Спосіб визначення орієнтації осі свердловини
Номер патенту: 30032
Опубліковано: 15.11.2000
Автори: Анупрієнко Генадій Єфремович, Рудик Юрій Микитович, Гусєв Олексій Володимирович, Карпачов Юрій Андрійович

Формула / Реферат
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yoz розташований вектор ![]() абсолютної кутової швидкості обертання Землі, вимірюють проекції
абсолютної кутової швидкості обертання Землі, вимірюють проекції ![]() та
та ![]() вектора
вектора ![]() на осі oy та oz відповідно, а потім проекції Lx, Ly та Lz на осі ox, oy та oz одиничного вектора
на осі oy та oz відповідно, а потім проекції Lx, Ly та Lz на осі ox, oy та oz одиничного вектора ![]() , спрямовавмого по осі свердловини в місці розташування гіроскопічного інклінометра, визначають у відповідності з виразами:
, спрямовавмого по осі свердловини в місці розташування гіроскопічного інклінометра, визначають у відповідності з виразами:
![]()
де ![]() GL, GN, GM - проекції вектора сили тяжіння на ортогональні осі
GL, GN, GM - проекції вектора сили тяжіння на ортогональні осі ![]() ,
, ![]() ,
, ![]() системи координат гіроскопічного інклінометра, розташованого в свердловині, при цьому одна із осей
системи координат гіроскопічного інклінометра, розташованого в свердловині, при цьому одна із осей ![]() співпадає по напрямку з віссю свердловини, а
співпадає по напрямку з віссю свердловини, а ![]() ;
; ![]() ; WL; WN; WM – проекції вектора
; WL; WN; WM – проекції вектора ![]() на ортогональні осі
на ортогональні осі ![]() ,
, ![]() ,
, ![]() системи координат гіроскопічного інклінометра;
системи координат гіроскопічного інклінометра; ![]() .
.
2. Спосіб по п.1, який відрізняється тим, що, WL, WN, та WM вимірюють одним і тим же вимірювальним приладом (акселерометром) при цьому розвертають його вісь чутливості в просторі в напрямку ![]() ,
, ![]() ,
, ![]() .
.
3. Спосіб по п.1, який відрізняється тим, що GL, GN, GM вимірюють одним і тим же вимірювальним приладом (датчиком кутової швидкості), при цьому розвертають його вісь чутливості в просторі в напрямку ![]() ,
, ![]() ,
, ![]() .
.
4. Спосіб по п.1, який відрізняється тим, що Wy та Wz вимірюють одним і тим же вимірювальним приладом (датчиком кутової швидкості), при цьому розвертають його вісь чутливості в просторі в напрямку oy та oz.
5. Спосіб по пп.1-4, який відрізняється тим, що визначають абсолютні величини ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , для чого вимірюють вищезгадані проекції в двох протилежних напрямках, а потім визначають середнє арифметичне абсолютних значень виміряних проекцій.
, для чого вимірюють вищезгадані проекції в двох протилежних напрямках, а потім визначають середнє арифметичне абсолютних значень виміряних проекцій.
Текст
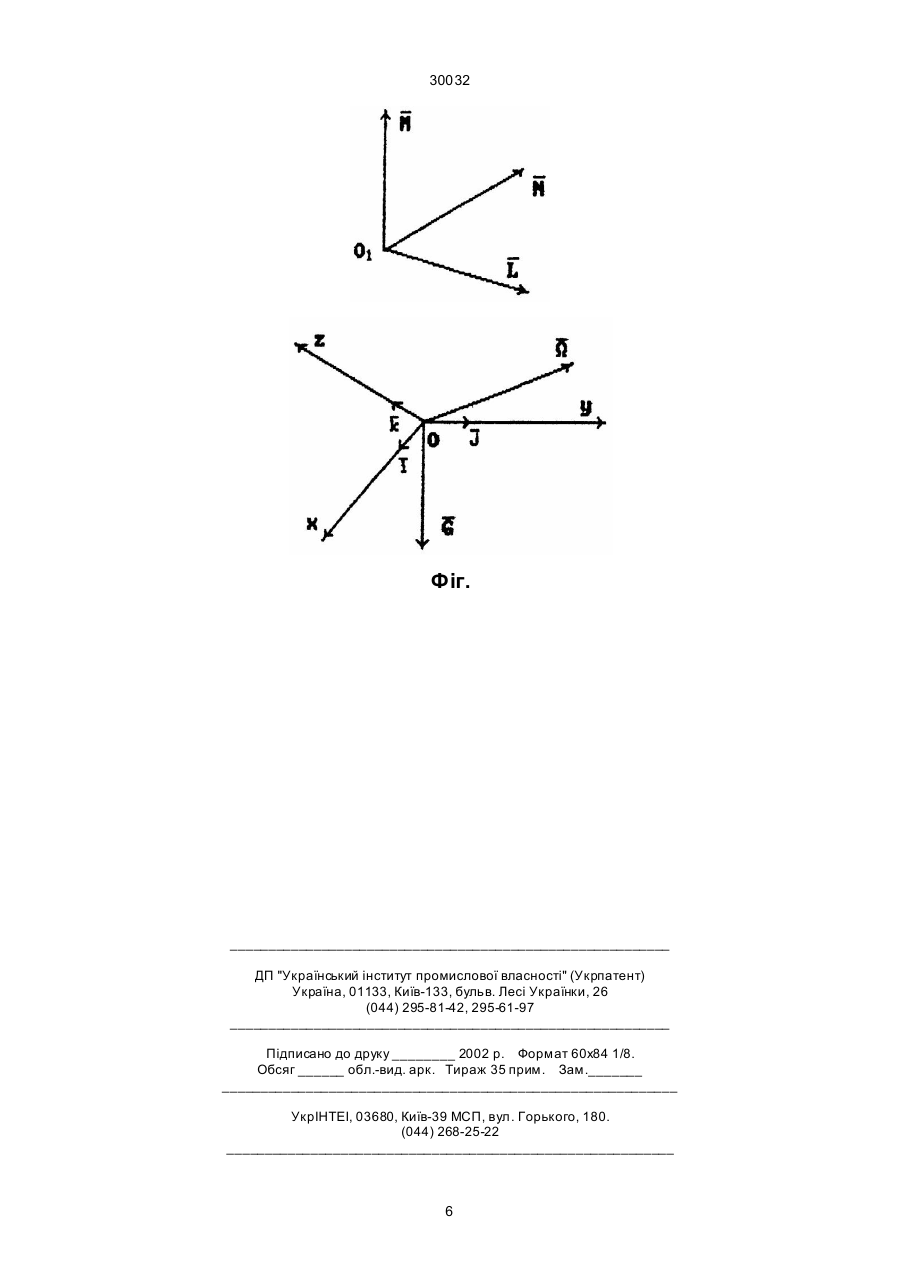
1. Спосіб визначення орієнтації осі свердловини, який містить операції вимірювання проекцій вектора сили тяжіння та проекцій вектора абсолютної кутової швидкості обертання Землі на ортогональні осі системи координат гіроскопічного інклінометра, розташованного в свердловині, який відрізняється тим, що на поверхні свердловини вибирають систему координат oxyz, де вісь oz спрямована по вертикалі Землі, а в площині yo z роз Винахід відноситься до технічної фізики і може бути використаний при визначенні орієнтації осі свердловини, пробуренної в феромагнітному середовищі або обсадженної феромагнітними трубами. Відомі способи визначення орієнтації осі свердловини, (наприклад, Морозов Ю.Т. Методика и техника направленного бурения на твердые поле зные ископаемые. Л.: Недра, 1987, с.183-184), побудовані на використанні гіроскопічних інклінометрів. По принципу дії ці інклінометри є зберігачами попередньо заданого азимутального напрямку. Перед спуском інклінометра в свердловину здійснюється відповідна його орієнтація, запуск гіроскопа, визначення його дрейфу та компенсація цього 30032 дрейфу. Весь цей процес достатньо тудомістсьПоставлена задача вирішується тим, що в спокий. При роботі інклінометра в свердловині, внасобі визначення орієнтації осі свердловини, який слідок неточності компенсації дрейфу та його немістить в собі операції вимірювання проекцій векпостійності, з часом буде наростати похибка в витора сили тяжіння та проекцій вектора абсолютної значенні азимутального напрямку. Для характеркутової швидкості обертання Землі на ортогональних для таких інклінометрів неврахованних дрейні осі системи координат гіроскопічного інклінометфів гіроскопів в 4-5 градусів/годину допустимий ра, розташованого в свердловині, згідно винаходу час його роботи в свердловині, з моменту його кана поверхні свердловини вибирають систему коорлібровкй на поверхні, складає біля години. Часто динат oxyz, де вісь oz спрямована по вертикалі Зецього часу виявляється мало, особливо для глимлі, а в площині оуz розташованний вектор W аббоких свердловин. Неможливо також створити на солютної кутової швидкості обертання Землі, витакому принципі інклінометричні засоби для довгомірюють проекції W y i W z вектора W на осі oy та oz тривалого їх перебування в свердловині. Кутове відповідно, а потім проекції Lx, Ly та Lz на осі ox, oy положення інклінометра відносно вертикального напрямку визначається пристроями, в яких викотa oz одиничного вектора L , спрямованого по осі ристовується принцип фізичного маятника. Констсвердловини в місці розташування гіроскопічного руктивно гіроскопічний зберігач азимутального наінклінометра, визначають у відповідності з вирапрямку та фізичний маятник достатньо складні та зами: громіздкі і ці складності суттєво зростають при збіö W æG льшенні допустимих зенітних кутів свердловин. Ці ç N WM GM W N ÷ Lx = × × ; ç обставини, при заданих діаметрах свердловин, обWy ç G c Wc G c W c ÷ ÷ межують застосування інклінометрів, котрі розгляè ø даються, зенітними кутами в 30° і, в окремих випаWL W G W дках, кутами в 60 градусі в. Ly = × + L × z; За прототип прийнятий спосіб визначення куW c Wy G c Wy тової орієнтації свердловин, описаний в описі винаходу до патенту Російської Федерації G Lz = - L , № 2057291, G01С9/00, Е21В47/022, заявка Gc № 5054665/28 від 17.07.1992, опубл. 27.03.1996, Бюл. № 9, автор Тіль Анатолій Валентинович, який де W = W 2 + W 2 ; GL, GN , GM - проекції сили тяy z полягає у визначенні зенітного кута і кута відхилювача за допомогую гіроскопічного інклінометра, жіння G на ортогональні осі L , N , M системи корозташованого в свердловині, при цьому зенітний ординат гіроскопічного інклінометра, розташованокут і кут відхилювача визначають за результатами го в свердловині, при цьому одна із осей L співвимірювань проекцій вектора сили тяжіння на орпадає по напрямку з віссю свердловини; тогональні осі системи координат інклінометра і додатково визначають напрямок географічного 2 2 G c= G2 + GN + GM ; W L; W N; W M - проекції вектора L мередіана в свердловині за результатами вимірювань в інклінометрі не меньше двох проекцій векW на ортогональні осі L , N , M системи коордитора абсолютної кутової швидкості обертання Земнат гіроскопічного інклінометра; лі на ці осі. 2 2 2 Wc WL + W N + WM . Недоліком прототипу є велика складність, по- = в'язана з необхідністью розв'язання нелінійних Крім того, пропонується як окремий варіант, тригонометричних рівнянь для визначення зеніт-якщо можливо, вимірювати GL, GN, GM одним і тим ного кута, кута відхілення та азимутального кута. же вимірювальним приладом розвертаючи його осі Крім того, після визначення згаданих кутів для вичутливості в просторі в напрямках L , N та M . значення орієнтації осі свердловини як вектора в Крім того, пропонується як окремий варіант, вибранній системі координат необхідно скласти та якщо можливо, вимірювати W L; W N; WM одним і тим розв'язати рівняння по визначенню проекцій осі же вимірювальним приладом, розвертаючи його свердловини як вектора на осі вибраної системи координат для визначення траєкторії координат в вісь чутливості в просторі в напрямках L , N просторі. та M . В основу винаходу поставлена задача вдоскоКрім того, пропонується як окремий варіант, налення способу визначення кутової орієнтації якщо можливо, вимірювати W y, W z одним і тим же свердловин, в якому за рахунок вибору на поверхвимірювальним приладом, розвертаючи його вісь ні свердловини системи координат oxyz, де вісь oz чутливості в просторі в напрямках oy та o z. направлена по вертикалі до Землі, а в площині yoz Крім того, пропонується в окремому випадку, розташованний вектор W абсолютної кутової швиякщо можливо, визначати абсолютні величини дкості Землі, та вимірювання проекцій W y i W z векGL , GN , GM , W L , WN , WM , W y , Wz , шлятора W на осі oy та oz забезпечується відразу по хом вимірювання вищезазначених проекцій в двох приведених в формулі винаходу виразах визнапротилежних напрямках, а потім визначати середчення проекцій осі свердловини як вектора L на нє арифметичне двох абсолютних значень виміосі вибранної системи координат oxyz, і за рахунок рянних проекцій. цього відпадає необхідність у розв'язанні нелінійОкремі пропонуємі варіанти зменшують кільних тригонометричних рівнянь для визначення зекість потрібних, згідно з пропонуємим способом, нітного кута, кута відхилювача та зенітного кута. вимірювальних приладів (в кращому випадку по 2 30032 трібен тільки один акселерометр і тільки один датчик кутової швидкості) та підвищує точність, зменшуючи похибки від польових сигналів та від відхилення дійсної крутизни вихідного сигналу вимірювального приладу від експлуатаційної, гарантованої технічними умовами. Суть винаходу пояснюється кресленням (фіг.), g ×L = g ×N = - вектор сили тяжіння; W - вектор абсолютної кутової швидкості Землі; O1 - точка на осі свердло Gx g ×M = де охуz - вибрана довільно система координат; G Gx Gx Lx + G Nx + G Mx + G вини; L - одиничний вектор напрямку осі свердло w×L = Wx вини; N , M - одиничні вектори, ортогональні один до одного та до вектора L , при цьому L = N ´ M ; i , w×N= Wx w×M= Wx j , k - одиничні орти системи координат oxyz. Вектори G та W в системі координат oxyz можна навести в наступному вигляді, помірявши акселерометром і датчиком кутової швидкості відповідно Gx, G y, Gz i W x, W y, W z: G = G x i + G y j + G z k, W = W x i + W y j + W z k. W W W Lx + Nx + Mx + (1) G Gy G Wy W Wy W Wy W Ny + My + Ly + Ny + My + Gz G Mz = G W Gc Nz = Gz Wz GL Lz = Wz W Nz = Wz W Mz = ; GN Gc ; GM ; Gc WL Wc (5) ; WN Wc ; WM Wc æ i ç çLx çN è x . ції на вектори L , N , M : G(GL , GN, GM ), (3) W( WL , W N, WM ), де проекції можливо виміряти усередині свердловини акселерометром та датчиком кутової швидкості. j Ny My k ö ÷ N z ÷ = L x i + L y j + L z k; Mz ÷ ø j My Ly (6) k ö ÷ L z ÷ = M x i + M y j + M z k; Nz ÷ ø æ i ç çM x çL è x Нехай вектори G та W мають наступні проек j Ly Ny æ i ç ç Nx çM è x (2) M = Mx i + My j + Mz k, де проекції (Lх, L y, Lz), (Nх, Ny, Nz) та (Mх, My, Mz) невідомі. k ö ÷ M z ÷ = N x i + N y j + N zk . Lz ÷ ø (7) Із (7) отримаємо: M x = L yN z - L zN y ; L x = N yM z - N zM y ; (8) N x = M y L z - M zL y . Із (1) та (2) виэначемо одиничні вектори g æ ö æ ö ç W Wy Wz ÷ ç W W Ny WM ÷ wç x , , = wç L , , ÷ ÷, ç W W W ÷ ç Wc Wc Wc ÷ è ø è ø Gy G Lz = L ´ N = M;ü ï N ´ M = L;ý M ´ L = N,ï þ L = L x i + L y j + L z k; та w спрямовані по G та W відповідно: æ ö æ ö ç G Gy Gz ÷ ç G GNy GM ÷ gç x , , = gç L , , ÷ ÷; ç G G G ÷ ç G c G c Gc ÷ è ø è ø G Gz Ly + Складемо окремий добуток векторів L , N , M, використовуючи (2): Вектори L , N , M в системі координат oxyz можна навести в наступному вигляді: N = Nx i + Ny j + Nz k; Gy Розглянемо окремий випадок вибору системи координат oxyz, а саме такий, що G x = G y = 0; Gz = - G ; (4) (9) W x = 0, тобто площина yo z співпадає з площиною, в якій знаходятся вектори G та W , а вісь oz спрямована де G , G c , W , W c - абсолютні значения векто протилежно вектору G . З рівнянь (5) з урахуванням (8) та (9) отримуємо: G Lz = - L ; Gc рів G та W , причому індекс "с" вказує на визначення G c та W c за результатами вимірювань усередині свердловини, а відсутність індексу "с" вказує на визначення G та W за результатами Nz = вимірювань на поверхні свердловини. Складемо скалярний добуток одиничних векторів, використовуючи (2) та (1): Mz = 3 GN Gc GM Gc ; ; 30032 W WL (10) W Ly = × + × z; W c Wy G c Wy WN Ny = W c My = W × WM W × GL GN + Gc y W W c Wy + × - виміряти при допомозі датчика кутової швидкості проекції W на осі oy та oz; тобто виміряти W y та W z; - визначити за результатами вимірювань W y та Wz ; Wy W z величину W = W 2 + W 2 ; y z - виміряти усередині свердловини в заданній точці при допомозі акселерометра проекції сили Wz ; Gc Wy GM тяжіння G на напрямки осей L, N, M, де осі N × та M складають з віссю L праву ортогональну систему координат, тобто виміряти величини GL, GN та GM; - визначити за результатами вимірювань GL, æ ö æ ö W çW G W ÷ ç G ÷ Lx = ç N × + N × z ÷ × ç- M ÷ ç W c Wy G c Wy ÷ ç Gc ÷ è ø è ø æ öæ ö W ç G ÷çW G W ÷ - ç- N ÷ ç M × + M × z÷= ç Gc ÷ ç W c Wy Gc Wy ÷ è øè ø GM W N W GM G N W z =× × × × + Gc W c Wy Gc G c Wy + GN Gc × WM Wc × W + Wy GN Gc × GM Gc × 2 2 GN та GM величину G c = G 2 + GN + GM ; L - виміряти усередині свердловини в заданній точці при допомозі датчика кутової швидкості проекції абсолютної кутової швидкості Землі W на напрямки осей L, N, M, тобто виміряти величини W L, W N, W M; - визначити за результатами вимірювань W L, Wz = Wy 2 W N, та W M величину W c = W 2 + WN + W 2 ; L M - по вимірянним значенням W y, W z, W L, W N, W M, GL, GN та GM та по визначенним значенням W , W æ GN W M GM WN ö ç ÷ × × . Wy ç G c W c G c W c ÷ ç ÷ è ø Оскільки нас цікавить тільки одиничний вектор L напрямку осі свердловини, то для цього з (10) можна використати тільки три наступних вирази: W æ GN W M GM WN ö ç ÷ Lx = × × ; Wy ç G c W c G c W c ÷ ç ÷ è ø = Ly = WL × W W c Wy Lz = + Wz ; G c Wy GL GL Gc × W c i G c вирахува ти за формулами Lx = W æ GN W M GM WN ö ç ÷ × × ; Wy ç G c W c G c W c ÷ ç ÷ è ø Ly = WL × W + W c Wy Lz = (11) Wz ; G c Wy GL GL Gc × ; проекції одиночного вектора L , спрямованного в напрямку осі свердловини в даній точці, на осі вибраної системи координат oxyz. Якщо можливо виміряти при допомозі тільки одного датчика кутової швидкості W y та W z, то крім зменшення кількості датчиків для виконання цієї операції до одного досягається, при цьому, наступний позитивний ефект. При вимірюванні W y та W z двома датчиками отримуємо: Uy Wy = ; ay (12) Uz Wz = , az де Uy та Uz - величини вихідних сигналів датчиків кутової швидкості по осі oy та по осі oz; a y та a z крутизна вихідної характеристики датчиків кутової швидкості по осі oy та по осі oz. З (12) витікає, що ; де W = W2 = W2 , y z 2 2 G c = G 2 + GN + GM ; L 2 W c = W 2 + W 2 + WM . L N Таким чином, для визначення орієнтації одиничного вектора L , який збігається з напрямком осі свердловини, потрібно виконати наступні операції в такій послідовності: - на поверхні свердловини вибрати систему координат oxyz таку, що вісь oz спрямована по вертикалі Землі (показання акселерометра, вимірюючого проекцію сили тяжіння на осі ox та o y повинні дорівнювати нолю), а вектор абсолютної кутової швидкості Землі W лежить в площині yoz (показання датчика кутової швидкості по осі ox повинні дорівнювати нолю, для чого можна повертати вісь ox навкруги вертикальної oci oz до тієї пори, поки показання датчика кутової швидкості по осі ox стануть дорівнювати нолю; W = 4 U2 y a2 y + U2 z . a2 z (13) 30032 Тому вирази W та Ly та Lz, а також спрощення обчислювань - Lх, L y та Lz за рахунок підстановки замість GL, GN, GM та Wz , які входять в (11) з Wy Wy урахуванням (12) і (13) будуть наступні: U2 y W = + a2 y U2 z a2 z U2 y × ay = + U2 z G c відповідно величин вихідних сигналів акселерометра UGL, UGN, UGM, та a2 y a2 z ; U2 + U2 + U2 , і підGL GN GM становка замість W L, W N, W M та W c відповідно ви(14) хідних сигналів датчика кутової швидкості UWL, W z Uz ay = , W y Uy az тобто будуть залежати від крутизни вихідних характеристик датчиків кутової швидкості по осі oy та oci oz. Похибки крутизни a y та a z приведуть до похи UWN, U WM та U2 L + U2 N + U2 M ) досягається при W W W вимірюванні величин GL, GN, GM одним акселерометром, а величин W L, WN, та WM одним датчиком кутової швидкості. Однією з причин зниження точності є нольовий сигнал U0 в вихідному сигналі вимірювального приладу. Наприклад, UGL = UGLT + U0 , (16) де UGLT - точне значення, яке повинен би показувaти акселерометер при відсутності нольового сигналу. Якщо вимірятиму саму величину у зворотньому напрямку, то вихідний сигнал буде дорівнювати UGLП = - UGLT + U0 , (17) де UGLП - величина ви хідного сигналу, виміряного в протилежному напрямку до вектора L . Середнє арифметичне від абсолютних значень (16) та (18) буде дорівнювати: UGL + UGLП = 2 U + U0 + UGLT - U0 (18) = GLT = UGLT , 2 тобто, якщо вимірювання виконувати у двох протилежних напрямках одним і тим же приладом, та визначати абсолютну величину вимірювання як середнє арифметичне від абсолютних величин отриманих двох вимірів, то при незмінності польового сигналу отримується точне абсолютне значення вимірюванної величини, а що стосується знаку, то він визначається знаком вихідного сигналу при вимірюванні вздовж потрібного напрямку. Wy Uy Uy W Wz та . Якщо виміWy Wy рювання виконувати одним і тим же датчиком кутової швидкості спочатку по осі oy, а потім по осі oz, то a y=a z із (14) отримуємо: бок визначення виразів W Wy = U2 + U2 y z Uy ; (15) W z Uz = , W y Uy тобто від крутизни вихідної характеристики датW Wz та не заWy Wy лежать, крутізну можна навіть і не знати, головне щоб датчик був лінійним. При цьому спрощується чика кутової швидкості вирази W Wz та , тому що вони прямо Wy Wy визначаються із вихідних сигналах датчика Uy та Uz. Аналогічний позитивний ефект (зменшення потрібної кількості вимірювальних приладів, підвищення точності за рахунок вилучення крутизни вихідних характеристик з виразів для визачення Lх, обчислювання 5 30032 Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod to determine orientation of well axis
Автори англійськоюAnuprienko Hennadii Yefremovych, Husiev Oleksii Volodymyrovych, Karpachov Yurii Andriiovych, Rudyk Yurii Mykytovych
Назва патенту російськоюСпособ определения ориентации оси скважины
Автори російськоюАнуприенко Геннадий Ефремович, Гусев Алексей Владимирович, Карпачев Юрий Андреевич, Рудик Юрий Никитович
МПК / Мітки
МПК: E21B 47/00, G01C 9/00, E21B 47/02
Мітки: свердловини, спосіб, орієнтації, визначення, осі
Код посилання
<a href="https://ua.patents.su/6-30032-sposib-viznachennya-oriehntaci-osi-sverdlovini.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації осі свердловини</a>
Спосіб визначення напрямку орієнтації оптичної осі оптично-анізотропних полярних одновісних кристалів
Номер патенту: 25657
Опубліковано: 30.10.1998
Автори: Пасічник Юрій Архипович, Мельничук Олександр Володимирович, Венгер Євген Федорович
МПК: G01N 21/17
Мітки: напрямку, оптично-анізотропних, кристалів, визначення, орієнтації, спосіб, полярних, оптично, осі, одновісних
Формула / Реферат:
Спосіб визначення напрямку орієнтації оптичної осі оптично-анізотропних полярних одновісних кристалів, який полягає в тому, що на плоску поверхню монокристала направляють пучок лінійно-поляризованого інфрачервоного випромінювання, реєструють коефіцієнт відбивання відбитого від плоскої поверхні випромінювання, який відрізняється тим, що направляють пучок випромінювання з області залишкових променів оптично-анізотропного одновісного полярного...
Пристрій визначення орієнтації осі візира
Номер патенту: 30199
Опубліковано: 15.11.2000
Автори: Черняк Сергій Іванович, Полєжаєв Віктор Вікторович, Плита Олександр Андрійович, Беляєва Галина Григорівна
МПК: G02B 23/00
Мітки: осі, візира, орієнтації, пристрій, визначення
Формула / Реферат:
Пристрій визначення орієнтації осі візира, що містить візир, встановлений на рухомій основі, наприклад, на захисному шоломі оператора, складений із освітлювача, марки (сітки), об'єктиву та нахиленої плоскопаралельної пластини, який відрізняється тим, що до нього введено блок вимірювання параметрів розвороту, блок завдання початку відліку, запам'ятовуючий пристрій, суматор та інтегратор, а до візиру додатково встановлено у фокальній поверхні...
Система визначення орієнтації штучного супутника землі
Номер патенту: 21768
Опубліковано: 30.04.1998
Автори: П'ятак Ігор Авдійович, Салтиков Юрій Дмитрович
МПК: G01C 21/24, G01S 5/02
Мітки: орієнтації, визначення, супутника, штучного, землі, система
Формула / Реферат:
1. Система определения ориентации искусственного спутника Земли, состоящая из гироскопического блока измерителя угловой скорости спутника, вычислительного устройства и радиопеленгатора, включающего радиопеленгационный блок с антенной системой, отличающаяся тем, что в состав радиопеленгатора входят обзорное радиоприемное устройство и блок фиксации частоты принимаемого сигнала.2. Система определения ориентации, выполненная в...
Спосіб визначення скривлення бурової свердловини
Номер патенту: 9985
Опубліковано: 30.09.1996
Автори: Деглін Борис Мойсейович, Іванов Валентин Серафимович, Розенталь Мойсей Борисович
МПК: E21B 47/02
Мітки: скривлення, свердловини, спосіб, визначення, бурової
Формула / Реферат:
(57) 1. Способ определения искривления буровой скважины, включающий установление сейсмоприемников на устье скважины напротив друг друга на одинаковом расстоянии от устья, измерение сейсмоприемниками упругих волн, возникающих при работе породоразрушающего инструмента, и определение координат забоя скважины по результатам измерений, отличающийся тем, что устанавливают дополнительные сейсмоприемники возле заданной точки выхода скважины,...
Спосіб визначення орієнтації осі легкого намагнічування в магнітооптичних плівках з площинною анізотропією
Номер патенту: 20302
Опубліковано: 15.07.1997
Автори: Прокопов Анатолій Романович, Дубінко Сергій Володимирович, Грошенко Микола Олександрович, Кудряшов Олександр Леонідович, Недвига Олександр Степанович, Вишневський Віктор Георгійович, Вілесов Юрій Федотович
МПК: G02F 1/01
Мітки: магнітооптичних, намагнічування, анізотропією, орієнтації, осі, площинною, спосіб, визначення, плівках, легкого
Формула / Реферат:
Способ определения ориентации оси легкого намагничивания в магнитооптических пленках с плоскостной анизотропией, заключающийся в воздействии на магнитооптическую пленку полями рассеяния магнитной ленты с сигналограммой для наведения в пленке структуры намагниченности, аналогичной сигналограмме на магнитной ленте, освещении пленки поляризованным лазерным светом под углом полного внутреннего отражения для получения дифракции света на...
Попередній патент: Інтегральна матриця теплового приймача
Наступний патент: Спосіб електрохімічної обробки біполярними імпульсами, пристрій для його здійснення та джерело живлення для використання в способі
Випадковий патент: Гакова підвіска вантажопідйомних машин