Радіолокаційний вимірювач кутової координати цілі
Номер патенту: 17455
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
Формула / Реферат
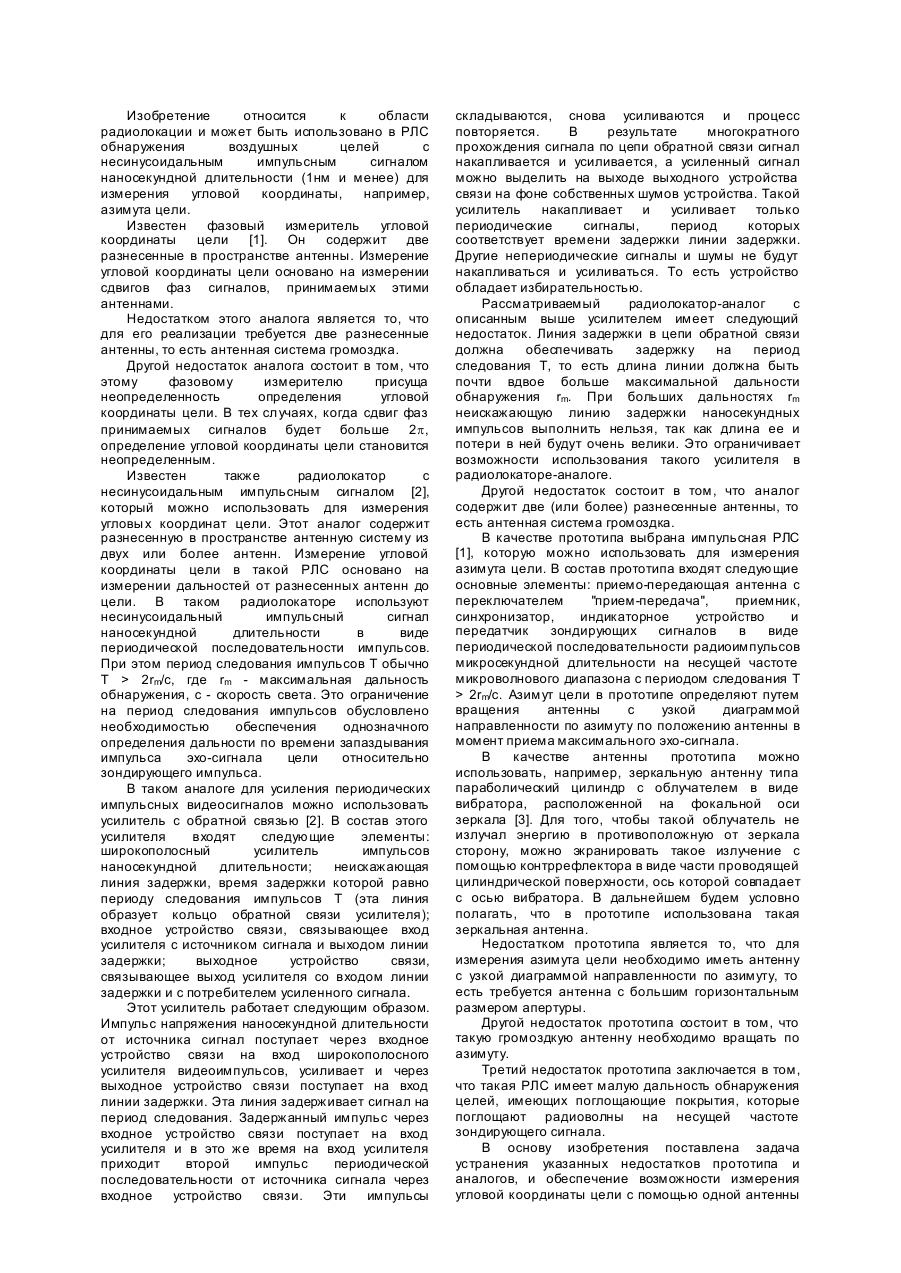
Радиолокационный измеритель угловой координаты цели, содержащий зеркальную антенну типа параболический цилиндр с облучателем в виде вибратора с металлическим контррефлектором, связанную через антенный переключатель с передатчиком периодических импульсных сигналов и приемником, связанным последовательно с индикатором, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов чередующейся полярности наносекундной длительности to без несущей частоты с периодом следования T = 2d/c, на выходе приемника установлены две пары широкополосных диодов в противоположной полярности и линия задержки на время T в виде отрезка коаксиального кабеля, первая пара диодов связана со входом этой линии, а вторая пара - с входным устройством связи и наружной оболочкой кабеля на выходе линии задержки, внутренняя жила этого кабеля на выходе линии задержки также связана с входным устройством связи, выход которого связан с широкополосным усилителем видеоимпульсов с обратной связью в виде второй линии задержки на время 2T, выход этого усилителя через выходное устройство связи связан с индикатором, измерителем длительности импульса t и входом второй линии задержки, выход которой через входное устройство связи связан также со входом этого усилителя, на выходе измерителя длительности импульса установлен вычислитель угловой координаты цели из следующего уравнения
где to - длительность зондирующего импульса;
t - длительность импульса эхо-сигналов в приемнике;
T - период следования импульсов;
F = 1/T - частота следования импульсов;
n - номер гармоники спектра сигнала;
b - угловая координата цели;
L - размер апертуры антенны;
lp - размер контррефлектора;
d - расстояние от вибратора облучателя до контррефлектора;
c - скорость света.
Текст
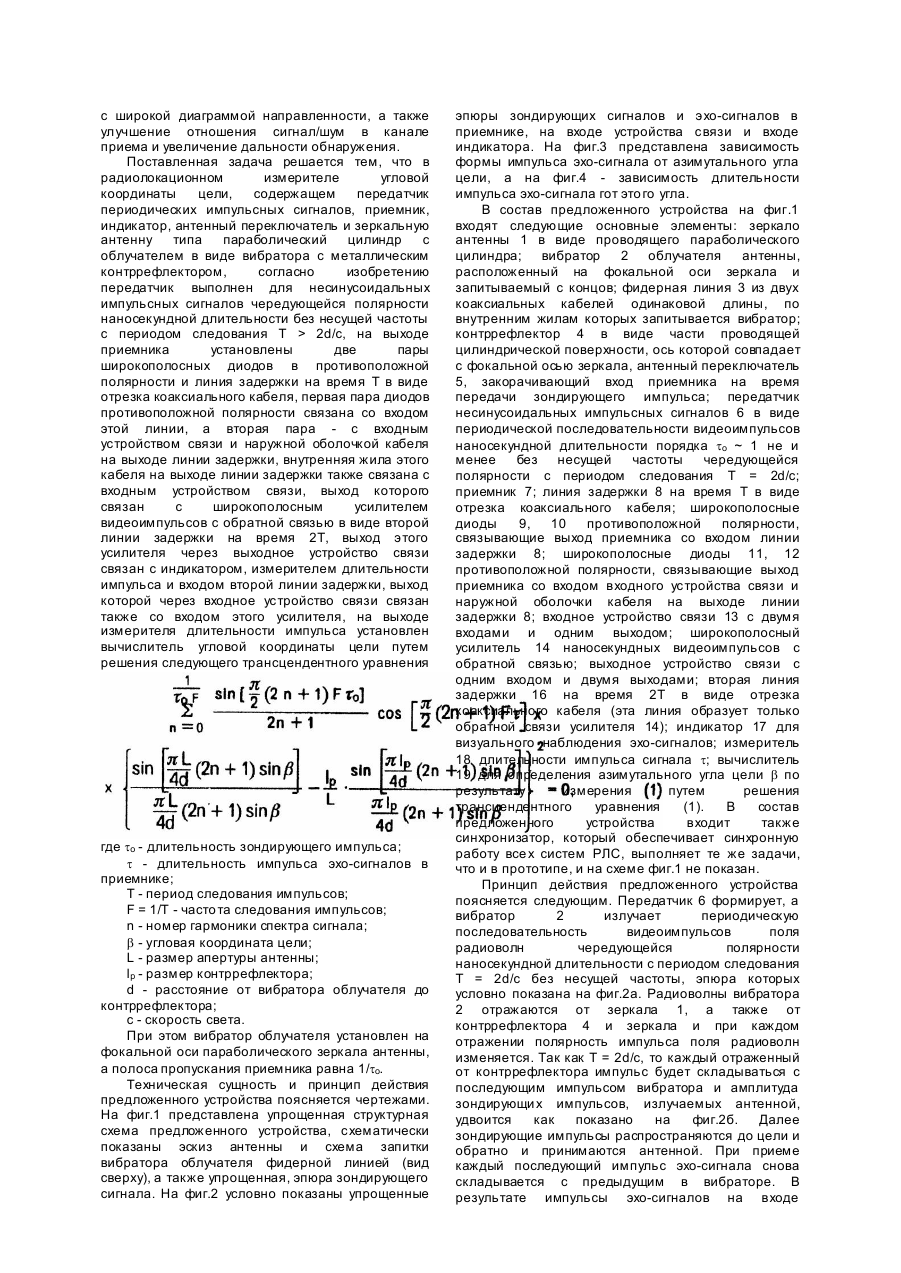
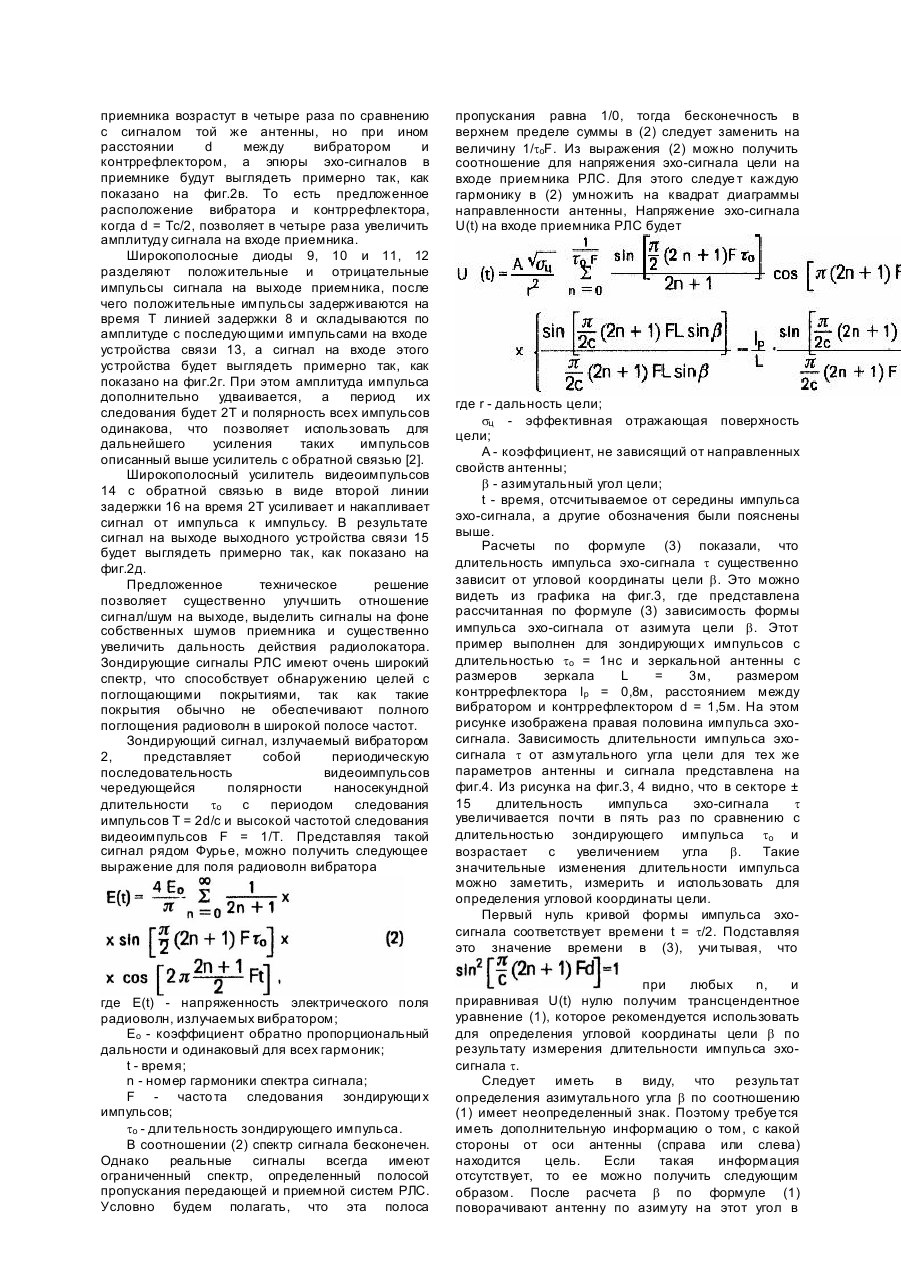
Изобретение относится к области радиолокации и может быть использовано в РЛС обнаружения воздушных целей с несинусоидальным импульсным сигналом наносекундной длительности (1нм и менее) для измерения угловой координаты, например, азимута цели. Известен фазовый измеритель угловой координаты цели [1]. Он содержит две разнесенные в пространстве антенны. Измерение угловой координаты цели основано на измерении сдвигов фаз сигналов, принимаемых этими антеннами. Недостатком этого аналога является то, что для его реализации требуется две разнесенные антенны, то есть антенная система громоздка. Другой недостаток аналога состоит в том, что этому фазовому измерителю присуща неопределенность определения угловой координаты цели. В тех случаях, когда сдвиг фаз принимаемых сигналов будет больше 2p, определение угловой координаты цели становится неопределенным. Известен также радиолокатор с несинусоидальным импульсным сигналом [2], который можно использовать для измерения угловы х координат цели. Этот аналог содержит разнесенную в пространстве антенную систему из двух или более антенн. Измерение угловой координаты цели в такой РЛС основано на измерении дальностей от разнесенных антенн до цели. В таком радиолокаторе используют несинусоидальный импульсный сигнал наносекундной длительности в виде периодической последовательности импульсов. При этом период следования импульсов T обычно Т > 2rm/c, где rm - максимальная дальность обнаружения, c - скорость света. Это ограничение на период следования импульсов обусловлено необходимостью обеспечения однозначного определения дальности по времени запаздывания импульса эхо-сигнала цели относительно зондирующего импульса. В таком аналоге для усиления периодических импульсных видеосигналов можно использовать усилитель с обратной связью [2]. В состав этого усилителя входят следующие элементы: широкополосный усилитель импульсов наносекундной длительности; неискажающая линия задержки, время задержки которой равно периоду следования импульсов T (эта линия образует кольцо обратной связи усилителя); входное устройство связи, связывающее вход усилителя с источником сигнала и выходом линии задержки; выходное устройство связи, связывающее выход усилителя со входом линии задержки и с потребителем усиленного сигнала. Этот усилитель работает следующим образом. Импульс напряжения наносекундной длительности от источника сигнал поступает через входное устройство связи на вход широкополосного усилителя видеоимпульсов, усиливает и через выходное устройство связи поступает на вход линии задержки. Эта линия задерживает сигнал на период следования. Задержанный импульс через входное устройство связи поступает на вход усилителя и в это же время на вход усилителя приходит второй импульс периодической последовательности от источника сигнала через входное устройство связи. Эти импульсы складываются, снова усиливаются и процесс повторяется. В результате многократного прохождения сигнала по цепи обратной связи сигнал накапливается и усиливается, а усиленный сигнал можно выделить на выходе выходного устройства связи на фоне собственных шумов устройства. Такой усилитель накапливает и усиливает только периодические сигналы, период которых соответствует времени задержки линии задержки. Другие непериодические сигналы и шумы не будут накапливаться и усиливаться. То есть устройство обладает избирательностью. Рассматриваемый радиолокатор-аналог с описанным выше усилителем имеет следующий недостаток. Линия задержки в цепи обратной связи должна обеспечивать задержку на период следования T, то есть длина линии должна быть почти вдвое больше максимальной дальности обнаружения rm. При больших дальностях rm неискажающую линию задержки наносекундных импульсов выполнить нельзя, так как длина ее и потери в ней будут очень велики. Это ограничивает возможности использования такого усилителя в радиолокаторе-аналоге. Другой недостаток состоит в том, что аналог содержит две (или более) разнесенные антенны, то есть антенная система громоздка. В качестве прототипа выбрана импульсная РЛС [1], которую можно использовать для измерения азимута цели. В состав прототипа входят следующие основные элементы: приемо-передающая антенна с переключателем "прием-передача", приемник, синхронизатор, индикаторное устройство и передатчик зондирующих сигналов в виде периодической последовательности радиоимпульсов микросекундной длительности на несущей частоте микроволнового диапазона с периодом следования T > 2rm/c. Азимут цели в прототипе определяют путем вращения антенны с узкой диаграммой направленности по азимуту по положению антенны в момент приема максимального эхо-сигнала. В качестве антенны прототипа можно использовать, например, зеркальную антенну типа параболический цилиндр с облучателем в виде вибратора, расположенной на фокальной оси зеркала [3]. Для того, чтобы такой облучатель не излучал энергию в противоположную от зеркала сторону, можно экранировать такое излучение с помощью контррефлектора в виде части проводящей цилиндрической поверхности, ось которой совпадает с осью вибратора. В дальнейшем будем условно полагать, что в прототипе использована такая зеркальная антенна. Недостатком прототипа является то, что для измерения азимута цели необходимо иметь антенну с узкой диаграммой направленности по азимуту, то есть требуется антенна с большим горизонтальным размером апертуры. Другой недостаток прототипа состоит в том, что такую громоздкую антенну необходимо вращать по азимуту. Третий недостаток прототипа заключается в том, что такая РЛС имеет малую дальность обнаружения целей, имеющих поглощающие покрытия, которые поглощают радиоволны на несущей частоте зондирующего сигнала. В основу изобретения поставлена задача устранения указанных недостатков прототипа и аналогов, и обеспечение возможности измерения угловой координаты цели с помощью одной антенны с широкой диаграммой направленности, а также улучшение отношения сигнал/шум в канале приема и увеличение дальности обнаружения. Поставленная задача решается тем, что в радиолокационном измерителе угловой координаты цели, содержащем передатчик периодических импульсных сигналов, приемник, индикатор, антенный переключатель и зеркальную антенну типа параболический цилиндр с облучателем в виде вибратора с металлическим контррефлектором, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов чередующейся полярности наносекундной длительности без несущей частоты с периодом следования T > 2d/c, на выходе приемника установлены две пары широкополосных диодов в противоположной полярности и линия задержки на время T в виде отрезка коаксиального кабеля, первая пара диодов противоположной полярности связана со входом этой линии, а вторая пара - с входным устройством связи и наружной оболочкой кабеля на выходе линии задержки, внутренняя жила этого кабеля на выходе линии задержки также связана с входным устройством связи, выход которого связан с широкополосным усилителем видеоимпульсов с обратной связью в виде второй линии задержки на время 2T, выход этого усилителя через выходное устройство связи связан с индикатором, измерителем длительности импульса и входом второй линии задержки, выход которой через входное устройство связи связан также со входом этого усилителя, на выходе измерителя длительности импульса установлен вычислитель угловой координаты цели путем решения следующего трансцендентного уравнения где to - длительность зондирующего импульса; t - длительность импульса эхо-сигналов в приемнике; T - период следования импульсов; F = 1/T - часто та следования импульсов; n - номер гармоники спектра сигнала; b - угловая координата цели; L - размер апертуры антенны; lp - размер контррефлектора; d - расстояние от вибратора облучателя до контррефлектора; c - скорость света. При этом вибратор облучателя установлен на фокальной оси параболического зеркала антенны, а полоса пропускания приемника равна 1/to. Техническая сущность и принцип действия предложенного устройства поясняется чертежами. На фиг.1 представлена упрощенная структурная схема предложенного устройства, схематически показаны эскиз антенны и схема запитки вибратора облучателя фидерной линией (вид сверху), а также упрощенная, эпюра зондирующего сигнала. На фиг.2 условно показаны упрощенные эпюры зондирующих сигналов и эхо-сигналов в приемнике, на входе устройства связи и входе индикатора. На фиг.3 представлена зависимость формы импульса эхо-сигнала от азимутального угла цели, а на фиг.4 - зависимость длительности импульса эхо-сигнала гот это го угла. В состав предложенного устройства на фиг.1 входят следующие основные элементы: зеркало антенны 1 в виде проводящего параболического цилиндра; вибратор 2 облучателя антенны, расположенный на фокальной оси зеркала и запитываемый с концов; фидерная линия 3 из двух коаксиальных кабелей одинаковой длины, по внутренним жилам которых запитывается вибратор; контррефлектор 4в виде части проводящей цилиндрической поверхности, ось которой совпадает с фокальной осью зеркала, антенный переключатель 5, закорачивающий вход приемника на время передачи зондирующего импульса; передатчик несинусоидальных импульсных сигналов 6 в виде периодической последовательности видеоимпульсов наносекундной длительности порядка to ~ 1 не и менее без несущей частоты чередующейся полярности с периодом следования T = 2d/c; приемник 7; линия задержки 8 на время T в виде отрезка коаксиального кабеля; широкополосные диоды 9, 10 противоположной полярности, связывающие выход приемника со входом линии задержки 8; широкополосные диоды 11, 12 противоположной полярности, связывающие выход приемника со входом входного устройства связи и наружной оболочки кабеля на выходе линии задержки 8; входное устройство связи 13 с двумя входами и одним выходом; широкополосный усилитель 14 наносекундных видеоимпульсов с обратной связью; выходное устройство связи с одним входом и двумя выходами; вторая линия задержки 16 на время 2T в виде отрезка коаксиального кабеля (эта линия образует только обратной связи усилителя 14); индикатор 17 для визуального наблюдения эхо-сигналов; измеритель 18 длительности импульса сигнала t; вычислитель 19 для определения азимутального угла цели b по результату измерения путем решения трансцендентного уравнения (1). В состав предложенного устройства входит также синхронизатор, который обеспечивает синхронную работу все х систем РЛС, выполняет те же задачи, что и в прототипе, и на схеме фиг.1 не показан. Принцип действия предложенного устройства поясняется следующим. Передатчик 6 формирует, а вибратор 2 излучает периодическую последовательность видеоимпульсов поля радиоволн чередующейся полярности наносекундной длительности с периодом следования T = 2d/c без несущей частоты, эпюра которых условно показана на фиг.2а. Радиоволны вибратора 2 отражаются от зеркала 1, а также от контррефлектора 4 и зеркала и при каждом отражении полярность импульса поля радиоволн изменяется. Так как T = 2d/c, то каждый отраженный от контррефлектора импульс будет складываться с последующим импульсом вибратора и амплитуда зондирующи х импульсов, излучаемых антенной, удвоится как показано на фиг.2б. Далее зондирующие импульсы распространяются до цели и обратно и принимаются антенной. При приеме каждый последующий импульс эхо-сигнала снова складывается с предыдущим в вибраторе. В результате импульсы эхо-сигналов на входе приемника возрастут в четыре раза по сравнению с сигналом той же антенны, но при ином расстоянии d между вибратором и контррефлектором, а эпюры эхо-сигналов в приемнике будут выглядеть примерно так, как показано на фиг.2в. То есть предложенное расположение вибратора и контррефлектора, когда d = Tc/2, позволяет в четыре раза увеличить амплитуду сигнала на входе приемника. Широкополосные диоды 9, 10 и 11, 12 разделяют положительные и отрицательные импульсы сигнала на выходе приемника, после чего положительные импульсы задерживаются на время T линией задержки 8 и складываются по амплитуде с последующими импульсами на входе устройства связи 13, а сигнал на входе этого устройства будет выглядеть примерно так, как показано на фиг.2г. При этом амплитуда импульса дополнительно удваивается, а период их следования будет 2T и полярность всех импульсов одинакова, что позволяет использовать для дальнейшего усиления таких импульсов описанный выше усилитель с обратной связью [2]. Широкополосный усилитель видеоимпульсов 14 с обратной связью в виде второй линии задержки 16 на время 2T усиливает и накапливает сигнал от импульса к импульсу. В результате сигнал на выходе выходного устройства связи 15 будет выглядеть примерно так, как показано на фиг.2д. Предложенное техническое решение позволяет существенно улучшить отношение сигнал/шум на выходе, выделить сигналы на фоне собственных шумов приемника и существенно увеличить дальность действия радиолокатора. Зондирующие сигналы РЛС имеют очень широкий спектр, что способствует обнаружению целей с поглощающими покрытиями, так как такие покрытия обычно не обеспечивают полного поглощения радиоволн в широкой полосе частот. Зондирующий сигнал, излучаемый вибратором 2, представляет собой периодическую последовательность видеоимпульсов чередующейся полярности наносекундной длительности to с периодом следования импульсов T = 2d/с и высокой частотой следования видеоимпульсов F = 1/T. Представляя такой сигнал рядом Фурье, можно получить следующее выражение для поля радиоволн вибратора гдеE(t) - напряженность электрического поля радиоволн, излучаемых вибратором; Eo - коэффициент обратно пропорциональный дальности и одинаковый для всех гармоник; t - время; n - номер гармоники спектра сигнала; F - часто та следования зондирующи х импульсов; to - дли тельность зондирующего импульса. В соотношении (2) спектр сигнала бесконечен. Однако реальные сигналы всегда имеют ограниченный спектр, определенный полосой пропускания передающей и приемной систем РЛС. Условно будем полагать, что эта полоса пропускания равна 1/0, тогда бесконечность в верхнем пределе суммы в (2) следует заменить на величину 1/toF. Из выражения (2) можно получить соотношение для напряжения эхо-сигнала цели на входе приемника РЛС. Для этого следуе т каждую гармонику в (2) умножить на квадрат диаграммы направленности антенны, Напряжение эхо-сигнала U(t) на входе приемника РЛС будет где r - дальность цели; sц - эффективная отражающая поверхность цели; A - коэффициент, не зависящий от направленных свойств антенны; b - азимутальный угол цели; t - время, отсчитываемое от середины импульса эхо-сигнала, а другие обозначения были пояснены выше. Расчеты по формуле (3) показали, что длительность импульса эхо-сигнала t существенно зависит от угловой координаты цели b. Это можно видеть из графика на фиг.3, где представлена рассчитанная по формуле (3) зависимость формы импульса эхо-сигнала от азимута цели b. Этот пример выполнен для зондирующи х импульсов с длительностью to = 1нс и зеркальной антенны с размеров зеркала L = 3м, размером контррефлектора lp = 0,8м, расстоянием между вибратором и контррефлектором d = 1,5м. На этом рисунке изображена правая половина импульса эхосигнала. Зависимость длительности импульса эхосигнала t от азмутального угла цели для тех же параметров антенны и сигнала представлена на фиг.4. Из рисунка на фиг.3, 4 видно, что в секторе ± 15 длительность импульса эхо-сигнала t увеличивается почти в пять раз по сравнению с длительностью зондирующего импульса to и возрастает с увеличением угла b. Такие значительные изменения длительности импульса можно заметить, измерить и использовать для определения угловой координаты цели. Первый нуль кривой формы импульса эхосигнала соответствует времени t = t/2. Подставляя это значение времени в (3), учи тывая, что при любых n, и приравнивая U(t) нулю получим трансцендентное уравнение (1), которое рекомендуется использовать для определения угловой координаты цели b по результату измерения длительности импульса эхосигнала t. Следует иметь в виду, что результат определения азимутального угла b по соотношению (1) имеет неопределенный знак. Поэтому требуе тся иметь дополнительную информацию о том, с какой стороны от оси антенны (справа или слева) находится цель. Если такая информация отсутствует, то ее можно получить следующим образом. После расчета b по формуле (1) поворачивают антенну по азимуту на этот угол в любую сторону. Если после этого дли тельность импульса эхо-сигнала уменьшится, то цель находится в этой стороне, а если возрастет - то в противоположной стороне. В предложенном устройстве принципиально необходимо изучать несинусоидальные импульсные сигналы малой наносекундной длительности to чередующейся полярности с очень высокой частотой следования F = c/2d, так как используемые свойства таких сигналов изменять полярность при отражении и длительность импульса - в зависимости от направления излучения присущи только таким коротким импульсам. Высокая частота следования импульсов F необходима также для того, чтобы линии задержки 8, 16 имели небольшую, приемлемую для реализации длину. При этом прием сигналов производится в интервалах между зондирующими импульсами. Широкополосные диоды 9, 10, 11, 12 необходимы также для того, чтобы преобразовать разнополярные импульсы в последовательность импульсов одинаковой полярности, так как усилитель с обратной связью 14 может накапливать только импульсы одинаковой полярности. Таким образом предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации устройства. Основные элементы предложенного устройства на схеме фиг.1 выполнены следующим образом. Антенна, передатчик 6 и приемник 7 выполнены для излучения и приема сверхширокополосных импульсных сигналов наносекундной длительности без несущей частоты. Такие системы могут быть практически реализованы, так как физические основы и принципы построения таких систем известны и описаны в литературе [2]. Изучить зондирующий сигнал ввиде видеоимпульсов чередующейся полярности можно, например, подводя к вибратору 2 по фидерной линии 3 с концов вибратора от передатчика 6 разнополярные прямоугольные импульсы тока длительностью T = 2d/c с очень коротким фронтом импульсов to ~ нс. Фидерная линия 3 выполнена из двух коаксиальных кабелей одинаковой длины. Сигнал подводится к вибратору с концов по внутренним жилам этих кабелей, а наружные оболочки этих кабелей служат для экранирования излучения фидерной линии, не являются несущими сигнал элементами и могут быть заземлены. Антенный переключатель 5 закорачивает вход приемника на время to при излучении зондирующего импульса. Диоды 9, 10, 11, 12 должны иметь очень широкую полосу пропускания порядка 1/to. Принципы построения усилителя с обратной связью 14, входным 13 и выходным 15 устройствами связи описаны в литературе [2]. Линии задержки 8, 16 могут быть выполнены в виде отрезков коаксиального кабеля сравнительно небольшой, приемлемой для реализации длины. Измеритель длительности наносекундных импульсов 18 известен и освоен промышленностью. Индикатор 17 аналогичен индикаторному устройству прототипа. Вычислитель 19 представляет собой микро-ЭВМ для решения трансцендентного уравнения (1). Динамика работы предложенного устройства осуществляется следующим образом. Передатчик 6 формирует, а вибратор 2 облучателя антенны излучает периодическую последовательность видеоимпульсов поля радиоволн наносекундной длительности to чередующейся полярности с периодом следования T = 2d/c. Радиоволны отражаются от зеркала антенны 1, а также от контррефлектора 4 и зеркала 1 и при каждом отражении полярность импульсов изменяется. В результате отраженный от контррефлектора и зеркала импульс складывается с последующим импульсом, отраженным только от зеркала, и амплитуда импульсов удваивается. Радиоволны распространяются от антенны до цели и обратно и принимаются антенной. При приеме импульс, отраженный от зеркала и контррефлектора, складывается в вибраторе 2 с последующим импульсом, отраженным только от зеркала, и амплитуда импульса еще раз удваивается. Эхо-сигналы из импульсов чередующейся полярности усиливаются приемником 7. Длительность импульса t в канале приема зависит от направления b прихода радиоволн от цели и возрастает с увеличением угла b. Это обусловлено свойствами сигнала и антенны. Положительные и отрицательные импульсы сигнала на выходе приемника 7 разделяются широкополосными диодами 9, 10, 11, 12, так как диоды 9, 10 пропускают только положительные импульсы, а диоды 11, 12 только отрицательные импульсы. После этого положительные импульсы задерживаются на время T линией задержки 8. В результате на входе входного устройства связи 13 импульсы складываются, а амплитуда импульсов и период их следования удваиваются. Усилитель с обратной связью 14 накапливает и усиливает импульсы сигнала так, как описано выше при описании аналога [2]. В результате сигнал может быть обнаружен на фоне собственных шумов приемника, которые усилителем 14 не накапливаются. Индикатор 17 позволяет визуально обнаружить сигналы цели. Измеритель 18 измеряет длительность импульса сигнала t, а вычислитель 19 вычисляет угловую координату цели b п утем решения уравнения (1). Таким образом, предложенное устройство обеспечивает возможность измерения угловой координаты цели с помощью одной антенны с широкой диаграммой направленности, а также значительно улучшает отношение сигнал/шум в канале приема и увеличивает дальность обнаружения целей, в том числе целей с поглощающими покрытиями.
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar angular coordinate of target measuring device
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюРадиолокационный измеритель угловой координаты цели
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: цілі, радіолокаційний, вимірювач, координати, кутової
Код посилання
<a href="https://ua.patents.su/6-17455-radiolokacijjnijj-vimiryuvach-kutovo-koordinati-cili.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційний вимірювач кутової координати цілі</a>
Вимірювач кутової координати цілі для секвентного радіолокатора
Номер патенту: 17470
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: кутової, координати, вимірювач, радіолокатора, цілі, секвентного
Формула / Реферат:
Измеритель угловой координаты цели для секвентного радиолокатора, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных импульсных сигналов в виде периодической последовательности с частотой следования прямоугольных видеоимпульсов наносекундной длительности без несущей частоты, отличающийся тем, что приемопередающая антенна выполнена в виде вибратора, концы которого связаны с антенным...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: цілі, кута, вимірювач, місця, радіолокаційний
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Радіолокаційний імпульсний дальномір

Номер патенту: 17451
Опубліковано: 06.05.1997
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: імпульсний, радіолокаційний, дальномір
Формула / Реферат:
Радиолокационный импульсный дальномер, содержащий передатчик импульсных зондирующих сигналов с периодом следования T1 > 2rm/c, приемо-передающую антенну с антенным переключателем, приемник, синхронизатор и индикатор, отличающийся тем, что антенна, приемник и передатчик выполнены для несинусоидальных импульсных сигналов наносекундной длительности t без несущей частоты в виде периодической пачки n таких импульсов с периодом T1 и периодом...
Вимірювач швидкості цілі для секвентного радіолокатора
Номер патенту: 17465
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: секвентного, цілі, вимірювач, швидкості, радіолокатора
Формула / Реферат:
Измеритель скорости цели для секвентного радиолокатора, содержащий передатчик, антенну с антенным переключателем, приемник и смеситель зондирующих и эхо-сигналов, отличающийся тем, что передатчик, антенна и приемник выполнены для несинусоидальных периодических импульсных сигналов с частотой следования импульсов F больше максимальной допплеровской частоты сигнала на верхней частоте полосы пропускания антенны, смеситель выполнен по мостовой...
Секвентний вимірювач кута місця і швидкості цілі з пристроєм захисту від пасивних перешкод
Номер патенту: 17459
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювач, швидкості, місця, перешкод, пристроєм, пасивних, кута, секвентний, цілі, захисту
Формула / Реферат:
Секвентный измеритель угла места и скорости цели с устройством защиты от пассивных помех, содержащий приемо-передающую антенну с антенным переключателем, передатчик периодических видеоимпульсов наносекундной длительности и приемник, отличающийся тем, что передатчик выполнен с частотой следования F зондирующих импульсов значительно большей максимальной допплеровской частоты на верхней граничной частоте fв полосы пропускания антенны, на выходе...
Попередній патент: Вимірювач кута місця цілі для радіолокатора виявлення
Наступний патент: Секвентний радіолокаційний дальномір
Випадковий патент: Спосіб виробництва морозива з комбінованим складом