Машина, що безперервно переміщується, для контрольованого виправлення колії
Текст
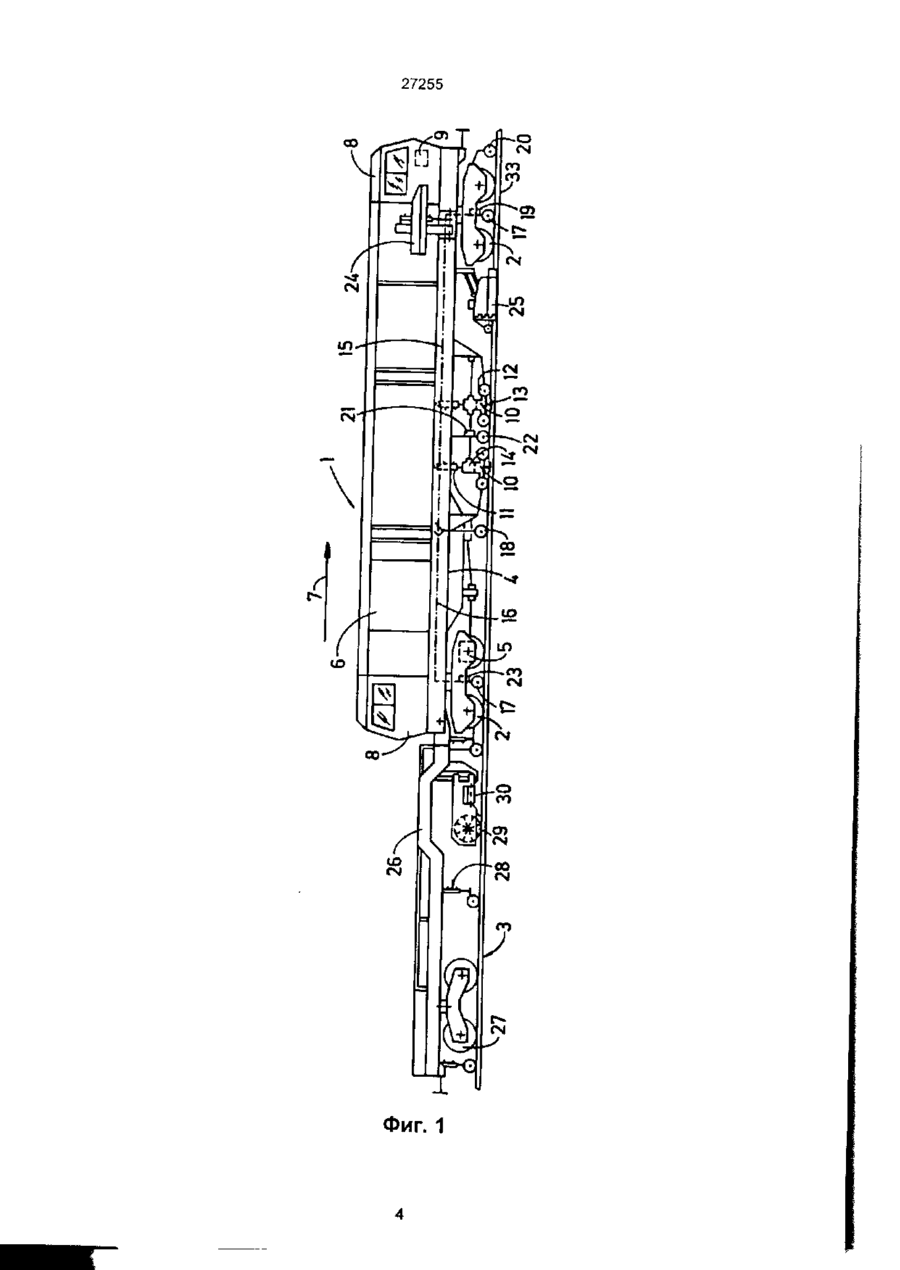
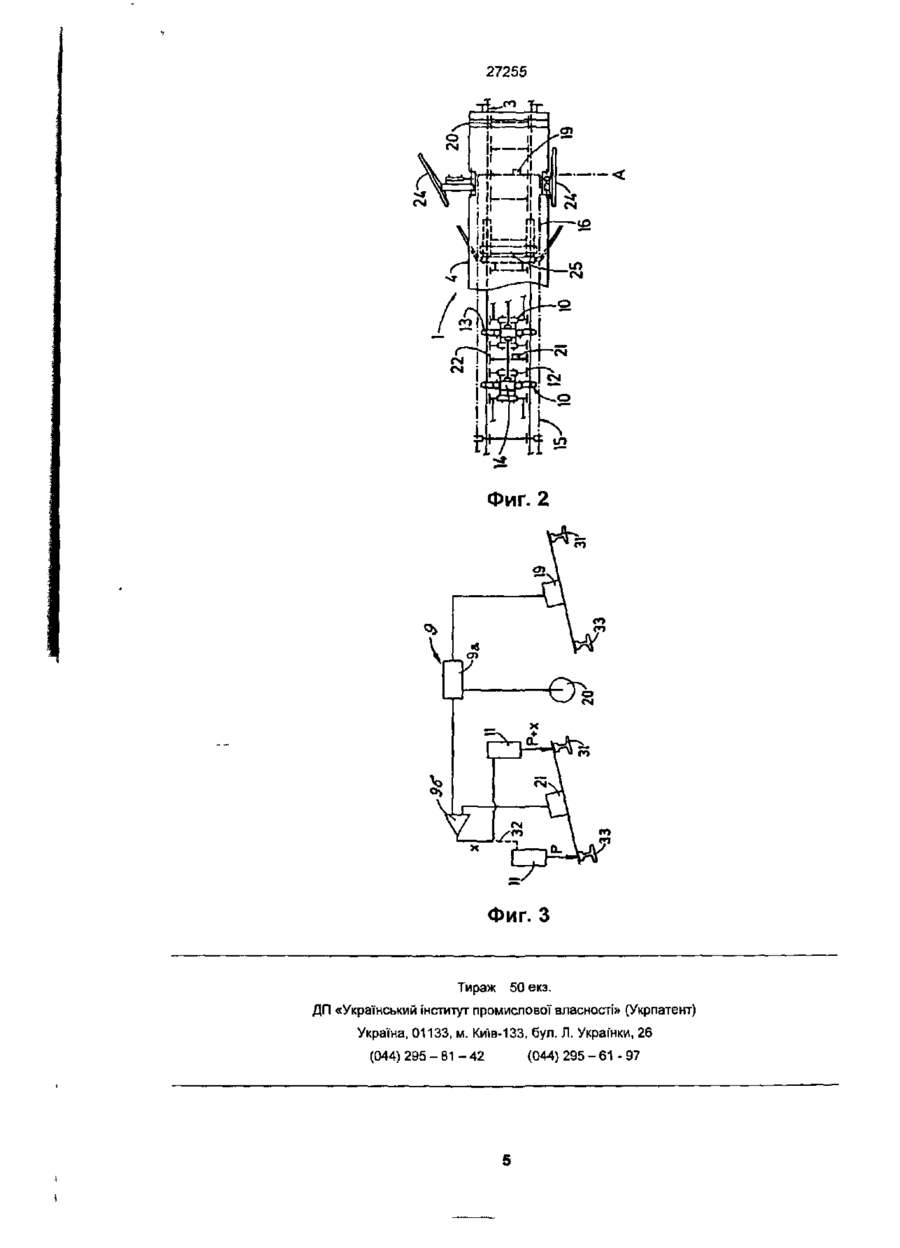
1 Непрерывно перемещающаяся машина для контролируемой выправки пути, содержащая опирающуюся на ходовые тележки с приводом раму, по меньшей мере один стабилизирующий агрегат, установленный на раме с возможностью перестановки по высоте и вертикального напруження приводами и включающий в себя вибратор направленных поперек машины горизонтальных колебаний, и смонтированные на раме блок управления приводами и систему измерения положения пути, включающую в себя измерительные тележки и связанную с ними базовую прямую отсчета, отличающаяся тем, что она снабжена смонтированным на раме датчиком пройденного пути и двумя датчиками уровня, первый из которых смонтиро Машина относится к устройствам для строительства и ремонта железнодорожного пути, в частности, к устройствам для выправки пути Известна непрерывно перемещающаяся машина для контролируемой выправки пути, содержащая опирающуюся на ходовые тележки с приводом раму, по меньшей мере один стабилизирующий агрегат, установленный на раме с возможностью перестановки по высоте и вертикального нагружения приводом и включающий в себя вибратор направленных поперек машины горизонтальных колебаний, и смонтированные на раме блок управления приводами и систему измерения положения пути, включающую в себя измерительные тележки и связанную с ними базовую прямую отс ван на раме в передней по направлению работы машины части, а второй - в зоне стабилизирующего агрегата, при этом блок управления приводами выполнен с элементом сравнения и элементом памяти, к которому подключены указанный первый датчик уровня и датчик пройденного пути, для выдачи с задержкой сигнала указанного первого датчика уровня, а выход элемента памяти и второй датчик уровня подключены к элементу сравнения, выход которого соединен с приводами вертикального нагружения стабилизирующего агрегата. 2 Машина по п.1, отличающаяся тем, что указанный первый датчик уровня смонтирован на первой по направлению работы машины измерительной тележке системы измерения положения пути. 3. Машина по п 1, отличающаяся тем, что она снабжена третьим датчиком уровня, соединенным с блоком управления и смонтированным на последней по направлению работы машины измерительной тележке системы измерения положения пути. 4 Машина по п.1, отличающаяся тем, что приводы вертикального нагружения стабилизирующего агрегата, расположенные с разных сторон от продольной плоскости симметрии машины, соединены с блоком управления с возможностью независимого друг от друга включения. чета (патент США № 4953467, М.кл. Е01В 27/00,1990). Недостаток известной машины заключается в том, что на путевых участках с поперечным уклоном машина не обеспечивает автоматический контроль за понижением пути. В основу изобретения поставлена задача усовершенствовать непрерывно перемещающуюся машину для контролируемой выправки пути путем обеспечения автоматического непрерывного контроля за выправкой пути в том числе и на путевых участках с поперечным уклоном. Указанная задача решена тем, что непрерывно перемещающаяся машина для контролируемой выправки пути, содержащая опирающуюся на ходовые тележки с приводом раму, по меньшей ме О 27255 ре один стабилизирующий агрегат, установленный на раме с возможностью перестановки по высоте и вертикального нагружения приводом и включающий в себя вибратор направленных поперек машины горизонтальных колебаний, и смонтированные на раме блок управления приводами и систему измерения положения пути, включающую в себя измерительные тележки и связанную с ними базовую прямую отсчета, снабжена смонтированным на раме датчиком пройденного пути и двумя датчиками уровня, первый из которых смонтирован на раме в передней по направлению работы машины части, а второй-в зоне стабилизирующего агрегата, при этом блок управления приводами выполнен с элементом сравнения и элементом памяти, к которому подключены указанный первый датчик уровня и датчик пройденного пути, для выдачи с задержкой сигнала указанного первого датчика уровня, а выход элемента памяти и второй датчик уровня подключены к элементу сравнения, выход которого соединен с приводами вертикального нагружения стабилизирующего агрегата. Кроме этого, указанный первый датчик уровня смонтирован на первой по направлению работы машины измерительной тележке системы измерения положения пути, при этом машина снабжена третьим датчиком уровня, соединенным с блоком управления и смонтированным на последней по направлению работы машины измерительной тележке системы измерения положения пути, а приводы вертикального нагружения стабилизирующего агрегата, расположенные с разных сторон от продольной плоскости симметрии машины, соединены с блоком управления с возможностью независимого друг от друга включения» На фиг 1 изображена непрерывно перемещающаяся машина для контролируемой выправки пути, общий вид. На фиг. 2 - т о ж е , частичный вид сверху в увеличенном масштабе. На фиг. 3 схема управления выправкой пути в поперечном профиле Непрерывно перемещающаяся машина 1 для контролируемой выправки пути имеет вытянутую машинную раму 4, которая с одной стороны соответственно через ходовую тележку 2 на путь 3 и с помощью привода 5 тележек 2 и центральной энергетической установки 6 перемещается в рабочем направлении, указанном стрелкой 7 В одной из обеих кабин 8 машиниста находится центральный блок 9 управления, выполненный с элементом памяти. Посредине между обоими ходовыми тележками 2 находятся два стабилизирующих агрегата 10, расположенных друг за другом в продольном направлении машины и шарнирно соединенных через тяги с рамой 4, Для обеспечения вертикальной дополнительной нагрузки между стабилизирующими агрегатами 10 и рамой 4 предусмотрены гидравлические приводы 11, нагружаемые с помощью блока 9 управления. Стабилизирующие агрегаты 10 содержат рельсовые захваты с четырьмя роликами 12 с гребнями и двумя роликовыми тарелками 13, прижимаемыми к внешней стороне рельсов. Два синхронизированных вибратора 14, имеющих маховую силу равную 320 кН, приводят путь 3 в горизонтальные колебания, направленные попе рек продольного направления машины. Их частота устанавливается в диапазоне от 0 до 45 кГц. Нагрузка, воздействующая на путь 3 посредством всего четырех приводов 11, составляет соответственно приблизительно 100 кН. Пропорционально действующая нивелирная эталонная система 15 измерения положения пути имеет в качестве эталонной базовой прямой отсчета хорду, натянутую над каждой рельсовой нитью и разнесенные вдоль машины измерительные тележки 17, катящиеся по пути 3. С помощью другой измерительной тележки 18, имеющей датчик высоты, контактирующий с хордами 16, осуществляется управление и контроль за понижением пути 3 путем соответствующего регулирования дополнительной нагрузки В передней по направлению работы машины 1 ее части установлен первый датчик 19 уровня, расположенный на некотором расстоянии от стабилизирующего агрегата 10 в продольном направлении машины и закрепленный на передней измерительной тележке 17 эталонной системы 15. Датчик 19 выполнен как электронный прецизионный маятник. С передней ходовой тележкой 2 соединен датчик 20 пройденного пути, катящийся по рельсовому пути 3. Между обоими стабилизирующими агрегатами 10 смонтирован еще второй датчик 21 уровня, который закреплен на перемещаемой по высоте измерительной тележке 22, катящейся по пути 3. Также и задняя в рабочем направлении машины измерительная тележка 17 оснащена третьим датчиком 23 уровня. Датчики 19,21,23 уровня также, как и датчик 20 пройденного пути, приводы 11 и вибраторы 14, соединены с блоком 9 управления, который предназначен, в частности, для промежуточного хранения измеренного значения поперечного уклона пути, определенного передним датчиком 19 уровня. Причем, блок 9 управления выполнен с элементом памяти 9а, к которому подключены первый датчик 19 уровня и датчик 20 пройденного пути для выдачи с задержкой сигнала указанного первого датчика 19 уровня Блок 9 управления имеет также элемент 96 сравнения, к которому подключены выход элемента 9а памяти и второй датчик 21 уровня Выход элемента 96 сравнения связан с приводами 11 вертикального нагружения стабилизирующего агрегата 10. В зоне передней ходовой тележки 2 на каждой продольной стороне машины находится перемещаемый в поперечном и вертикальном направлениях боковой плуг 24, с помощью которого по необходимости щебень переносится из боковой зоны в зону рельсового пути. Непосредственно позади него щебеночный плуг 25 для обработки центральной зоны пути соединен с рамой 4 с возможностью вертикального перемещения. Задний в рабочем направлении конец машины 1 соединен посредством шарнира с дополнительной рамой 26, задний конец которой опирается через ходовую тележку 27 на путь 3 Для контроля за понижением пути, осуществляемым с помощью стабилизирующих агрегатов 10, предусмотрена контрольно-измерительная система 28. Подметальная щетка 29, вращающаяся вокруг поперечной оси, с поперечным ленточным конвейером 30 закреплена на дополнительной раме 26 с возможностью 27255 вертикального перемещения и служит для удаления щебня, лежащего на шпалах. Ниже будет более подробно объяснен принцип действия соответствующей изобретению машины. Как только машина 1 въедет в зону с постоянно изменяющимся поперечным уклоном (возвышением одного рельса над другим) он определяется в зоне передней измерительной тележки 17 с помощью закрепленного на ней датчика 19 уровня и хранится в блоке 9 до тех пор, пока датчик 20 пройденного пути не выдаст число импульсов, соответствующее расстоянию между ним и вторым датчиком 21 уровня. Это означает, что запомненное измеренное значение предлагается для второго датчика 21 уровня в качестве заданного значения, как только второй датчик 21 достигнет того участка пути, в котором измеренное значение было измерено с помощью переднего датчика 19 уровня (см. фиг. 3). В области стабилизирующих агрегатов 10 происходит известным образом во взаимодействии с эталонной системой 15 контролируемое понижением пути, причем путем соответствующего изменения скорости продвижения и/или частоты вибрации и/или вертикальной дополнительной, соответственно основной нагрузки Р изменяется высота понижения пути. В случае поперечного уклона пути, измеренного передним датчиком 19 уровня, например, в зоне А пути (фиг. 2), регистрируется соответствующее измеренное значение уклона и запоминается элементом памяти блока 9 в качестве установки заданного значения для последующего понижения пути до тех пор, пока датчиком 20 пройденного пути не будет зарегистрировано продвижение машины, соответствующее расстояние между передним датчиком 19 и вторым датчиком 21 Эталонная система 15 для регистрации продольного профиля пути включается только на базовой стороне пути, т.е. на невозвышенном рельсе пути. С помощью второго датчика 21 уровня, нахо дящегося теперь вследствие непрерывного рабочего продвижения машины в зоне А пути, осуществляется текущее измерение поперечного уклона во время понижения пути, выполняемого стабилизирующими агрегатами 10, и оно в качестве действительного значения сравнивается с запомненной величиной заданного значения. Если при этом действительное значение больше, чем заданное, то вертикальная дополнительная нагрузка Р на стабилизирующие агрегаты 10 увеличивается путем более сильного нагружения приводов 11 в зоне возвышенного рельса 31 в соответствии со значением разности "х" так, что поперечный уклон перед началом работы машины 1 является идентичным поперечному уклону после контролируемого понижения пути с помощью стабилизирующих агрегатов 10. Путем постоянного сравнения поперечного уклона путч в рабочей зоне поперечный уклон, определенный первым датчиком 19, практически копируется для контролируемого понижения пути, так что после применения динамических стабилизирующих агрегатов 10 геометрия пути останется неизменной. Штриховой линией 32 на фиг. 3 указано, что значение "х" разности передается также и на приводы 11 левой стороны машины, если рельс 33 возвышен на правом закруглении пути Благодаря последующему третьему датчику 23 уровня существует возможность измерить поперечный уклон пути после применения агрегатов 10, например, для составления протокола. Для случая, если машина 1 не имеет дополнительной рамы 26, было бы возможно реверсирование ее рабочего направления, причем третий датчик 23 уровня согласно фиг. 1 и фиг. 2 применялся бы как первый датчик уровня, В частности в зонах стрелочных переводов теперь существует возможность автоматически компенсировать различные величины понижения пути, возникающие вдоль брусьев, путем соответствующего различного управления приводом 11, расположенными напротив друг друга поперек машины. 27255 со LJ
ДивитисяДодаткова інформація
Автори англійськоюToirer Joseph
Автори російськоюТойрер Йозеф
МПК / Мітки
МПК: E01B 27/20, E01B 35/00
Мітки: безперервної, контрольованого, машина, колії, виправлення, переміщується
Код посилання
<a href="https://ua.patents.su/6-27255-mashina-shho-bezperervno-peremishhuehtsya-dlya-kontrolovanogo-vipravlennya-koli.html" target="_blank" rel="follow" title="База патентів України">Машина, що безперервно переміщується, для контрольованого виправлення колії</a>
Машина для розподілу та ущільнення щебеневої баластної призми залізничної колії, яка безперервно переміщується
Номер патенту: 19157
Опубліковано: 25.12.1997
Автор: Йозеф Тойрер
МПК: E01B 27/00
Мітки: переміщується, колії, яка, ущільнення, безперервної, залізничної, щебеневої, призми, розподілу, машина, баластної
Формула / Реферат:
Изобретение относится к устройствам для ремонта железнодорожного пути.Известна непрерывно перемещающаяся машина для распределения и уплотнения щебеночной балластной призмы железнодорожного пути, содержащая раму, опирающуюся на две разнесенные на расстояние одна от другой ходовые тележки, смонтированные на раме энергетическую установку, контрольно-измерительную систему для измерения положения пути в продольном профиле, по меньшей мере...
Безперервно пересувна у процесі роботи виправочнопідбивочно-обробна машина
Номер патенту: 3602
Опубліковано: 27.12.1994
Автори: Йьора Ганц, Йоханн Хансманн
МПК: E01B 27/17
Мітки: пересувна, роботи, процесі, безперервної, виправочнопідбивочно-обробна, машина
Формула / Реферат:
1. Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина, содержащая раму, один конец которой оперт на ходовую тележку, смонтированные на раме кабину оператора, силовую установку, привод ходовой тележки, контрольно-измерительное устройство, включающее в себя базовую систему отсчета, дополнительную раму, один конец которой установлен в направляющих рамы машины, а второй оперт на вторую ходовую тележку, привод...
Машина для виправки залізничної колії
Номер патенту: 4781
Опубліковано: 28.12.1994
Автори: Йозеф Тойрер, Вільгельм Прашл
МПК: E01B 27/17
Мітки: залізничної, колії, виправки, машина
Формула / Реферат:
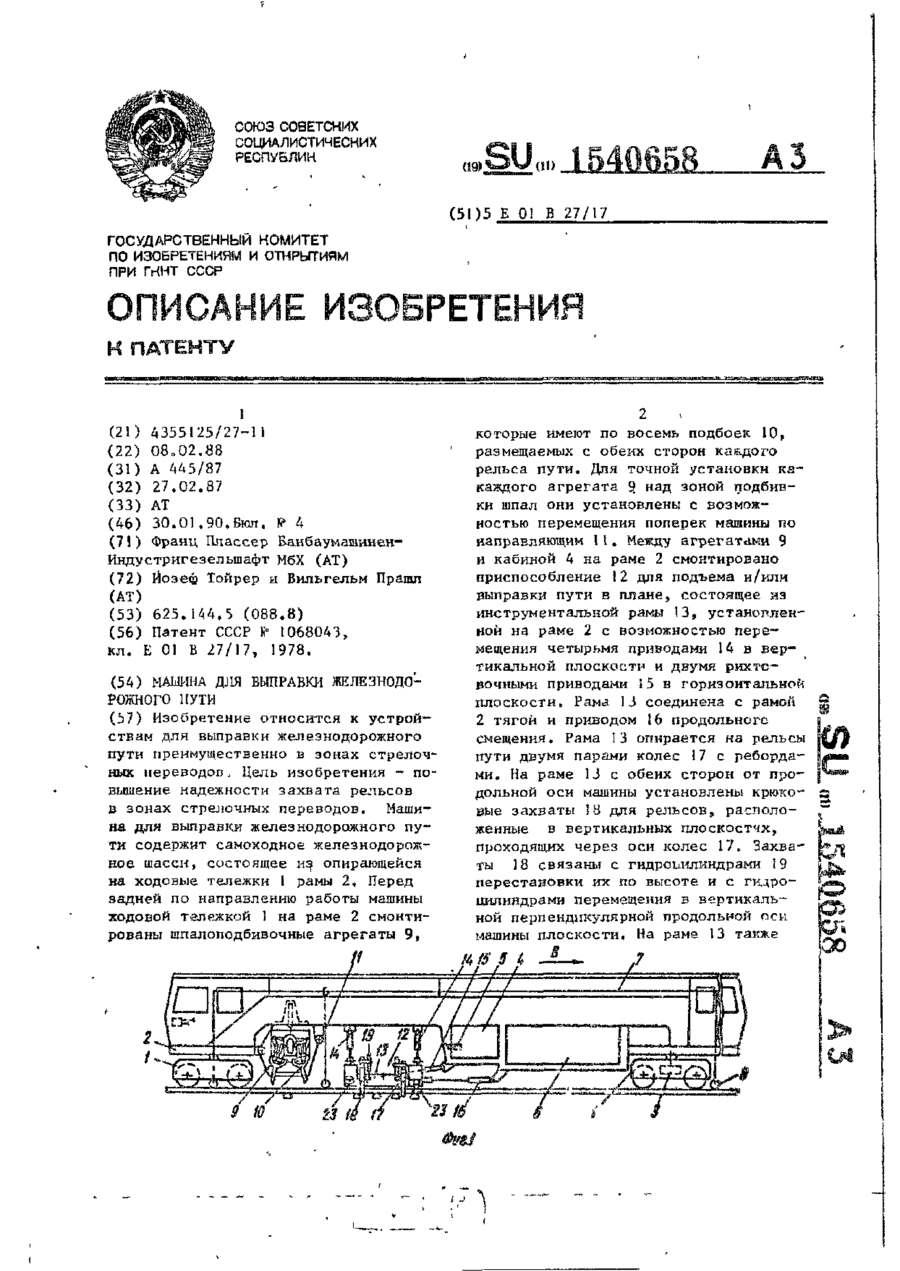
1. Машина для выправки железнодорожного пути, содержащее самоходное железнодорожное шасси, приспособление для подъема и/или выправки пути в плане в зонах стрелочных переводов, состоящее из инструментальной рамы, установленной на раме шасси с возможностью перемещения двумя приводами в вертикальной плоскости и двумя рихтовочными приводами в горизонтальной плоскости и соединенной с рамой шасси тягой, одной пары колес с ребордами для опирания...
Машина для перерозподілу щебеню баластної призми залізничної колії
Номер патенту: 13456
Опубліковано: 28.02.1997
Автори: Йозеф Тойрер, Фрідріх Оеллєрер
МПК: E01B 27/02
Мітки: перерозподілу, призми, баластної, залізничної, щебеню, колії, машина
Формула / Реферат:
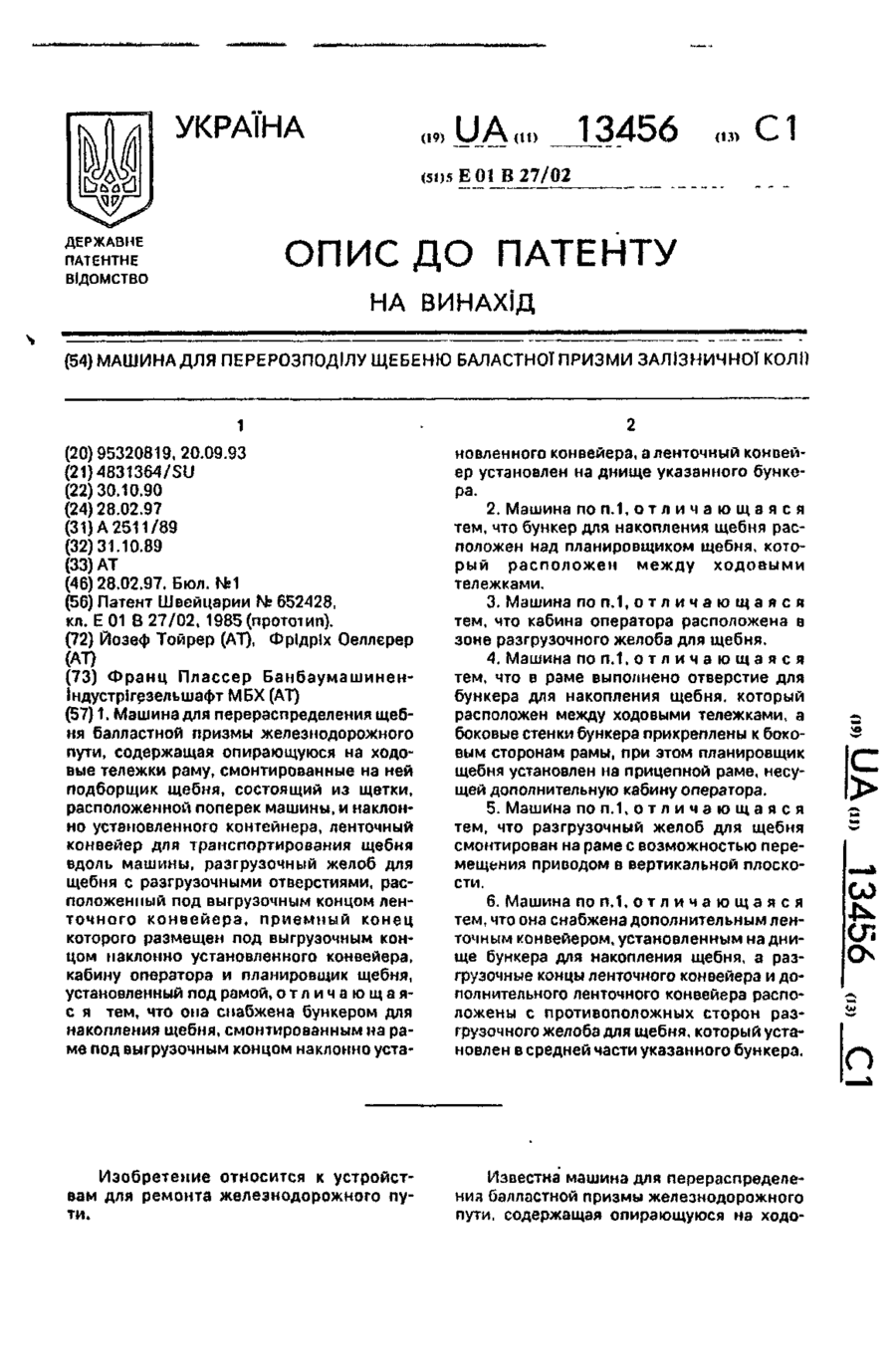
1. Машина для перераспределения щебня балластной призмы железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней подборщик щебня, состоящий из щетки, расположенной поперек машины, и наклонно установленного контейнера, ленточный конвейер для транспортирования щебня вдоль машины, разгрузочный желоб для щебня с разгрузочными отверстиями, расположенный под выгрузочным концом ленточного конвейера, приемный конец...
Машина для виправлення залізничного шляху
Номер патенту: 4785
Опубліковано: 28.12.1994
Автори: Йоханн Піхлер, Йозеф Тойрер
МПК: E01B 33/00, E01B 27/17
Мітки: виправлення, машина, шляху, залізничного
Формула / Реферат:
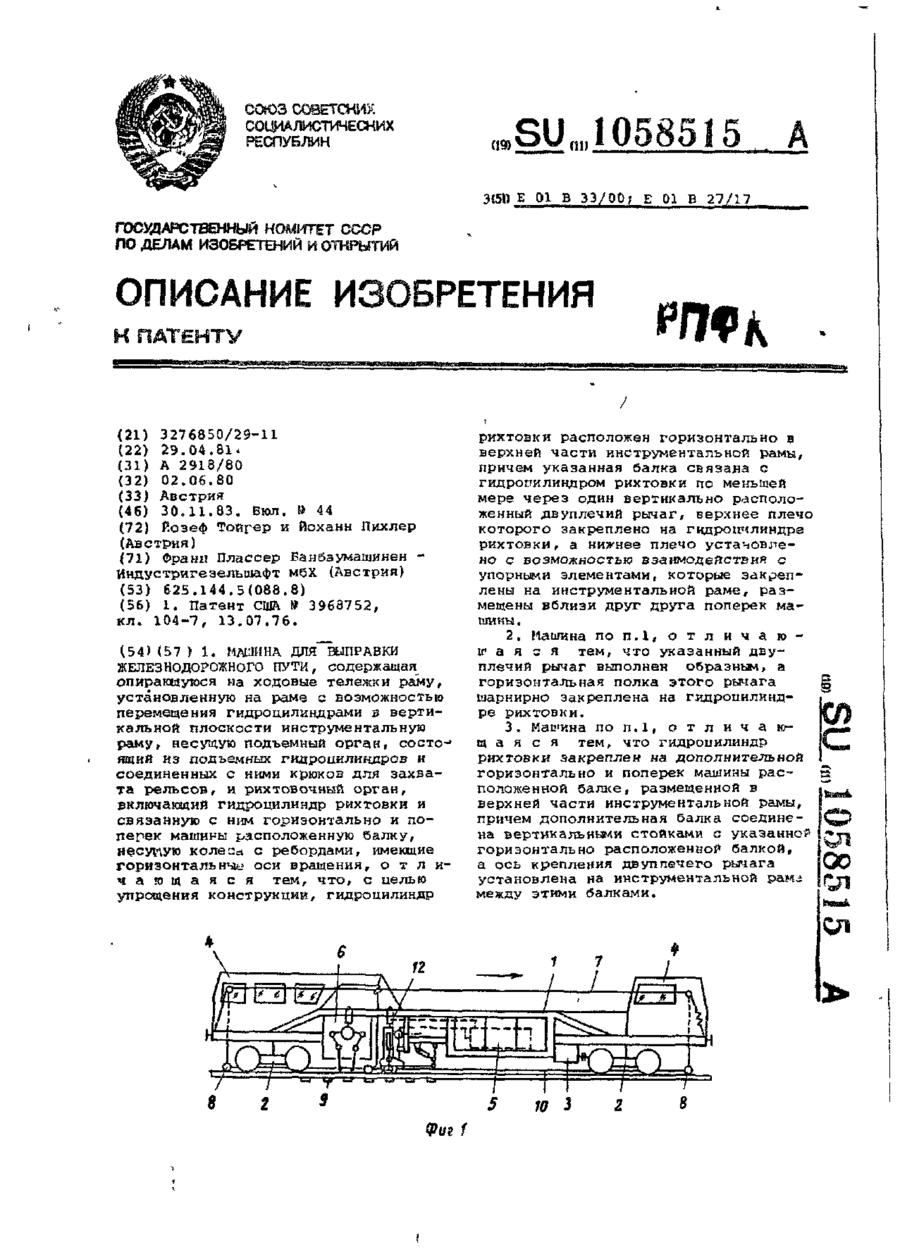
1. Машина для выправки железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, установленную на раме с возможностью перемещения гидроцилиндрами в вертикальной плоскости инструментальную раму, несущую подъемный орган, состоящий из подъемных гидроцилиндров и соединенных с ними крюков для захвата рельсов, и рихтовочный орган, включающий гидроцилиндр рихтовки и связанную с ним горизонтально и поперек машины расположенную балку,...