Пристрій для моделювання технологічного навантаження при випробуванні машин постійного струму
Номер патенту: 21805
Опубліковано: 10.04.2007
Автори: Коваль Віталій Анатолійович, Сергієнко Сергій Анатолійович, Герда Олександр Анатолійович, Скворцов Ігор Валерійович, Зачепа Юрій Володимирович

Формула / Реферат
Пристрій для формування технологічного навантаження, що містить перетворювач напруги, який з'єднаний через датчик струму з якірним ланцюгом машини, напруга на якому контролюється датчиком, збуджувач, з'єднаний через датчик струму з обмоткою збудження, напруга на якій контролюється датчиком, датчик швидкості обертання двигуна, вентилятор, що під'єднаний до мережі змінної напруги через керований перетворювач, швидкість вентилятора контролюють датчиком продуктивності, датчик температури навколишнього середовища, обчислювальний блок, на який надходять сигнали з відповідних датчиків, який відрізняється тим, що використовують систему регулювання зі змінною структурою, яка доповнена блоком визначення струму холостого ходу, а перемикання між режимами динамічного навантаження на ділянках з незмінною швидкістю та режимами струмообмеження на ділянках розганяння і гальмування виконують за допомогою логічного перемикального пристрою, а необхідна навантажувальна діаграма та тахограма випробувань задається за допомогою електронної обчислювальної машини.
Текст
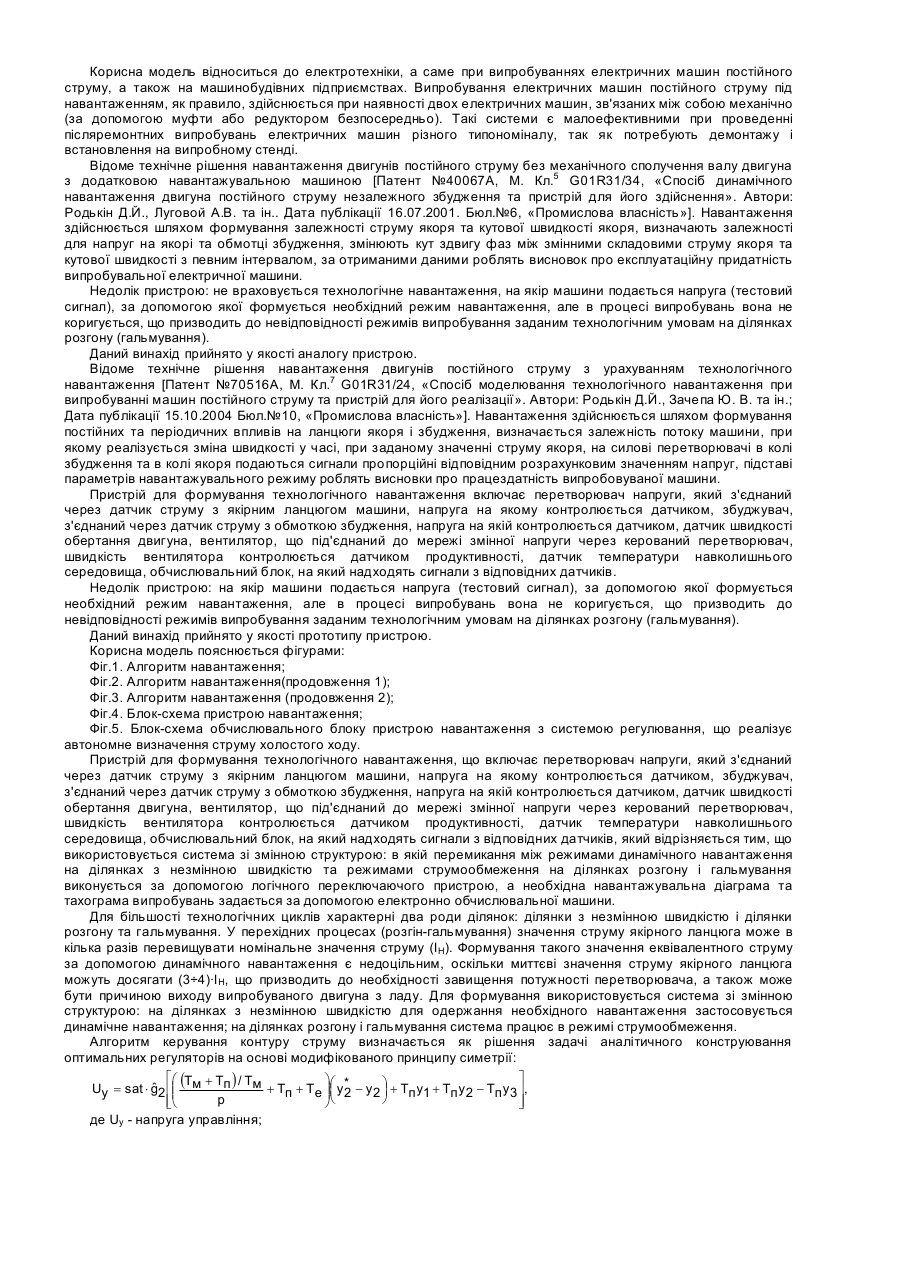
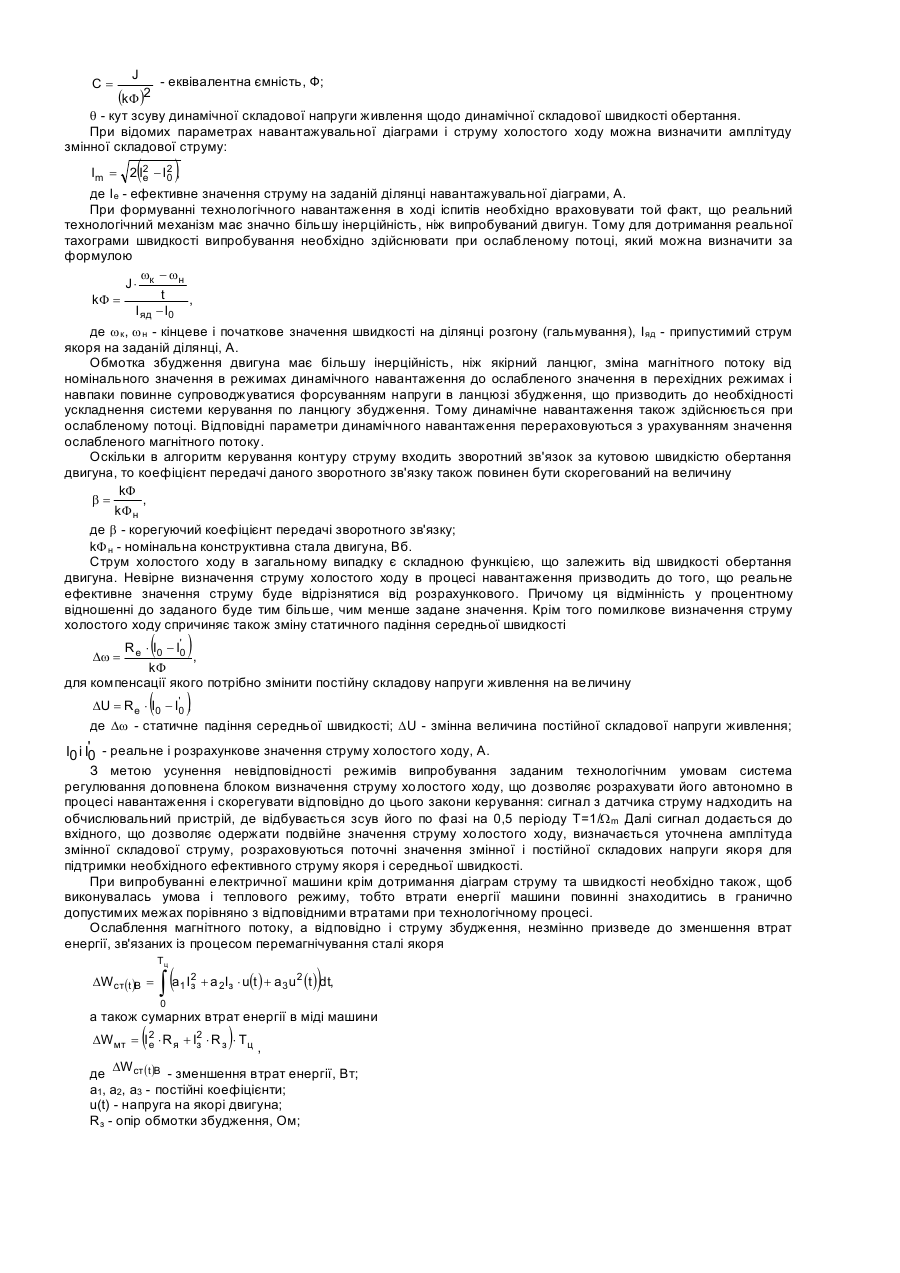
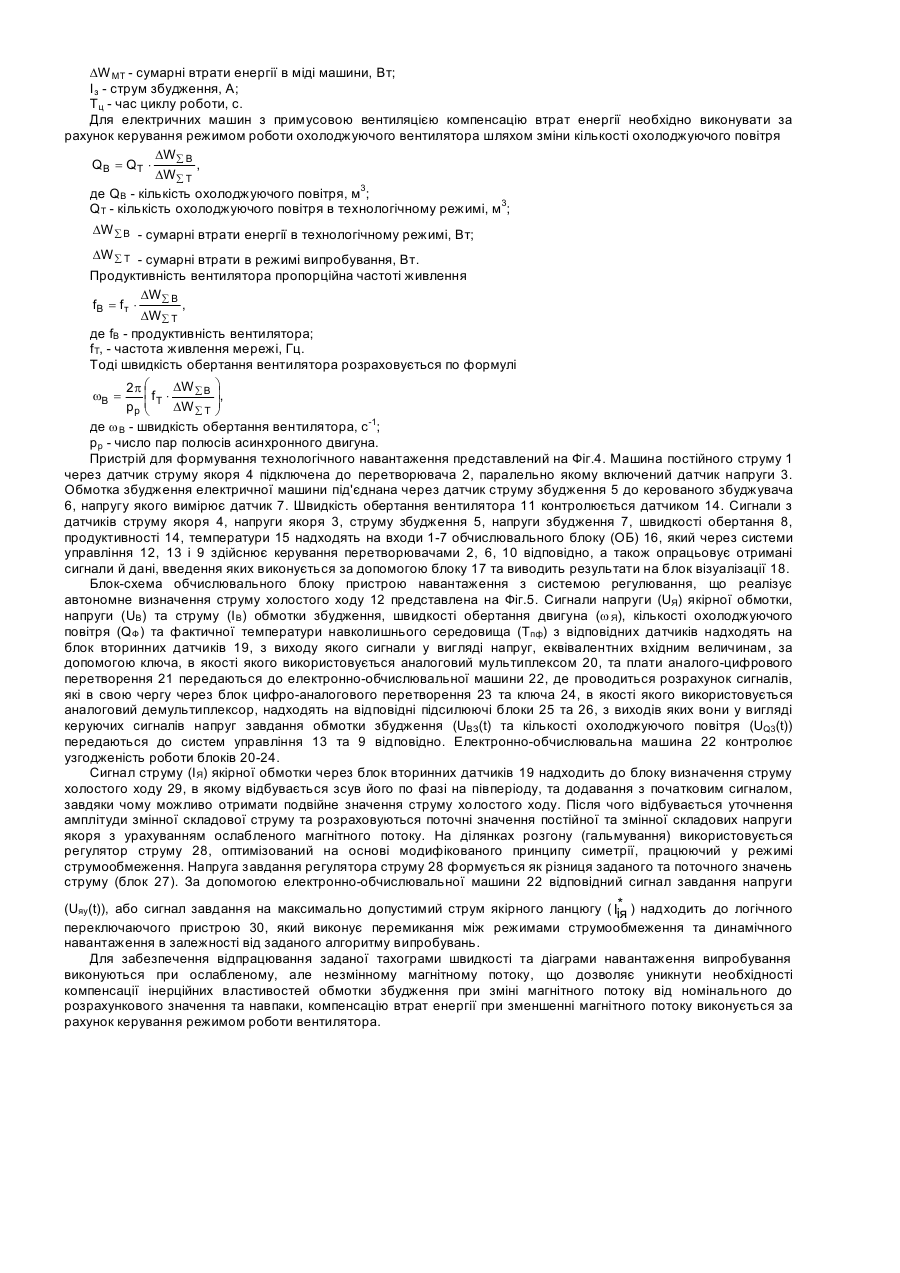
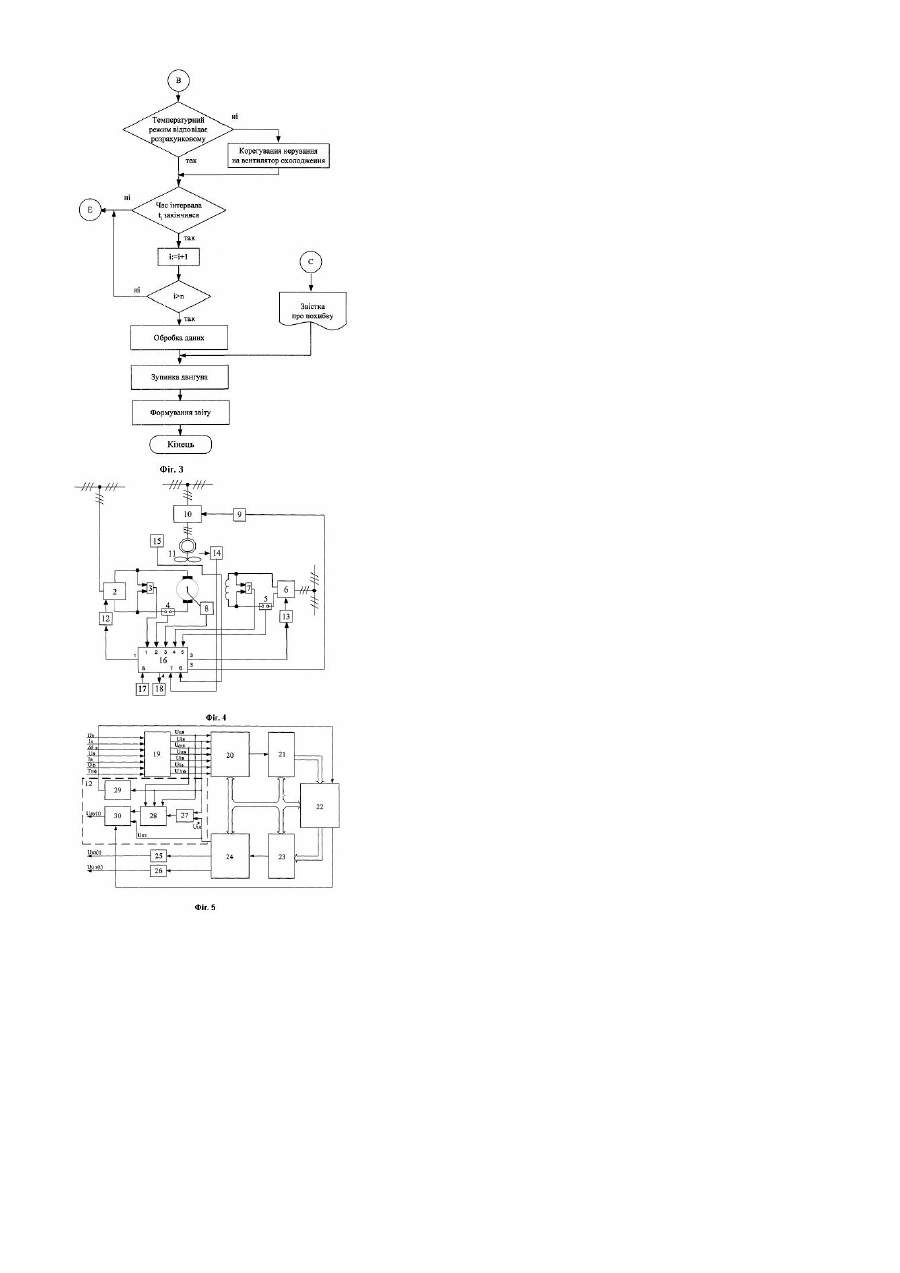
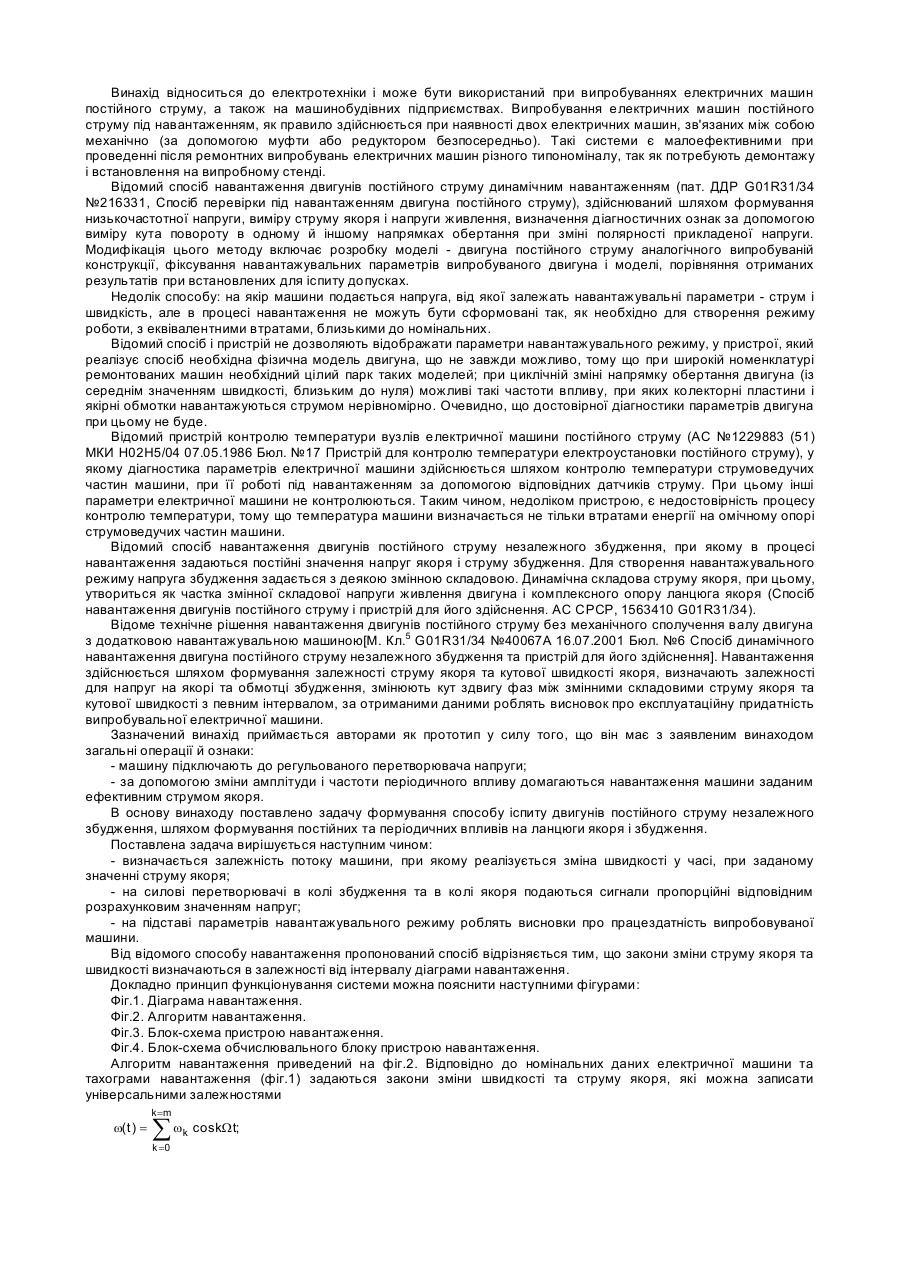
Корисна модель відноситься до електротехніки, а саме при випробуваннях електричних машин постійного струму, а також на машинобудівних підприємствах. Випробування електричних машин постійного струму під навантаженням, як правило, здійснюється при наявності двох електричних машин, зв'язаних між собою механічно (за допомогою муфти або редуктором безпосередньо). Такі системи є малоефективними при проведенні післяремонтних випробувань електричних машин різного типономіналу, так як потребують демонтажу і встановлення на випробному стенді. Відоме технічне рішення навантаження двигунів постійного струму без механічного сполучення валу двигуна з додатковою навантажувальною машиною [Патент №40067А, М. Кл.5 G01R31/34, «Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення». Автори: Родькін Д.Й., Луговой А.В. та ін.. Дата публікації 16.07.2001. Бюл.№6, «Промислова власність»]. Навантаження здійснюється шляхом формування залежності струму якоря та кутової швидкості якоря, визначають залежності для напруг на якорі та обмотці збудження, змінюють кут здвигу фаз між змінними складовими струму якоря та кутової швидкості з певним інтервалом, за отриманими даними роблять висновок про експлуатаційну придатність випробувальної електричної машини. Недолік пристрою: не враховується технологічне навантаження, на якір машини подається напруга (тестовий сигнал), за допомогою якої формується необхідний режим навантаження, але в процесі випробувань вона не коригується, що призводить до невідповідності режимів випробування заданим технологічним умовам на ділянках розгону (гальмування). Даний винахід прийнято у якості аналогу пристрою. Відоме технічне рішення навантаження двигунів постійного струму з урахуванням технологічного навантаження [Патент №70516А, М. Кл.7 G01R31/24, «Спосіб моделювання технологічного навантаження при випробуванні машин постійного струму та пристрій для його реалізації». Автори: Родькін Д.Й., Зачепа Ю. В. та ін.; Дата публікації 15.10.2004 Бюл.№10, «Промислова власність»]. Навантаження здійснюється шляхом формування постійних та періодичних впливів на ланцюги якоря і збудження, визначається залежність потоку машини, при якому реалізується зміна швидкості у часі, при заданому значенні струму якоря, на силові перетворювачі в колі збудження та в колі якоря подаються сигнали пропорційні відповідним розрахунковим значенням напруг, підставі параметрів навантажувального режиму роблять висновки про працездатність випробовуваної машини. Пристрій для формування технологічного навантаження включає перетворювач напруги, який з'єднаний через датчик струму з якірним ланцюгом машини, напруга на якому контролюється датчиком, збуджувач, з'єднаний через датчик струму з обмоткою збудження, напруга на якій контролюється датчиком, датчик швидкості обертання двигуна, вентилятор, що під'єднаний до мережі змінної напруги через керований перетворювач, швидкість вентилятора контролюється датчиком продуктивності, датчик температури навколишнього середовища, обчислювальний блок, на який надходять сигнали з відповідних датчиків. Недолік пристрою: на якір машини подається напруга (тестовий сигнал), за допомогою якої формується необхідний режим навантаження, але в процесі випробувань вона не коригується, що призводить до невідповідності режимів випробування заданим технологічним умовам на ділянках розгону (гальмування). Даний винахід прийнято у якості прототипу пристрою. Корисна модель пояснюється фігурами: Фіг.1. Алгоритм навантаження; Фіг.2. Алгоритм навантаження(продовження 1); Фіг.3. Алгоритм навантаження (продовження 2); Фіг.4. Блок-схема пристрою навантаження; Фіг.5. Блок-схема обчислювального блоку пристрою навантаження з системою регулювання, що реалізує автономне визначення струму холостого ходу. Пристрій для формування технологічного навантаження, що включає перетворювач напруги, який з'єднаний через датчик струму з якірним ланцюгом машини, напруга на якому контролюється датчиком, збуджувач, з'єднаний через датчик струму з обмоткою збудження, напруга на якій контролюється датчиком, датчик швидкості обертання двигуна, вентилятор, що під'єднаний до мережі змінної напруги через керований перетворювач, швидкість вентилятора контролюється датчиком продуктивності, датчик температури навколишнього середовища, обчислювальний блок, на який надходять сигнали з відповідних датчиків, який відрізняється тим, що використовується система зі змінною структурою: в якій перемикання між режимами динамічного навантаження на ділянках з незмінною швидкістю та режимами струмообмеження на ділянках розгону і гальмування виконується за допомогою логічного переключаючого пристрою, а необхідна навантажувальна діаграма та тахограма випробувань задається за допомогою електроннo обчислювальної машини. Для більшості технологічних циклів характерні два роди ділянок: ділянки з незмінною швидкістю і ділянки розгону та гальмування. У перехідних процесах (розгін-гальмування) значення струму якірного ланцюга може в кілька разів перевищувати номінальне значення струму (І Н). Формування такого значення еквівалентного струму за допомогою динамічного навантаження є недоцільним, оскільки миттєві значення струму якірного ланцюга можуть досягати (3÷4)·І Н, що призводить до необхідності завищення потужності перетворювача, а також може бути причиною виходу випробуваного двигуна з ладу. Для формування використовується система зі змінною структурою: на ділянках з незмінною швидкістю для одержання необхідного навантаження застосовується динамічне навантаження; на ділянках розгону і гальмування система працює в режимі струмообмеження. Алгоритм керування контуру струму визначається як рішення задачі аналітичного конструювання оптимальних регуляторів на основі модифікованого принципу симетрії: éæ (Т + Тп ) / Тм ù ö ˆ ç + Тп + Т е ÷æ у * - у 2 ö + Тп у1 + Тп у 2 - Тп у 3 ú, Uу = sat × g2 êç м ÷ ÷ç 2 è ø p êè ú ø ë û де Uy - напруга управління; sat - функція обмеження, що враховує обмеження на максимальне значення керуючого впливу: ì * * ïU , якщо U £ 1; ï Uяз = í ï ± 1, якщо U* > 1. ï î де U* - розрахункове значення алгоритму керування; р - оператор; ˆ g 2 - коефіцієнт підсилення розімкнутого контуру струму; JRe - електромеханічна стала часу якірного ланцюга двигуна, с; Тм = (kФ)2 J - момент інерції привода, приведений до вала двигуна, кгм2; Re - опір якірного ланцюга, Ом; Le - індуктивність якірного ланцюга, Гн; kФ, - конструктивна стала двигуна, Вб; Тп - стала часу перетворювача в ланцюзі якоря, с. Te = L e/Re - електромагнітна стала часу якірного ланцюга, с; у * - відносне значення завдання на струм якірного ланцюга; 2 у1 - відносне значення кутової швидкості обертання двигуна; у2 - відносне значення струму якірного ланцюга; у3 - відносне значення напруги якоря відповідно; uу wд Ід Е ; у3 = п ; U = у1 = ; у2 = , w дm І дm Епm u уm wд - швидкість двигуна, с-1; U -1 wдm = яm швидкість ідеального холостого ходу двигуна, с . kФ І я - струм якоря, А; U I яm = яm - струм короткого замикання двигуна при Uяm, А; Re Еп - електрорушійна сила перетворювача, В; Епm - максимальна електрорушійна сила перетворювача, В; U - відносне значення напруги завдання контуру швидкості; uу - напруга керування перетворювача, В; uym - максимальна напруга керування перетворювача, В; Uяm - максимальна напруга якоря, В. Для одержання заданої характеристики струму в режимі струмообмеження необхідне значення коефіцієнта підсилення визначається з виразу: 1- e ˆ g2 = , e(Т п + Т м ) де e - задана відносна статична помилка регулювання струму. Для режиму динамічного навантаження закони зміни швидкості та струму якоря можна записати узагальненими залежностями w(t ) = w0 + wm sin(W m t ), I я (t ) = I0 + Im sin(W m t + Y ), де w(t) - закони зміни швидкості; I я(t) - закони зміни струму; w 0 - технологічна швидкість двигуна, c-1; w m; t - час перехідного процесу; I 0 - постійна складова струму якоря (струм холостого ходу); Im - змінні складові кутовий швидкості обертання і струму якоря відповідно, Wm - кругова частота змінної складової, y - кут зсуву змінної складової струму щодо змінної складової швидкості обертання. Кінцевою метою операції формування технологічного навантаження є визначення закону зміни напруги живлення двигуна, що забезпечує задані залежності w (t) і I я(t). U(t)=U0+Umsin(Wmt+q), де U(t) - закон зміни напруги живлення двигуна; U0 - постійна складова напруги живлення досліджуваного двигуна. В; U0=I 0Re+kФФ0, Um - амплітудне значення змінної складової напруги живлення досліджуваного двигуна, В; æ 1 ö ÷, Um = Im R 2 + ç W m L e e ç W mC ÷ ø è Wm @ 1 Le × C = kF Le × J , C= J (k F )2 - еквівалентна ємність, Ф; q - кут зсуву динамічної складової напруги живлення щодо динамічної складової швидкості обертання. При відомих параметрах навантажувальної діаграми і струму холостого ходу можна визначити амплітуду змінної складової струму: ( ) Im = 2 I2 - I 2 , e 0 де I e - ефективне значення струму на заданій ділянці навантажувальної діаграми, А. При формуванні технологічного навантаження в ході іспитів необхідно враховувати той факт, що реальний технологічний механізм має значно більшу інерційність, ніж випробуваний двигун. Тому для дотримання реальної тахограми швидкості випробування необхідно здійснювати при ослабленому потоці, який можна визначити за формулою w - wн J× к t , kF = I яд - І0 де w к, w н - кінцеве і початкове значення швидкості на ділянці розгону (гальмування), І яд - припустимий струм якоря на заданій ділянці, А. Обмотка збудження двигуна має більшу інерційність, ніж якірний ланцюг, зміна магнітного потоку від номінального значення в режимах динамічного навантаження до ослабленого значення в перехідних режимах і навпаки повинне супроводжуватися форсуванням напруги в ланцюзі збудження, що призводить до необхідності ускладнення системи керування по ланцюгу збудження. Тому динамічне навантаження також здійснюється при ослабленому потоці. Відповідні параметри динамічного навантаження перераховуються з урахуванням значення ослабленого магнітного потоку. Оскільки в алгоритм керування контуру струму входить зворотний зв'язок за кутовою швидкістю обертання двигуна, то коефіцієнт передачі даного зворотного зв'язку також повинен бути скорегований на величину kF b= , kFн де b - корегуючий коефіцієнт передачі зворотного зв'язку; kF н - номінальна конструктивна стала двигуна, Вб. Струм холостого ходу в загальному випадку є складною функцією, що залежить від швидкості обертання двигуна. Невірне визначення струму холостого ходу в процесі навантаження призводить до того, що реальне ефективне значення струму буде відрізнятися від розрахункового. Причому ця відмінність у процентному відношенні до заданого буде тим більше, чим менше задане значення. Крім того помилкове визначення струму холостого ходу спричиняє також зміну статичного падіння середньої швидкості ( ) ( ) R e × I0 - I'0 , kF для компенсації якого потрібно змінити постійну складову напруги живлення на величину Dw = DU = Re × I0 - I'0 , де Dw - статичне падіння середньої швидкості; DU - змінна величина постійної складової напруги живлення; I0 i I'0 - реальне і розрахункове значення струму холостого ходу, А. З метою усунення невідповідності режимів випробування заданим технологічним умовам система регулювання доповнена блоком визначення струму холостого ходу, що дозволяє розрахувати його автономно в процесі навантаження і скорегувати відповідно до цього закони керування: сигнал з датчика струму надходить на обчислювальний пристрій, де відбувається зсув його по фазі на 0,5 періоду Т=1/Wm Далі сигнал додається до вхідного, що дозволяє одержати подвійне значення струму холостого ходу, визначається уточнена амплітуда змінної складової струму, розраховуються поточні значення змінної і постійної складових напруги якоря для підтримки необхідного ефективного струму якоря і середньої швидкості. При випробуванні електричної машини крім дотримання діаграм струму та швидкості необхідно також, щоб виконувалась умова і теплового режиму, тобто втрати енергії машини повинні знаходитись в гранично допустимих межах порівняно з відповідними втратами при технологічному процесі. Ослаблення магнітного потоку, а відповідно і струму збудження, незмінно призведе до зменшення втрат енергії, зв'язаних із процесом перемагнічування сталі якоря Тц DWст(t )B = ò (а I 2 1 з ) + a 2Iз × u(t ) + a3 u2 (t ) dt, 0 а також сумарних втрат енергії в міді машини ( ) DWмт = І 2 × R я + І2 × R з × Тц е з , DWст (t )B - зменшення втрат енергії, Вт; де а1, а2, а3 - постійні коефіцієнти; u(t) - напруга на якорі двигуна; Rз - опір обмотки збудження, Ом; DW МТ - сумарні втрати енергії в міді машини, Вт; І з - струм збудження, А; Тц - час циклу роботи, с. Для електричних машин з примусовою вентиляцією компенсацію втрат енергії необхідно виконувати за рахунок керування режимом роботи охолоджуючого вентилятора шляхом зміни кількості охолоджуючого повітря DWå B , QB = QТ × DWå Т де QB - кількість охолоджуючого повітря, м3; QТ - кількість охолоджуючого повітря в технологічному режимі, м3; DW å B - сумарні втрати енергії в технологічному режимі, Вт; DW å Т - сумарні втрати в режимі випробування, Вт. Продуктивність вентилятора пропорційна частоті живлення DWå B , fB = f т × DWå Т де fВ - продуктивність вентилятора; f Т, - частота живлення мережі, Гц. Тоді швидкість обертання вентилятора розраховується по формулі DW å B 2p æ ç fТ × ç DW å Т pp è ö ÷, ÷ ø де w В - швидкість обертання вентилятора, с-1; рр - число пар полюсів асинхронного двигуна. Пристрій для формування технологічного навантаження представлений на Фіг.4. Машина постійного струму 1 через датчик струму якоря 4 підключена до перетворювача 2, паралельно якому включений датчик напруги 3. Обмотка збудження електричної машини під'єднана через датчик струму збудження 5 до керованого збуджувача 6, напругу якого вимірює датчик 7. Швидкість обертання вентилятора 11 контролюється датчиком 14. Сигнали з датчиків струму якоря 4, напруги якоря 3, струму збудження 5, напруги збудження 7, швидкості обертання 8, продуктивності 14, температури 15 надходять на входи 1-7 обчислювального блоку (ОБ) 16, який через системи управління 12, 13 і 9 здійснює керування перетворювачами 2, 6, 10 відповідно, а також опрацьовує отримані сигнали й дані, введення яких виконується за допомогою блоку 17 та виводить результати на блок візуалізації 18. Блок-схема обчислювального блоку пристрою навантаження з системою регулювання, що реалізує автономне визначення струму холостого ходу 12 представлена на Фіг.5. Сигнали напруги (UЯ) якірної обмотки, напруги (UВ) та струму (I В) обмотки збудження, швидкості обертання двигуна (w Я), кількості охолоджуючого повітря (QФ ) та фактичної температури навколишнього середовища (Тпф) з відповідних датчиків надходять на блок вторинних датчиків 19, з виходу якого сигнали у вигляді напруг, еквівалентних вхідним величинам, за допомогою ключа, в якості якого використовується аналоговий мультиплексом 20, та плати аналого-цифрового перетворення 21 передаються до електронно-обчислювальної машини 22, де проводиться розрахунок сигналів, які в свою чергу через блок цифро-аналогового перетворення 23 та ключа 24, в якості якого використовується аналоговий демультиплексор, надходять на відповідні підсилюючі блоки 25 та 26, з виходів яких вони у вигляді керуючих сигналів напруг завдання обмотки збудження (UВЗ(t) та кількості охолоджуючого повітря (UQ3(t)) передаються до систем управління 13 та 9 відповідно. Електронно-обчислювальна машина 22 контролює узгодженість роботи блоків 20-24. Сигнал струму (І Я) якірної обмотки через блок вторинних датчиків 19 надходить до блоку визначення струму холостого ходу 29, в якому відбувається зсув його по фазі на півперіоду, та додавання з початковим сигналом, завдяки чому можливо отримати подвійне значення струму холостого ходу. Після чого відбувається уточнення амплітуди змінної складової струму та розраховуються поточні значення постійної та змінної складових напруги якоря з урахуванням ослабленого магнітного потоку. На ділянках розгону (гальмування) використовується регулятор струму 28, оптимізований на основі модифікованого принципу симетрії, працюючий у режимі струмообмеження. Напруга завдання регулятора струму 28 формується як різниця заданого та поточного значень струму (блок 27). За допомогою електронно-обчислювальної машини 22 відповідний сигнал завдання напруги wВ = * (Uяy(t)), або сигнал завдання на максимально допустимий струм якірного ланцюгу ( Iiя ) надходить до логічного переключаючого пристрою 30, який виконує перемикання між режимами струмообмеження та динамічного навантаження в залежності від заданого алгоритму випробувань. Для забезпечення відпрацювання заданої тахограми швидкості та діаграми навантаження випробування виконуються при ослабленому, але незмінному магнітному потоку, що дозволяє уникнути необхідності компенсації інерційних властивостей обмотки збудження при зміні магнітного потоку від номінального до розрахункового значення та навпаки, компенсацію втрат енергії при зменшенні магнітного потоку виконується за рахунок керування режимом роботи вентилятора.
ДивитисяДодаткова інформація
Назва патенту англійськоюUnit for simulating load in testing direct-current electric machines
Автори англійськоюSerhiienko Serhii Anatoliiovych, Zachepa Yurii Volodymyrovych, Koval Vitalii Anatoliiovych
Назва патенту російськоюУстройство для имитации нагрузки при испытаниях электрических машин постоянного тока
Автори російськоюСергиенко Сергей Анатольевич, Зачепа Юрий Владимирович, Коваль Виталий Анатольевич
МПК / Мітки
МПК: G01R 31/24
Мітки: навантаження, технологічного, випробуванні, машин, пристрій, постійного, моделювання, струму
Код посилання
<a href="https://ua.patents.su/6-21805-pristrijj-dlya-modelyuvannya-tekhnologichnogo-navantazhennya-pri-viprobuvanni-mashin-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для моделювання технологічного навантаження при випробуванні машин постійного струму</a>
Спосіб моделювання технологічного навантаження при випробуванні машин постійного струму
Номер патенту: 70516
Опубліковано: 15.10.2004
Автори: Артеменко Артем Миколайович, Зачепа Юрій Володимирович, Скворцов Ігор Валерійович, Родькін Дмитро Йосипович, Мастєровий Віктор Яковлевич
МПК: G01R 31/24
Мітки: випробуванні, технологічного, моделювання, машин, постійного, спосіб, навантаження, струму
Формула / Реферат:
1. Спосіб навантаження електричного двигуна постійного струму незалежного збудження, що полягає в створенні струмового навантаження шляхом підключення якоря двигуна до джерела низькочастотної змінної напруги, вимірюванні швидкості та струму якоря, нормуванні розрахункового струмового навантаження шляхом зміни амплітуди та частоти низькочастотної змінної напруги, який відрізняється тим, що для підвищення достовірності процесу навантаження та...
Спосіб навантаження генераторів постійного струму незалежного збудження і пристрій для реалізації способу
Номер патенту: 49281
Опубліковано: 16.09.2002
Автори: Величко Тетяна Володимирівна, Чорний Олексій Петрович, Родькін Дмитро Йосипович, Бялобржеський Олексій Володимирович, Кривонос Сергій Анатолійович
МПК: G01R 31/24
Мітки: генераторів, збудження, струму, спосіб, постійного, незалежного, способу, реалізації, пристрій, навантаження
Формула / Реферат:
1. Спосіб навантаження генератора постійного струму незалежного збудження, який полягає в тому, що якір електричної машини підключають до керованого силового перетворювача через датчик струму якоря і датчик напруги, обмотку збудження підключають до збудника через датчик струму збудження і напруги збудження, контролюють параметри режиму навантаження, струм якоря, струм збудження, напругу якоря, напругу збудження, швидкість обертання, який...
Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення
Номер патенту: 40067
Опубліковано: 16.07.2001
Автори: Пасмурских Олександр Олексійович, Добрецов Володимир Валентинович, Величко Тетяна Володимирівна, Луговий Анатолій Васильович, Бялобржевський Олексій Володимирович, Родькін Дмитро Йосипович, Вошун Олексій Миколайович
МПК: G01R 31/34
Мітки: збудження, динамічного, незалежного, постійного, спосіб, струму, навантаження, двигуна, здійснення, пристрій
Формула / Реферат:
1. Спосіб динамічного навантаження двигуна постійного струму незалежного збудження, який полягає в тому, що якір двигуна живиться від регульованого джерела через датчик струму якоря, обмотка збудження живиться від регульованого джерела через датчик струму збудження, контролюються параметри режиму навантаження, струм якоря, напруга якоря, швидкість обертання якоря, який відрізняється тим, що задають залежності струму якоря та кутової швидкості...
Пристрій для поліпшення комутації колекторних електричних машин постійного струму
Номер патенту: 33504
Опубліковано: 15.02.2001
Автори: Іванов Олексій Борисович, Колб Андрій Антонович, Поляков Микола Георгійович
МПК: H02K 13/14
Мітки: пристрій, електричних, колекторних, струму, поліпшення, машин, постійного, комутації
Текст:
...і комутуючого потоку, виконаний на базі введених масштабного підсилювача і моделі комутуючого потоку, враховуючої розмагнічувальну дію вихрових струмів, вхід якої залучений до виходу датчика струму якоря, а вихід з'єднаний із першим входом масштабного підсилювача, другий вхід якого залучений до виходу датчика струму якоря, вихід масштабного підсилювача, пропорційний зазначеному сигналу керування, залучений до третього входу підсилювача, що...
Спосіб визначення меж зони безіскрової роботи колекторних електричних машин постійного струму
Номер патенту: 33503
Опубліковано: 15.02.2001
Автори: Іванов Олексій Борисович, Колб Андрій Антонович, Бешта Олександр Степанович
МПК: H02K 13/14
Мітки: меж, спосіб, струму, роботи, визначення, зони, електричних, колекторних, постійного, безіскрової, машин
Текст:
...меж зони безіскрової роботи, відповідно до винаходу, попередньо задають перехідний режим, що відповідає необхідному значенню струму якоря, а потім при цьому значенні струму якоря роблять багаторазово розгін і гальмування випробовуваної машини в режимі трьохперіодної діаграми швидкості й одночасно, змінюючи величину струму підживлення-відживлення, реєструють при кожному значенні струму якоря всі параметри, необхідні для побудови меж зони...
Попередній патент: Композиційний матеріал для бетонних виробів
Наступний патент: Магнітний сепаратор
Випадковий патент: Теплиця енергозберігаюча