Промисловий робот
Формула / Реферат
Промышленный робот, содержащий руку, состоящую из платформ треугольной формы, каждая из которых связана с соседней платформой посредством трех приводов линейного перемещения, шарнирно установленных на этих платформах, а также расположенный на крайней платформе руки схват, в корпусе которого установлен привод перемещения его губок, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны, обеспечения возможности перехвата объекта манипулирования и обеспечения работоспособности в широком диапазоне температур, работы в газовой и водной среде высокого давления, вакуума, а также с целью снижения потребления энергии за счет повышения КПД, он снабжен двумя дополнительными руками со схватами, приводами поворота схватов, каждый из которых включает двигатель и червячную передачу, связанную с валом двигателя и с корпусом схвата, двумя дополнительными платформами, тремя дополнительными приводами линейного перемещения, установленными между этими платформами и шарнирно с ними связанными, а также приводом продольного перемещения одной из дополнительных платформ, включающим два винта, три двигателя, три корпуса и установленные в каждом корпусе червячную передачу и гайку, связанную через эту передачу с валом соответствующего двигателя, причем две гайки расположены на одном из винтов, третья на другом, а корпусе жестко связаны с этой дополнительной платформой, при этом на другой дополнительной платформе установлены основная и дополнительные руки, а каждый из приводов линейного перемещения дополнительной платформы и платформ рук состоит из двигателя, корпуса, шарнирно связанного с одной из соседних платформ, и установленных в корпусе винтовой и червячной передач, причем червяк этого привода связан с валом двигателя, а червячное колесо жестко связано с гайкой винтовой передачи этого привода, винт которого шарнирно связан с другой платформой, при этом привод губок схвата состоит из установленного на корпусе схвата двигателя, червячной и винтовой передач, причем гайка винтовой передачи через червячную передачу связана с валом двигателя, а винт шарнирно связан с губками схвата, кроме того, в каждой передаче всех приводов винт и червяк выполнены из магнитопроводного материала, а резьбовые выступы гайки и венец червячного колеса червячной передачи являются полюсами магнитов и расположены с зазором относительно резьбовых выступов соответствующего винта и зубцов соответствующего червяка.
Текст
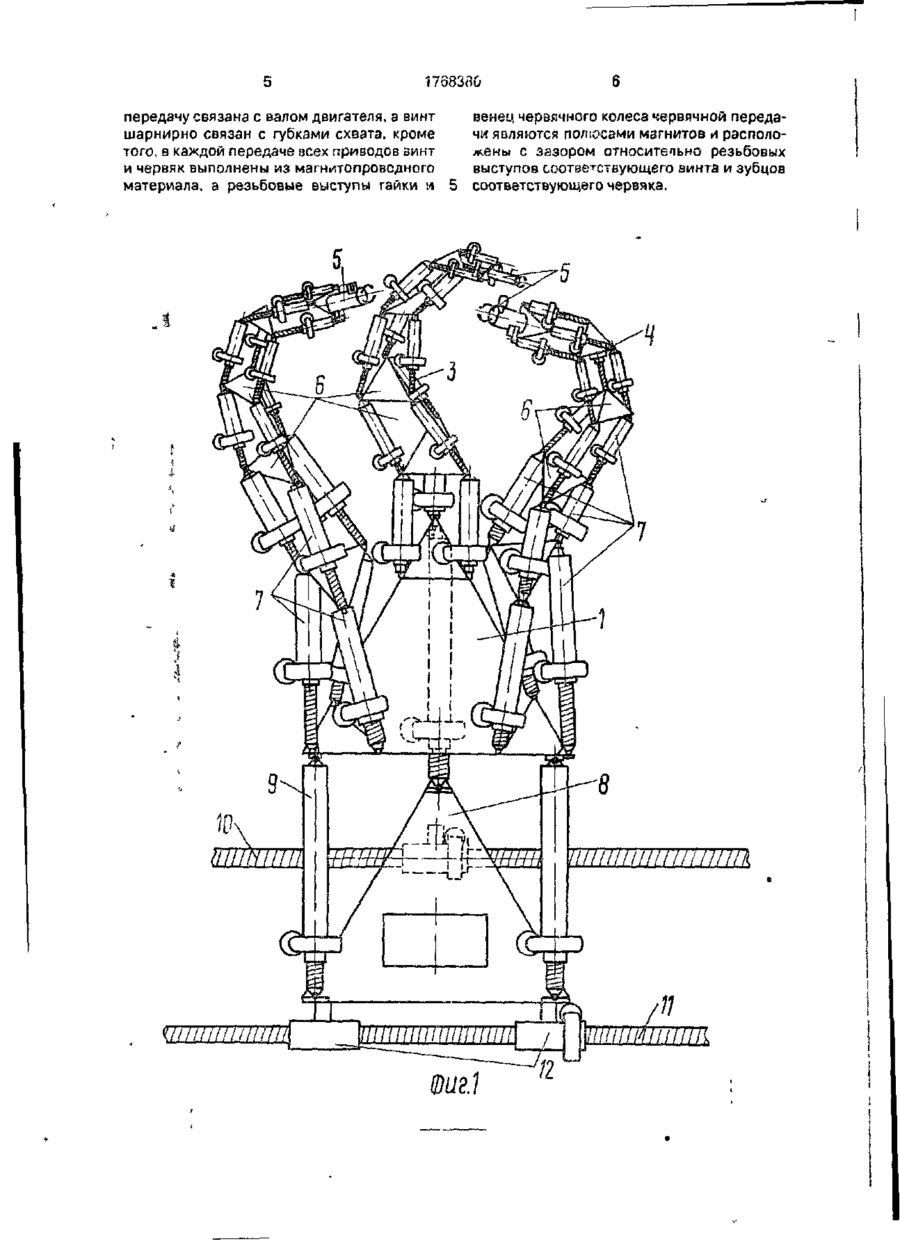
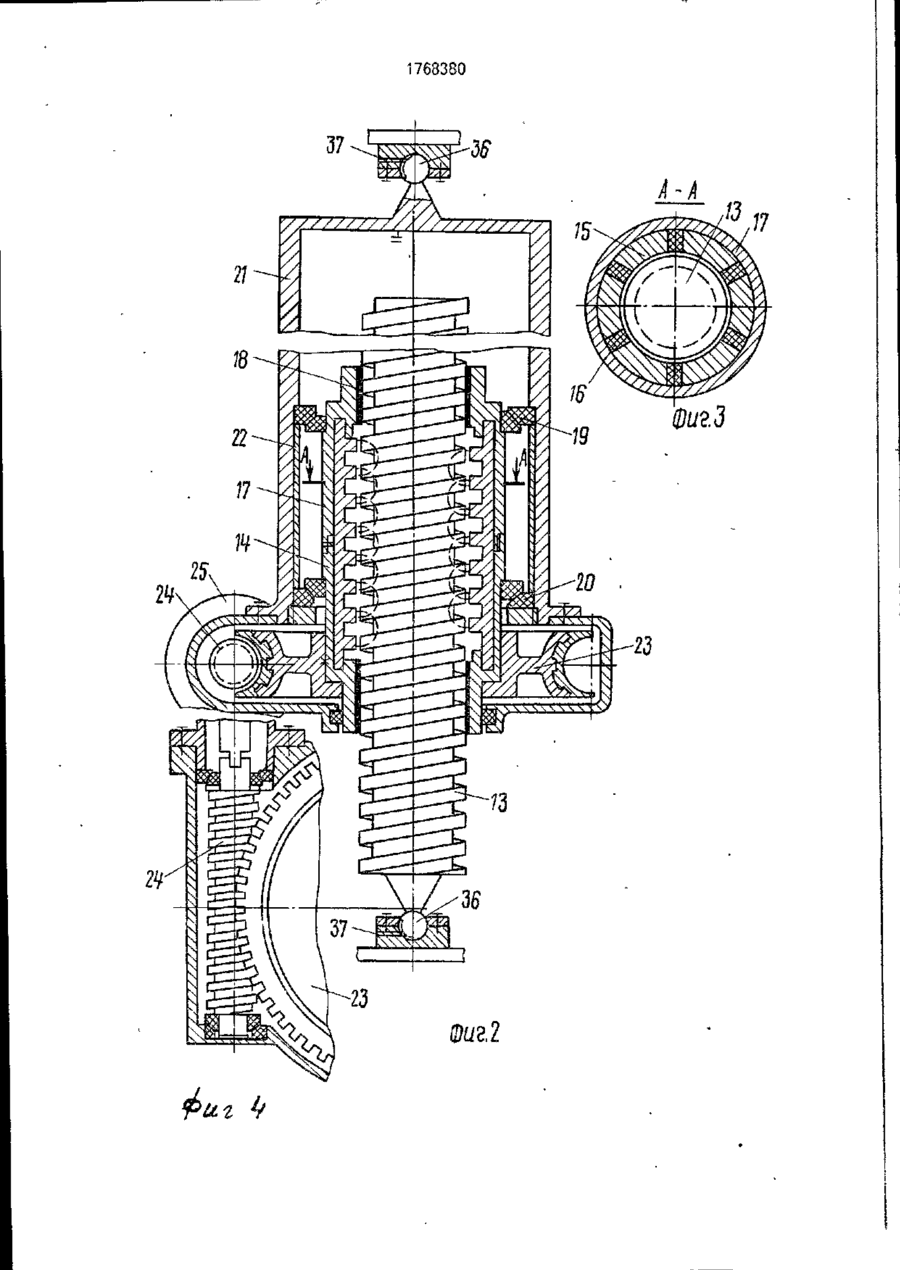
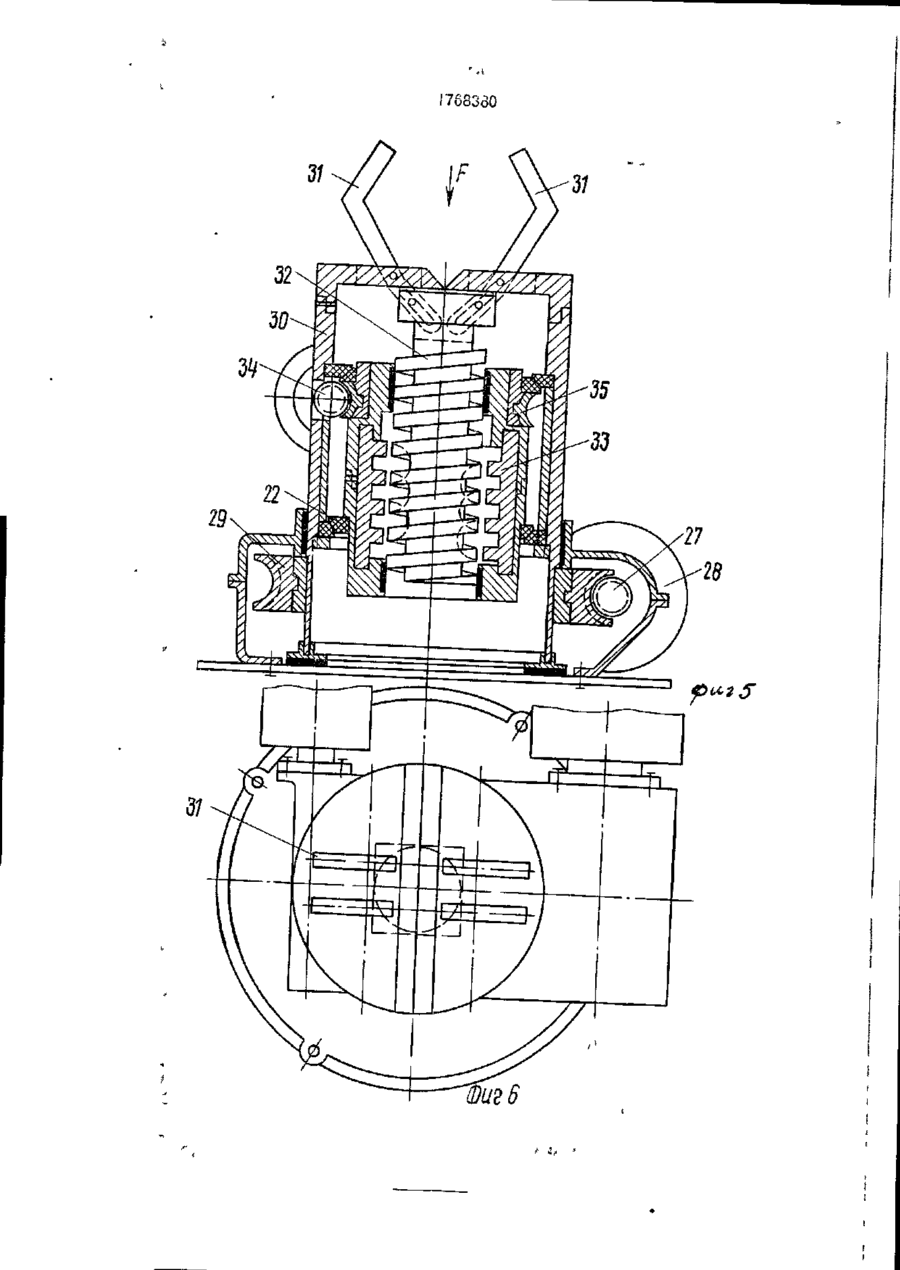
Изобретение относится к машиностроению, в частности к роботам и манипуляторам, используемым для автоматизации различных процессов. Целью изобретения является расширение технологических возможностей за счет увеличения рабочей зоны, обеспечения возможности перехвата объекта манипулирования и обеспечения работоспособности в широком диапазоне температур, работы в газовой и водной сре де высокого давления, вакууме, з также снижение потребления энергии за счет повышения КПД. Перемещение рук, установленных на дополнительной платформе, возможно одновременно при продольном перемещении второй дополнительной платформы за счет вращения гаек, установленных в корпусах и расположенных на винтах или перемещении дополнительной платформы посредством приводов линейного перемещения. Относительное перемещение рук возможно при работе приводов линейного перемещения, связывающих соседние платформы этих рук. Все передачи приводов рук и их схватов осуществляют передачу усилия посредством магнитного поля. 6 ил. Изобретение относится к машиностроению, в частности к роботам и манипуляторам, используемым для автоматизации различных процессов. Целью изобретения является расширение технологических возможностей зэ счет увеличения рабочей зоны, обеспечения возможности перехвата объекта манипулирования и обеспечений работоспособности в широком диапазоне температур, а также снижение потребления энергии за счет повышения к.п.д. На фиг. 1 изображен общий вид промышленного робота; на фиг. 2 - привод линейного перемещения, разрез; на фиг, 3 разрез А-А нз фиг. 2; на фиг. 4 - разрез ВСДЕ на фиг. 2; на фиг. 5 - привод схвата, разрез; на фиг. 6 - вид по стрелке F на фиг. 5. Промышленный робот содержит установленные на дополнительной платформе 1 основную 2 и две дополнительных руки 3 и 4 со схватами 5, каждая из которых состоит из платформы 6, связанных между собой посредством приводов линейного перемещения 7. Другая дополнительная платформа 8 связана с платформой 1 через дополнительные приводы линейного перемещения 9 и снабжена приводом ее продольного перемещения, включающим два винта 10 и 11, на которых в корпусах 12 установлены гайки, связанные через червячную передачу с валом соответствующего двигателя, закрепленного на корпусе. В передачах этого привода как и остальных приводов передача усилия осуществляется за счет магнитного взаимодействия между червяком и червячным колесом и между гайкой с» о 1768380 и винтом. Конструкция такой передачи показана на примере привода линейного перемещения 7 или Э (фиг. 2-4). Винт 13 выполнен из магнитопроводного материала и имеет прямоугольный профиль резьбы и 5 взаимодействует своими выступающими частями с выступающими частями резьбы гайки 14, которые являются полюсами магнитов, например, магнитных вкладышей 15, укрепленных в гайке через прокладки 16. 10 Магнитные вкладыши 15 изготовлены сегментами и установлены с образованием прямоугольной резьбы на внутренней поверхности гайки. На обойме 17 гайки, выполненной из немагнитного материала, 15 установлен подшипник 18 и половины радиально-упорных подшипников 19 и 20, другие половины которых установлены в корпусе 21 через распорную втулку 22. На обойме 17 закреплена также ступица чер- 20 вячного колеса 23, венец которой также образован полюсами магнитов и охватывает червяк 24 на 180°. Червях 24 выполнен из магнитопооводного материала и связан с двигателем 25. На корпусе 21 установлен 25 концевой выключатель 26. нии соответствующих гаек, установленных 8 корпусах этих приводов. Аналогично при включении соответствующих двигателей осуществляется поворот схватов 5 и перемещение их губок 31. Формула изобретения Промышленный робот, содержащий руку, состоящую из платформ треугольной формы, каждая из которых связана с соседней платформой посредством трех приводов линейного перемещения, шарнирно установленных на зтих платформах, а также расположенный на крайней платформе руки схват, в корпусе которого установлен привод перемещения его губок, о т л и ч а ю щ и й с я тем, что, с целью расширения технологических возможностей за счет увеличений рабочей зоны, обеспечения возможности перехвата объекта манипулирования и обеспечения работоспособности в широком диапазоне температур, работы в газовой и водной среде высокого давления, вакуума, а также с целью снижения потребления энергии за счет повышения КПД, он снабжен двумя дополнительными ругзми со схватами, привоПривод поворота схвата 5 содержит дами поворота схватов, каждый из которых червячную передачу, червяк 27 которой таквключает двигатель и червячную передачу, же выполнен из магнитопроводного матесвязанную с валом двигателя и с корпусом риала и связан с двигателем 28, а червячное 30 схвата, двумя дополнительными платфорколесо 29 жестко связано с корпусом 30 мами, тремя дополнительными приводами схвата и также имеет венец, образованный линейного перемещения, установленными полюсами постоянных магнитов, обеспечимежду этими платформами и шарнирно с вая бесконтактную передачу усилий. Привод губок 31 схвата, двигатель которого 35 ними связанными, а также приводом продольного перемещения о/Сной из дополнизакреплен на корпусе 30 схвата, имеет чертельных платформ, включающим два винта, вячную и винтовую передачи, конструкция три двигателя, три корпуса и установленные которых аналогична конструкции передач в каждом корпусе червячную передачу и гайприводов линейного перемещения, в которых усилие передается посредством маг- 40 ку, связанную через эту передачу с валом соответствующего двигателя, причем две нитмого поля, только винт 32 в этом случае, гайки расположены на одном из винтов, перемещаясь при вращении гайки 33, свотретья на другом, а корпусе жестко связаны дит или разводит губки 31 схвата. Позицией с этой дополнительной платформой, при 34 обозначен червяк, а позицией 35 червячное колесо червячной передачи. Шаровые 45 этом на др/гой дополнительной платформе установлены основная и дополнительные шарниры 36, связывающее приводы 7 и 9 с руки, а каждый из приводов линейного пеплатформами, сча&жены стопорами 37 для ремещения дополнительной платформы и предотвращения их вращения. платформ рук состоит из двигателя, корпуРабота промышленного робота осущеса, шарнирно связанного с одной из соседствляется включением двигателей соответ- 50 них платформ, и установленных в корпусе сгьующих приводов. Например, для винтовой и червячной передач, причем черперемещения всех трех рук одновременно вяк этого привода связан с валом двигателя, включаются двигатели привода продольноа червячное колесо жестко связано с гайкой го перемещения пла гформы 8, которые, вравинтовой передачи этого привода, винт кощая гайки в корпусах 12, обеспечивают 55 торого шарнирно связан с другой платфорперемещение ЗТОІЛ платформы вдоль винтов мой, при этом привод губок схвата состоит 10 и 11. Относитеньное изменение положеиз установленного на корпусе схвата двигания рук в пространстве обеспечивается изтеля, червячной и винтовой'передач, причем менением еылета винтов приводов гайка винтовой передачи через иервячную линейного перемещения 7 или 9 при зраще 1768380 5 6 венец червячного колеса червячной передапередачу связана с валом двигателя, а впит шарнирно связан с губками схватз, кроме чи являются полюсами магнитов и располотого, в каждой передаче всех приводов винт жены с зазором относитєпьно резьбовых и червяк выполнены из магнитопровсдного выступов соответствующего винта и зубцов материала, а резьбовые выступы гайки ш 5 соответствующего червяка. 5. цпшгштттшик ШШТШШТШ їїптптїїїїттпш щшшшшш і 768380 37 21 Шг.2 1768360 31 f>
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B25J 1/00
Мітки: промисловий, робот
Код посилання
<a href="https://ua.patents.su/6-24123-promislovijj-robot.html" target="_blank" rel="follow" title="База патентів України">Промисловий робот</a>
Пристрій перетворення поступального руху в обертальний
Номер патенту: 5354
Опубліковано: 28.12.1994
Автор: Рахманов Микола Миколайович
МПК: F16H 1/16
Мітки: пристрій, перетворення, обертальний, поступального, руху
Формула / Реферат:
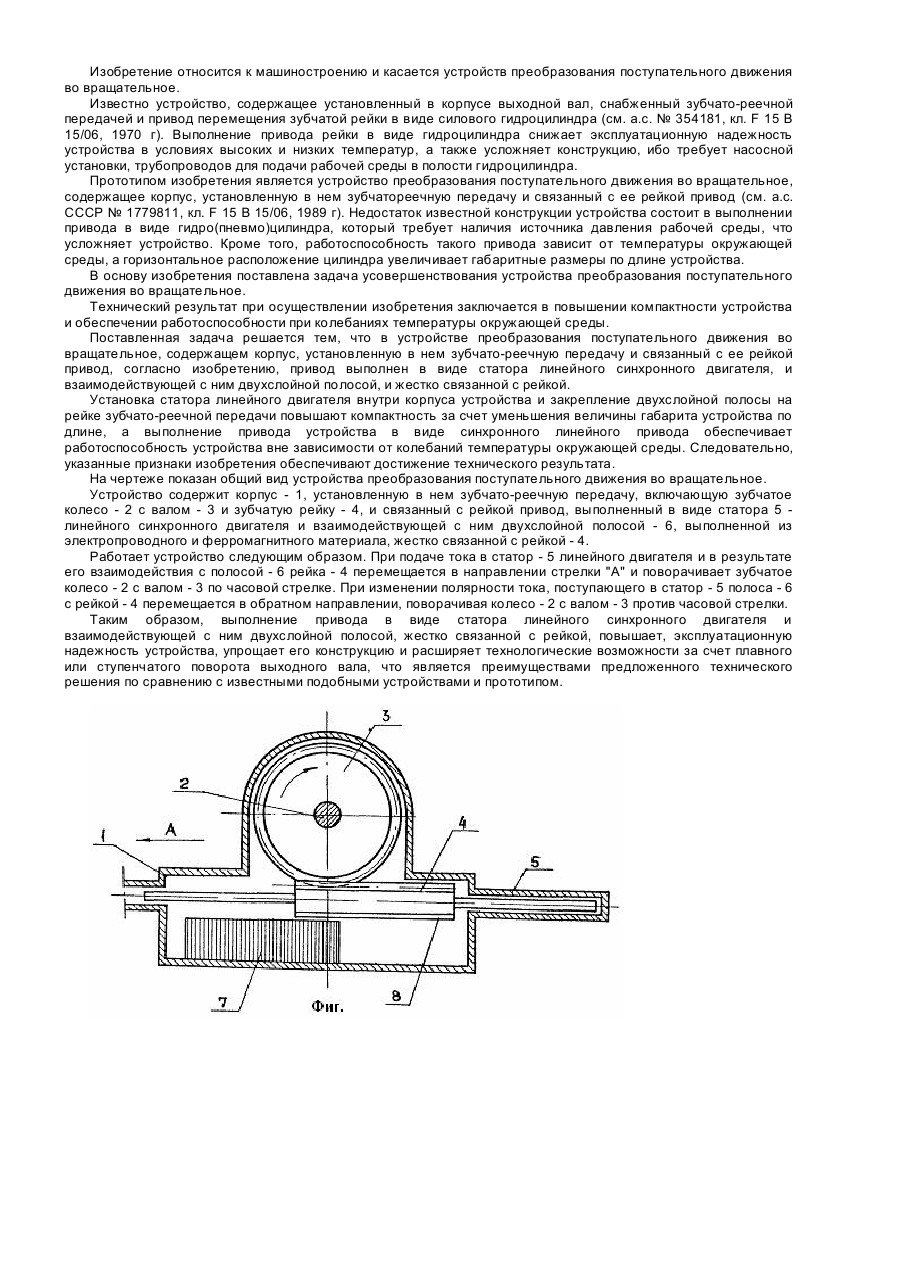
Устройство преобразования поступательного движения во вращательное, содержащее корпус, установленную в нем зубчато-реечную передачу и связанный с ее рейкой привод, отличающееся тем, что привод выполнен в виде статора линейного синхронного двигателя и взаимодействующей с ним двухслойной полосой, жестко связанной с рейкой.
Візок підвісної монорейкової дороги

Номер патенту: 18871
Опубліковано: 25.12.1997
Автор: Рахманов Микола Миколайович
МПК: B60L 13/00, B61B 13/04
Мітки: візок, дороги, монорейкової, підвісної
Формула / Реферат:
Тележка подвесной монорельсовой дороги, снабженная установленными в ее корпусе индуктором асинхронного линейного двигателя, отличающаяся тем, что индуктор смонтирован на поворотной платформе, один конец которого шарнирно закреплен на вертикальной оси в корпусе тележки, а другой снабжен подпружиненными роликами, установленными с возможностью взаимодействия с боковыми поверхностями ходового пути.
Механічний підсилювач потужності
Номер патенту: 10888
Опубліковано: 25.12.1996
Автор: Яворський Анатолій Іванович
МПК: F16H 1/16
Мітки: підсилювач, потужності, механічний
Формула / Реферат:
Механический усилитель мощности, содержащий привод и размещенные внутри корпуса промежуточный полый и выходной валы, а также червячную, зубчатую передачи и винтовую передачу с гайкой, отличающийся тем, что привод с промежуточным валом соединен последовательно установленными червячной и зубчатой передачами, а промежуточный с выходным, в качестве которого использован коленчатый вал, соединены посредством винтовой передачи с гайкой, при этом...
Механізм повороту лопаток компресора
Номер патенту: 14279
Опубліковано: 25.04.1997
Автор: Модзелевський Юрій Васильович
МПК: F04D 27/00
Мітки: лопаток, повороту, компресора, механізм
Формула / Реферат:
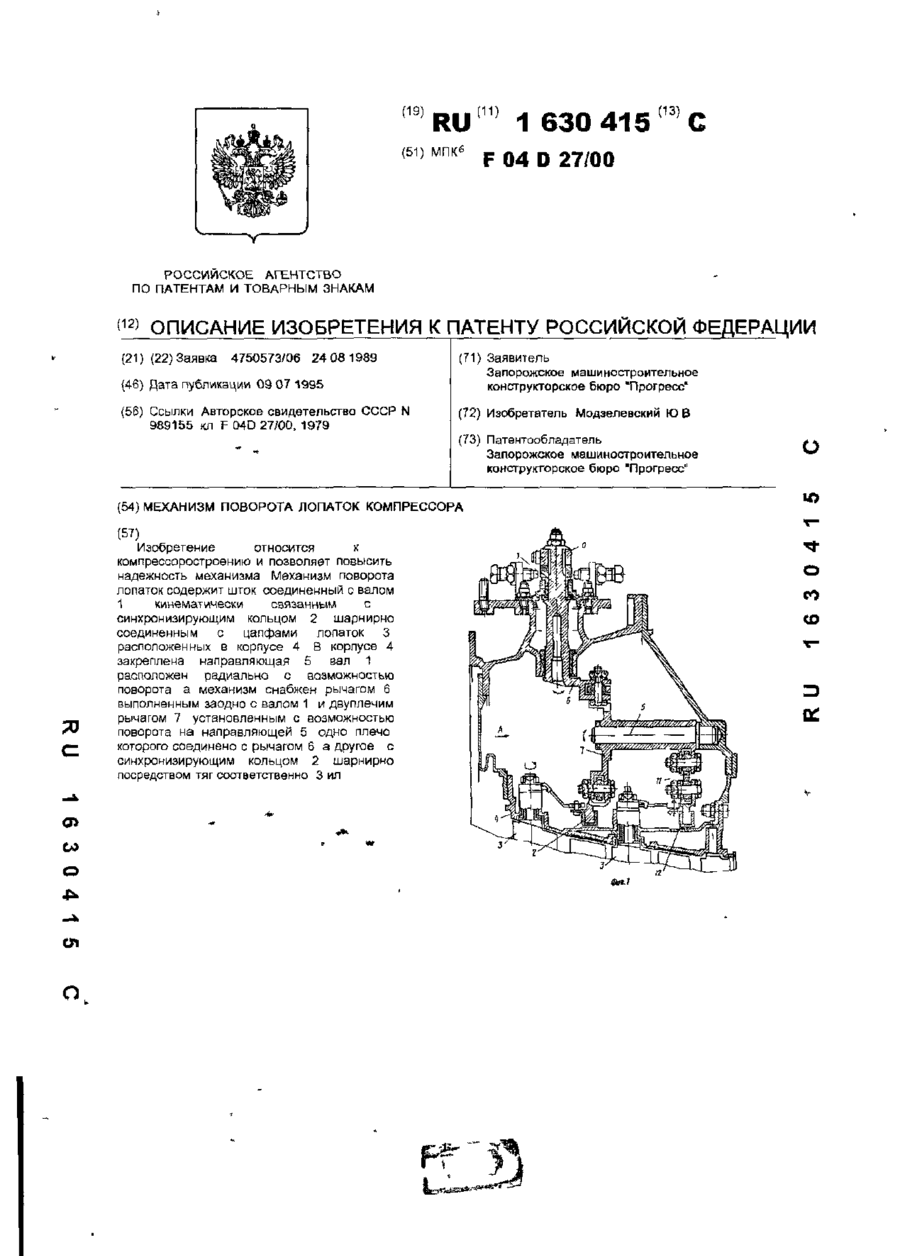
Механизм поворота лопаток компрессора, содержащий шток, соединенный с валом, кинематически связанным с синхронизирующим кольцом, шарнирно соединенным с цапфами лопаток, расположенных в корпусе, отличающийся тем, что, с целью повышения надежности, в корпусе закреплена направляющая, вал расположен радиально с возможностью поворота, а механизм снабжен рычагом, выполненным заодно с валом, и двуплечим рычагом, установленным с возможностью...
Механізм переміщення паперу в друкарській машині
Номер патенту: 6416
Опубліковано: 29.12.1994
Автори: Грабенко Анатолій Костянтинович, Ельберт Леонід Соломонович
МПК: B41J 1/00
Мітки: механізм, машини, паперу, друкарський, переміщення
Текст:
...габаритов привода бумагоопорного вала. направленными вдоль образующей цилиндра и охвачен полым цилиндром 8 из ферромагнитного материала, который жестко соединен с зубчатым колесом 4, находящимся в зацеплении с зубчатыми колесами 3. Полый цилиндр 8 намагничен так. что магнитные полюса направлены вдоль образующей и выполняет роль ротора шагового двигателя Вал 5 полый и в его полости расположены провода, соединенные с обмотками 9 статора 6,...
Попередній патент: Спосіб одержання плівки напівпровідникового оксидного скла
Наступний патент: Зупинник візків підвісного конвеєра
Випадковий патент: Лопатка колеса радіального вентилятора