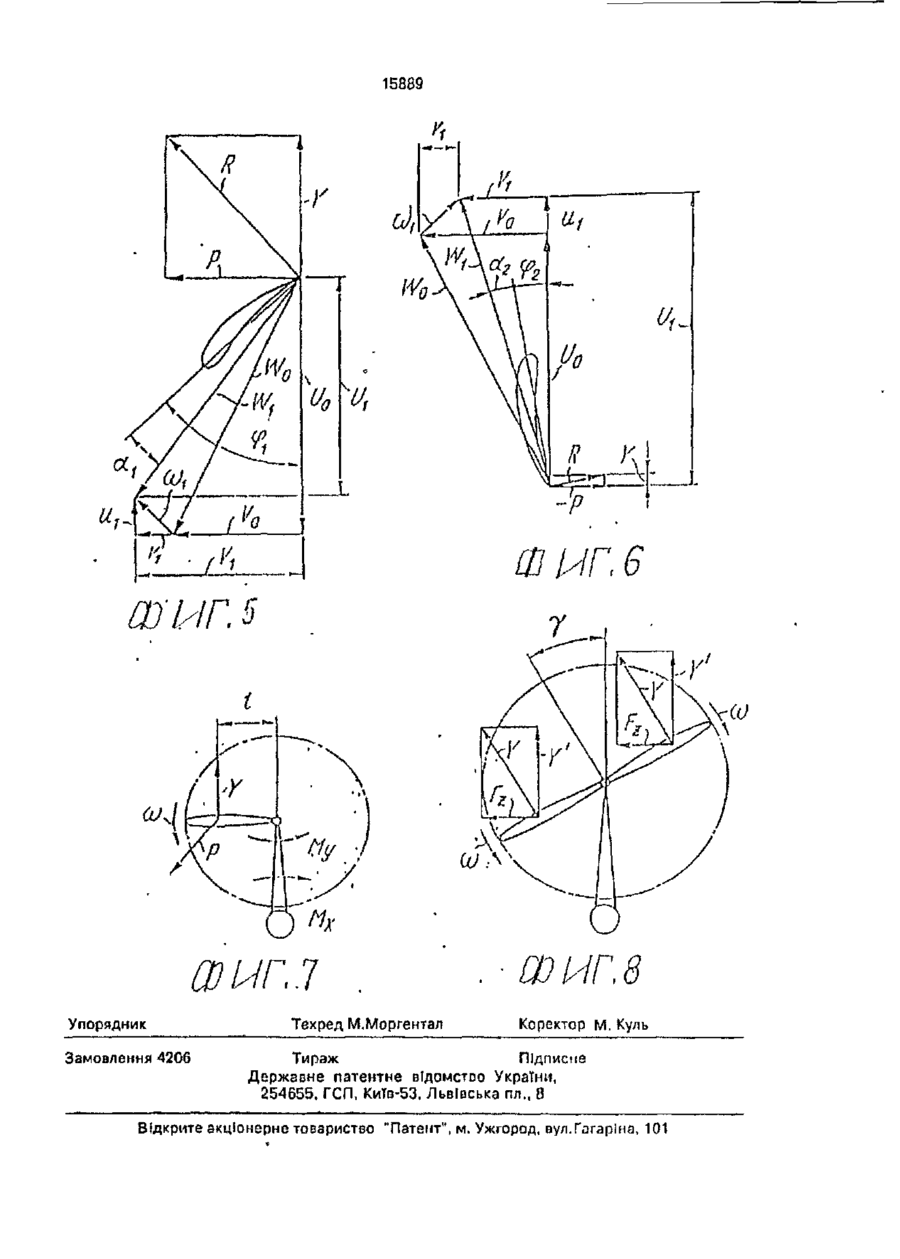
Устройство для управления результирующей аэродинамической силой пинта, содержащее винт с одной или более лопастью и механизм изменения угла установки лопа сти, выполненный о виде цилиндра, охватывающего вал винта рядом со ступицей, па котором с возможностью осопого перемещения размещены концентричные втулки, взаимодействующие при помощи приводов с цилиндром с одной стороны и посредством ролика и механизма возврата, соединенного с лопастью, с другої! стороны, о тл и ч а ю щ е с с я том, что торцы втулок, контактирующие с роликом, имеют ступенчатую форму, а цилиндр выполнен с возможностью вращения вокруг сиоей оси при помощи индивидуального привода \л содержит упоры для предотвращения его осевого перемещения, Изобретение относится к авиастроению, а частности - к устройству для управления результирующей аэродинамической силой винта. Патентуемое устройство для управления результирующей аэродинамической силой винта применимо в авиации в качестве устройства создания тяги и дополнительной подъемной силы, обеспечивающего повышенную маневренность летательных аппаратов. Возможна установка этих устройств в качестве несущих винтов на самолетах, вертолетах ч вертикально взлетающих аппаратах. Возможно применение в спортивной и штурмовой авиации в качестве устройства непосредственно управления боковой силой. Важной проблемой практической аэродинамики летательных аппаратов с винтовыми движителями является повышение их летных и маневренных характеристик. Один из путей решения этой проблемы - усовершенствование непосредственного шштового движителя. Изосстны различные устройство улучшения характеристик винтоо путем управления величиной и направлением результирующей аэродинамической силы винта. Известно например, устройство управления величиной результирующей аэродинамической силы тянущих пли толкающих винтоа. ("Винт изменяемого шага", Рамасепич В.Ф., Самойлов Г.А. Практическая аэродинамика верталетоа. М., Поениздат, 1980, с.77). С увеличением скорости полета летательного аппарата на оинте постоянного шага, то есть угол усі зиовки лопастей ьиша относительно плоскости прощения винта постоянен, угли зтакплолзстей уменьшаются, тем самым снижая тягу. Вкнт изменяв 15889 мого шага по море увеличения скорости полета позооляет увеличивать углы установки лопастей, обеспечивая постоянную оеличику углов атаки, тем самым сохраняя тягу до значительно больших скоростей ЕЮ лето. 5 Кроме того при необходимости винт изменяемого шага обеспечивает реверс тяги, то есть изменение направления силы тяги па противоположное. Таким образом, используя винт изменяемого шага можно управ- 10 лять величиной и направлением силы тяги вдоль оси вращения винта. Однако описанное устройство не позволяет отклонять вектор результирующей аэродинамической силы в сторону от на- 15 правления оси вращения пинта для повышения летных и мэнеиренных характеристик летательных аппаратов. Также известно устройство управления результирующей аэродинамической силой 20 винта при помощи автомата перекоса (Ромасесич В.Оз., Самойлов Г.Л., Практическая аэродинамика вертолетов - М. Воениздат, 1980.С.85). Лопасти винта, закрепленные в сгупице 25 с возможностью вращения оокруг своей оси, посредством рычажной системы взаимодействуют с внутренним кольцом подшипника, схватывающего с зазором вал вичтэ, Внешнее кольцо подшипника связа- 30 но посредством другой рычажной системи с оріачзми управления. Подшипник имеет возможность совершать угловые колебания вокруг двух взаимно перпендикулярных осей в продольном и поперечном направле- 35 ниях. Такое устройство позволяет изменять общий шз*' лопастей, регулируя величину тяги, как и в случае омнта изменяемого шаг?, и кроме того изменять циклический шаг ло- 40 пастей. Фиксируя их под различными углами установки по азимуту описываемой лопастями окружности, темезглым отклонял направление вектора результирующей аэродинамической сили в стороны от на- 45 правления оси вращения винта. Это позволяет повысить маневренность летательного аппарата. Такое устройство широко используется на вертолетах. Однако отклонение вектора результиру- 50 ющей аэродинамической силы в сторону от направления оси вращения пинта возможно только на незначительный угол (до 20 градусое). Это обусловлено плавным изменением угла установки попасти по азимуту и конст- 55 руктианыгли ограничимся ми. Таким образом, существующие ныне устройства управления результирующей аэродинамической силой винта не позволяют отклонять сектор результирующей аэроди намической силы о сторону от направления оси вращения винта на угол более 20 градусов, Задачей настоящего изобретения является создание устройства управления результирующей аэродинамической силой винта, позволяющего отклонять вектор действия этой силы от направления оси вращения оинта на угол 90 градусов, обладающее простым конструктивным исполнением и надежное о эксплуатации, Эта задача решена тем, что о устройстве, содержащем пинт с одной или более лопастями и механизм изменения угла устаиовки лопасти, выполненный в виде цилиндра, охватывающего вал винта рядом со ступицей, ма котором с возможностью осевого перемещения размещены концентричные втулки, взаимодействующие при помощи приводов с цилиндром с одной стороны и посредством ролика и механизма оозпратэ, соединенного с лопастью, с другой стороны, согласно изобретению, торцы концентричных втулок, контактирующие с роликом, имеют ступенчатую форму и обеспечивают установку лопасти в заданные выше режимы, а цилиндр выполнен с возможностью вращения вокруг своей оси для управления нулевым азимутальным положенисм при помощи индивидуального привода и содержит упоры для предотвращения его осевого перемещения и сохранения заданных втулками режимов. Такое устройство для управления реэультирующей аэродинамической силой позволяет наилучшим образом обеспечить аэродинамические режимы работы лопастей винта, повысить коэффициент полезного действия винта, а также повысить маневренность летательного аппарата в целом. Сущность настоящего изобретения заключается в следующем. Лопасть винта при движении по азимуту на участке от 0 до л рлд. устанавливается таким образом, чтобы угол атаки соответствовал максимальным или наивыгоднейшим режимам работы профиля лопасти, то есть коэффициент подъемной силы профиля Су^ max или качество К" max. При движении на участке от л: до 2тг радиан лопасть устанавливается таким образом, чтобы угол атаки лопасти соответствовал режиму минимальной подъемной силы и сопротивления профиля лопасти, то есть Су - 0 и коэффициент сопротивления профиля Сх - min. При этом возникают несбалансированные моменты, действующие о двух плоскостях {М х и Му). Один момент будет направлен в сторону противополож 1Б8С9 ную вращению винта и действовать в его плоскости прощения, другой будет дейстиопать в плоскости, перпендикулярной плоскости, вращения винта и разворачивать летательный аппарат в сторону участка опи- 5 сывземой окружности от л: до 2 зі радиан. Если компенсировать эти моменты еще одним винтом с синхронным вращением D противоположную сторону, расположив его ось вращения параллельно либо соосно, или 10 •елким-либо другим устройством, например, органами упраиления летательного аппарата, то на летательный аппарат будет действовать суммарная сила, направление которой будет не соппадать с направлением 15 оси вращения винта. Управление направлением отой силы осуществляется изменением углов установки лопастей и положением нуля азимуіа лопасти. В результате реализации конструкции, 20 заложенной в изобретении, летательный зппзрат приобретает громе тяги еще и дополнительную подъемную пли боковую силу, улучшается его маневренность за счэт получения возможности непосредствен ного у п- 25 равленпч бокопой силой. Исследованиями установлено, что коэффициент полезного действия винта увеличивается приблизительно на 10~1!3%. Из фиг.1 показано устройство, выпол- 30 пенное согласно изобретению, изображенное в иэомстрии; фи г.2 упр о именно изображает ЕИЦ cnepxy на концентричные птулки, югда их взаимное расположение абеспечииэет усчапокку углоа лопастей, 35 іди на ко о их для обоих участков от 0 до к рад. и от п до 2 тс радиан; фиг.З - вил сверку на концентричные в гулки, когда их взаимное расположение обеспачи-зает установку углов лопастей, больших для участка 40 от 0 до 1 п радиан; фиг.4 - пид соерху на 2 концентричные птулки, когда их оззиммио расположение обеспечивает установку угJ.OB лопастей, больших для участка от л: до 2 ггрздиэн; фиг.5 содержит пекторные ди- 4!5 зграммы скоростей и сил, действующих на отдельный элемеиглопасти, движущейся по азимуту на участке от 0 до л: радиан; фиг,б - векторные диаграммы скоростей и сил, действующих па отдельный элемент лопа- 50 сти, движущейся по азимуту на участке от ж j\o2or. радиан; фиг,7 упрощенно изображает возникновение моментов при движении лопасти на участке от 0 до я радиан; фиг.П - возникновение бокопой силы. S5 Усіройстно для управления результирующей аэродинамической силой винта, выполненное согласно изобретению (фигЛ) содержит вал 1, жест ко связанный со сгупм цей 2, и посредством стакана 3 с лопастью А. Количество лопастей 4 обуславливается принятой конструкцией летательного аппарата. Лопасти имеют возможность варьирования угла установки. Вблизи ступицы 2 на апп 1 посажен цилиндр 5, с возможностью вращения вокруг своей оси с помощью индивидуального привода 6. Цилиндр 5 содержит упоры 7 для предотвращения его осевого перемещения. J !а цилиндре 5 с возможностью осепого перемещения размещены концентричные итулки 8 и 9(фиг,1,2, 3,4) которые с одной стороны взаимодействуют с цилиндром 5 (фиг.1) посредством приводоо 10 и 1Ї, а с другой стороны взаиподействуют посредствен ролика 12 и мехаипзпл 13 позврата с лопастью 4, Втулки 8 и 9 со сторони контактирующей с роликом 12 имеют сіупа
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B64C 11/00
Мітки: аеродинамічною, керування, силою, гвинта, результуючою, пристрій
Код посилання
<a href="https://ua.patents.su/6-15889-pristrijj-dlya-keruvannya-rezultuyuchoyu-aerodinamichnoyu-siloyu-gvinta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування результуючою аеродинамічною силою гвинта</a>
Викопуючий пристрій для коренеплодів
Номер патенту: 1437
Опубліковано: 25.03.1994
Автори: Шифердеккер Клаус, Гевко Роман Богданович, Мартиненко Володимир Якимович, Данильченко Михайло Григорович, Кондрачук Петро Іванович, Бессонов Олег Геннадійович
МПК: A01D 25/04
Мітки: коренеплодів, викопуючий, пристрій
Формула / Реферат:
Выкапывающее устройство для корнеплодов, содержащее корнеизвлекающий рабочий орган и расположенный над ним битер с лопастями, охваченными эластичными накладками, имеющими избыточную длину между точками крепления к лопасти, отличающееся тем, что, с целью улучшения качества транспортировки и очистки, эластичная накладка выполнена в виде наклонной поверхности, при этом наклоны эластичных накладок соседних лопастей выполнены в...
Пристрій для транспортування та очищення коренеплодів
Номер патенту: 7742
Опубліковано: 26.12.1995
Автори: Кузьмінов Вадим Георгійович, Покуса Олексій Олександрович, Русанов Іван Іванович, Іванина Анатолій Вікторович, Сенченко Микола Михайлович, Ривлін Валерій Олександрович, Юрченко Олександр Володимирович, Кожушко Дмитро Ігнатович
МПК: A01D 33/08
Мітки: пристрій, коренеплодів, транспортування, очищення
Формула / Реферат:
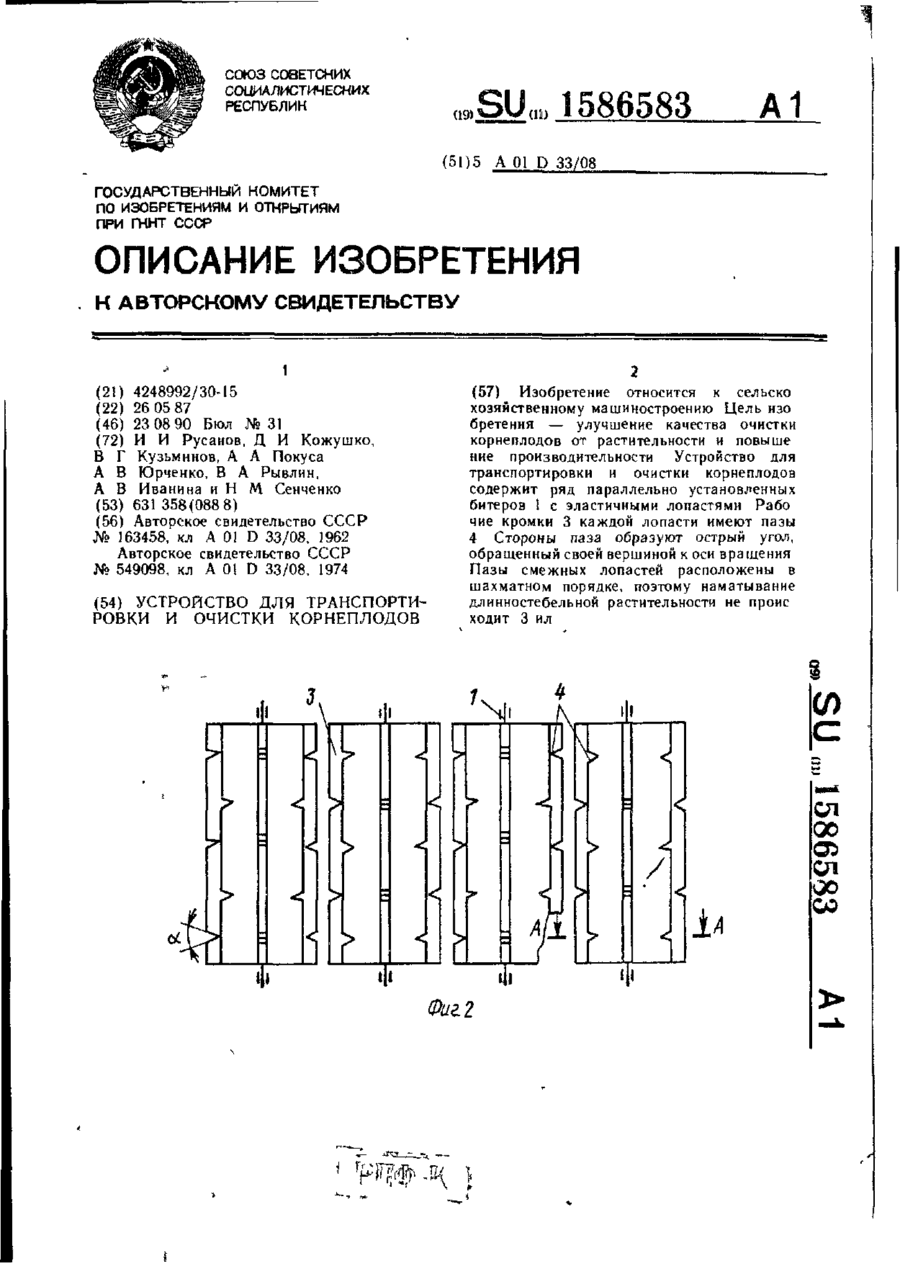
Устройство для транспортировки и очистки корнеплодов, содержащее ряд параллельно установленных битеров с гибкими лопастями, отличающееся тем, что, с целью улучшения качества очистки корнеплодов от растительных примесей и повышения производительности, рабочие кромки гибких лопастей выполнены с пазами V-образной формы, имеющими острый угол между сторонами, обращенный своей вершиной, к оси вращения битера и меньший по величине угла трения...
Пристрій для ручного керування педаллю гальма автомобіля
Номер патенту: 6612
Опубліковано: 29.12.1994
Автор: Яланжи Микола Іванович
МПК: B60K 26/00
Мітки: педаллю, керування, ручного, гальма, автомобіля, пристрій
Формула / Реферат:
1. Устройство для ручного управления педалью тормоза автомобиля, содержащее педаль, шарнирно соединенную посредством неподвижной оси с кронштейном передней стенки кузова, управляющий шток и промежуточный рычаг, кинематически связанный с педалью и шарнирно соединенный одним концом с управляющим штоком, а другим - с кузовом, отличающееся тем, что оно снабжено самоустанавливающейся опорой, закрепленной на кузове, а управляющий шток пропущен...
Транспортний засіб, що приводиться в дію мускульною силою людини
Номер патенту: 9859
Опубліковано: 30.09.1996
Автори: Мосевич Едуард Владиславович, Хоптинець Борис Миколайович, Навроцька Нінель Валентинівна, Ільчишина Світлана Валентинівна, Зорін Олєг Даніловіч
МПК: B62M 1/00
Мітки: засіб, мускульною, людини, приводиться, транспортний, дію, силою
Формула / Реферат:
(57) Транспортное средство, приводимое в действие мускульной силой человека, содержащее переднее ведомое колесо, руль для его управления, раму с задним ведущим колесом, седло, правый и левый приводные рычаги с педалями и устройство приведение в действие, и механизм переключения скорости, отличающееся тем, что устройство приведения в действие выполнено в виде двух симметрично расположенных относительно продольной оси транспортного средства...
Пристрій керування для системи опалення та вентиляції транспортного засобу
Номер патенту: 5052
Опубліковано: 28.12.1994
Автори: Гурлянд Арій Давидович, Лимар Віктор Іванович
МПК: B60H 1/00
Мітки: засобу, керування, системі, транспортного, пристрій, опалення, вентиляції
Формула / Реферат:
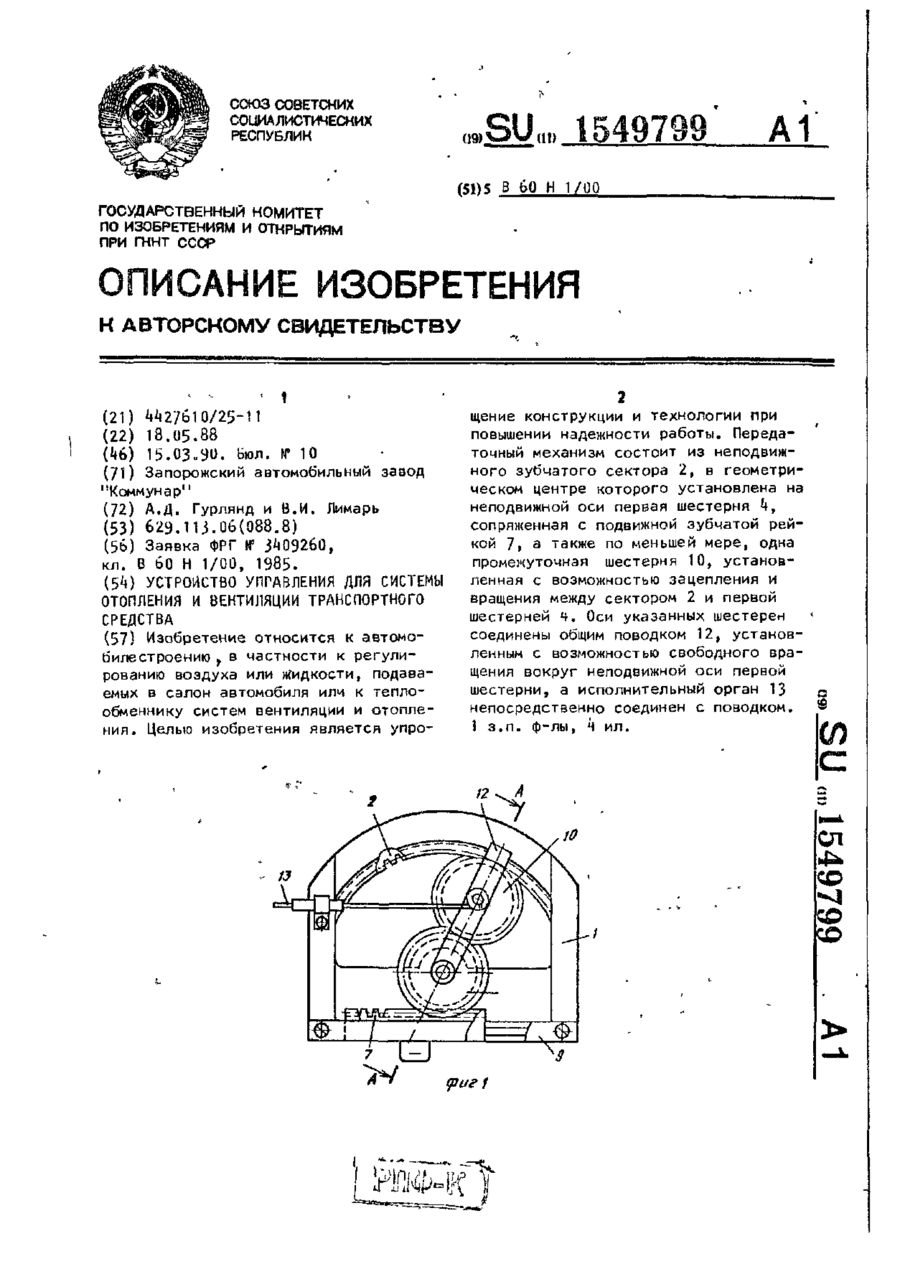
1. Устройство управления для системы отопления и вентиляции транспортного средства, содержащее подвижно установленный управляющий элемент в виде зубчатой рейки, кинематически связанный посредством понижающего передаточного механизма с исполнительным органом в виде крана или заслонки системы отопления и вентиляции транспортного средства, при этом понижающий передаточный механизм включает в себя неподвижно установленный зубчатый...
Попередній патент: Тепловентилятор
Наступний патент: Спосіб вентиляції будинку та устрій для його здійснення
Випадковий патент: Композиція інгредієнтів для приготування цукрового печива