Аероциклоплан
Формула / Реферат
Аероциклоплан з можливістю злітати вертикально, що має в складі транспортний засіб, підвішений на шарнірі, цапфа якого жорстко взаємодіє з транспортним засобом і шарнірною кулею, жорстко зв’язаною з каркасом, що взаємодіє з гідроциліндрами системи гідрокерування, на якому розміщена силова установка з редукторно-кривошипно-шатунним механізмом, який відрізняється тим, що силова установка взаємодіє з піднімальними площинами з клапанами через редукторно-кривошипно-шатунний механізм і проходить через центр кулі, що є складовою шарніра, на якому підвішений транспортний засіб.
Текст
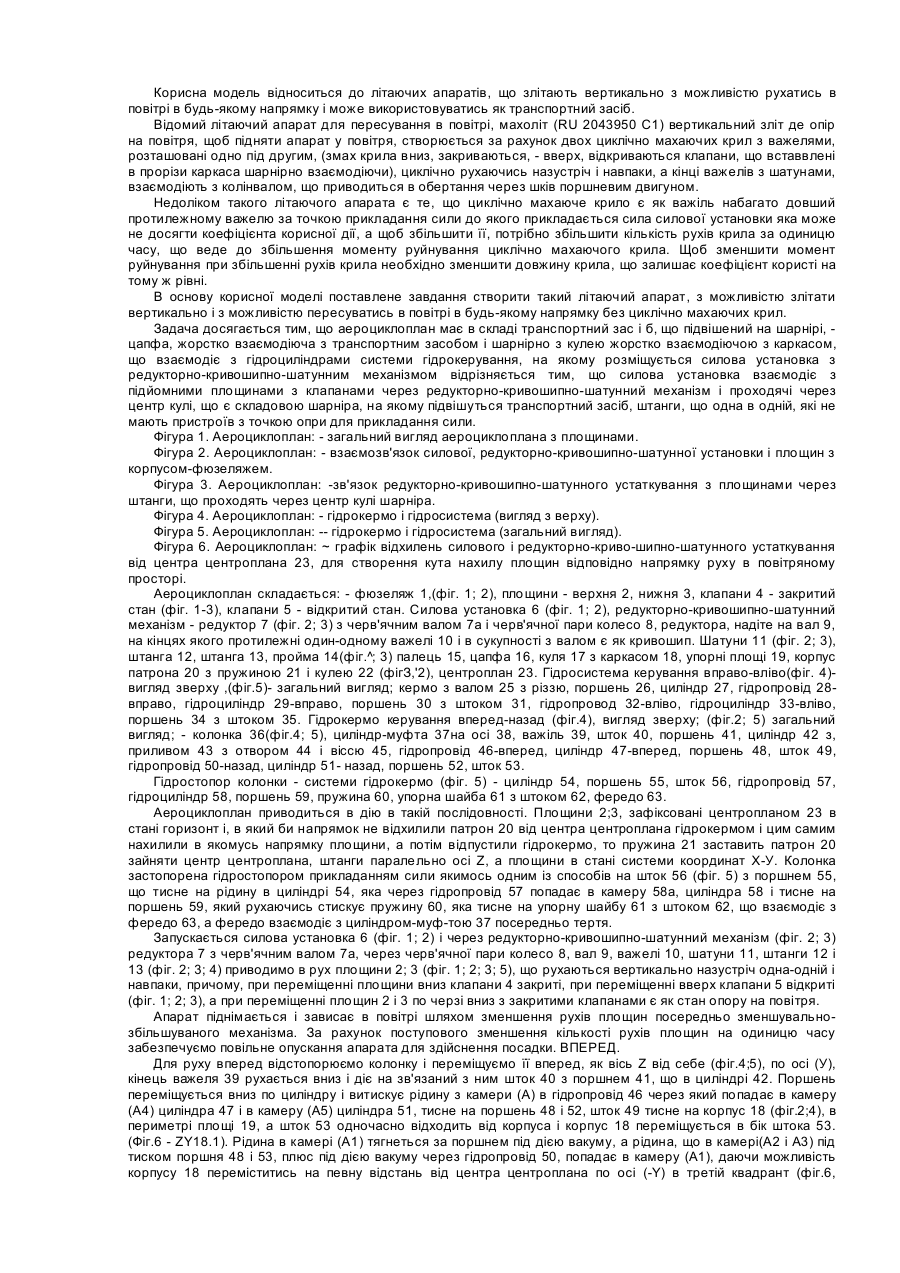
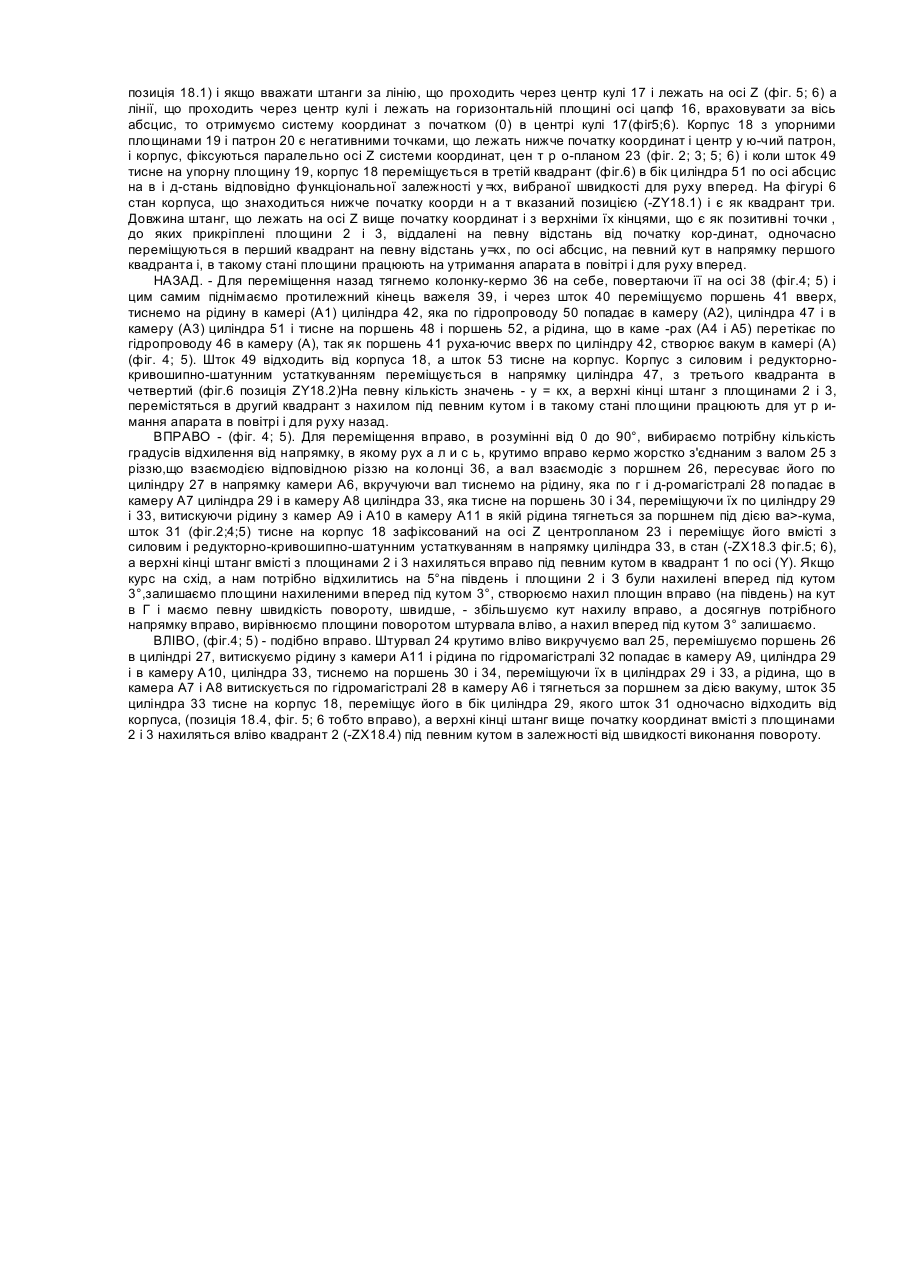
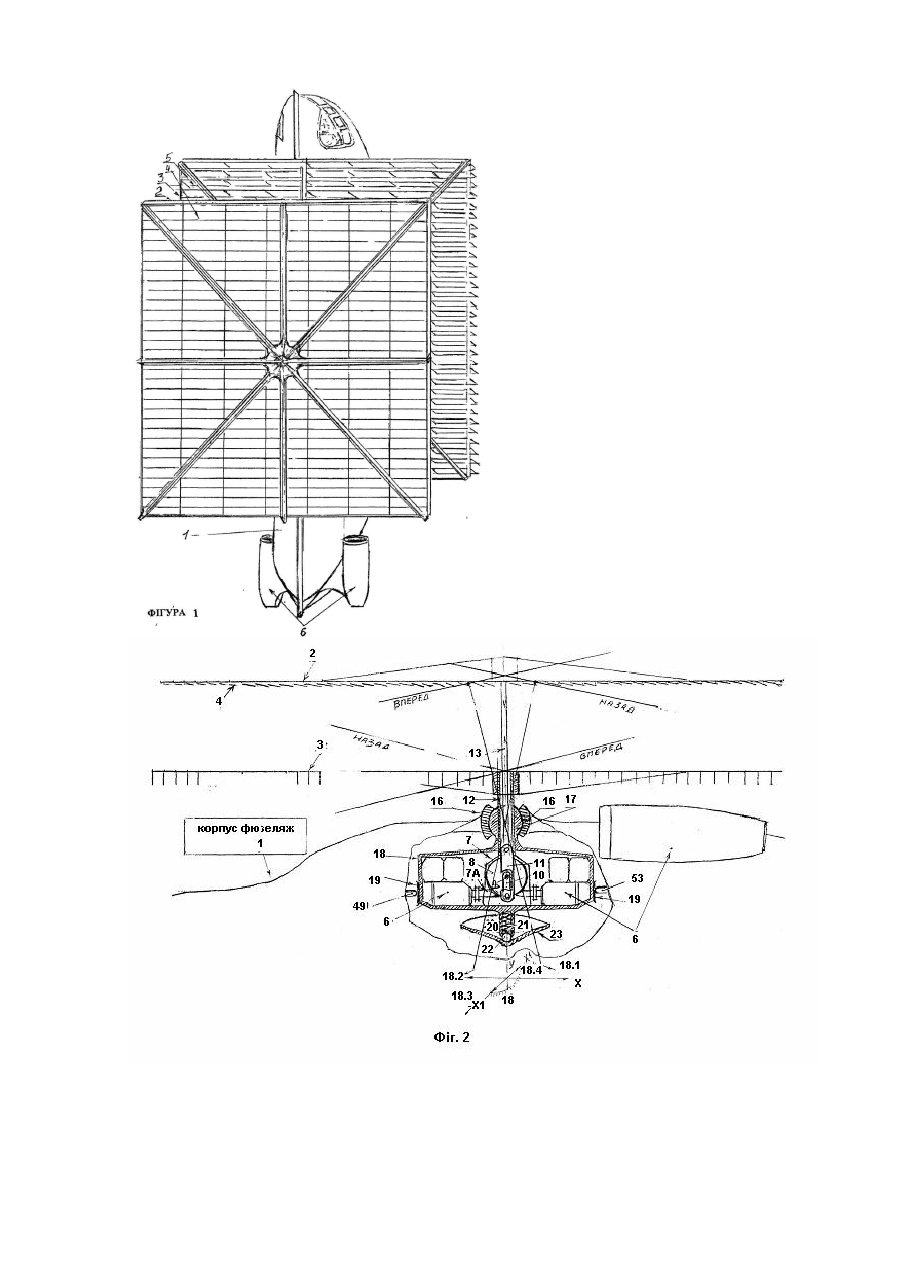
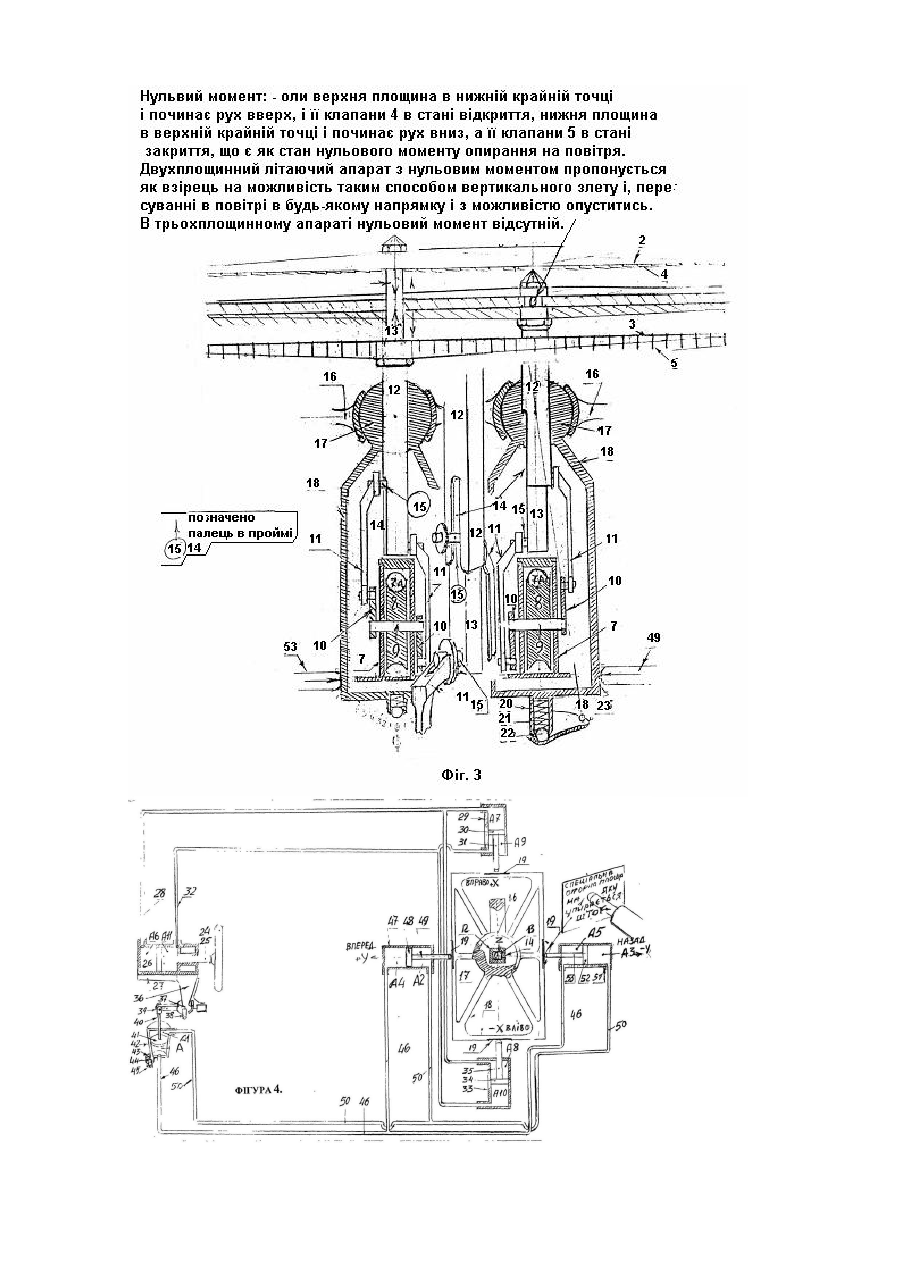
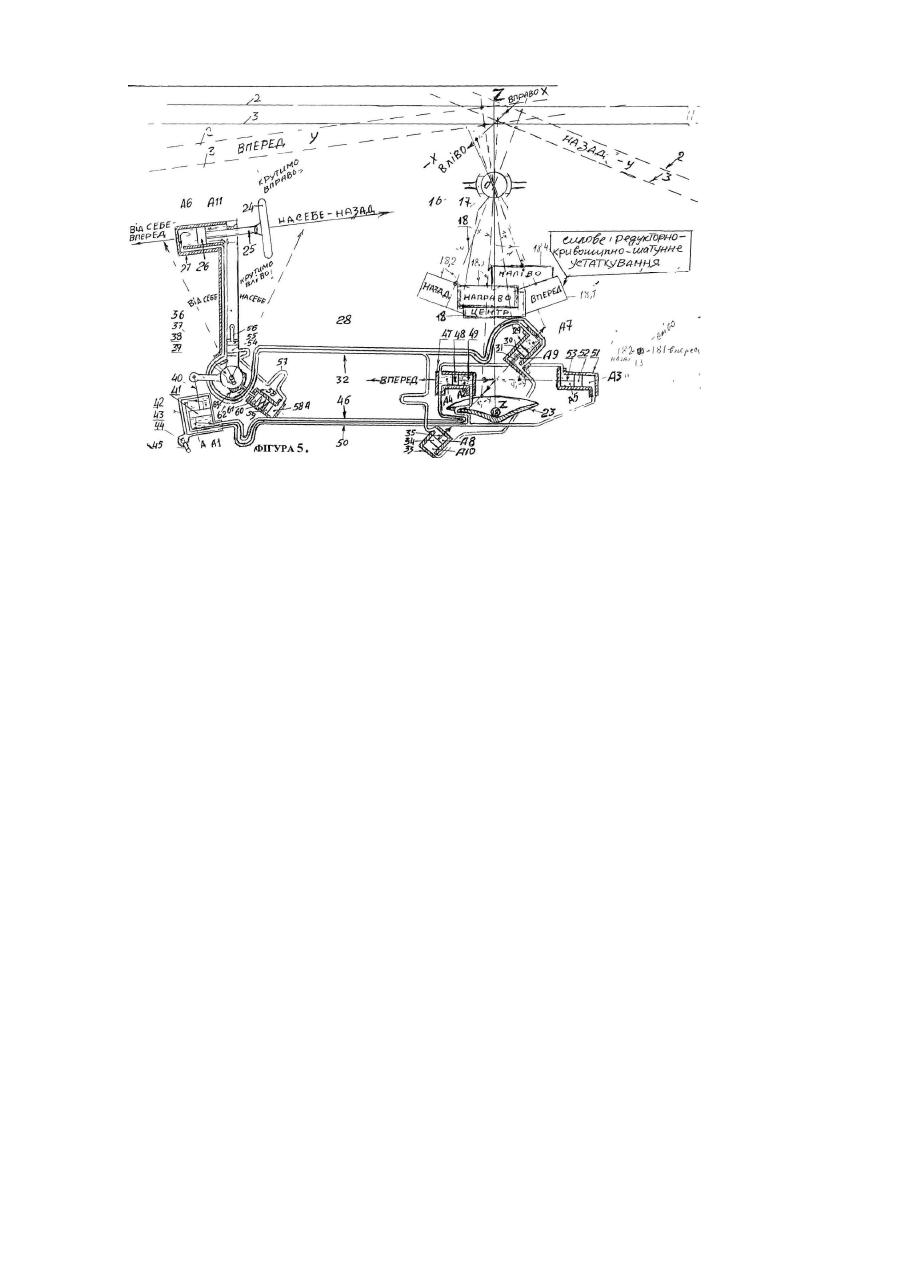
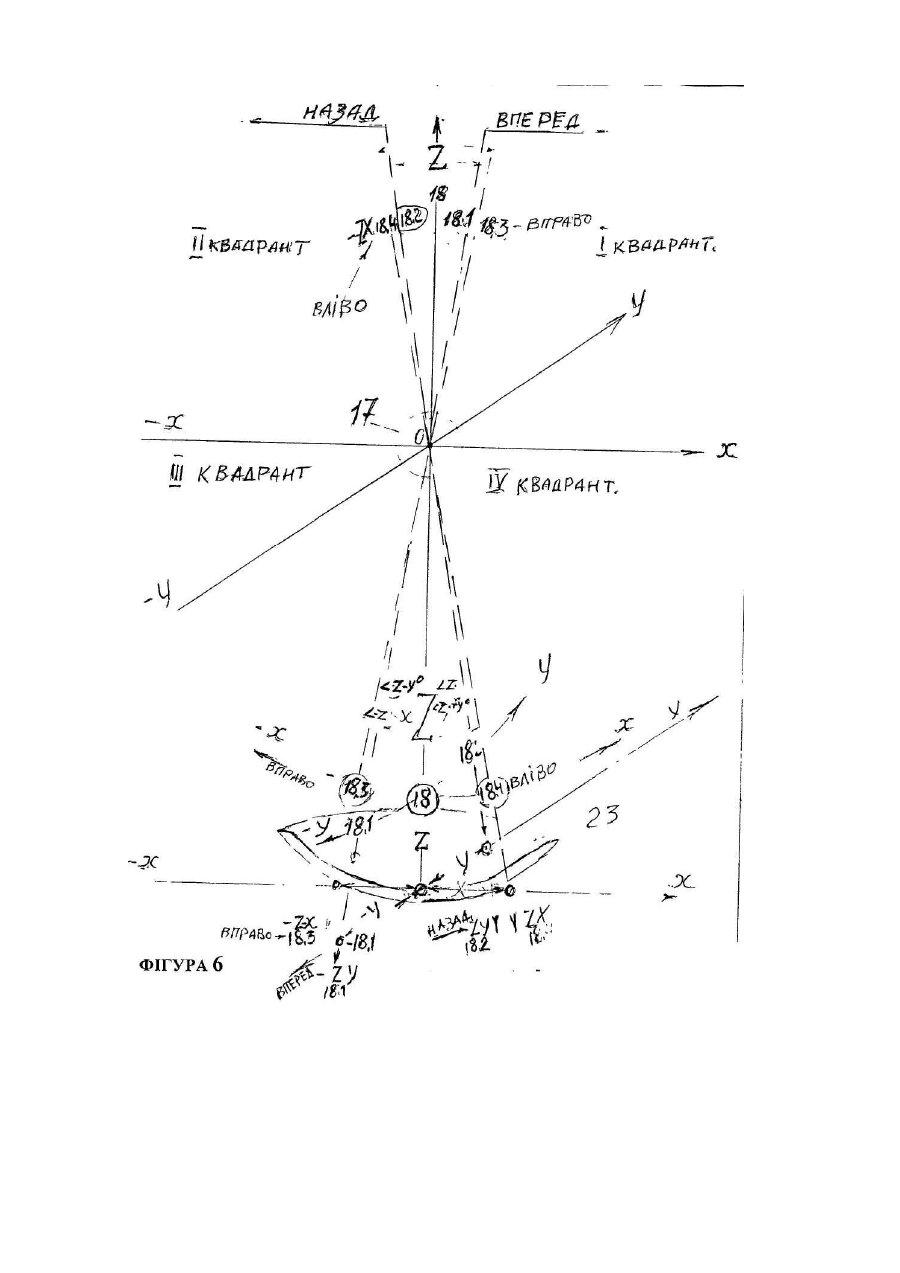
Корисна модель відноситься до літаючих апаратів, що злітають вертикально з можливістю рухатись в повітрі в будь-якому напрямку і може використовуватись як транспортний засіб. Відомий літаючий апарат для пересування в повітрі, махоліт (RU 2043950 С1) вертикальний зліт де опір на повітря, щоб підняти апарат у повітря, створюється за рахунок двох циклічно махаючих крил з важелями, розташовані одно під другим, (змах крила вниз, закриваються, - вверх, відкриваються клапани, що вставвлені в прорізи каркаса шарнірно взаємодіючи), циклічно рухаючись назустріч і навпаки, а кінці важелів з шатунами, взаємодіють з колінвалом, що приводиться в обертання через шків поршневим двигуном. Недоліком такого літаючого апарата є те, що циклічно махаюче крило є як важіль набагато довший протилежному важелю за точкою прикладання сили до якого прикладається сила силової установки яка може не досягти коефіцієнта корисної дії, а щоб збільшити її, потрібно збільшити кількість рухів крила за одиницю часу, що веде до збільшення моменту руйнування циклічно махаючого крила. Щоб зменшити момент руйнування при збільшенні рухів крила необхідно зменшити довжину крила, що залишає коефіцієнт користі на тому ж рівні. В основу корисної моделі поставлене завдання створити такий літаючий апарат, з можливістю злітати вертикально і з можливістю пересуватись в повітрі в будь-якому напрямку без циклічно махаючих крил. Задача досягається тим, що аероциклоплан має в складі транспортний зас і б, що підвішений на шарнірі, цапфа, жорстко взаємодіюча з транспортним засобом і шарнірно з кулею жорстко взаємодіючою з каркасом, що взаємодіє з гідроциліндрами системи гідрокерування, на якому розміщується силова установка з редукторно-кривошипно-шатунним механізмом відрізняється тим, що силова установка взаємодіє з підйомними площинами з клапанами через редукторно-кривошипно-шатунний механізм і проходячі через центр кулі, що є складовою шарніра, на якому підвішуться транспортний засіб, штанги, що одна в одній, які не мають пристроїв з точкою опри для прикладання сили. Фігура 1. Аероциклоплан: - загальний вигляд аероциклоплана з площинами. Фігура 2. Аероциклоплан: - взаємозв'язок силової, редукторно-кривошипно-шатунної установки і площин з корпусом-фюзеляжем. Фігура 3. Аероциклоплан: -зв'язок редукторно-кривошипно-шатунного устаткування з площинами через штанги, що проходять через центр кулі шарніра. Фігура 4. Аероциклоплан: - гідрокермо і гідросистема (вигляд з верху). Фігура 5. Аероциклоплан: -- гідрокермо і гідросистема (загальний вигляд). Фігура 6. Аероциклоплан: ~ графік відхилень силового і редукторно-криво-шипно-шатунного устаткування від центра центроплана 23, для створення кута нахилу площин відповідно напрямку руху в повітряному просторі. Аероциклоплан складається: - фюзеляж 1,(фіг. 1; 2), площини - верхня 2, нижня 3, клапани 4 - закритий стан (фіг. 1-3), клапани 5 - відкритий стан. Силова установка 6 (фіг. 1; 2), редукторно-кривошипно-шатунний механізм - редуктор 7 (фіг. 2; 3) з черв'ячним валом 7а і черв'ячної пари колесо 8, редуктора, надіте на вал 9, на кінцях якого протилежні один-одному важелі 10 і в сукупності з валом є як кривошип. Шатуни 11 (фіг. 2; 3), штанга 12, штанга 13, пройма 14(фіг.^; 3) палець 15, цапфа 16, куля 17 з каркасом 18, упорні площі 19, корпус патрона 20 з пружиною 21 і кулею 22 (фігЗ,'2), центроплан 23. Гідросистема керування вправо-вліво(фіг. 4)вигляд зверху ,(фіг.5)- загальний вигляд; кермо з валом 25 з різзю, поршень 26, циліндр 27, гідропровід 28вправо, гідроциліндр 29-вправо, поршень 30 з штоком 31, гідропровод 32-вліво, гідроциліндр 33-вліво, поршень 34 з штоком 35. Гідрокермо керування вперед-назад (фіг.4), вигляд зверху; (фіг.2; 5) загальний вигляд; - колонка 36(фіг.4; 5), циліндр-муфта 37на осі 38, важіль 39, шток 40, поршень 41, циліндр 42 з, приливом 43 з отвором 44 і віссю 45, гідропровід 46-вперед, циліндр 47-вперед, поршень 48, шток 49, гідропровід 50-назад, циліндр 51- назад, поршень 52, шток 53. Гідростопор колонки - системи гідрокермо (фіг. 5) - циліндр 54, поршень 55, шток 56, гідропровід 57, гідроциліндр 58, поршень 59, пружина 60, упорна шайба 61 з штоком 62, фередо 63. Аероциклоплан приводиться в дію в такій послідовності. Площини 2;3, зафіксовані центропланом 23 в стані горизонт і, в який би напрямок не відхилили патрон 20 від центра центроплана гідрокермом і цим самим нахилили в якомусь напрямку площини, а потім відпустили гідрокермо, то пружина 21 заставить патрон 20 зайняти центр центроплана, штанги паралельно осі Z, а площини в стані системи координат Х-У. Колонка застопорена гідростопором прикладанням сили якимось одним із способів на шток 56 (фіг. 5) з поршнем 55, що тисне на рідину в циліндрі 54, яка через гідропровід 57 попадає в камеру 58а, циліндра 58 і тисне на поршень 59, який рухаючись стискує пружину 60, яка тисне на упорну шайбу 61 з штоком 62, що взаємодіє з фередо 63, а фередо взаємодіє з циліндром-муф-тою 37 посередньо тертя. Запускається силова установка 6 (фіг. 1; 2) і через редукторно-кривошипно-шатунний механізм (фіг. 2; 3) редуктора 7 з черв'ячним валом 7а, через черв'ячної пари колесо 8, вал 9, важелі 10, шатуни 11, штанги 12 і 13 (фіг. 2; 3; 4) приводимо в рух площини 2; 3 (фіг. 1; 2; 3; 5), що рухаються вертикально назустріч одна-одній і навпаки, причому, при переміщенні площини вниз клапани 4 закриті, при переміщенні вверх клапани 5 відкриті (фіг. 1; 2; 3), а при переміщенні площин 2 і 3 по черзі вниз з закритими клапанами є як стан опору на повітря. Апарат піднімається і зависає в повітрі шляхом зменшення рухів площин посередньо зменшувальнозбільшуваного механізма. За рахунок поступового зменшення кількості рухів площин на одиницю часу забезпечуємо повільне опускання апарата для здійснення посадки. ВПЕРЕД. Для руху вперед відстопорюємо колонку і переміщуємо її вперед, як вісь Z від себе (фіг.4;5), по осі (У), кінець важеля 39 рухається вниз і діє на зв'язаний з ним шток 40 з поршнем 41, що в циліндрі 42. Поршень переміщується вниз по циліндру і витискує рідину з камери (А) в гідропровід 46 через який попадає в камеру (А4) циліндра 47 і в камеру (А5) циліндра 51, тисне на поршень 48 і 52, шток 49 тисне на корпус 18 (фіг.2;4), в периметрі площі 19, а шток 53 одночасно відходить від корпуса і корпус 18 переміщується в бік штока 53. (Фіг.6 - ZY18.1). Рідина в камері (А1) тягнеться за поршнем під дією вакуму, а рідина, що в камері(А2 і A3) під тиском поршня 48 і 53, плюс під дією вакуму через гідропровід 50, попадає в камеру (А1), даючи можливість корпусу 18 переміститись на певну відстань від центра центроплана по осі (-Y) в третій квадрант (фіг.6, позиція 18.1) і якщо вважати штанги за лінію, що проходить через центр кулі 17 і лежать на осі Z (фіг. 5; 6) а лінії, що проходить через центр кулі і лежать на горизонтальній площині осі цапф 16, враховувати за вісь абсцис, то отримуємо систему координат з початком (0) в центрі кулі 17(фіг5;6). Корпус 18 з упорними площинами 19 і патрон 20 є негативними точками, що лежать нижче початку координат і центр у ю-чий патрон, і корпус, фіксуються паралельно осі Z системи координат, цен т р о-планом 23 (фіг. 2; 3; 5; 6) і коли шток 49 тисне на упорну площину 19, корпус 18 переміщується в третій квадрант (фіг.6) в бік циліндра 51 по осі абсцис на в і д-стань відповідно функціональної залежності у =кх, вибраної швидкості для руху вперед. На фігурі 6 стан корпуса, що знаходиться нижче початку коорди н а т вказаний позицією (-ZY18.1) і є як квадрант три. Довжина штанг, що лежать на осі Z вище початку координат і з верхніми їх кінцями, що є як позитивні точки , до яких прикріплені площини 2 і 3, віддалені на певну відстань від початку кор-динат, одночасно переміщуються в перший квадрант на певну відстань у=кх, по осі абсцис, на певний кут в напрямку першого квадранта і, в такому стані площини працюють на утримання апарата в повітрі і для руху вперед. НАЗАД. - Для переміщення назад тягнемо колонку-кермо 36 на себе, повертаючи її на осі 38 (фіг.4; 5) і цим самим піднімаємо протилежний кінець важеля 39, і через шток 40 переміщуємо поршень 41 вверх, тиснемо на рідину в камері (А1) циліндра 42, яка по гідропроводу 50 попадає в камеру (А2), циліндра 47 і в камеру (A3) циліндра 51 і тисне на поршень 48 і поршень 52, а рідина, що в каме -pax (А4 і А5) перетікає по гідропроводу 46 в камеру (А), так як поршень 41 руха-ючис вверх по циліндру 42, створює вакум в камері (А) (фіг. 4; 5). Шток 49 відходить від корпуса 18, а шток 53 тисне на корпус. Корпус з силовим і редукторнокривошипно-шатунним устаткуванням переміщується в напрямку циліндра 47, з третього квадранта в четвертий (фіг.6 позиція ZY18.2)Ha певну кількість значень - у = кх, а верхні кінці штанг з площинами 2 і 3, перемістяться в другий квадрант з нахилом під певним кутом і в такому стані площини працюють для ут р имання апарата в повітрі і для руху назад. ВПРАВО - (фіг. 4; 5). Для переміщення вправо, в розумінні від 0 до 90°, вибираємо потрібну кількість градусів відхилення від напрямку, в якому рух а л и с ь, крутимо вправо кермо жорстко з'єднаним з валом 25 з різзю,що взаємодією відповідною різзю на колонці 36, а вал взаємодіє з поршнем 26, пересуває його по циліндру 27 в напрямку камери А6, вкручуючи вал тиснемо на рідину, яка по г і д-ромагістралі 28 попадає в камеру А7 циліндра 29 і в камеру А8 циліндра 33, яка тисне на поршень 30 і 34, переміщуючи їх по циліндру 29 і 33, витискуючи рідину з камер А9 і А10 в камеру А11 в якій рідина тягнеться за поршнем під дією ва>-кума, шток 31 (фіг.2;4;5) тисне на корпус 18 зафіксований на осі Z центропланом 23 і переміщує його вмісті з силовим і редукторно-кривошипно-шатунним устаткуванням в напрямку циліндра 33, в стан (-ZX18.3 фіг.5; 6), а верхні кінці штанг вмісті з площинами 2 і 3 нахиляться вправо під певним кутом в квадрант 1 по осі (Y). Якщо курс на схід, а нам потрібно відхилитись на 5°на південь і площини 2 і З були нахилені вперед під кутом 3°,залишаємо площини нахиленими вперед під кутом 3°, створюємо нахил площин вправо (на південь) на кут в Г і маємо певну швидкість повороту, швидше, - збільшуємо кут нахилу вправо, а досягнув потрібного напрямку вправо, вирівнюємо площини поворотом штурвала вліво, а нахил вперед під кутом 3° залишаємо. ВЛІВО, (фіг.4; 5) - подібно вправо. Штурвал 24 крутимо вліво викручуємо вал 25, перемішуємо поршень 26 в циліндрі 27, витискуємо рідину з камери A11 і рідина по гідромагістралі 32 попадає в камеру А9, циліндра 29 і в камеру А10, циліндра 33, тиснемо на поршень 30 і 34, переміщуючи їх в циліндрах 29 і 33, а рідина, що в камера А7 і А8 витискується по гідромагістралі 28 в камеру А6 і тягнеться за поршнем за дією вакуму, шток 35 циліндра 33 тисне на корпус 18, переміщує його в бік циліндра 29, якого шток 31 одночасно відходить від корпуса, (позиція 18.4, фіг. 5; 6 тобто вправо), а верхні кінці штанг вище початку координат вмісті з площинами 2 і 3 нахиляться вліво квадрант 2 (-ZX18.4) під певним кутом в залежності від швидкості виконання повороту.
ДивитисяДодаткова інформація
Назва патенту англійськоюAerocycloplan
Автори англійськоюYasynovyi Anatolyii Serhiiovych
Назва патенту російськоюАэроциклоплан
Автори російськоюЯсиновый Анатолий Сергеевич
МПК / Мітки
МПК: B64C 31/00
Мітки: аероциклоплан
Код посилання
<a href="https://ua.patents.su/6-23686-aerocikloplan.html" target="_blank" rel="follow" title="База патентів України">Аероциклоплан</a>
Магнітна поршнева машина

Номер патенту: 51265
Опубліковано: 15.11.2002
Автори: Рибалко Валерій Вікторович, Міхайлюк Василь Петрович
МПК: F01B 13/00
Мітки: машина, магнітна, поршнева
Формула / Реферат:
Магнітна поршнева машина, що містить циліндр, в якому розміщений з можливістю поступального руху поршень зі штоком, яка відрізняється тим, що циліндр виготовлено з немагнітного матеріалу, а поршень являє собою постійний магніт, який розташований між двома магнітними головками, що розміщені в циліндрі і звернені до поршня однорідними полюсами, при цьому принаймні одна із двох залізних тягових пластин, що жорстко з'єднані між собою,...
Амортизатор
Номер патенту: 33582
Опубліковано: 15.02.2001
Автори: Шевченко Микола Іванович, Токарєв Олексій Захарович, Хорунжий Володимир Дмитрович, Шевченко Владислав Миколайович
МПК: F16F 9/00
Мітки: амортизатор
Текст:
...дії 12. Порожнини 8 і 5 також з'єднані з резервуаром 13 для зарядки робочою рідиною з допомогою трубопроводів 14 і 15, які з'єднані між собою і підключені до гідравлічного насосу 16 трубопроводом 17, на якому стоїть клапан запобіжний 18. На трубопроводах 14 і 15 установлено гідророзподілювачі 19 двохпозиційні, а між собою трубопроводи 14 і 15 з'єднані через клапан зворотний 20 і клапан тиску 21, які розміщені на трубопроводі 22. Амортизатори...
Пневматичний циліндр
Номер патенту: 1829
Опубліковано: 15.05.2003
Автор: Дольберг Володимир Ісаакович
МПК: F16J 10/00
Мітки: пневматичний, циліндр
Формула / Реферат:
Пневматичний циліндр, що містить корпус, поршень, шток, зворотну пружину, ущільнюючий елемент, який відрізняється тим, що поршень, виконаний з полімеру, з’єднаний зі штоком литтям, при цьому поверхня поршня, що взаємодіє з ущільнюючим елементом, виконана відкритою і має на торцевій частині кільцеву призахідну фаску.
Поршневий компресор
Номер патенту: 53108
Опубліковано: 15.12.2004
Автори: Христенко Олександр Іванович, Христенко Іван Михайлович
МПК: F04B 31/00
Формула / Реферат:
Поршневий компресор, що містить два циліндри з спільною перегородкою з встановленими в них поршнями, що мають загальний шток та поділяють циліндри на надпоршневі та штокові камери, при цьому камери першого циліндра підключені через впускні клапани до впускної магістралі, камери другого циліндра через вихідні клапани підключені до нагнітальної магістралі, який відрізняється тим, що поршні виконані з можливістю приведення в рух за допомогою...
Двигун внутрішнього згоряння
Номер патенту: 1384
Опубліковано: 16.09.2002
Автор: Козоріз Леонід Михайлович
МПК: F01B 5/00
Мітки: двигун, внутрішнього, згоряння
Формула / Реферат:
Двигун внутрішнього згоряння, який містить корпус з принаймні одним циліндром, поршень, розміщений в циліндрі, і установлений в корпусі колінчастий вал, з'єднаний з поршнем шатуном, який відрізняється тим, що вісь колінчастого вала зміщена відносно осі циліндра.
Попередній патент: Раціон годівлі відлучених поросят
Наступний патент: Устаткування для здійснення пожежогасіння, особливо на високих спорудах, з можливістю цього устаткування запобігти падінню кабіни ліфта при пожежі
Випадковий патент: Пристрій для визначення часток