Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі

Формула / Реферат
1. Спосіб пересування транспортного засобу у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс з встановленим колісно-кроковим рушієм, який складається з одного колісно-крокового важеля, складеного із двох шарнірно з'єднаних ланок, що містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців Z1 центрального колеса та Z3 периферійного сателіта: (Z1/Z3)>1, з приводом переміщення за типом кривошипно-повзунного механізму з пружним шатуном, що діє у фазі крокового руху на нижню ланку важеля рушія, забезпечуючи колісно-кроковий рух та зворот у вихідне положення у фазі переносу, який відрізняється тим, що центральне колесо Z1 приводу опорного колеса з'єднують зі своєю ведучою віссю за допомогою обгінної муфти, у приводі переміщення застосовують кривошипно-коромисловий механізм, причому його важіль з'єднують шарнірно з колісно-кроковим важелем проміжною ланкою, що забезпечує вільний рух його опорного колеса у фазі переносу.
2. Спосіб за п. 1, який відрізняється тим, що центральне колесо Z1 зубчастої передачі приводу опорного колеса колісно-крокового важеля встановлюють за допомогою обгінної муфти на нерухому відносно корпусу вісь, причому на швидкохідний ступінь приводу переміщення колісно-крокового важеля встановлюють маховик.
3. Спосіб за пп. 1, 2, який відрізняється тим, що рушій встановлюють на колісний транспортний засіб, причому для умови рівності лінійних швидкостей опорних коліс обох рушіїв вибирають швидкість опорного колеса колісно-крокового важеля у фазі крокового руху.
4. Спосіб за п. 3, який відрізняється тим, що для переїзду високих дорожніх перешкод та порогових транспортним засобом, положення центру ваги якого не визначено відносно поздовжньої осі, застосовують додатковий колісно-кроковий важіль, що містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців Z1/Z3>1, який встановлюють шарнірно на задню ведучу вісь колісного транспортного засобу.
5. Спосіб за п. 3, який відрізняється тим, що для переїзду одиночних дорожніх перешкод значної висоти у приводі переміщення колісно-крокового рушія застосовують муфту однооборотної дії, причому її важіль включення з'єднують із ланкою опорного колеса колісно-крокового важеля, рух якої в момент в'їзду на поверхню перешкоди автоматично вмикає муфту, що передає обертовий момент на кривошип приводу переміщення.
Текст
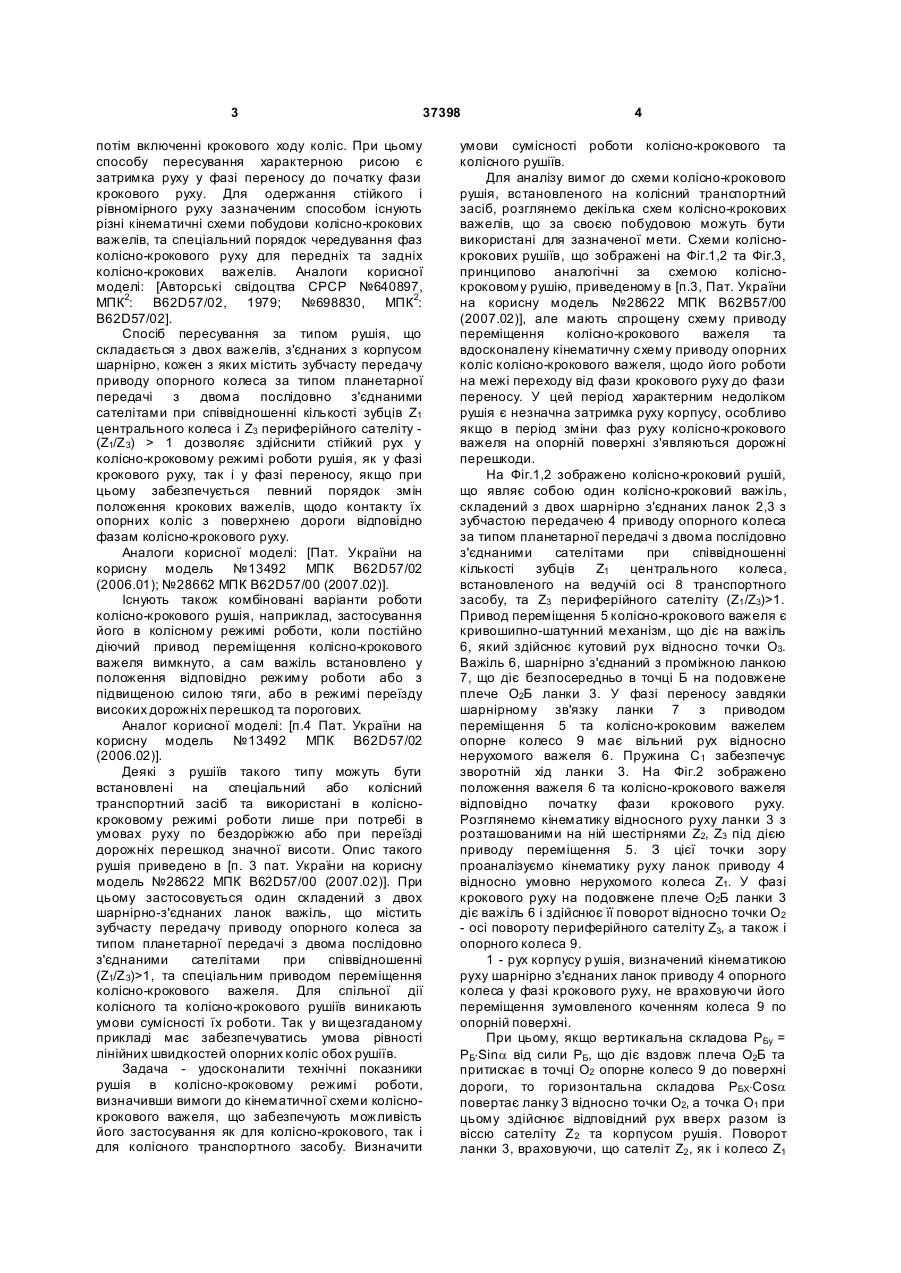
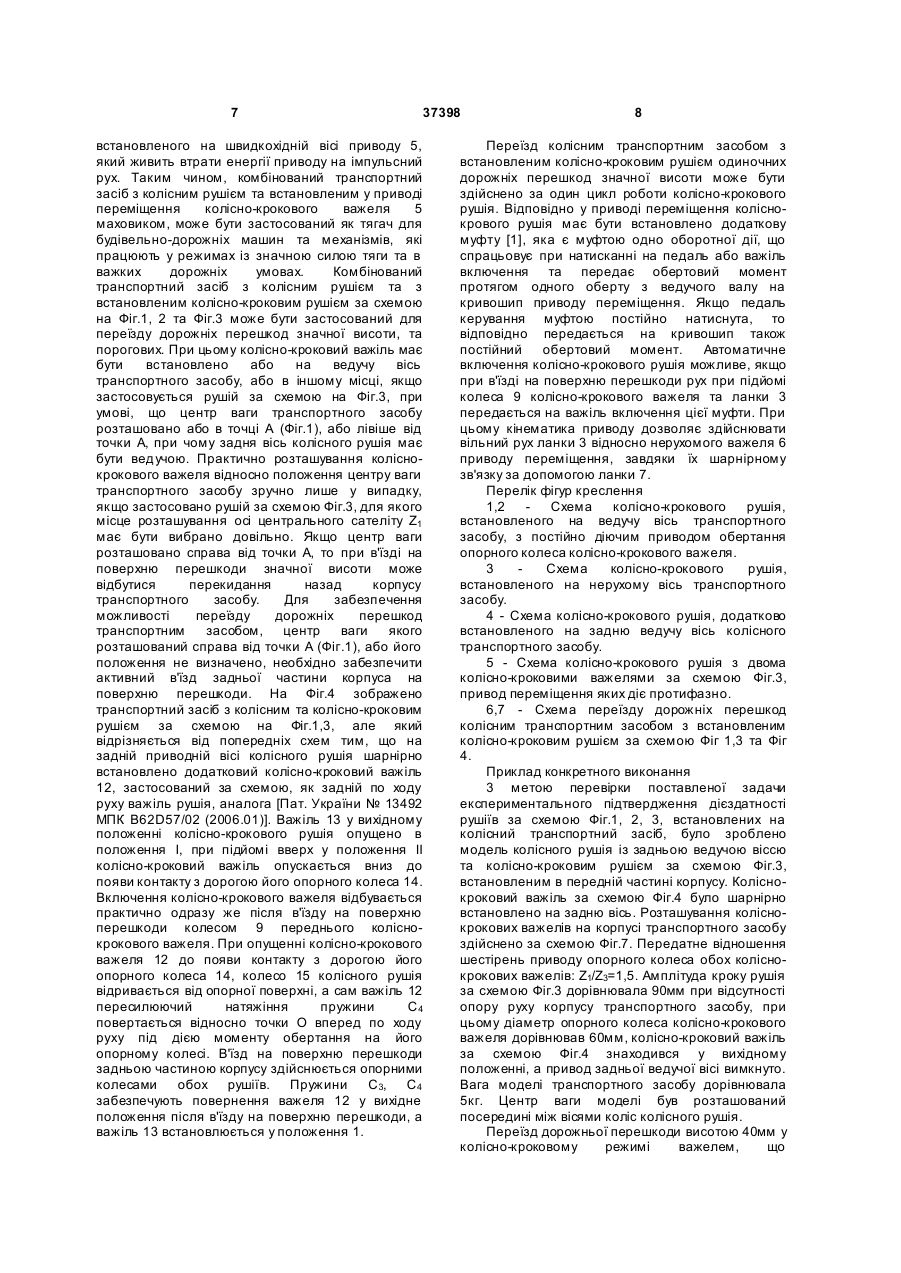
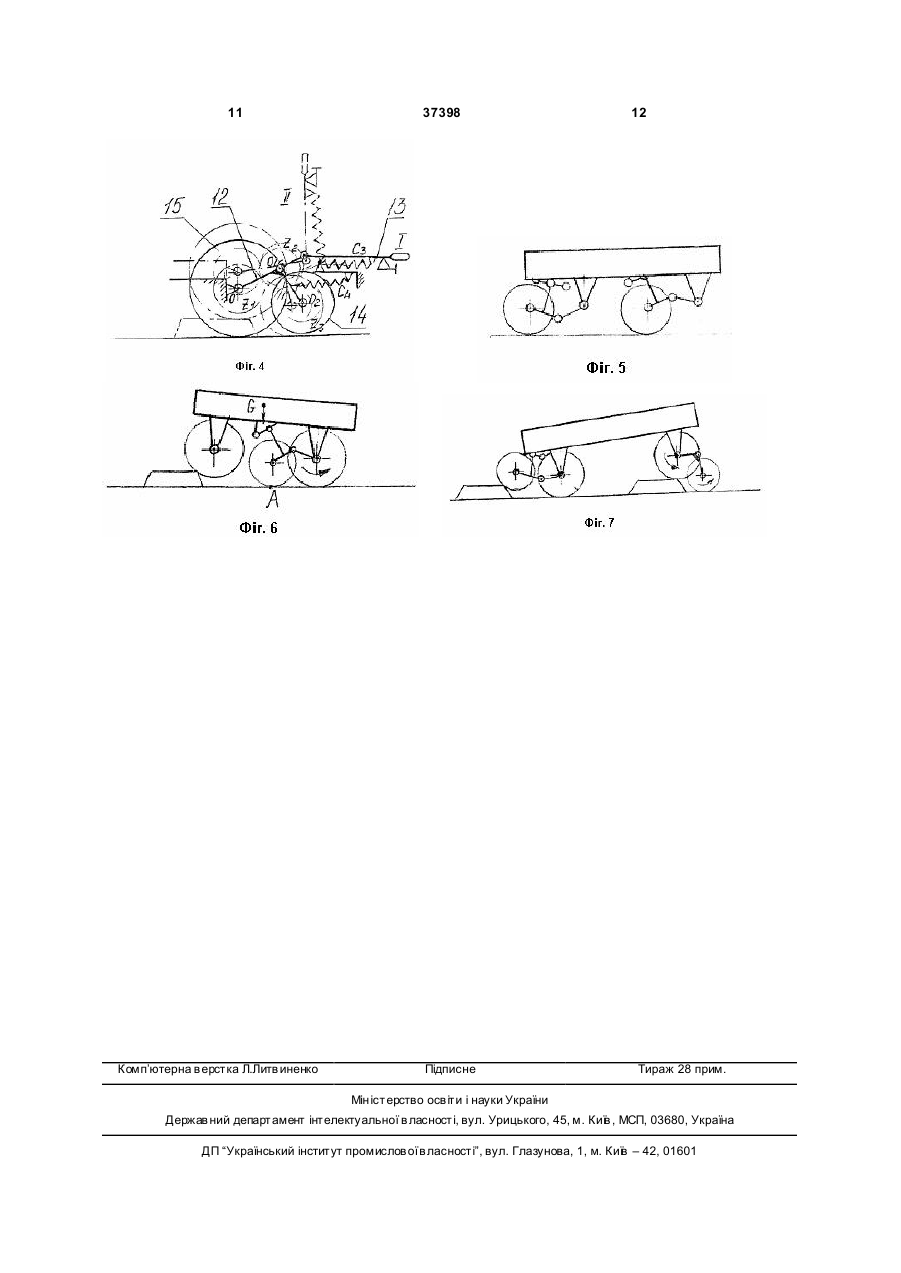
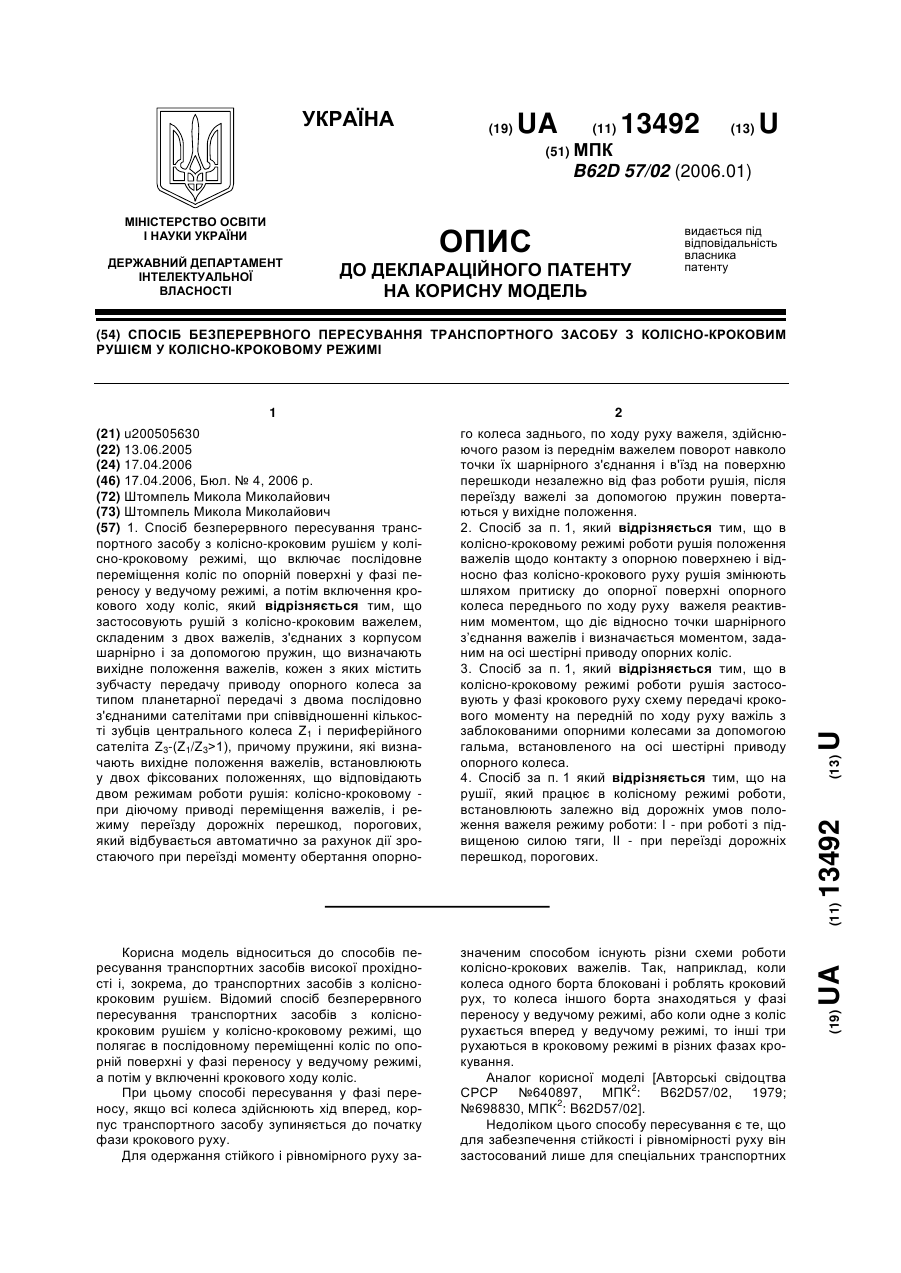
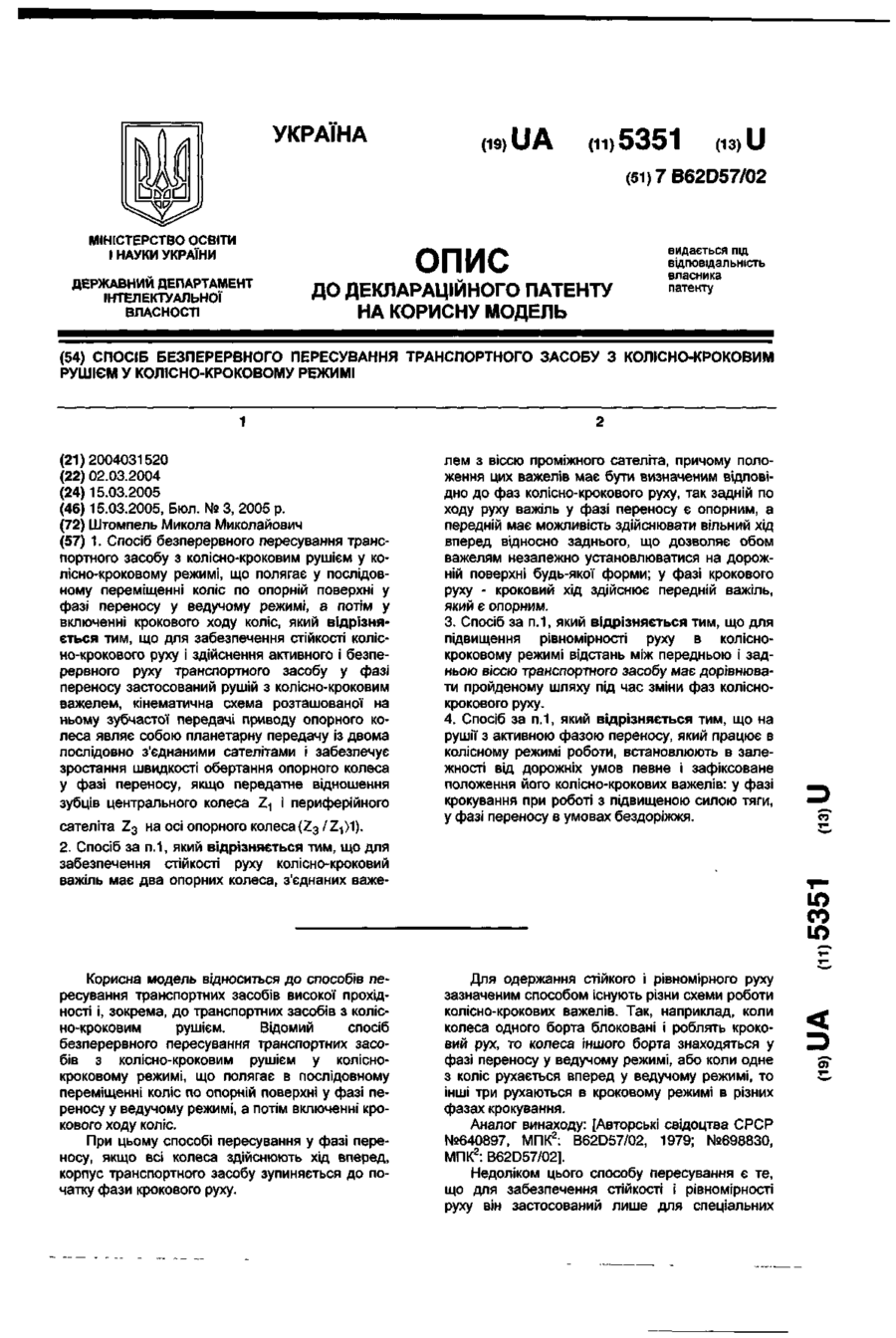
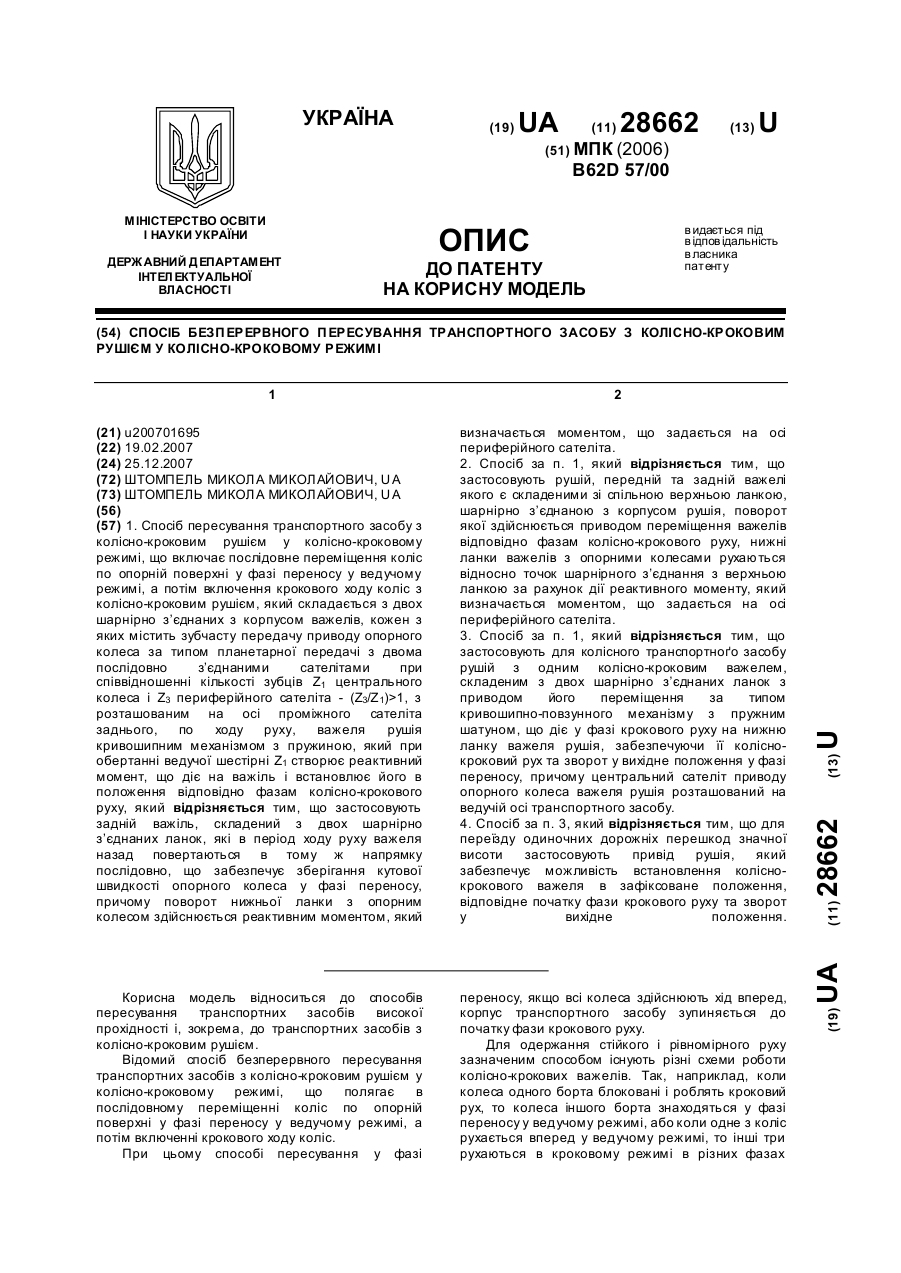
1. Спосіб пересування транспортного засобу у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс з встановленим колісно-кроковим рушієм, який складається з одного коліснокрокового важеля, складеного із двох шарнірно з'єднаних ланок, що містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців Z1 центрального колеса та Z3 периферійного сателіта: (Z1/Z3)>1, з приводом переміщення за типом кривошипно-повзунного механізму з пружним шатуном, що діє у фазі крокового руху на нижню ланку важеля рушія, забезпечуючи колісно-кроковий рух та зворот у вихідне положення у фазі переносу, який відрізняється тим, що центральне колесо Z1 приводу опорного колеса з'єднують зі своєю ведучою віссю за допомогою обгінної муфти, у приводі переміщення застосовують кривошипно-коромисловий механізм, причому його важіль з'єднують шарнірно з колісно-кроковим важелем проміжною ланкою, що забезпечує вільний рух його опорного колеса у фазі переносу. 2. Спосіб за п. 1, який відрізняється тим, що центральне колесо Z1 зубчастої передачі приводу U 2 (11) 1 3 37398 потім включенні крокового ходу коліс. При цьому способу пересування характерною рисою є затримка руху у фазі переносу до початку фази крокового руху. Для одержання стійкого і рівномірного руху зазначеним способом існують різні кінематичні схеми побудови колісно-крокових важелів, та спеціальний порядок чередування фаз колісно-крокового руху для передніх та задніх колісно-крокових важелів. Аналоги корисної моделі: [Авторські свідоцтва СРСР №640897, МПК2: B62D57/02, 1979; №698830, МПК2: B62D57/02]. Спосіб пересування за типом рушія, що складається з двох важелів, з'єднаних з корпусом шарнірно, кожен з яких містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців Z1 центрального колеса і Z3 периферійного сателіту (Z1/Z 3) > 1 дозволяє здійснити стійкий рух у колісно-кроковому режимі роботи рушія, як у фазі крокового руху, так і у фазі переносу, якщо при цьому забезпечується певний порядок змін положення крокових важелів, щодо контакту їх опорних коліс з поверхнею дороги відповідно фазам колісно-крокового руху. Аналоги корисної моделі: [Пат. України на корисну модель №13492 МПК B62D57/02 (2006.01); №28662 МПК B62D57/00 (2007.02)]. Існують також комбіновані варіанти роботи колісно-крокового рушія, наприклад, застосування його в колісному режимі роботи, коли постійно діючий привод переміщення колісно-крокового важеля вимкнуто, а сам важіль встановлено у положення відповідно режиму роботи або з підвищеною силою тяги, або в режимі переїзду високих дорожніх перешкод та порогових. Аналог корисної моделі: [п.4 Пат. України на корисну модель №13492 МПК B62D57/02 (2006.02)]. Деякі з рушіїв такого типу можуть бути встановлені на спеціальний або колісний транспортний засіб та використані в коліснокроковому режимі роботи лише при потребі в умовах руху по бездоріжжю або при переїзді дорожніх перешкод значної висоти. Опис такого рушія приведено в [п. 3 пат. України на корисну модель №28622 МПК B62D57/00 (2007.02)]. При цьому застосовується один складений з двох шарнірно-з'єднаних ланок важіль, що містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні (Z1/Z 3)>1, та спеціальним приводом переміщення колісно-крокового важеля. Для спільної дії колісного та колісно-крокового рушіїв виникають умови сумісності їх роботи. Так у ви щезгаданому прикладі має забезпечуватись умова рівності лінійних швидкостей опорних коліс обох рушіїв. Задача - удосконалити технічні показники рушія в колісно-кроковому режимі роботи, визначивши вимоги до кінематичної схеми коліснокрокового важеля, що забезпечують можливість його застосування як для колісно-крокового, так і для колісного транспортного засобу. Визначити 4 умови сумісності роботи колісно-крокового та колісного рушіїв. Для аналізу вимог до схеми колісно-крокового рушія, встановленого на колісний транспортний засіб, розглянемо декілька схем колісно-крокових важелів, що за своєю побудовою можуть бути використані для зазначеної мети. Схеми коліснокрокових рушіїв, що зображені на Фіг.1,2 та Фіг.3, принципово аналогічні за схемою коліснокроковому рушію, приведеному в [п.3, Пат. України на корисну модель №28622 МПК В62В57/00 (2007.02)], але мають спрощену схему приводу переміщення колісно-крокового важеля та вдосконалену кінематичну схему приводу опорних коліс колісно-крокового важеля, щодо його роботи на межі переходу від фази крокового руху до фази переносу. У цей період характерним недоліком рушія є незначна затримка руху корпусу, особливо якщо в період зміни фаз руху колісно-крокового важеля на опорній поверхні з'являються дорожні перешкоди. На Фіг.1,2 зображено колісно-кроковий рушій, що являє собою один колісно-кроковий важіль, складений з двох шарнірно з'єднаних ланок 2,3 з зубчастою передачею 4 приводу опорного колеса за типом планетарної передачі з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців Z1 центрального колеса, встановленого на ведучій осі 8 транспортного засобу, та Z3 периферійного сателіту (Z1 /Z3)>1. Привод переміщення 5 колісно-крокового важеля є кривошипно-шатунний механізм, що діє на важіль 6, який здійснює кутовий рух відносно точки О3. Важіль 6, шарнірно з'єднаний з проміжною ланкою 7, що діє безпосередньо в точці Б на подовжене плече О2Б ланки 3. У фазі переносу завдяки шарнірному зв'язку ланки 7 з приводом переміщення 5 та колісно-кроковим важелем опорне колесо 9 має вільний рух відносно нерухомого важеля 6. Пружина С1 забезпечує зворотній хід ланки 3. На Фіг.2 зображено положення важеля 6 та колісно-крокового важеля відповідно початку фази крокового руху. Розглянемо кінематику відносного руху ланки 3 з розташованими на ній шестірнями Z2, Z3 під дією приводу переміщення 5. З цієї точки зору проаналізуємо кінематику руху ланок приводу 4 відносно умовно нерухомого колеса Z1. У фазі крокового руху на подовжене плече О2Б ланки 3 діє важіль 6 і здійснює її поворот відносно точки О2 - осі повороту периферійного сателіту Z3, а також і опорного колеса 9. 1 - рух корпусу р ушія, визначений кінематикою руху шарнірно з'єднаних ланок приводу 4 опорного колеса у фазі крокового руху, не враховуючи його переміщення зумовленого коченням колеса 9 по опорній поверхні. При цьому, якщо вертикальна складова РБу = РБ×Sina від сили РБ, що діє вздовж плеча О2Б та притискає в точці О2 опорне колесо 9 до поверхні дороги, то горизонтальна складова РБХ×Cosa повертає ланку 3 відносно точки О2, а точка О1 при цьому здійснює відповідний рух вверх разом із віссю сателіту Z 2 та корпусом рушія. Поворот ланки 3, враховуючи, що сателіт Z2 , як і колесо Z1 5 37398 нерухомі відносно один одного, примушує шестірні Z1, Z2 та ланку 2 подібно зубчастій рейці рухатися по зубцям шестірні Z3, яка обертається відносно точки О2. Напрямок обертання сателіту Z 3 та опорного колеса 9 збігається з напрямком, який відповідає руху корпусу вперед, що пояснює механізм появи додаткової кутової швидкості опорного колеса 9 у фазі крокового руху відносно умовно нерухомого корпусу. При зворотному ході важеля 6 приводу переміщення корпус опускається вниз з поворотом ланки 3 відносно точки О2 та протилежним напрямком обертання сателіту Z 3, що призвело би, не враховуючи дії обгінної муфти 11, до появи руху корпусу транспортного засобу в протилежному напрямку. Але наявність обгінної муфти 11, яка передає обертовий момент від приводної осі 8, до колеса Ζ1, забезпечує йому вільний рух відносно точки О у фазі переносу та компенсує появу руху корпусу у протилежному напрямку. Відносний рух ланки 3 з поворотом опорного колеса у фазі крокового руху під дією приводу переміщення 5 відбувається при наявності певної величини опорної реакції RA на колесі 9 колісно-крокового важеля, яка зменшується при повороті плеча О2Б ланки 3 відносно вертикальної осі О2Y, суміщеної на початку фази з плечем О2Б та з центром вісей координат в точці О 2. Сила тяги на колесі змінюється пропорційно реакції RA та коефіцієнту зчеплення φ колеса з дорогою: Τ = RA × φ; де RA = РБ×Sina. Оскільки величина опорної реакції RA на колесі 9 зменшується наприкінці ходу важеля 6 у фазі крокового руху, це може призвести до появи буксування опорного колеса 9. Сила натяжіння пружини С 1, діє вздовж плеча О2Б, створює додаткову складову частину опорної реакції RA' яка зростає наприкінці фази крокового руху. RA' = С1 × f 1 × Cos b; де: С1; f 1 - жорсткість пружини С1 та її деформація; b - кут між напрямком дії пружини С1 та плечем O2Б. RAS = RA + RA'; У фазі переносу, коли відбувається поворот важеля 6 проти руху годинникової стрілки відносно точки О3, RAS=RA'. При цьому RA' по ходу руху важеля 6 назад зменшується відповідно силі натяжіння пружини С 1, яка в кінці ходу важеля 6 дорівнює О, що створює умови легкого підйому опорного колеса 9 при в'їзді на поверхню перешкоди. Для забезпечення ефективності роботи обох типів рушіїв, необхідно забезпечити зберігання умови сумісності їх роботи, тобто рівності лінійних швидкостей їх опорних коліс. V9= V10; V9 = w 9 × R9; де R9 - радіус опорного колеса коліснокрокового рушія V10 = w10 × R 10; де R10 - радіус опорного колеса колісного рушія, 6 де w9, w10 - кутові швидкості опорних коліс. w9 = w10, якщо опорні колеса розташовані на єдиній приводній осі. При цьому, якщо ми вибрали умови рівності лінійних швидкостей опорних коліс рушіїв відповідно швидкості V9 у фазі переносу колеса колісно-крокового важеля (коли важіль 6 здійснює поворот відносно точки О3 проти руху годинникової стрілки), то у фазі крокового руху швидкість V9 збільшується, відповідно V9 >V10. Для зберігання умови рівності лінійних швидкостей у цьому випадку необхідно встановити обгінну муфту між приводною віссю 8 та колесом 10 колісного рушія. У випадку, якщо вибрано умови рівності лінійних швидкостей опорних коліс рушіїв відповідно швидкості у фазі крокового руху опорного колеса колісно-крокового важеля, то у фазі переносу лінійна швидкість V9 > V10. Враховуючи, що напрямки обертання опорного колеса 9 та центрального колеса Ζ1 збігаються, то обгінна муфта 11, встановлена між колесом Ζ1 та приводною віссю 8, спрацьовує і поява вільного руху на колесі Ζ1 компенсує появу нерівності швидкостей опорних коліс. Таким чином, якщо для умови рівності лінійних швидкостей опорних коліс рушіїв вибрано швидкість V9 у фазі крокового руху, то відпадає необхідність встановлення додаткової обгінної муфти між колесом 10 колісного рушія та ведучою віссю 8. Практично рівність лінійних швидкостей опорних коліс рушіїв при виборі по V9 у фазі крокового руху означає, що при сумісній роботі рушіїв колісно-кроковий важіль починає діяти та передавати рух на корпус транспортного засобу при появі буксування колеса 10 колісного рушія, коли V10 < V9 . Схема рушія, зображеного на Фіг.3, відрізняється від схеми рушія на Фіг.1 тим, що обгінна муфта 11, встановлена між нерухомою відносно корпусу віссю 8 та колесом Ζ1, що відповідно визначає напрямок обертання колеса Ζ1 - проти руху годинникової стрілки відносно точку О. Таким чином, в колісно-кроковому режимі роботи за рахунок дії приводу переміщення 5 передається через ланки 2, 3 на корпус відносний рух, кінематику якого було розглянуто для схеми Фіг.1, 2. При цьому, р ух транспортного засобу має бути дискретний, імпульсний, якщо не враховува ти наявність руху від колісного рушія. Якщо ми вибрали умову рівності лінійних швидкостей опорних коліс рушіїв, відповідно швидкості опорного колеса V9 колісно-крокового важеля у фазі крокового руху, то при появі буксування колеса 10 колісного рушія колісно-кроковий важіль передає імпульсний рух на корпус, і слідом за ним рух передається від дії колісного рушія. Практично рух транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі з малою швидкістю є можливим при роботі у важких дорожніх умовах. Швидкість такого руху визначається пропорційно кількості робочих циклів колісно-крокового важеля за одиницю часу. Кількість робочих циклів колісно-крокового важеля за одиницю часу може бути підвищена або за рахунок підвищення потужності приводу переміщення 5, або за рахунок маховика, 7 37398 встановленого на швидкохідній вісі приводу 5, який живить втрати енергії приводу на імпульсний рух. Таким чином, комбінований транспортний засіб з колісним рушієм та встановленим у приводі переміщення колісно-крокового важеля 5 маховиком, може бути застосований як тягач для будівельно-дорожніх машин та механізмів, які працюють у режимах із значною силою тяги та в важких дорожніх умовах. Комбінований транспортний засіб з колісним рушієм та з встановленим колісно-кроковим рушієм за схемою на Фіг.1, 2 та Фіг.3 може бути застосований для переїзду дорожніх перешкод значної висоти, та порогових. При цьому колісно-кроковий важіль має бути встановлено або на ведучу вісь транспортного засобу, або в іншому місці, якщо застосовується рушій за схемою на Фіг.3, при умові, що центр ваги транспортного засобу розташовано або в точці А (Фіг.1), або лівіше від точки А, при чому задня вісь колісного рушія має бути ведучою. Практично розташування коліснокрокового важеля відносно положення центру ваги транспортного засобу зручно лише у випадку, якщо застосовано рушій за схемою Фіг.3, для якого місце розташування осі центрального сателіту Ζ1 має бути вибрано довільно. Якщо центр ваги розташовано справа від точки А, то при в'їзді на поверхню перешкоди значної висоти може відбутися перекидання назад корпусу транспортного засобу. Для забезпечення можливості переїзду дорожніх перешкод транспортним засобом, центр ваги якого розташований справа від точки А (Фіг.1), або його положення не визначено, необхідно забезпечити активний в'їзд задньої частини корпуса на поверхню перешкоди. На Фіг.4 зображено транспортний засіб з колісним та колісно-кроковим рушієм за схемою на Фіг.1,3, але який відрізняється від попередніх схем тим, що на задній приводній вісі колісного рушія шарнірно встановлено додатковий колісно-кроковий важіль 12, застосований за схемою, як задній по ходу руху важіль рушія, аналога [Пат. України № 13492 МПК B62D57/02 (2006.01)]. Важіль 13 у вихідному положенні колісно-крокового рушія опущено в положення І, при підйомі вверх у положення II колісно-кроковий важіль опускається вниз до появи контакту з дорогою його опорного колеса 14. Включення колісно-крокового важеля відбувається практично одразу же після в'їзду на поверхню перешкоди колесом 9 переднього коліснокрокового важеля. При опущенні колісно-крокового важеля 12 до появи контакту з дорогою його опорного колеса 14, колесо 15 колісного рушія відривається від опорної поверхні, а сам важіль 12 пересилюючий натяжіння пружини С4 повертається відносно точки О вперед по ходу руху під дією моменту обертання на його опорному колесі. В'їзд на поверхню перешкоди задньою частиною корпусу здійснюється опорними колесами обох рушіїв. Пружини С3, С4 забезпечують повернення важеля 12 у вихідне положення після в'їзду на поверхню перешкоди, а важіль 13 встановлюється у положення 1. 8 Переїзд колісним транспортним засобом з встановленим колісно-кроковим рушієм одиночних дорожніх перешкод значної висоти може бути здійснено за один цикл роботи колісно-крокового рушія. Відповідно у приводі переміщення коліснокрового рушія має бути встановлено додаткову муфту [1], яка є муфтою одно оборотної дії, що спрацьовує при натисканні на педаль або важіль включення та передає обертовий момент протягом одного оберту з ведучого валу на кривошип приводу переміщення. Якщо педаль керування муфтою постійно натиснута, то відповідно передається на кривошип також постійний обертовий момент. Автоматичне включення колісно-крокового рушія можливе, якщо при в'їзді на поверхню перешкоди рух при підйомі колеса 9 колісно-крокового важеля та ланки 3 передається на важіль включення цієї муфти. При цьому кінематика приводу дозволяє здійснювати вільний рух ланки 3 відносно нерухомого важеля 6 приводу переміщення, завдяки їх шарнірному зв'язку за допомогою ланки 7. Перелік фігур креслення 1,2 Схема колісно-крокового рушія, встановленого на ведучу вісь транспортного засобу, з постійно діючим приводом обертання опорного колеса колісно-крокового важеля. 3 Схема колісно-крокового рушія, встановленого на нерухому вісь транспортного засобу. 4 - Схема колісно-крокового рушія, додатково встановленого на задню ведучу вісь колісного транспортного засобу. 5 - Схема колісно-крокового рушія з двома колісно-кроковими важелями за схемою Фіг.3, привод переміщення яких діє протифазно. 6,7 - Схема переїзду дорожніх перешкод колісним транспортним засобом з встановленим колісно-кроковим рушієм за схемою Фіг 1,3 та Фіг 4. Приклад конкретного виконання 3 метою перевірки поставленої задачи експериментального підтвердження дієздатності рушіїв за схемою Фіг.1, 2, 3, встановлених на колісний транспортний засіб, було зроблено модель колісного рушія із задньою ведучою віссю та колісно-кроковим рушієм за схемою Фіг.3, встановленим в передній частині корпусу. Коліснокроковий важіль за схемою Фіг.4 було шарнірно встановлено на задню вісь. Розташування коліснокрокових важелів на корпусі транспортного засобу здійснено за схемою Фіг.7. Передатне відношення шестірень приводу опорного колеса обох коліснокрокових важелів: Z1/Z3=1,5. Амплітуда кроку рушія за схемою Фіг.3 дорівнювала 90мм при відсутності опору руху корпусу транспортного засобу, при цьому діаметр опорного колеса колісно-крокового важеля дорівнював 60мм, колісно-кроковий важіль за схемою Фіг.4 знаходився у вихідному положенні, а привод задньої ведучої вісі вимкнуто. Вага моделі транспортного засобу дорівнювала 5кг. Центр ваги моделі був розташований посередині між вісями коліс колісного рушія. Переїзд дорожньої перешкоди висотою 40мм у колісно-кроковому режимі важелем, що 9 встановлений у передній частині корпусу транспортного засобу мав незначну зупинку на початку в'їзду опорним колесом колісно-крокового важеля. Переїзд дорожньої перешкоди задньою віссю моделі був беззупинковим. При появі буксування колеса задньої ведучої осі (рух в умовах слабкого зчеплення колеса з опорною 37398 10 поверхньою) корпус моделі продовжував рухатись з періодичним уповільненням руху відповідно періоду дії переднього колісно-крокового важеля з амплітудою руху 40мм. Літератруа: С.Н.Кожевников «Механизмы», «Машиностроение», 1976г, стр.434, 435. 11 Комп’ютерна в ерстка Л.Литв иненко 37398 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of continuous displacement of a vehicle with a wheel-step mover in wheel-step mode
Автори англійськоюShtompel Mykola Mykolaiovych
Назва патенту російськоюСпособ непрерывного передвижения транспортного средства с колесно-шаговым движителем в колесно-шаговом режиме
Автори російськоюШтомпель Николай Николаевич
МПК / Мітки
МПК: B62D 57/00
Мітки: колісно-кроковим, транспортного, режимі, безперервного, засобу, пересування, рушієм, спосіб, колісно-кроковому
Код посилання
<a href="https://ua.patents.su/6-37398-sposib-bezperervnogo-peresuvannya-transportnogo-zasobu-z-kolisno-krokovim-rushiehm-u-kolisno-krokovomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі</a>
Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Номер патенту: 13492
Опубліковано: 17.04.2006
Автор: Штомпель Микола Миколайович
МПК: B62D 57/00
Мітки: безперервного, спосіб, пересування, транспортного, режимі, засобу, колісно-кроковим, рушієм, колісно-кроковому
Формула / Реферат:
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс, який відрізняється тим, що застосовують рушій з колісно-кроковим важелем, складеним з двох важелів, з'єднаних з корпусом шарнірно і за допомогою пружин, що визначають вихідне положення важелів, кожен...
Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Номер патенту: 5351
Опубліковано: 15.03.2005
Автор: Штомпель Микола Миколайович
МПК: B62D 57/00
Мітки: пересування, транспортного, режимі, рушієм, колісно-кроковому, засобу, спосіб, колісно-кроковим, безперервного
Формула / Реферат:
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що полягає у послідовному переміщенні коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім у включенні крокового ходу коліс, який відрізняється тим, що для забезпечення стійкості колісно-крокового руху і здійснення активного і безперервного руху транспортного засобу у фазі переносу застосований рушій з...
Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Номер патенту: 28662
Опубліковано: 25.12.2007
Автор: Штомпель Микола Миколайович
МПК: B62D 57/00
Мітки: спосіб, колісно-кроковим, режимі, колісно-кроковому, пересування, рушієм, засобу, безперервного, транспортного
Формула / Реферат:
1. Спосіб пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс з колісно-кроковим рушієм, який складається з двох шарнірно з’єднаних з корпусом важелів, кожен з яких містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з’єднаними...
Привід пересування транспортного рейкового засобу
Номер патенту: 20258
Опубліковано: 15.01.2007
Автори: Генералов Олег Олександрович, Шуріна Марія Леонідівна, Маргуліс Михайло Володимирович
МПК: B61F 3/00
Мітки: привід, пересування, засобу, рейкового, транспортного
Формула / Реферат:
Привід пересування транспортного рейкового засобу, який містить електродвигун, зубчасту передачу, муфти, проміжні вали, привідні колеса, який відрізняється тим, що зубчаста передача виконана у вигляді двох одноступеневих силових хвильових зубчастих передач, які розташовані симетрично відносно електродвигуна і з'єднані з ним через подвійні зубчасті муфти, а вхідний вал кожної хвильової зубчастої передачі через систему муфт і проміжних валів...
Спосіб пересування транспортного засобу та двигун для його здійснення
Номер патенту: 51692
Опубліковано: 16.12.2002
Автор: Дешко Ігор Віталійович
МПК: F03G 3/00
Мітки: пересування, засобу, двигун, спосіб, здійснення, транспортного
Формула / Реферат:
1. Спосіб пересування транспортного засобу, що полягає у перетворюванні впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом взаємодії інерційних мас, які рухаються, з інерційними елементами, що встановлені на корпусі, який відрізняється тим, що інерційні маси переміщують примусово в системі відліку обертових інерційних елементів.2. Двигун для пересування транспортного засобу, який містить корпус, зв'язаний з...
Попередній патент: Спосіб лікування гострих та підгострих травматичних субдуральних крововиливів
Наступний патент: Матриця для витягування порожнистих виробів з косим дном
Випадковий патент: Спосіб лікування хронічних періодонтитів