Спосіб настроювання інклінометра
Номер патенту: 3265
Опубліковано: 15.11.2004
Автори: Шаров Сергій Анатолієвич, Прушко Віктор Романович, Смирнов Сергій Ратмирович, Яцун Леонід Васильович, Кротов Вадим Володимирович, Горащенко Наталія Володимирівна

Формула / Реферат
Спосіб настроювання інклінометра, що включає встановлення інклінометра уздовж заданих напрямків у робочому діапазоні температур, визначення параметрів невиставлення осей чутливості первинних вимірників, вимірювання проекцій в осях чутливості первинних вимірників, обчислення проекцій в осях системи координат інклінометра, який відрізняється тим, що інклінометр віссю симетрії встановлюють уздовж довільних, але заздалегідь вибраних напрямків, число яких не менше двох, і послідовно задають вимірювальні положення шляхом обертання приладу навколо осі симетрії на фіксовані кути з числом різних значень кутів повороту не менше двох на кожному напрямку, параметри ж невиставлення осей чутливості визначають разом з каліброваними параметрами чутливих елементів і параметрами впливу магнітних полів-перешкод і взаємного впливу первинних вимірників магнітного поля, встановлюють послідовно інклінометр віссю симетрії уздовж довільно заданих двох напрямків, визначають зміну розрахункових значень в осях системи координат інклінометра в робочому діапазоні температур, а проекції ![]() вектора прискорення сили тяжіння і вектора напруженості магнітного поля обчислюють в осях системи координат інклінометра по вимірах
вектора прискорення сили тяжіння і вектора напруженості магнітного поля обчислюють в осях системи координат інклінометра по вимірах ![]() в осях чутливості первинних вимірників і температури
в осях чутливості первинних вимірників і температури ![]() усередині інклінометра
усередині інклінометра
![]()
де:
![]() - масштабний коефіцієнт і постійна складова розрахункових значень для поточної температури,
- масштабний коефіцієнт і постійна складова розрахункових значень для поточної температури,
![]() ,
,
де:
![]() - параметри, знайдені при температурі настроювання інклінометра.
- параметри, знайдені при температурі настроювання інклінометра.
Текст
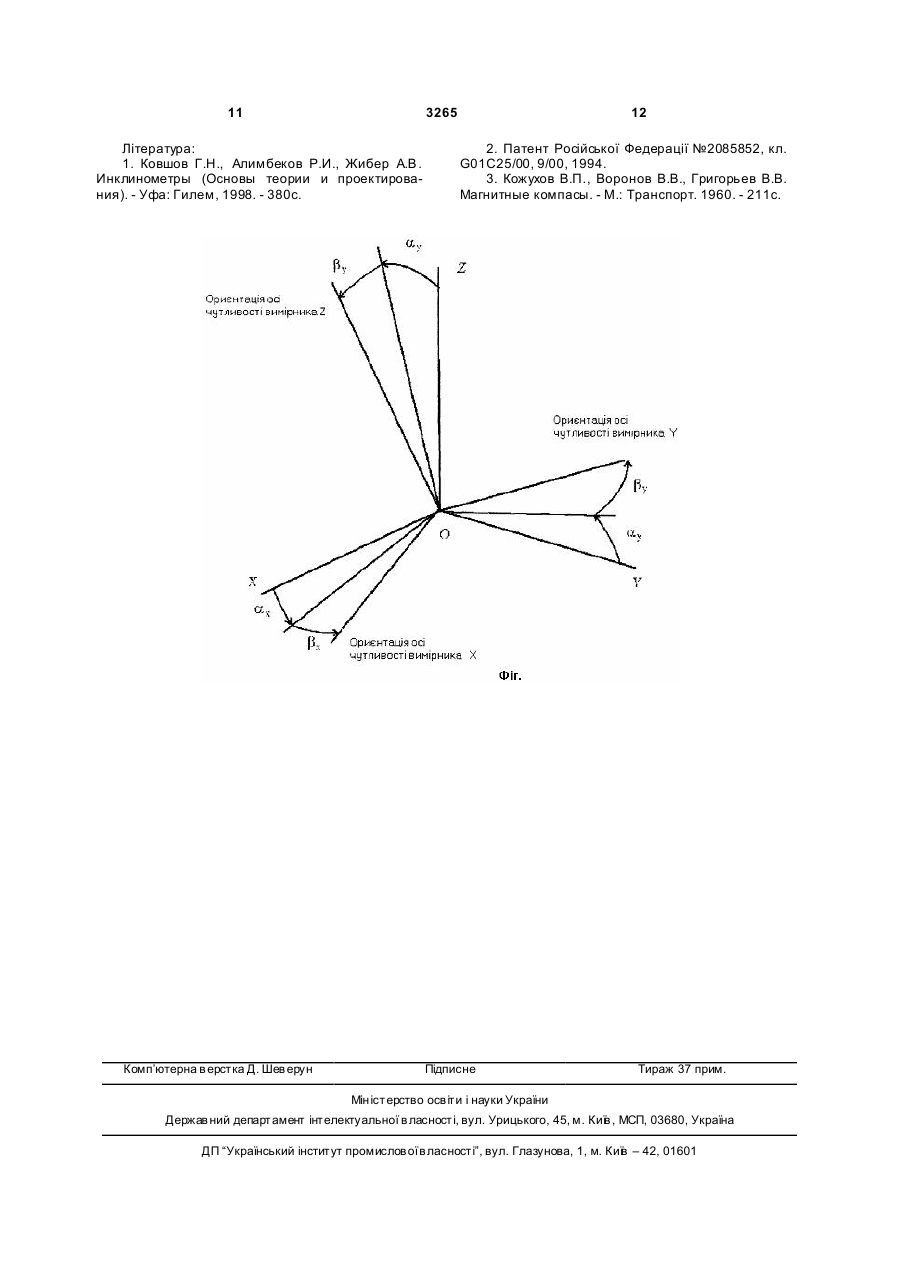
Спосіб настроювання інклінометра, що включає встановлення інклінометра уздовж заданих напрямків у робочому діапазоні температур, визначення параметрів невиставлення осей чутливості первинних вимірників, вимірювання проекцій в осях чутливості первинних вимірників, обчислення проекцій в осях системи координат інклінометра, який відрізняється тим, що інклінометр віссю симетрії встановлюють уздовж довільних, але заздалегідь вибраних напрямків, число яких не менше дво х, і послідовно задають вимірювальні положення шляхом обертання приладу навколо осі симетрії на фіксовані кути з числом різних значень кутів повороту не менше двох на кожному напрямку, параметри ж невиставлення осей чутливості 3 3265 4 №2085852, кл. G01С25/00, 9/00, 1997 [2], відповідтемператур, визначення параметрів невиставленно до якого виконують послідовне установлення ня осей чутливості первинних вимірників, вимір кожної осі системи координат, пов'язаної з інкліпроекцій в осях чутли вості первинних вимірників, нометром, спочатку уздовж одного вимірюваного обчислення проекції в осях системи координат вектора, а потім уздовж другого вимірюваного векінклінометра, а також припускає проведення додатора, визначають параметри невиставлення осей ткових операцій у порівнянні з прототипом, а саме: чутливості первинних вимірників, вимірюють прое1) інклінометр віссю симетрії встановлюють узкції в осях чутливості первинних вимірників, обчидовж довільних, але заздалегідь обраних напрямслюють проекції в осях системи координат інкліків, число яких не менше двох, і послідовно заданометра з урахуванням виправлень, що усувають ють вимірювальні положення шляхом обертання похибки, викликані перекосами осей чутливості приладу навколо осі симетрії під фіксованими купервинних вимірників. тами з числом різних значень кутів повороту не Недоліком такого способу є обов'язкова наявменше двох на кожнім напрямку; 2) визначають ність попереднього калібрування осей чутливості параметри невиставлення осей чутливості разом з для усунення розходжень у коефіцієнтах передачі каліброваними параметрами чуттєви х елементів і первинних вимірників, попередньої додаткової параметрами впливу магнітних полів-перешкод і перевірки відсутності взаємного впливу (відсутвзаємного впливу первинних вимірників магнітного ність зв'язків, кореляцій) між вимірювальними осяполя; 3) інклінометр установлюють послідовно ми, неврахування постійних складових у вихідних віссю симетрії уздовж довільно заданих двох насигналах первинних вимірників (незалежних від прямків; 4) визначають зміну розрахункових знаорієнтації осі чутливості) і зміни коефіцієнтів печень в осях системи координат інклінометра в роредачі перетворювачів у робочому діапазоні бочому діапазоні температур; 5) обчислюють температур. проекції ui(i=x,y,z) вектора прискорення сили тяМета корисної моделі - спрощення процесу жіння, а також вектора напруженості магнітного настроювання і підвищення точності інклінометра поля в осях системи координат інклінометра по за рахунок усунення помилок у ви хідних сигналах, вимірах Ux, Uy, Uz в осях чутливості первинних викликаних: вимірників і температури t усередині інклінометра - нерівністю коефіцієнтів передачі і наявністю ui = K( t )~i + ui0 (t ) , u електричних нульових зміщень у ви хідних сигнаде K(t ) , ui0 (t ) - масштабний коефіцієнт і полах первинних вимірників; стійна складова розрахункових значень для пото- перекосами осей чутливості первинних вимічної температури, рників щодо осей системи координат інклінометра; ~ =k U +k U +k U +k , - дією постійних магнітних полів-перешкод в ui i1 x i2 y i3 z i0 зоні установлення перетворювачів магнітного де ki0 , k i1 , ki2 , ki3 - параметри, знайдені при поля; температурі настроювання інклінометра. - перехресними зв'язками між перетворювачаУ загальному вигляді вирази для проекцій ми магнітного поля; прискорення сили тяжіння і напруженості магнітно- зміною коефіцієнтів передачі і дрейфом нулів по каналах у робочому діапазоні температур ексго поля Землі у взаємно перпендикулярних осях інклінометра мають вигляд плуатації приладу. ~ Пропонований спосіб настроювання інкліномеéaxc ù é f11 f12 f13 ù é A x ù éax 0 ù тра припускає деякі умови: ê~ ú ê úê ú ê ú êayc ú = ê f21 f22 f23 ú ê A y ú + êay 0 ú, (1) - настроювання приладу виконується в примі~ ú êf êa щенні, де відсутні магнітні поля-перешкоди, а темûë û ë û ë zc û ë 31 f32 f33 ú ê Az ú êaz 0 ú пература в приміщенні вважається незмінною про~ ù ém é rxc 11 m12 m13 ù éRx ù é rx 0 ù тягом настроювання приладу; ê~ ú ê ryc ú = êm21 m22 m23ú êRy ú + ê ry 0 ú, (2) - температура в приміщенні, при якій виконуê úê ú ê ú ється настроювання приладу, входить у діапазон ê~ ú êm31 m32 m33 ú êRz ú ê rz0 ú ûë û ë û ë rzc û ë робочих температур інклінометра; ~ , ~ , ~ і ~ , ~ , ~ де компоненти a xc a yc azc rxc ryc rzc передбачається наявність похилоповоротного столу з можливістю установлення й проекції прискорення сили тяжіння і напруженості утримання інклінометра в будь-якому довільному магнітного поля Землі у взаємно перпендикуляркуті вертикалі й під апсидальним кутом; них осях системи координат oxc y cz c , зв'язаної з - точність задания кутів установлення приінклінометром, при температурі настроювання. ладу вища, ніж вимоги по точності виміру кутів Вони розраховуються по вихідних сигналах компоприладом; нентних датчиків прискорення A x , A y , A z , ком- у процесі нагрівання й охолодження інклінометра в робочому діапазоні температур прилад не понентних перетворювачів магнітного поля Rx , змінює свого просторового положення. Мета корисної моделі досягається тим, що Ry , Rz і поправках спосіб настроювання інклінометра на базі трикооfij(i, j = рдинатного вимірника прискорення сили тяжіння і = 1... 3... 3 ),a x0 , a y0, a z0 ,mij(i, j 1 ... 3), rx0 , ry0 , rz0 , трикоординатного вимірника напруженості магнітщо вра ховують реальні характеристики датчиків ного поля включає відомі операції, такі ж, як і в (нерівність коефіцієнтів передачі і наявність елекпрототипі, а саме: установлення інклінометра узтричних нульових зміщень у вихідних сигналах, довж заданих напрямків у робочому діапазоні перекоси осей чутливості первинних вимірників 5 3265 6 щодо корпусів і кріплень), геометричні похибки де їхньої установки в кутомірний модуль (перекоси é~ ù é m11 m12 m13 ù éRx ù é rx 0 ù rxc місць кріплення первинних вимірників щодо наê~ ú ê úê ú ê ú прямків системи координат інклінометра ê ryc ú = êm21 m22 m23ú êRy ú + ê ry 0 ú, ê~ ú êm31 m32 m33 ú êRz ú ê rz0 ú oxc y cz c ), вплив магнітних полів-перешкод на пеûë û ë û ë rzc û ë Обчислені значення компонентів використоретворювачі магнітного поля і взаємний вплив вуються для розрахунку кутів орієнтації свердломагнітних перетворювачів. вини чи приладу по відомих залежностях. З метою Значення проекцій прискорення сили тяжіння у контролю працездатності приладу і контролю віровзаємно перпендикулярних осях інклінометра гідності результатів виміру, паралельно з обчисoxc y cz c робочому діапазоні температур можна ленням кутів орієнтації наземним устаткуванням представити як обчислюються модулі векторів і кут між ними (маг0 0 ù é ~xc ù é ax0( t )ù a éaxc ù é k x (t ) нітний нахил - величина відома для району ексê ú êa ú = ê 0 плуатації) [1]. k y (t ) 0 ú ê ~yc ú + ê ay0( t )ú, (3) a ê yc ú ê ú ê ú Величина виправлень індивідуальна для êazc ú ê 0 ú ê ~zc ú ê az0( t )ú 0 k z ( t )û ë a û ë ë û ë û кожного приладу і визначається наступними де: факторами. é~xc ù é f11 f12 f13 ù é A x ù éax 0 ù Нехай система координат oxc y cz c , вісь ozc a ê~ ú ê якої спрямована по осі симетрії інклінометра, а дві ayc ú = ê f21 f22 f23 ú ê A y ú + êay 0 ú, ê úê ú ê ú інші лежать у площині, перпендикулярній до осі ê~ ú ê f31 f32 f33 ú ê Az ú êaz 0 ú ûë û ë û ë azc û ë симетрії, є базовою (будівельною) системою приa k x ( t ) , k y ( t ) , k z (t ) , ax0 (t ) , a y0 (t ) , az0( t ) ладу, по осях якої і повинні бути закріплені осі чутливості первинних вимірників; акселерометрів і коефіцієнти перетворення і нульові зміщення камагнітометрів. налів перетворення прискорення, що запам'ятоОскільки поворот датчика навколо осі чутливуються чи представляються аналітично як функції вості не приводить до спотворення сигналу, задатемператури. мо двома кутами a і b можливу орієнтацію осі Проекції напруженості магнітного поля Землі, чутливості кожного компонентного вимірника щодо що обчислюються по вимірах феромодуляційних перетворювачів (ферозондів) з відпаленими персистеми координат oxc y cz c . малоєвими осердями, практично не мають дрейфу На фігурі показана можлива орієнтація осей при дії температур (0...200°С) і не потребують кочутливості первинних вимірників щодо базової рекції. При вимірах напруженості магнітного поля системи координат, що враховує геометричні поперетворювачами, що мають дрейф вихідного грішності виготовлення посадкових місць під персигналу в діапазоні температур експлуатації, обвинні вимірники і невідповідність напрямку осей числення проводяться за аналогією з залежностящодо корпусів вимірників. Вирази для вихідних ми (3), а саме сигналів акселерометрів A x , A y , A z , що врахо0 0 ù é~ ù érx0(t )ù rxc érxc ù ékrx (t ) вують ці перекоси осей чутливості щодо базової ê ú êr ú = ê 0 kry( t) 0 ú ê~ ú + êry0(t )ú, (3’) системи координат, а також індивідуальність коеê yc ú ê ú ryc ê ú êrzc ú ê 0 0 krz(t )ú ê~ ú êrz0(t )ú фіцієнтів передачі Kax , Kay , Kaz і нульових сигë û ë û ë rzc û ë û налів A x0 , A y0 , Az0 , мають вигляд é A x ù éK ax 0 0 ù écos a ax cos bax sinbax êA ú = ê 0 K ay 0 úê - sinbay cos a ay cos b ay ê yú ê úê êA z ú ê 0 0 K az ú ê sinb az - sina az cos baz ë û ë ûë де axc , a yc , azc - проекції прискорення сили тяжіння, що діють по осях системи координат інклінометра oxc y cz c . é A x ù éK ax 0 0 ùé 1 êA ú = ê 0 K ay 0 ú ê - bay yú ê ê úê êA z ú ê 0 0 K az ú ê baz ë û ë ûë Система рівнянь вирішується відносно невідомих проекцій прискорення сили тяжіння по - sina ax cosb ax ù éaxc ù é A x0 ù sina ay cos bay ú êayc ú + ê A y0 ú úê ú ê ú cos aaz cos baz ú êazc ú ê A z0 ú ûë û ë û Оскільки на практиці кути a і b
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 9/00
Мітки: спосіб, інклінометра, настроювання
Код посилання
<a href="https://ua.patents.su/6-3265-sposib-nastroyuvannya-inklinometra.html" target="_blank" rel="follow" title="База патентів України">Спосіб настроювання інклінометра</a>
Спосіб настроювання пристрою вигинального волочіння
Номер патенту: 67939
Опубліковано: 15.07.2004
Автори: Яковлев Сергій Петрович, Черевко Віталій Володимирович, Савенко Олександр Степанович, Мамчіц Євген Карлович, Попенко Олександр Філіппович, Скороходов Віктор Васильович, Вулих Анатолій Юрійович, Ботюк Олег Миколайович
МПК: B21B 13/00
Мітки: пристрою, настроювання, вигинального, спосіб, волочіння
Формула / Реферат:
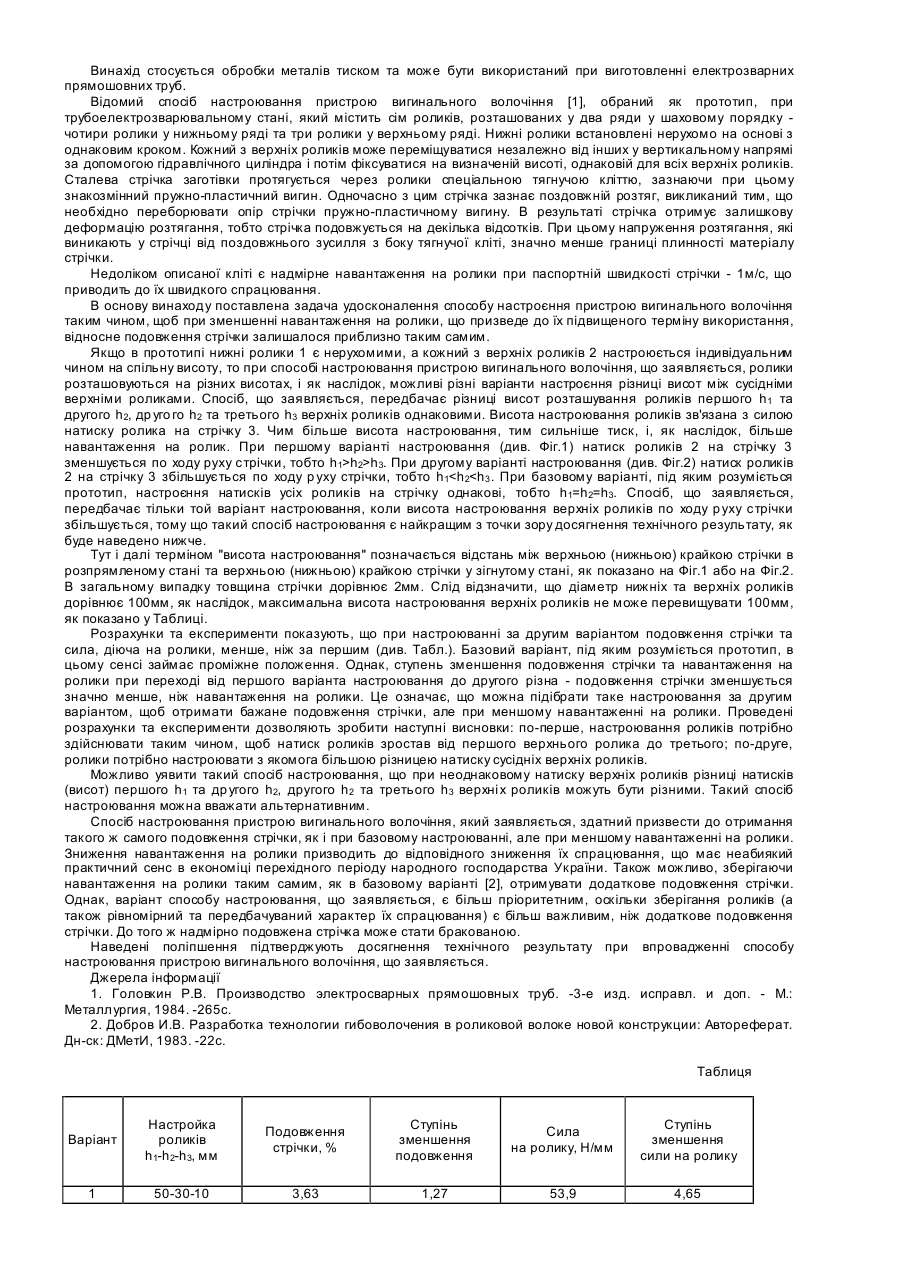
Спосіб настроювання пристрою вигинального волочіння, який містить сім роликів, розташованих у два ряди у шаховому порядку - чотири ролики у нижньому ряду і три ролики у верхньому ряду, причому нижні ролики встановлені нерухомо на основі з однаковим кроком, а кожний з верхніх роликів переміщується в вертикальному напрямку незалежно від інших та потім фіксується на визначеному, однаковому для всіх верхніх роликів, рівні по висоті, при цьому...
Спосіб настроювання вагових коефіцієнтів двошарового персептрона для рішення задач розпізнавання образів і діагностики
Номер патенту: 49380
Опубліковано: 16.09.2002
Автори: Дубровін Валерій Іванович, Внуков Юрій Миколайович, Жеманюк Павло Дмитрович, Субботін Сергій Олександрович
МПК: G06G 7/60
Мітки: настроювання, вагових, образів, коефіцієнтів, двошарового, діагностики, задач, персептрона, спосіб, розпізнавання, рішення
Формула / Реферат:
Спосіб настроювання вагових коефіцієнтів двошарового персептрона для рішення задач розпізнавання образів і діагностики, який полягає в тому, що класифікацію об’єктів за ознаками здійснюють на основі двошарового персептрона, який перетворює вхідну інформацію у бінарний номер класу екземпляра, який відрізняється тим, що ваги двошарового персептрона настроюють автоматично у безітераційному режимі, для чого здійснюють одномірну класифікацію...
Спосіб настроювання вагових коефіцієнтів тришарового персептрона для вирішення задач розпізнавання образів і діагностики
Номер патенту: 47881
Опубліковано: 15.07.2002
Автори: Лук'янов Валентин Семенович, Субботін Сергій Олександрович, Дубровін Валерій Іванович
МПК: G06G 7/60
Мітки: розпізнавання, персептрона, настроювання, коефіцієнтів, вагових, тришарового, спосіб, образів, вирішення, діагностики, задач
Формула / Реферат:
Спосіб настроювання вагових коефіцієнтів тришарового персептрона для вирішення задач розпізнавання образів і діагностики, який полягає у тому, що класифікацію об'єктів за ознаками роблять на основі тришарового персептрона, що перетворює вхідну інформацію у бінарний номер класу екземпляра, який відрізняється тим, що ваги тришарового персептрона настроюють автоматично у безітераційному режимі на основі інформації, що характеризує поділ об'єктів...
Спосіб настроювання теплової компенсації термостату
Номер патенту: 6365
Опубліковано: 29.12.1994
Автори: Дейнега Віктор Тимофєєвич, Ленська Ліна Петрівна, Бурбан Марк Наумович, Грабой Лев Пінкусович
МПК: G05D 23/30
Мітки: теплової, спосіб, компенсації, термостату, настроювання
Формула / Реферат:
Способ настройки тепловой компенсации термостата, заключающийся в изменении мощности, выделяемой в компенсационном исполнительном элементе, путем изменения величины регулируемого компенсационного сопротивления, отличающийся тем, что, с целью упрощения процесса настройки, изменение величины регулируемого компенсационного сопротивления ведут до момента достижения режима тепловыделения в компенсационном исполнительном органе, при котором...
Пристрій полуавтоматичного настроювання коксів
Номер патенту: 64068
Опубліковано: 16.02.2004
Автор: Базалій Валентин Петрович
МПК: B63B 9/00
Мітки: настроювання, полуавтоматичного, коксів, пристрій
Формула / Реферат:
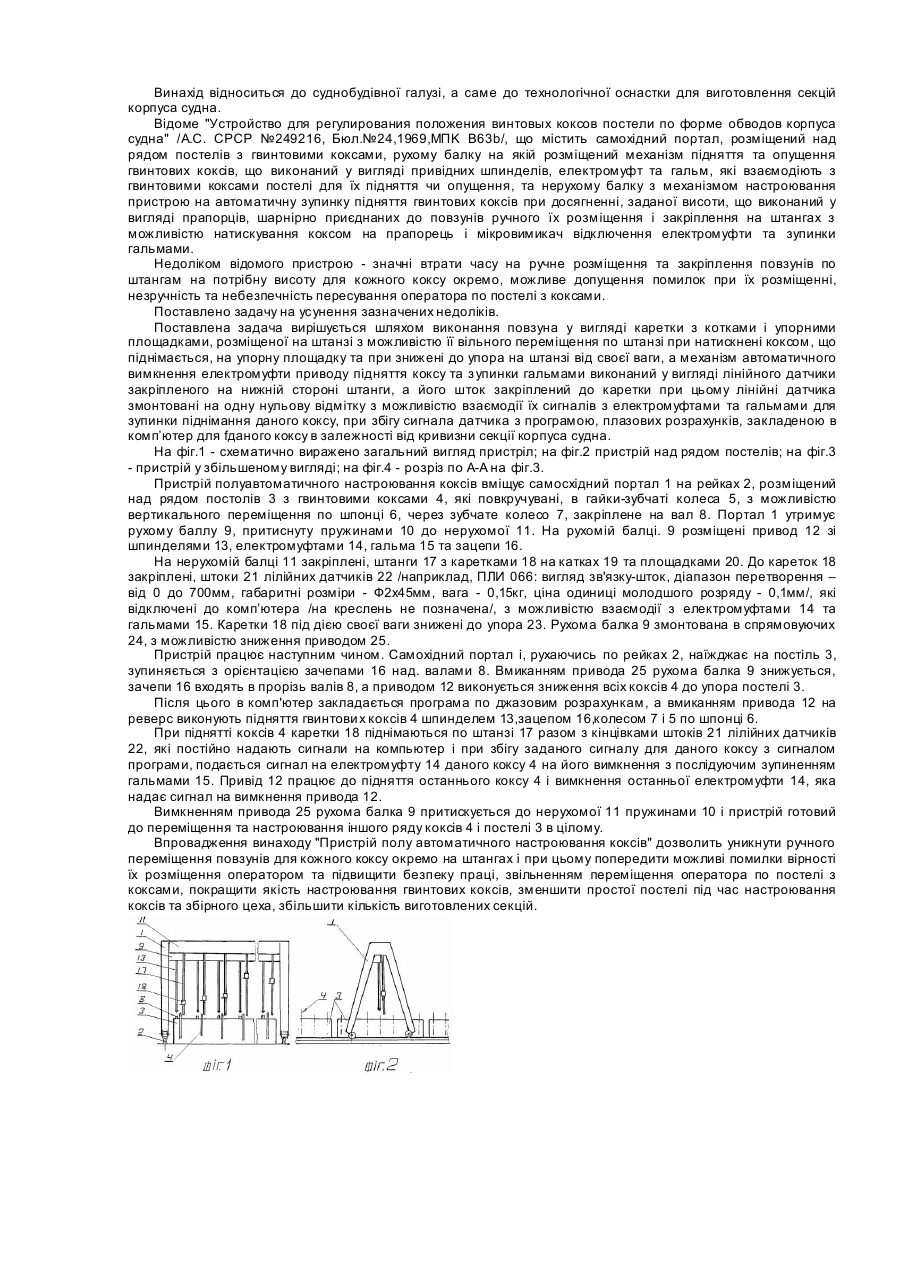
1. Пристрій полуавтоматичного настроювання коксів, що містить самохідний портал, розміщений над рядом постель з гвинтовими коксами, рухому балку з механізмом підняття чи опущення гвинтових коксів, що виконаний у вигляді привідних шпинделів, електромуфт та гальм, які взаємодіють з гвинтовими коксами постелі для їх підняття, та нерухому балку з механізмом настроювання пристрою на автоматичну зупинку підняття гвинтових коксів при досягненні...
Попередній патент: Кобальтоксидний каталізатор для процесу селективного відновлення оксидів азоту метаном
Наступний патент: Пристрій для фільтрації текучого середовища
Випадковий патент: Фільтр