Спосіб циклічної синхронізації рухомих об’єктів


Текст
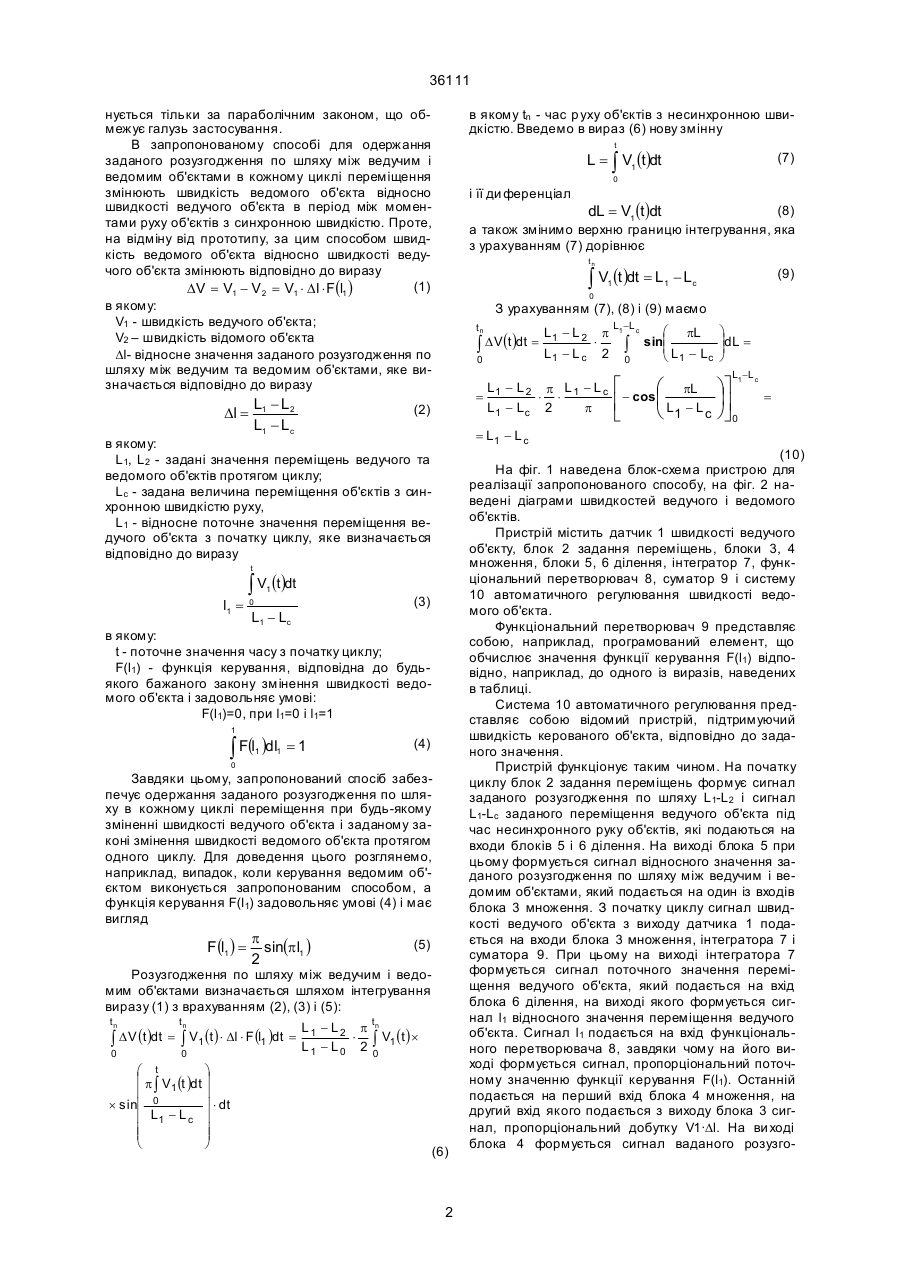
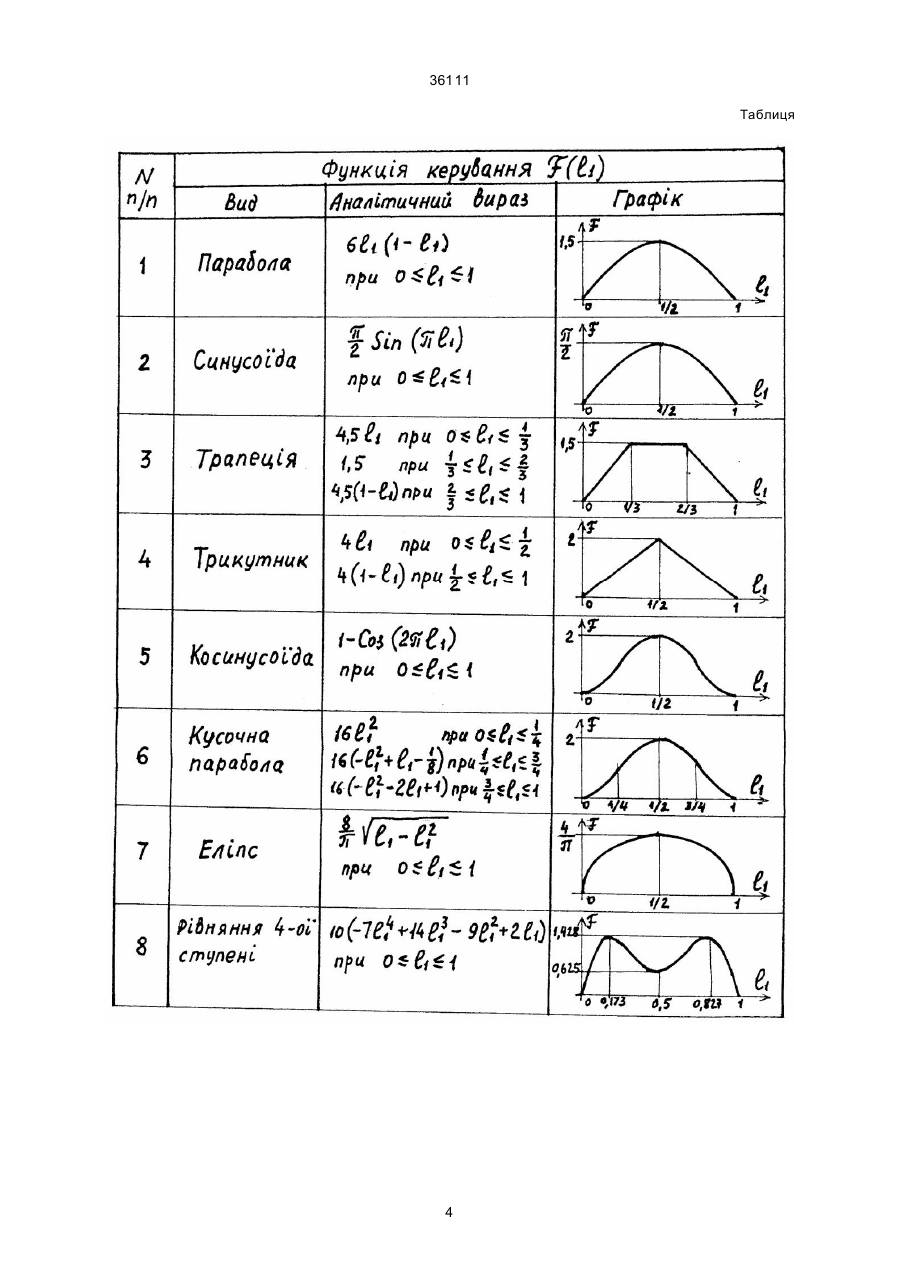
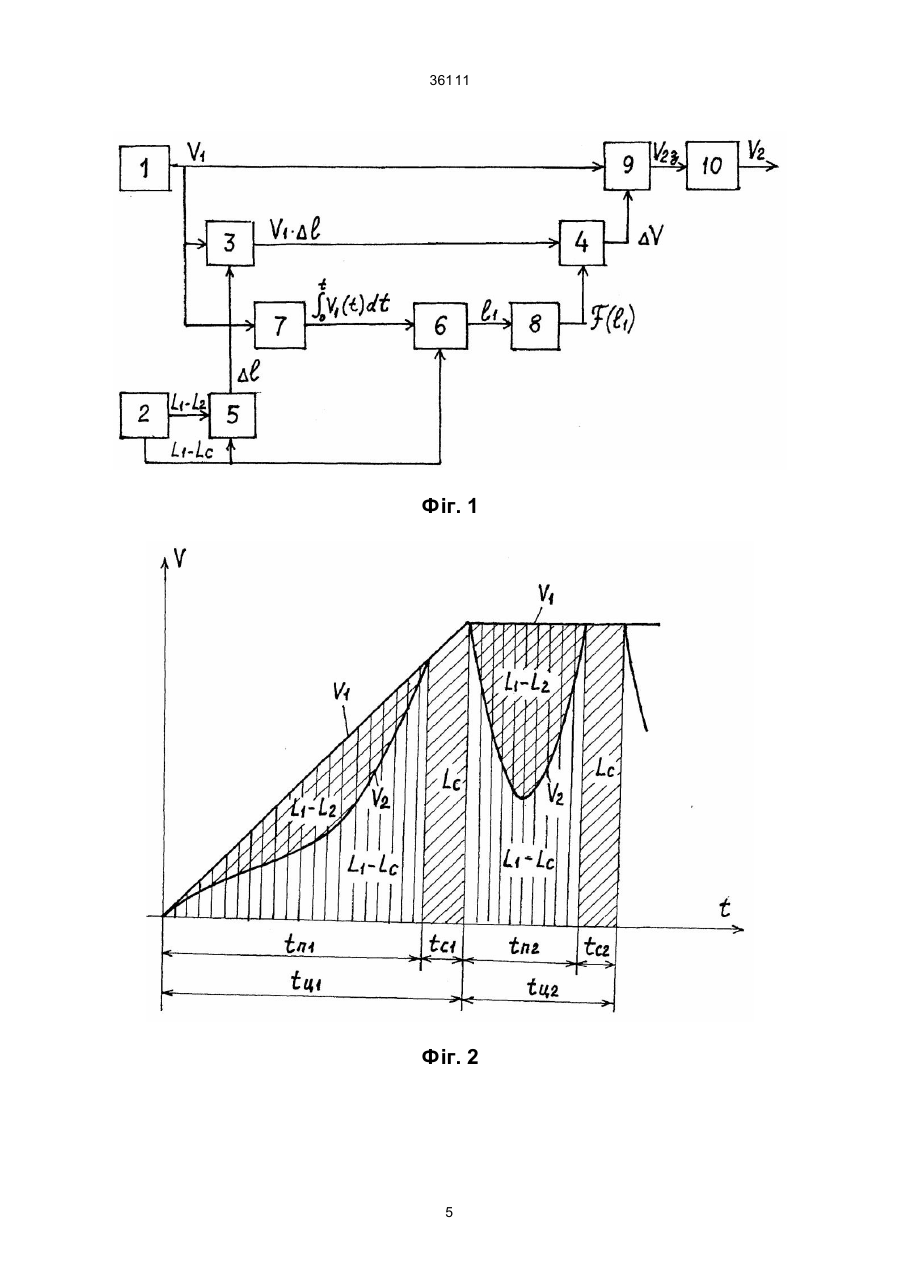
Спосіб циклічної синхронізації рухомих об'єктів, за яким для одержання заданого розузгодження по шляху між ведучим і ведомим об'єктами в кожному циклі переміщення змінюють швидкість ведомого об'єкта по відношенню до швидкості ведучого об'єкта в період між ділянками руху об'єктів з синхронною швидкістю, який відрізняється тим, що швидкість ведомого об'єкта по відношенню до швидкості ведучого об'єкта змінюють на величину, яка визначається відповідно до виразу 36111 нується тільки за параболічним законом, що обмежує галузь застосування. В запропонованому способі для одержання заданого розузгодження по шляху між ведучим і ведомим об'єктами в кожному циклі переміщення змінюють швидкість ведомого об'єкта відносно швидкості ведучого об'єкта в період між моментами руху об'єктів з синхронною швидкістю. Проте, на відміну від прототипу, за цим способом швидкість ведомого об'єкта відносно швидкості ведучого об'єкта змінюють відповідно до виразу (1) DV = V1 - V 2 = V1 × Dl × F(l1 ) в якому: V1 - швидкість ведучого об'єкта; V2 – швидкість відомого об'єкта Dl- відносне значення заданого розузгодження по шляху між ведучим та ведомим об'єктами, яке визначається відповідно до виразу L1 - L 2 L1 - L c Dl = в якому tn - час р уху об'єктів з несинхронною швидкістю. Введемо в вираз (6) нову змінну t L = ò V1 (t)dt 0 і її ди ференціал (8) dL = V1 (t)dt а також змінимо верхню границю інтегрування, яка з урахуванням (7) дорівнює tn ò V (t )dt = L 1 ò D V(t )dt = 0 1 в якому: t - поточне значення часу з початку циклу; F(l1) - функція керування, відповідна до будьякого бажаного закону змінення швидкості ведомого об'єкта і задовольняє умові: F(l1)=0, при l1=0 і l1=1 1 ò F(l )dl 1 1 (4) =1 0 Завдяки цьому, запропонований спосіб забезпечує одержання заданого розузгодження по шляху в кожному циклі переміщення при будь-якому зміненні швидкості ведучого об'єкта і заданому законі змінення швидкості ведомого об'єкта протягом одного циклу. Для доведення цього розглянемо, наприклад, випадок, коли керування ведомим об'єктом виконується запропонованим способом, а функція керування F(l1) задовольняє умові (4) і має вигляд F (l1 ) = p sin(p l1 ) 2 (5) Розузгодження по шляху між ведучим і ведомим об'єктами визначається шляхом інтегрування виразу (1) з врахуванням (2), (3) і (5): tn ò D V (t )dt 0 = tn ò V1 (t ) × Dl × F (l1 )dt 0 æ t ö ç p V (t )dt ÷ ò 1 ç ÷ ´ sinç 0 ÷ × dt ç L1 - L c ÷ ç ÷ ç ÷ è ø = L1 - L2 p × L1 - L0 2 L1-L c ò 0 æ pL sinç çL - L è 1 c é - cosæ pL çL -L ê è 1 c ë ö ÷dL = ÷ ø L1-L c öù ÷ú øû 0 = = L1 - L c (3) L1 - Lc L1 - L 2 p × L1 - L c 2 L - L2 p L1 - Lc = 1 × × L1 - Lc 2 p t 0 (9) - Lc З урахуванням (7), (8) і (9) маємо tn в якому: L1, L2 - задані значення переміщень ведучого та ведомого об'єктів протягом циклу; Lc - задана величина переміщення об'єктів з синхронною швидкістю руху, L1 - відносне поточне значення переміщення ведучого об'єкта з початку циклу, яке визначається відповідно до виразу l1 = 1 0 (2) ò V (t)dt (7) tn ò V1 (t ) ´ 0 (6) 2 (10) На фіг. 1 наведена блок-схема пристрою для реалізації запропонованого способу, на фіг. 2 наведені діаграми швидкостей ведучого і ведомого об'єктів. Пристрій містить датчик 1 швидкості ведучого об'єкту, блок 2 задання переміщень, блоки 3, 4 множення, блоки 5, 6 ділення, інтегратор 7, функціональний перетворювач 8, суматор 9 і систему 10 автоматичного регулювання швидкості ведомого об'єкта. Функціональний перетворювач 9 представляє собою, наприклад, програмований елемент, що обчислює значення функції керування F(l1) відповідно, наприклад, до одного із виразів, наведених в таблиці. Система 10 автоматичного регулювання представляє собою відомий пристрій, підтримуючий швидкість керованого об'єкта, відповідно до заданого значення. Пристрій функціонує таким чином. На початку циклу блок 2 задання переміщень формує сигнал заданого розузгодження по шляху L1-L2 і сигнал L1-Lc заданого переміщення ведучого об'єкта під час несинхронного руку об'єктів, які подаються на входи блоків 5 і 6 ділення. На виході блока 5 при цьому формується сигнал відносного значення заданого розузгодження по шляху між ведучим і ведомим об'єктами, який подається на один із входів блока 3 множення. З початку циклу сигнал швидкості ведучого об'єкта з виходу датчика 1 подається на входи блока 3 множення, інтегратора 7 і суматора 9. При цьому на виході інтегратора 7 формується сигнал поточного значення переміщення ведучого об'єкта, який подається на вхід блока 6 ділення, на виході якого формується сигнал l1 відносного значення переміщення ведучого об'єкта. Сигнал l1 подається на вхід функціонального перетворювача 8, завдяки чому на його виході формується сигнал, пропорціональний поточному значенню функції керування F(l1). Останній подається на перший вхід блока 4 множення, на другий вхід якого подається з виходу блока 3 сигнал, пропорціональний добутку V1·Dl. На ви ході блока 4 формується сигнал ваданого розузго 36111 дження по швидкості DV згідно з виразом (1). Цей сигнал подається на другий вхід суматора 9, на виході якого формується сигнал V2з=V1-DV задання швидкості ведомого об'єкта. Завдяки дії цього сигналу, система 10 керує швидкістю ведомого об'єкта, підтримуючи її на заданому рівні. При цьому швидкість ведомого об'єкта змінюється згідно з виразом (1) і протягом часу tn розузгодження по шляху L1-L2 досягає заданої величини. Після закінчення відрізку часу tn сигнал DV становиться рівним нулю, а на виході суматора 9 сигнал V2з дорівнює сигналу V1. При цьому системою 10 швидкість V2 ведомого об'єкта підтримується однакова з швидкістю ведучого об'єкта і протягом часу tс рух об'єктів виконується з синхронною швидкістю на заданому відрізку шля ху Lс. Як видно з опису пристрою, який реалізує запропонований спосіб, його структура не залежить від того, за яким законом виконується зміна швидкості ведомого об'єкта, що суттєво спрощує пристрій і розширяє галузь застосування способу. Технічним результатом застосування запропонованого способу циклічної синхронізації рухомих об'єктів є надання змоги синтезувати будьякий закон керування ведомим об'єктом, зумовлений технологічними, енергосиловими, конструкторськими та іншими вимогами. Для побудови пристрою, який реалізує даний спосіб, можливо використати технічні засоби, які виробляються сучасною промисловістю. 3 36111 Таблиця 4 36111 Фіг. 1 Фіг. 2 5 36111 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of cyclic synchronization of moving objects
Автори англійськоюKholodnyi Valerii Ivanovych
Назва патенту російськоюСпособ циклической синхронизации подвижных объектов
Автори російськоюХолодный Валерий Иванович
МПК / Мітки
МПК: B23D 25/00
Мітки: рухомих, об'єктів, спосіб, циклічної, синхронізації
Код посилання
<a href="https://ua.patents.su/6-36111-sposib-ciklichno-sinkhronizaci-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб циклічної синхронізації рухомих об’єктів</a>
Спосіб регулювання положення електроприводу
Номер патенту: 28979
Опубліковано: 16.10.2000
Автори: Холодний Валерій Іванович, Поліванов Валентин Олексійович
МПК: G05B 19/18
Мітки: регулювання, положення, електроприводу, спосіб
Формула / Реферат:
Спосіб регулювання положення електроприводу, за яким вимірюють його фактичне положення та розузгодження по шляху і в залежності від величини цього розузгодження змінюють швидкість електроприводу таким чином, щоб величини прискорення та швидкості не перевищували максимальних значень, а в момент зупинення електроприводу розузгодження по шляху мало нульове значення, який відрізняється тим, що швидкість електроприводу під час розгону та...
Спосіб та пристрій для вібраційної діагностики машин циклічної дії

Номер патенту: 34523
Опубліковано: 15.03.2001
Автори: Єгер Дмитро Олександрович, Яценко Олег Володимирович, Бугай Юрій Миколайович, Литвин Володимир Михайлович, Малев Валерій Іванович, Зарубін Юрій Олександрович, Фреюк Тарас Михайлович, Немчин Олександр Федорович, Бакай Ігор Михайлович, Ковалко Михайло Петрович, Чернишов Віктор Григорович, Рибчич Ілля Йосипович, Артемов Володимир Іванович, Гончарук Володимир Якович
МПК: G01M 7/00
Мітки: циклічної, вібраційної, машин, діагностики, дії, спосіб, пристрій
Текст:
...хід якого зв'я заний із блоком 6 обчислення наступної за лежності : Уд - дійсний рівень амплітуди вібрації в місці виміру; Ум - максимальний рівень амплітуди вібрації в місці виміру. Один із входів блока 6 обчислення з'єднаний із блоком 3 пам'яті для збереження максимальних значень амплітуд вібросигналів, а один із виходів блока 6 з'єднаний із входом дисплея 7. Пристрій працює наступним чином. У блоці 4 здійснюється вимір, реєстрація та...
Спосіб аналізу електродинамічних характеристик рухомих об’єктів складної форми
Номер патенту: 24561
Опубліковано: 04.08.1998
Автори: Кропачев Виктор Степанович, Говоров Валентін Сергійович, Краснов Леонід Михайлович, Сопін Микола Павлович
МПК: G01R 33/02
Мітки: рухомих, аналізу, спосіб, характеристик, об'єктів, форми, електродинамічних, складної
Формула / Реферат:
Способ анализа электродинамических характеристик подвижных объектов сложной формы, состоящий в облучении объекта непрерывным сигналом, приеме отраженных сигналов, проведении спектрального анализа отраженного сигнала, определении амплитуд и фаз экстремальных спектральных составляющих, вычислении на их основе относительной дальности и поперечных расстояний между локальными областями рассеяния, отличающийся тем, что дополнительно определяют...
Спосіб поколесного зважування рухомих об’єктів
Номер патенту: 22542
Опубліковано: 17.03.1998
Автор: Калінін Олександр Іванович
МПК: G01G 19/04
Мітки: рухомих, об'єктів, спосіб, поколесного, зважування
Формула / Реферат:
Способ поколесного взвешивания подвижных объектов, включающий установку на железнодорожном пути грузоприемного устройства, опирающегося на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов и суммирование результатов обработки, отличающийся тем, что длину платформы грузоприемного устройства с расположенными на ней рельсами устанавливают большей межосевого расстояния регистрируемых объектов,...
Спосіб вібраційної діагностики машини циклічної дії
Номер патенту: 29550
Опубліковано: 15.11.2000
Автори: Зарубін Юрій Олександрович, Фреюк Тарас Михайлович, Яценко Олег Володимирович, Єгер Дмитро Олександрович, Рибчич Ілля Йосипович, Немчин Олександр Федорович, Артемов Володимир Іванович, Чернишов Віктор Григорович, Бугай Юрій Миколайович, Малев Валерій Іванович, Ковалко Михайло Петрович, Бакай Ігор Михайлович, Гончарук Володимир Якович
МПК: G01M 7/02
Мітки: циклічної, діагностики, спосіб, машини, вібраційної, дії
Текст:
...(А.с. СРСР № 1 420 424, кл. G 01 M 7/00, 1985, публ. 1988). До недоліків способу варто віднести неточність діагностики за рахунок того, що даним способом також неможливо встановити, які з бічних складових несучої і її гармонік обумовлені дефектами власне маши ни, і, крім того, неточність діагности ки за рахунок порівняння непрямих значень показників. Причиною, що перешкоджає досягненню очікуваного технічного результату, є те, що...
Попередній патент: Пристрій для зашивання наповнених мішків
Наступний патент: Спосіб контролю вимірювальних схем з індуктивними датчиками переміщення
Випадковий патент: Спосіб формування пупка при грижопластиці з приводу пупкової грижі