Спеціалізований тренажер функціональної системи транспортного засобу, зокрема системи керування вертольотом
Номер патенту: 24034
Опубліковано: 11.06.2007
Автори: Коваль Дмитро Орестович, Барвінок Дмитро Володимирович, Моцарь Анатолій Іванович, Моцарь Юрій Анатолійович, Моцар Петро Іванович, Моцарь Валерій Анатолійович, Зінченко Володимир Павлович, Матюха Володимир Михайлович, Сененко Руслан Григорович, Тупіков Костянтин Сергійович
Формула / Реферат
1. Спеціалізований тренажер функціональної системи транспортного засобу, зокрема системи керування вертольотом, виконаний у вигляді стенда, на якому розташовані блок візуалізації, що включає елементи функціональної системи і схему взаємозв'язків між ними, панель керування функціональною системою і блок живлення, при цьому блок візуалізації, панель керування функціональною системою і блок живлення з'єднані між собою, а схема взаємозв'язків між елементами функціональної системи виконана за допомогою імітаторів, що відображають зв'язки між ними при експлуатації її в штатному режимі і при виникненні відмов, який відрізняється тим, що на стенді додатково розміщені панель керування тренажером, блок демонстраційних механізмів і процесорний блок, панель керування тренажером виконана у вигляді набору перемикачів для його вмикання і вимикання і введення режимів відмов системи керування вертольотом, блок демонстраційних механізмів виконаний у вигляді елементів системи керування вертольотом, блок візуалізації включає елементи системи керування вертольотом, панель керування функціональною системою виконана у вигляді фрагментів відповідних штатних панелей керування і контролю системи керування вертольотом і/або у вигляді набору їх складових елементів, при цьому панель керування функціональною системою, панель керування тренажером, блок демонстраційних механізмів і блок візуалізації розміщені на лицьовій стороні стенда, панель керування тренажером зв'язана з процесорним блоком, який, у свою чергу, взаємозв'язаний з панеллю керування функціональною системою, а блок живлення з'єднаний із зазначеними панеллю керування функціональною системою, панеллю керування тренажером і процесорним блоком.
2. Спеціалізований тренажер за п. 1, який відрізняється тим, що елементи блока демонстраційних механізмів системи керування вертольотом виконані у вигляді штатних механізмів і/або їх деталей, і /або їх розрізів, і/або їх макетів, і/або їх зображень, наприклад у вигляді фотопланшетів і/або схем, і/або графічних малюнків.
3. Спеціалізований тренажер за п. 1, який відрізняється тим, що блок візуалізації включає щонайменше графічну схему системи керування вертольотом, виконану у вигляді графічного об'ємного малюнка вертольота з відображенням в масштабі розташованих на ньому органів керування в кабіні пілотів, двигунів, несучого і рульового гвинтів із зв'язками між ними за допомогою тяги проводки керування і здвоєної тросової проводки, при цьому схема зв'язків між ними виконана з можливістю відображення напряму і їх якісних параметрів за допомогою, наприклад, контрастного колірного рішення і/або світлодіодів, і/або інших світловипромінювальних елементів, і/або табло.
4. Спеціалізований тренажер за п. 1, який відрізняється тим, що блок демонстраційних механізмів включає щонайменше макет блока роликів, макет напрямних текстолітових колодок, фотопланшет важелів зупинки двигунів, макет електромагнітного гальма з пружинним механізмом завантаження, макети чотирьох тяг проводки керування, макет сектора шляхового керування з штоком гідропідсилювача, макети трьох качалок керування, макет напрямного кронштейна з роликами, макет електромеханізму перенастроювання обертів двигуна, макет ланцюга з частиною здвоєної тросової проводки, фотопланшет втулково-роликового ланцюга із зірочкою хвостового редуктора, графічний малюнок ручки керування гальмом несучого гвинта, фотопланшет ручки подовжньо-поперечного керування, графічний малюнок гашетки з мікровимикачем, фотопланшет лівої ручки керування Крок-Газ з важелями роздільного керування двигунами, фотопланшет педалі шляхового керування, графічний малюнок механізму рухомого упора з електромеханізмом, виконаний в розрізі, графічний малюнок механізму перенастроювання частоти обертання двигунів з електромеханізмом, виконаний в розрізі, і графічний малюнок гідроупора подовжнього керування, виконаний в розрізі, при цьому зазначений фотопланшет лівої ручки керування Крок-Газ з важелями роздільного керування двигунами включає макет перемикача перенастроювання обертів несучого гвинта, який виконаний активним і з'єднаний з процесорним блоком і блоком живлення.
5. Спеціалізований тренажер за п. 1, який відрізняється тим, що панель керування функціональною системою включає щонайменше фрагмент панелі керування з вимикачем системи рухомого упора керування на лівому щитку електропульта, фрагмент панелі блока керування системи рухомого упора керування на центральному пульті з кнопкою-табло відключення, поворотною ручкою контролю, натискним перемикачем і індикатором положення нуля, фрагменти панелі керування з циферблатним покажчиком кроку гвинта і з циферблатним покажчиком обертів несучого гвинта і фрагменти правої панелі автоматів захисту мережі системи керування з перемикачами керування обертами двигуна, фрикціона і електромуфт і системи рухомого упора керування.
6. Спеціалізований тренажер за п. 1, який відрізняється тим, що панель керування тренажером включає щонайменше вимикач тренажера і вимикач імітації відмови системи рухомого упора керування.
7. Спеціалізований тренажер за п. 1, який відрізняється тим, що процесорний блок включає цифровий модельний процесор з вбудованими пристроями для зберігання програми і оперативної пам'яті, виконаний з можливістю реалізації математичних моделей експлуатації системи керування вертольотом, у тому числі в штатному режимі і при виникненні відмов.
Текст
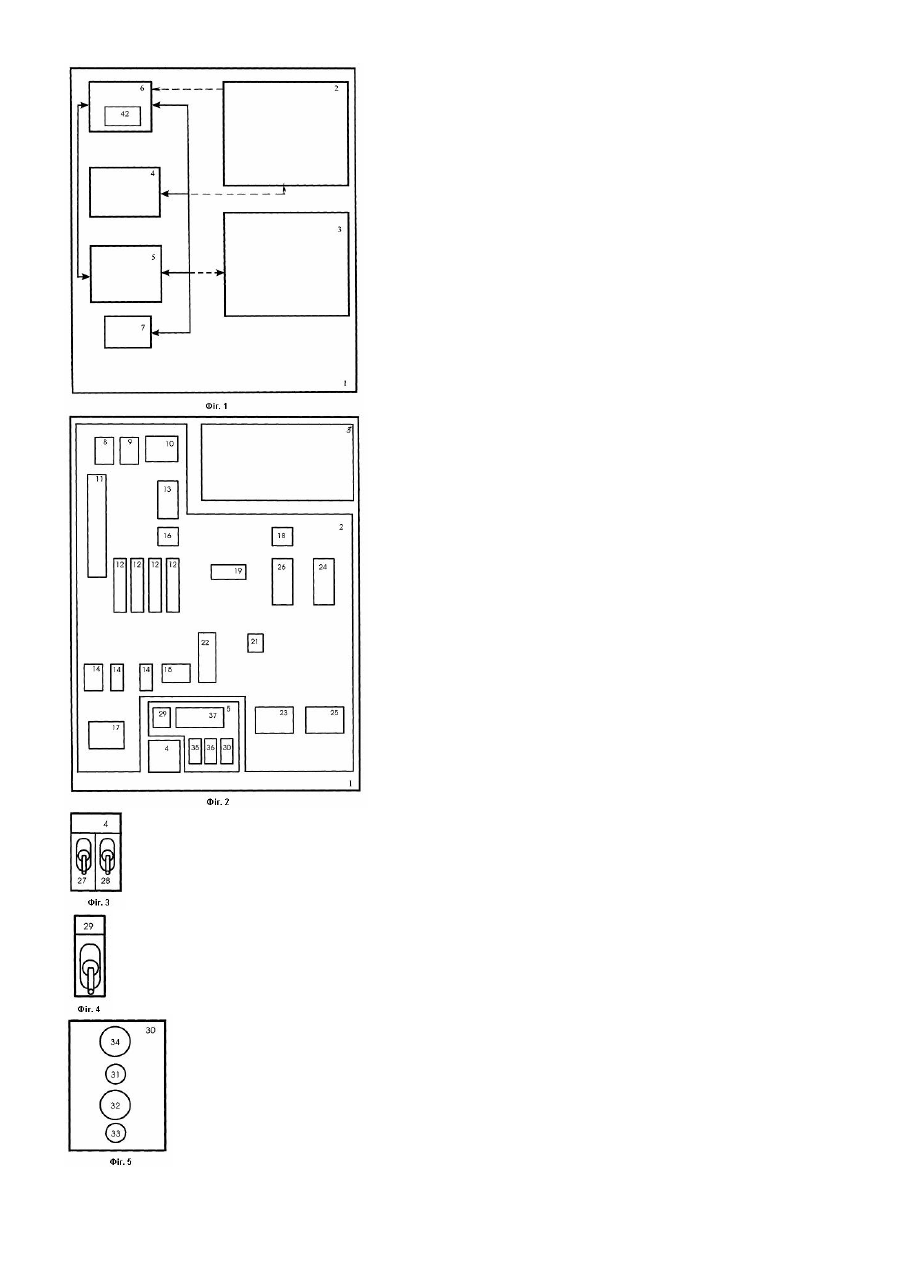
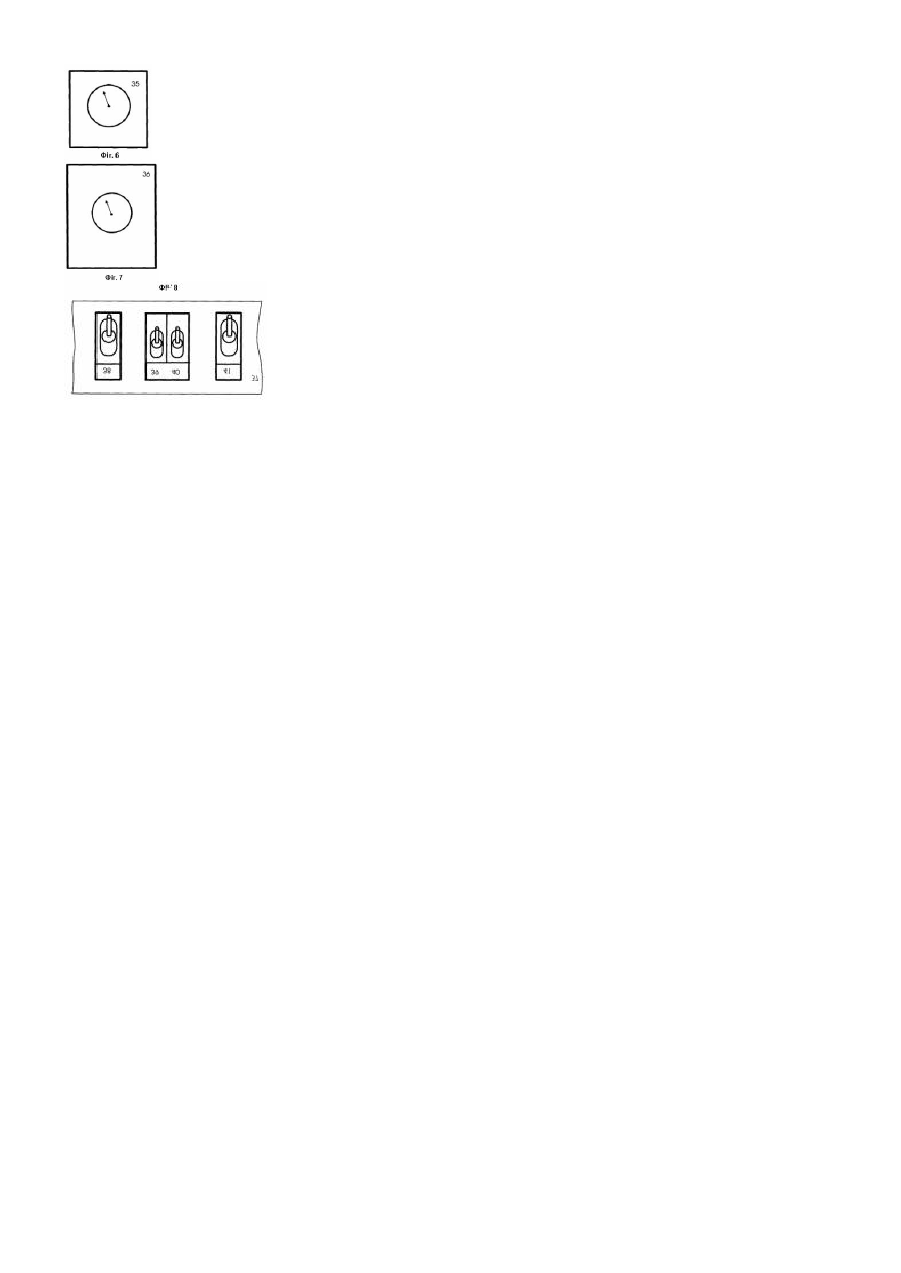
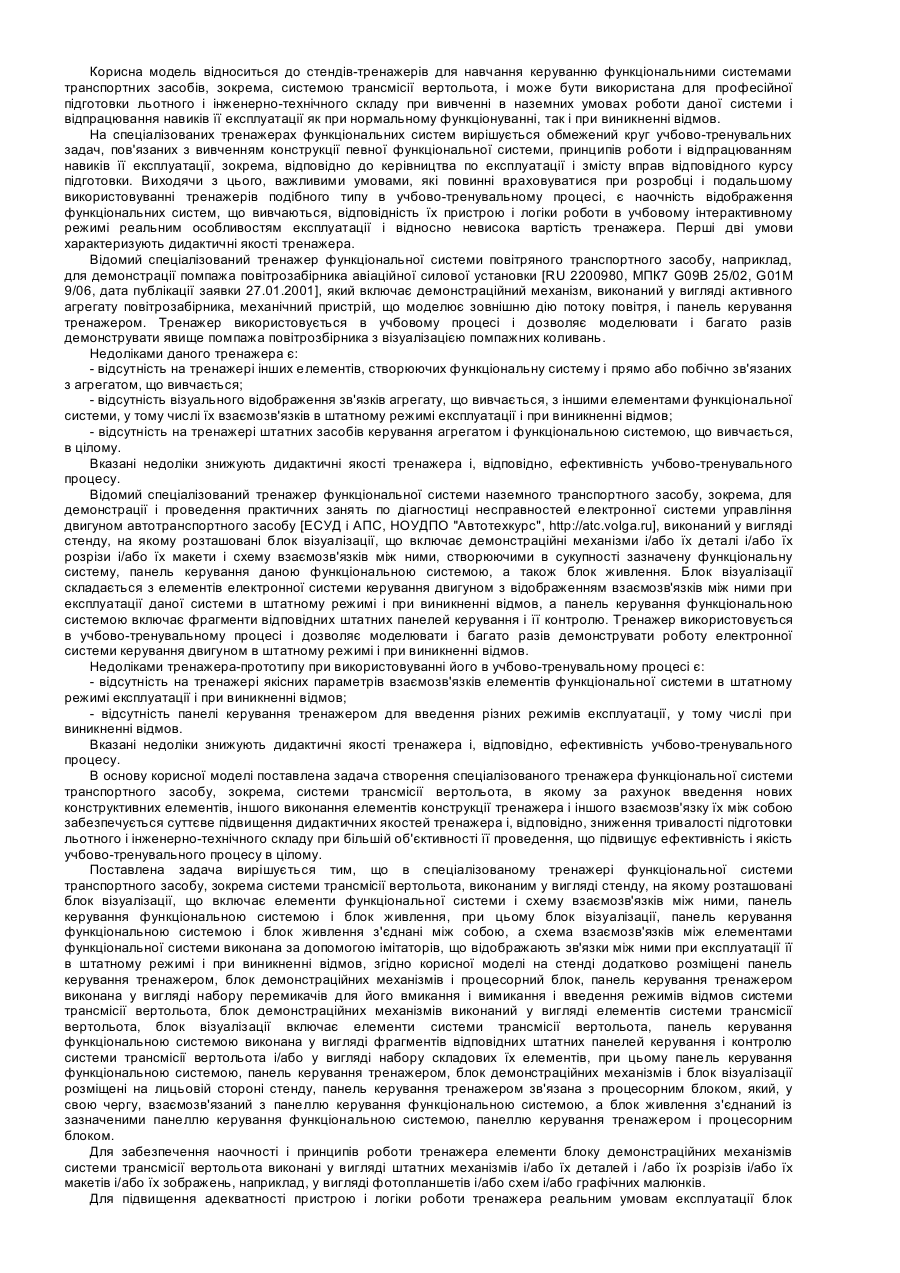
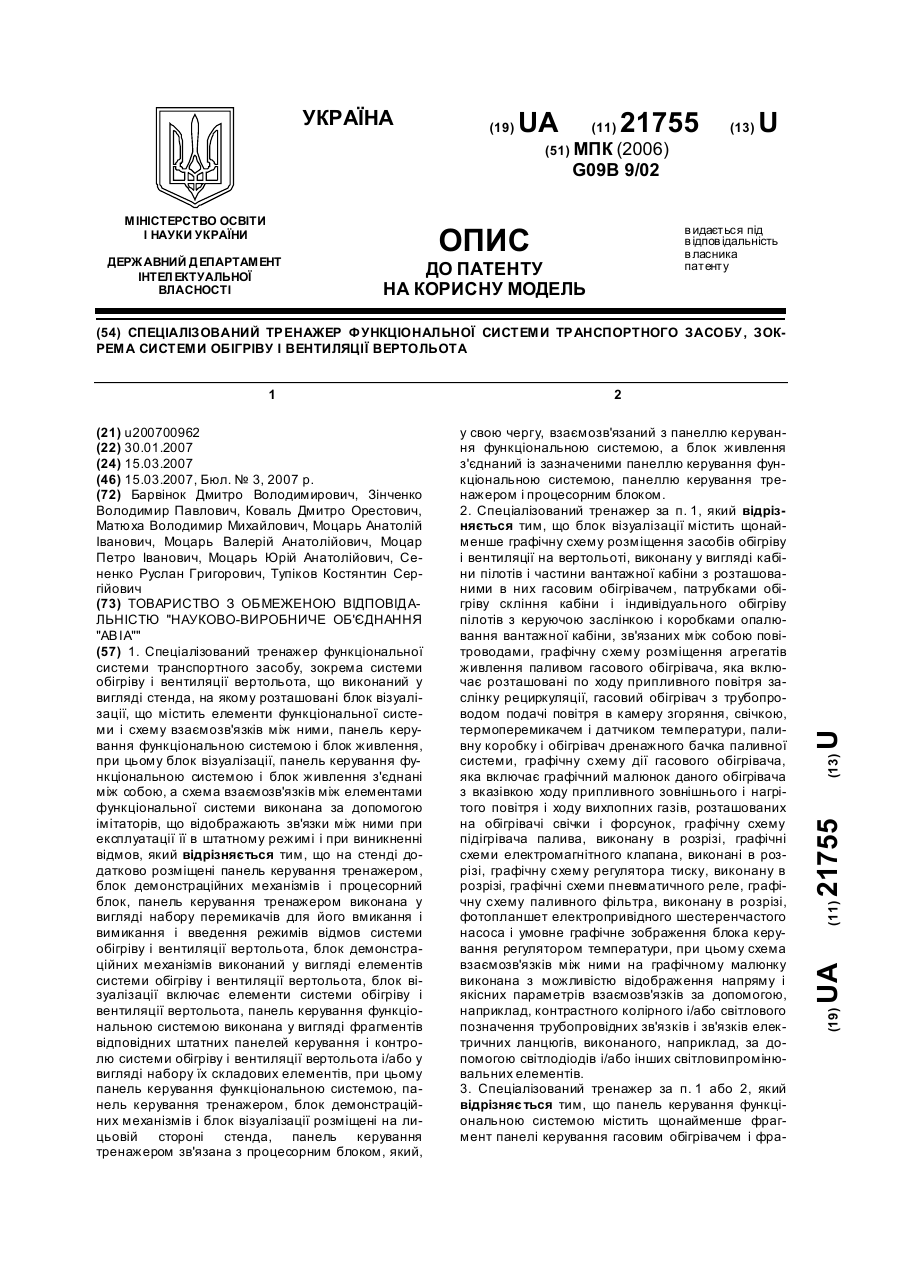
Корисна модель відноситься до стендів-тренажерів для навчання керуванню функціональними системами транспортних засобів, зокрема, системи керування вертольотом, і може бути використана для професійної підготовки льотного і інженерно-технічного складу при вивченні в наземних умовах роботи даної системи і відпрацювання навиків її експлуатації як при нормальному функціонуванні, так і при виникненні відмов. На спеціалізованих тренажерах функціональних систем вирішується обмежений круг учбово-тренувальних задач, пов'язаних з вивченням конструкції певної функціональної системи, принципів роботи і відпрацюванням навиків її експлуатації, зокрема, відповідно до керівництва по експлуатації і змісту вправ відповідного курсу підготовки. Виходячи з цього, важливими умовами, які повинні враховуватися при розробці і подальшому використовуванні тренажерів подібного типу в учбово-тренувальному процесі, є наочність відображення функціональних систем, що вивчаються, відповідність їх пристрою і логіки роботи в учбовому інтерактивному режимі реальним особливостям експлуатації і відносно невисока вартість тренажера. Перші дві умови характеризують дидактичні якості тренажера. Відомий спеціалізований тренажер функціональної системи повітряного транспортного засобу, наприклад, для демонстрації помпажа повітрозабірника авіаційної силової установки [RU 2200980, МПК7 G09B25/02, G01M9/06, дата публікації заявки 27.01.2001], який включає демонстраційний механізм, виконаний у вигляді активного агрегату повітрозабірника, механічний пристрій, що моделює зовнішню дію потоку повітря, і панель керування тренажером. Тренажер використовується в учбовому процесі і дозволяє моделювати і багато разів демонструвати явище помпажа повітрозабірника з візуалізацією помпажних коливань. Недоліками даного тренажера є: - відсутність на тренажері інших елементів, створюючих дану функціональну систему і прямо або побічно пов'язаних з агрегатом, що вивчається; - відсутність візуального відображення зв'язків агрегату, що вивчається, з іншими елементами даної функціональної системи, у тому числі їх взаємозв'язків в штатному режимі експлуатації і при виникненні відмов; - відсутність на тренажері штатних засобів керування агрегатом і даною функціональною системою, що вивчається, в цілому. Вказані недоліки знижують дидактичні якості тренажера і, відповідно, ефективність учбово-тренувального процесу. Відомий спеціалізований тренажер функціональної системи наземного транспортного засобу, зокрема, для демонстрації і проведення практичних занять по діагностиці несправностей електронної системи керування двигуном автотранспортного засобу [ЕСУД і АПС, НОУДПО "Автоте хкурс", http://atc.volga.ru], виконаний у вигляді стенду, на якому розташовані блок візуалізації, що включає демонстраційні механізми і/або їх деталі і/або їх розрізи і/або їх макети і схему взаємозв'язків між ними, створюючими в сукупності зазначену функціональну систему, панель керування даною функціональною системою, а також блок живлення. Блок візуалізації складається з елементів електронної системи керування двигуном з відображенням взаємозв'язків між ними при експлуатації даної системи в штатному режимі і при виникненні відмов, а панель керування зазначеною функціональною системою включає фрагменти відповідних штатни х панелей керування і її контролю. Тренажер використовується в учбово-тренувальному процесі і дозволяє моделювати і багато разів демонструвати роботу електронної системи керування двигуном в штатному режимі і при виникненні відмов. Недоліками тренажера-найближчого аналога при використовуванні його в учбово-тренувальному процесі є: - відсутність на схемі взаємозв'язків елементів блоку візуалізації їх якісних параметрів в штатному режимі експлуатації і при виникненні відмов; - відсутність панелі керування тренажером для введення різних режимів експлуатації, у тому числі при виникненні відмов. Вказані недоліки знижують дидактичні якості тренажера і, відповідно, ефективність учбово-тренувального процесу. В основу корисної моделі поставлена задача створення спеціалізованого тренажера функціональної системи транспортного засобу, зокрема, системи керування вертольотом, в якому за рахунок введення нових конструктивних елементів, іншого виконання елементів конструкції тренажера і іншого взаємозв'язку їх між собою забезпечується суттєве підвищення дидактичних якостей тренажера і, відповідно, зниження тривалості підготовки льотного і інженерно-технічного складу при більшій об'єктивності її проведення, що підвищує ефективність і якість учбово-тренувального процесу в цілому. Поставлена задача вирішується тим, що в спеціалізованому тренажері функціональної системи транспортного засобу, зокрема системи керування вертольотом, виконаним у вигляді стенду, на якому розташовані блок візуалізації, що включає елементи функціональної системи і схему взаємозв'язків між ними, панель керування функціональною системою і блок живлення, при цьому блок візуалізації, панель керування функціональною системою і блок живлення з'єднані між собою, а схема взаємозв'язків між елементами функціональної системи виконана за допомогою імітаторів, що відображають зв'язки між ними при експлуатації її в штатному режимі і при виникненні відмов згідно корисної моделі на стенді додатково розміщені панель керування тренажером, блок демонстраційних механізмів і процесорний блок, панель керування тренажером виконана у вигляді набору перемикачів для його вмикання і вимикання і введення режимів відмов системи керування вертольотом, блок демонстраційних механізмів виконаний у ви гляді елементів системи керування вертольотом, блок візуалізації включає елементи системи керування вертольотом, панель керування функціональною системою виконана у вигляді фрагментів відповідних штатних панелей керування і контролю системи керування вертольотом і/або у вигляді набору складових їх елементів, при цьому панель керування функціональною системою, панель керування тренажером, блок демонстраційних механізмів і блок візуалізації розміщені на лицьовій стороні стенду, панель керування тренажером зв'язана з процесорним блоком, який, у свою чергу, взаємозв'язаний з панеллю керування функціональною системою, а блок живлення з'єднаний із зазначеними панеллю керування функціональною системою, панеллю керування тренажером і процесорним блоком. Для забезпечення наочності і принципів роботи тренажера елементи блоку демонстраційних механізмів системи керування вертольотом виконані у вигляді шта тних механізмів і/або їх деталей і /або їх розрізів і/або їх макетів і/або їх зображень, наприклад, у вигляді фотопланшетів і/або схем і/або графічних малюнків. Для підвищення адекватності пристрою і логіки роботи тренажера реальним умовам експлуатації блок візуалізації включає, щонайменше, графічну схему системи керування вертольотом, виконану у вигляді графічного об'ємного малюнка вертольота з відображенням в масштабі розташованих на ньому органів керування в кабіні пілотів, двигунів, несучого і рульового гвинтів із зв'язками між ними за допомогою тяг проводки керування і здвоєної тросової проводки, при цьому схема зв'язків між ними виконана з можливістю відображення напряму і їх якісних параметрів за допомогою, наприклад, контрастного колірного рішення і/або світло діодів і/або інших сві тловипромінювальних елементів і/або табло. Для підвищення адекватності пристрою і логіки роботи тренажера реальним умовам експлуатації блок демонстраційних механізмів включає, щонайменше, макет блоку роликів, макет напрямних текстолітових колодок, фотопланшет важелів зупинки двигунів, макет електромагнітного гальма з пружинним механізмом завантаження, макети чотирьох тяги проводки керування, макет сектора шляхового керування з штоком гідропідсилювача, макети трьох качалок керування, макет напрямного кронштейна з роликами, макет електромеханізму перенастроювання обертів двигуна, макет ланцюга з частиною здвоєної тросової проводки, фотопланшет втулково-роликового ланцюга із зірочкою хвостового редуктора, графічні малюнки ручки керування гальмом несучого гвинта, фотопланшет ручки подовжньо-поперечного керування, графічний малюнок гашетки з мікровимикачем, фотопланшет лівої ручки керування Крок-Газ з важелями роздільного керування двигунами, фотопланшет педалі шляхового керування, графічний малюнок механізму рухомого упору з електромеханізмом, виконаний в розрізі, графічний малюнок механізму перенастроювання частоти обертання двигунів з електромеханізмом, виконаний в розрізі, і графічний малюнок гідроупора подовжнього керування, виконаний в розрізі, при цьому зазначений фотопланшет лівої ручки керування Крок-Газ з важелями роздільного керування двигунами включає макет перемикача перенастроювання обертів несучого гвинта, який виконаний активним і з'єднаний з процесорним блоком і блоком живлення. Для підвищення адекватності пристрою і логіки роботи тренажера реальним умовам експлуатації панель керування функціональною системою включає, щонайменше, фрагмент панелі керування з вимикачем системи рухомого упору керування на лівому щитку електропульта, фрагмент панелі блоку керування системи рухомого упору керування на центральному пульті з кнопкою-табло відключення, поворотною ручкою контролю, натискним перемикачем і індикатором положення нуля, фрагменти панелі керування з циферблатним покажчиком кроку гвинта і з циферблатним покажчиком обертів несучого гвинта і фрагменти правої панелі автоматів захисту мережі системи керування з перемикачами керування оборотами двигуна, фрикціона і електромуфт і системи рухомого упору керування. Для підвищення адекватності пристрою і логіки роботи тренажера реальним умовам експлуатації панель керування тренажером включає, щонайменше, вимикач тренажера і вимикач імітації відмови системи рухомого упору керування. Процесорний блок може включати цифровий модельний процесор з вбудованими пристроями для зберігання програми і оперативної пам'яті, виконаний з можливістю реалізації математичних моделей експлуатації системи керування вертольотом, у тому числі в штатному режимі і при виникненні відмов. Сукупність загальних і відрізнювальних суттєви х ознак корисної моделі, що заявляється, дозволяє реалізувати в спеціалізованому тренажері системи керування вертольотом автоматизовану учбово-тренувальну систему з високими дидактичними якостями і контролем одержаних знань, що дозволяє суттєво підвищити ефективність учбового процесу. При цьому забезпечується наочність відображення пристрою, керування і принципів роботи системи керування, що вивчається, як в штатному режимі, так і у разі виникнення відмов, що також сприяє ефективності навчання і засвоєнню одержаних знань. Можливість відображення на стендітренажері напряму і якісних параметрів взаємозв'язків дозволяє поліпшити візуальне сприйняття і запам'ятовування матеріалу, що вивчається, і, зрештою, підвищує якість і ефективність навчання. Сутність корисної моделі пояснюється фігурами креслень на прикладі спеціалізованого тренажера системи керування вертольотом МІ-171, де на Фіг.1 представлена принципова блок-схема; на Фіг.2 - схема розташування блоків тренажера на лицьовій стороні стенду; на Фіг.3 - схема панелі керування тренажером; на Фіг.4 - схема фрагмента панелі керування тренажером з вимикачем системи рухомого упору керування на лівому щитк у електропульта; на Фіг.5 - схема фрагмента панелі блоку керування системи рухомого упору керування на центральному пульті; на Фіг.6 - схема фрагмента панелі керування з циферблатним покажчиком кроку гвинта; на Фіг.7 - схема фрагмента панелі керування з циферблатним покажчиком обертів несучого гвинта; на Фіг.8 - схема фрагмента правої панелі автоматів захисту мережі системи керування аварійної сигналізації. Спеціалізований тренажер системи керування вертольотом складається із стенду 1, на лицьовій стороні якого розміщені блок демонстраційних механізмів 2, блок візуалізації 3, панель керування тренажером 4 і панель керування функціональною системою 5, а також з процесорного блоку 6 і блоку живлення 7. Стенд 1 виконаний з плоского щільного матеріалу, наприклад, з двосторонньо ламінованого листа деревностружкової плити товщиною від 16 до 20мм, розміром не більше 2,7х1,5м, закріпленого на металевих стійках, наприклад, з квадратного профілю 40х25мм, в нижній частині яких встановлені погумовані колеса (не показані). При цьому блок демонстраційних механізмів 2 розташований в лівій і нижній правій частинах стенду 1, блок візуалізації 3 - у верхній правій частині стенду 1, панелі керування тренажером 4 і керування функціональною системою 5 - в нижній частині стенду 1. Блок демонстраційних механізмів 2 призначений для вивчення конструкції агрегатів і механізмів системи керування і виконаний у вигляді окремих елементів, що входять до складу даної системи. Блок демонстраційних механізмів 2 (Фіг.3) включає макет 8 блоку роликів, макет 9 напрямних текстолітових колодок, фотопланшет 10 важелів зупинки двигунів, макет 11 електромагнітного гальма ЕМТ-2 з пружинним механізмом завантаження, макети 12 чотирьох тяги проводки керування , макет 13 сектора шляхового керування з штоком гідропідсилювача РА-60Б, макети 14 три качалок керування, макет 15 напрямного кронштейна з роликами, макет 16 електромеханізму МП-100М перенастроювання обертів двигуна, макет 17 ланцюга з частиною здвоєної тросової проводки, фотопланшет 18 втулково-роликового ланцюга із зірочкою хвостового редуктора, графічний малюнок 19 ручки керування гальмом несучого гвинта, фото планшет 20 ручки подовжньопоперечного керування, графічний малюнок 21 гашетки з мікровимикачем, фотопланшет 22 лівої ручки керування Крок-Газ з важелями роздільного керування двигунами, фотопланшет 23 педалі путнього керування, графічний малюнок 24 механізми рухомого упору з електромеханізмом МП-100М, виконаний в розрізі, графічний малюнок 25 механізму перенастроювання частоти обертання двигунів з електромеханізмом МП-100М, виконаний в розрізі, і графічний малюнок 26 гідроупора подовжнього керування, виконаний в розрізі. Зовнішній вигляд і пристрій вищезазначених макетів, фотопланшетів і графічних малюнків елементів повністю відповідає реальним елементам системи керування вертольотом. Фотопланшет 22 на ручці керування Крок-Газ включає макет перемикача перенастроювання обертів несучого гвинта (не позначений), який виконаний активним і з'єднаний з процесорним блоком б і блоком живлення 7 (на Фіг.1 показано пунктирними лініями). Блок візуалізації 3 (Фіг.3) призначений для вивчення пристрою системи керування і включає графічну схему даної системи, виконану у вигляді графічного об'ємного малюнка вертольота з відображенням в масштабі розташованих на ньому органів керування в кабіні пілотів, двигунів, несучого і р ульового гвинтів із зв'язками між ними за допомогою тяги проводки керування і здвоєної тросової проводки (не позначені). Графічна схема блоку візуалізації 3 відповідає реальному розміщенню і зв'язкам елементів системи керування на вертольоті. Для зручності сприйняття вищезазначені зв'язки представлені в контрастному колірному рішенні. Зв'язки можуть бути також виконані з можливістю світлового відображення їх напряму і якісних параметрів, зокрема, за допомогою світлодіодів і/або інших світловипромінювальних елементів. В цьому випадку імітатори зв'язків між елементами системи керування на блоці візуалізації 3 підключені до блоку живлення 7 (пунктирний зв'язок на Фіг.1). Панель керування тренажером 4 (Фіг.3) призначена для вмикання і вимикання тренажера і введення режимів відмов і включає вимикач 27 тренажера і вимикач 28 імітації відмови системи рухомого упору керування СПУУ-52. Панель керування функціональною системою 5 виконана у вигляді фрагментів відповідних штатни х панелей вертольота і включає елементи керування і контролю з їх найменуваннями, у тому числі: - фрагмент 29 панелі керування (Фіг.2, 4) з вимикачем системи рухомого упору керування СПУУ-52 на лівому щитку електропульта (не позначений); - фрагмент 30 панелі блоку керування (Фіг.2, 5) БУ-32 системи рухомого упору керування СПУУ-52 на центральному пульті з кнопкою-табло 31 вимикання, поворотною ручкою контролю 32, натискним перемикачем 33 і індикатором 34 положення нуля; - фрагмент 35 панелі керування (Фіг.2, 6) з циферблатним покажчиком кроку гвинта (не позначений); - фрагмент 36 панелі керування (Фіг.2, 7) з циферблатним покажчиком обертів несучого гвинта (не позначений); - фрагменти 37 правої панелі автоматів захисту мережі системи керування (Фіг.2, 8) з перемикачами 38 керування оборотами двигуна, фрикціона 39 і електромуфт 40, системи 41 рухомого упору керування СПУУ-52 . Процесорний блок 6 (Фіг.1) призначений для реалізації математичних моделей експлуатації системи керування, які задаються в процесі занять на панелі керування тренажером 4 і на панелі керування функціональною системою 5. Процесорний блок 6 включає цифровий модельний процесор 42, який на підставі закладеної в нього програми реалізує математичні моделі експлуатації системи керування вертольотом. Процесорний блок 6 в реальному масштабі часу здійснює наступні функції: - приймає інформацію, що поступає з панелі керування тренажером 4; - відповідно до програми проводить розрахунок поточного стану модельованої системи керування; - здійснює управляючі дії на елементи відображення інформації на відповідних фрагментах панелі керування функціональної системи 5. Блок живлення 7 забезпечує електроенергією системи тренажера від мережі 220В, 50Гц і перетворення її до робочих напруг електричних схем по виду і величині електроенергії (постійна або змінна напруга, амплітуда і частота стр уму) в межах, що доп ускаються, по відхиленнях, а також захист тренажера від перенапруження і інших аварійних чинників. Зв'язки блоку живлення 7 з іншими блоками тренажера забезпечуються відповідною електричною схемою. Моделююче середовище процесорного блоку 6 і взаємозв'язки його з панеллю керування тренажером 4 і панеллю керування функціональною системою 5 забезпечують відпрацювання дій екіпажа згідно керівництву по льотній експлуатації при імітації роботи: - електромагнітного гальма ЕМТ-2М при натисненні на кнопку "Триммер"; - перемикача перенастроювання обертів несучого гвинта при установці його в положення "більше-менше"; - системи рухомого упору керування СПУУ-52. Спеціалізований тренажер системи керування дозволяє виконувати наступні учбово-тренувальні задачі при підготовці льотного і інженерно-технічного складу, що експлуатує вертольоти: - первинне льотне навчання; - перенавчання з іншого типу вертольота; - відновлення кваліфікації після перерви. Описана в даному прикладі і представлена на кресленнях конструкція спеціалізованого тренажера функціональної системи транспортного засобу, зокрема, системи керування вертольотом, не є єдино можливою для досягнення вищезазначеного технічного результату і не виключає інших варіантів її виконання, які включають сукупність конструктивних ознак, включених у формулу. Наприклад, на лицьовій стороні стенду може бути інше взаємне розташування блоку демонстраційних механізмів, блоку візуалізації і панелі керування тренажером. Наприклад, вказані блоки можуть бути виконані з іншим розташуванням або складом елементів функціональної системи, засобів її керування і контролю, а також керування тренажером. Наприклад, взаємозв'язки між елементами системи керування можуть бути виконані з можливістю світлового відображення їх напряму і якісних параметрів, зокрема, за допомогою світлодіодів і/або інших світловипромінювальних елементів. Наприклад, процесорний блок може включати додатковий модуль для тестування (оцінки) правильності дій навчаємих, у тому числі в режимі самооцінки. Учбово-тренувальні вправи на спеціалізованому тренажері системи керування вертольотів здійснюють таким чином. У процесі виконання вправи навчаємий на панелі керування тренажером 4 і на панелі керування 5 в певній послідовності виконує передбачені керівництвом по експлуатації дії, вмикаючи або вимикаючи штатні вимикачі, перемикачі і кнопки. З вказаних панелей 4 і 5 управляюча інформація поступає в процесорний блок 7, який через цифровий модельний процесор 42 реалізує математичні моделі режиму, що задається, на елементах контролю панелі керування 5. Робота системи контролюється по схемі взаємозв'язків між її елементами на блоці візуалізації 3, зовнішньому вигляду елементів блоку демонстраційних механізмів 2, представлених у вигляді макетів і схем, за показниками приладів і індикаторів панелі керування 5. Багато разів повторюючи учбово-тренувальні вправи, навчаємі прагнуть виконати їх без помилок. Після закінчення кожної теми може бути виконаний контроль одержаних навиків і знань в режимах самоконтролю або залікового тестування з урахуванням правильності і тривалості виконання контрольних завдань по критеріях, встановленим відповідним керівництвом по експлуатації. Включення тренажера проводиться з панелі керування тренажером 4 переводом вимикача 27 у включене положення. Приклад 1. Вправа по перевірці системи керування після запуску двигуна і у польоті. При виконанні вправи використовуються наступні елементи панелі керування 5 функціональною системою: - фрагмент 37 правої панелі автоматів захисту мережі системи керування (Фіг.8); - фрагмент 30 панелі блоку керування БУ-32 системи рухомого упору керування СППУ-52 на центральному пульті (Фіг.5) і фрагмент 29 панелі керування з вимикачем системи рухомого упору керування СПУУ-52 на лівому щитку електропульта (Фіг.4). Перевірка системи керування після запуску двигуна здійснюється в наступній послідовності: - на фрагменті 37 правої панелі автоматів захисту мережі системи керування вмикають перемикач системи 41 рухомого упору керування СППУ-52, після чого на фрагменті 30 панелі блоку керування БУ-32 системи рухомого упору керування СППУ-52 на центральному пульті спалахує кнопка-табло 31 вимикання, що свідчить про відсутність живлення, а планка індикатора 34 положення нуля переміщається в крайнє ліве положення, відповідне втягнутому стану електромеханізму МП-100М; - вмикають вимикач (не позначений) системи рухомого упору керування СППУ-52 на фрагменті 29 панелі керування на лівому щитку електропульта, після чого кнопка-табло 31 вимикання гасне; - натискують кнопку-табло 31 відключення, табло спалахує, і, не відпускаючи її, натискний перемикач 33 встановлюють в положення температури t, при цьому планка індикатора 34 положення нуля переміщається на праву проміжну відмітку, потім натискний перемикач 33 встановлюють в положення тиску р і планка індикатора 34 положення нуля переміщається на ліву проміжну відмітку; - відпускають кнопку-табло 31 відключення і натискний перемикач 33, після чого кнопка-табло 31 гасне, планка індикатора 34 положення нуля повертається в середнє положення; - натискують кнопку-табло 31 відключення і, не відпускаючи її, поворотною ручкою контролю 32 планку індикатора 34 положення нуля встановлюють в крайнє праве положення; - вимикають вимикач (не позначений) системи рухомого упору керування СППУ-52 на фрагменті 29 панелі керування на лівому щи тку електропульта і відпускають кнопку-табло 31 вимикання, планка індикатора 34 положення нуля переміщається в крайнє ліве положення, при цьому кнопка-табло 31 вимикання продовжує горіти; Натискують кнопку-табло 31 вимикання, вмикають вимикач (не позначений) системи рухомого упору керування СППУ-52 на фрагменті 29 панелі керування і, не відпускаючи кнопку-табло 31 вимикання, поворотною ручкою контролю 32 планку індикатора 34 положення нуля встановлюють в середнє положення. При перевірці системи керування у польоті планка індикатора 34 положення нуля переміщається вліво при збільшенні температури або зменшенні тиску зовнішнього повітря. Приклад 2. Вправа по вивченню і відпрацюванню дій при відмові системи рухомого упору СПУУ-52. Вправа вводиться з панелі керування тренажером 4 (Фіг.3) включеним вимикачі 28. Подальші дії при імітації відмови: - на фрагменті 29 панелі керування лівому щитку електропульта (Фіг.4) вимикач (не позначений) системи рухомого упору керування СПУУ-52 встановлюють у вимкнене положення, після чого не необхідно переконатися, що на фрагменті 30 блоку керування БУ планка індикатора 34 положення нуля перемістилася в крайнє ліве положення; - посадку вертольота проводять в звичному порядку, не допускаючи різких і на велику величину відхилень педалей; - якщо після установки вимикача СПУУ-52 у вимкнене положення планка індикатора 34 положення нуля не перемістилася в крайнє ліве положення, то посадку провести з коротким пробігом; - за відсутності можливості виконати посадку з коротким пробігом, необхідно виробити паливо і провести посадку проти вітру по вертольотному. Аналогічним чином проводиться відпрацювання навиків для інших режимів експлуатації системи керування і, відповідно до учбово-тренувального плану, навчаємі переходять до освоєння інших функціональних систем вертольота. Пропонована конструкція тренажера забезпечує підвищення його дидактичних якостей і оптимальне поєднання інформаційно-візуальних і сенсомоторних можливостей тренажера із задачами учбово-тренувального процесу при вивченні системи керування вертольотом. Візуальне відображення пристрою і зв'язків між елементами функціональної системи, що вивчається, обмеження інформаційного середовища навчаємого елементами керування і контролю конкретною функціональною системою і використовування в процесорному модулі порівняно простих апаратних засобів в сукупності істотно підвищують ефективність учбово-тренувального процесу при одночасному зниженні вартості тренажера і вартості проведення учбового процесу. В порівнянні з аналогічними тренажерами такого типу тривалість учбово-тренувальної підготовки по вивченню і відпрацювання навиків по вивченню системи керування вертольотом знижується в середньому на 15-20% при одночасному підвищенні її якості.
ДивитисяДодаткова інформація
Назва патенту англійськоюSpecial simulator of functional system of mean of transportation, in particular of system of helicopter control
Автори англійськоюBarvinok Dmytro Volodymyrovych, Zіnсhеnко Volodymyr Pavlovych, Koval Dmytro Оrеstоvусh, Matiukha Volodymyr Mykhailovych, Motsar Anatolii Ivanovych, Motsar Vаlеrіі Anatoliiovych, Motsar Petro Ivanovych, Motsar Yurii Anatoliiovych, Sеnеnко Ruslan Hryhorovych, Tupikov Kostiantyn Serhiiovych
Назва патенту російськоюСпециальный тренажер функциональной системы транспортного средства, в частности системы управления вертолетом
Автори російськоюБарвинок Дмитрий Владимирович, Зинченко Владимир Павлович, Коваль Дмитрий Орестович, Матюха Владимир Михайлович, Моцарь Анатолий Иванович, Моцарь Валерий Анатольевич, Моцар Петр Иванович, Моцарь Юрий Анатольевич, Сененко Руслан Григорьевич, Тупиков Константин Сергеевич
МПК / Мітки
МПК: G09B 9/02
Мітки: тренажер, засобу, вертольотом, функціонально, зокрема, системі, транспортного, керування, спеціалізований
Код посилання
<a href="https://ua.patents.su/6-24034-specializovanijj-trenazher-funkcionalno-sistemi-transportnogo-zasobu-zokrema-sistemi-keruvannya-vertolotom.html" target="_blank" rel="follow" title="База патентів України">Спеціалізований тренажер функціональної системи транспортного засобу, зокрема системи керування вертольотом</a>
Спеціалізований тренажер функціональної системи транспортного засобу, зокрема системи трансмісії вертольота
Номер патенту: 23272
Опубліковано: 10.05.2007
Автори: Моцар Петро Іванович, Моцарь Анатолій Іванович, Зінченко Володимир Павлович, Сененко Руслан Григорович, Тупіков Костянтин Сергійович, Моцарь Юрій Анатолійович, Барвінок Дмитро Володимирович, Моцарь Валерій Анатолійович, Матюха Володимир Михайлович, Коваль Дмитро Орестович
МПК: G09B 9/02
Мітки: вертольота, засобу, функціонально, спеціалізований, трансмісії, транспортного, зокрема, системі, тренажер
Формула / Реферат:
1. Спеціалізований тренажер функціональної системи транспортного засобу, зокрема системи трансмісії вертольота, виконаний у вигляді стенда, на якому розташовані блок візуалізації, що включає елементи функціональної системи і схему взаємозв'язків між ними, панель керування функціональною системою і блок живлення, при цьому блок візуалізації, панель керування функціональною системою і блок живлення з'єднані між собою, а схема взаємозв'язків між...
Спеціалізований тренажер функціональної системи транспортного засобу, зокрема системи обігріву і вентиляції вертольота
Номер патенту: 21755
Опубліковано: 15.03.2007
Автори: Коваль Дмитро Орестович, Моцарь Валерій Анатолійович, Тупіков Костянтин Сергійович, Моцар Петро Іванович, Барвінок Дмитро Володимирович, Моцарь Юрій Анатолійович, Зінченко Володимир Павлович, Сененко Руслан Григорович, Моцарь Анатолій Іванович, Матюха Володимир Михайлович
МПК: G09B 9/02
Мітки: обігріву, спеціалізований, вертольота, тренажер, функціонально, вентиляції, засобу, системі, зокрема, транспортного
Формула / Реферат:
1. Спеціалізований тренажер функціональної системи транспортного засобу, зокрема системи обігріву і вентиляції вертольота, що виконаний у вигляді стенда, на якому розташовані блок візуалізації, що містить елементи функціональної системи і схему взаємозв'язків між ними, панель керування функціональною системою і блок живлення, при цьому блок візуалізації, панель керування функціональною системою і блок живлення з'єднані між собою, а схема...
Спеціалізований тренажер функціональної системи транспортного засобу, зокрема протипожежної системи вертольота
Номер патенту: 21756
Опубліковано: 15.03.2007
Автори: Тупіков Костянтин Сергійович, Барвінок Дмитро Володимирович, Коваль Дмитро Орестович, Моцарь Юрій Анатолійович, Матюха Володимир Михайлович, Моцар Петро Іванович, Моцарь Валерій Анатолійович, Зінченко Володимир Павлович, Сененко Руслан Григорович, Моцарь Анатолій Іванович
МПК: G09B 9/00
Мітки: тренажер, засобу, функціонально, протипожежної, спеціалізований, транспортного, зокрема, системі, вертольота
Формула / Реферат:
1. Спеціалізований тренажер функціональної системи транспортного засобу, зокрема протипожежної системи вертольота, виконаний у вигляді стенда, на якому розташовані блок візуалізації, що включає схему взаємозв'язків між елементами функціональної системи, панель керування функціональною системою і блок живлення, при цьому панель керування функціональною системою і блок живлення з'єднані між собою, а схема взаємозв'язків між елементами...
Спеціалізований тренажер функціональної системи транспортного засобу, зокрема, гідравлічної системи вертольота
Номер патенту: 21134
Опубліковано: 15.02.2007
Автори: Коваль Дмитро Орестович, Моцар Петро Іванович, Моцарь Валерій Анатолійович, Моцарь Анатолій Іванович, Сененко Руслан Григорович, Моцарь Юрій Анатолійович, Барвінок Дмитро Володимирович, Тупіков Костянтин Сергійович, Зінченко Володимир Павлович, Матюха Володимир Михайлович
МПК: G09B 9/02
Мітки: тренажер, гідравлічної, системі, функціонально, зокрема, вертольота, транспортного, засобу, спеціалізований
Формула / Реферат:
1. Спеціалізований тренажер функціональної системи транспортного засобу, зокрема, гідравлічної системи вертольота, що виконаний у вигляді стенда, на якому розміщені блок візуалізації, що включає елементи функціональної системи і схему взаємозв'язків між ними, панель керування функціональною системою і блок живлення, при цьому блок візуалізації, панель керування функціональною системою і блок живлення з'єднані між собою, а схема взаємозв'язків...
Спеціалізований тренажер функціональної системи транспортного засобу, зокрема паливної системи вертольота
Номер патенту: 21120
Опубліковано: 15.02.2007
Автори: Матюха Володимир Михайлович, Моцарь Юрій Анатолійович, Зінченко Володимир Павлович, Моцар Петро Іванович, Барвінок Дмитро Володимирович, Моцарь Анатолій Іванович, Коваль Дмитро Орестович, Тупіков Костянтин Сергійович, Сененко Руслан Григорович, Моцарь Валерій Анатолійович
МПК: G09B 9/02
Мітки: зокрема, тренажер, засобу, спеціалізований, вертольота, функціонально, системі, паливної, транспортного
Формула / Реферат:
1. Спеціалізований тренажер функціональної системи транспортного засобу, зокрема паливної системи вертольота, виконаний у вигляді стенда, на якому розміщені блок візуалізації, що включає елементи функціональної системи і схему взаємозв'язків між ними, панель керування функціональною системою і блок живлення, при цьому блок візуалізації, панель керування функціональною системою і блок живлення з'єднані між собою, а схема взаємозв'язків між...
Попередній патент: Котлоагрегат
Наступний патент: Спосіб протекції когнітивних функцій у хворих похилого віку
Випадковий патент: Гамма-камера однофотонного томографа