Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Формула / Реферат
1. Спосіб пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс з колісно-кроковим рушієм, який складається з двох шарнірно з’єднаних з корпусом важелів, кожен з яких містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з’єднаними сателітами при співвідношенні кількості зубців Z1 центрального колеса і Z3 периферійного сателіта - (Z3/Z1)>1, з розташованим на осі проміжного сателіта заднього, по ходу руху, важеля рушія кривошипним механізмом з пружиною, який при обертанні ведучої шестірні Z1 створює реактивний момент, що діє на важіль і встановлює його в положення відповідно фазам колісно-крокового руху, який відрізняється тим, що застосовують задній важіль, складений з двох шарнірно з’єднаних ланок, які в період ходу руху важеля назад повертаються в тому ж напрямку послідовно, що забезпечує зберігання кутової швидкості опорного колеса у фазі переносу, причому поворот нижньої ланки з опорним колесом здійснюється реактивним моментом, який визначається моментом, що задається на осі периферійного сателіта.
2. Спосіб за п. 1, який відрізняється тим, що застосовують рушій, передній та задній важелі якого є складеними зі спільною верхньою ланкою, шарнірно з’єднаною з корпусом рушія, поворот якої здійснюється приводом переміщення важелів відповідно фазам колісно-крокового руху, нижні ланки важелів з опорними колесами рухаються відносно точок шарнірного з’єднання з верхньою ланкою за рахунок дії реактивного моменту, який визначається моментом, що задається на осі периферійного сателіта.
3. Спосіб за п. 1, який відрізняється тим, що застосовують для колісного транспортноґо засобу рушій з одним колісно-кроковим важелем, складеним з двох шарнірно з’єднаних ланок з приводом його переміщення за типом кривошипно-повзунного механізму з пружним шатуном, що діє у фазі крокового руху на нижню ланку важеля рушія, забезпечуючи її колісно-кроковий рух та зворот у вихідне положення у фазі переносу, причому центральний сателіт приводу опорного колеса важеля рушія розташований на ведучій осі транспортного засобу.
4. Спосіб за п. 3, який відрізняється тим, що для переїзду одиночних дорожніх перешкод значної висоти застосовують привід рушія, який забезпечує можливість встановлення колісно-крокового важеля в зафіксоване положення, відповідне початку фази крокового руху та зворот у вихідне положення.
Текст
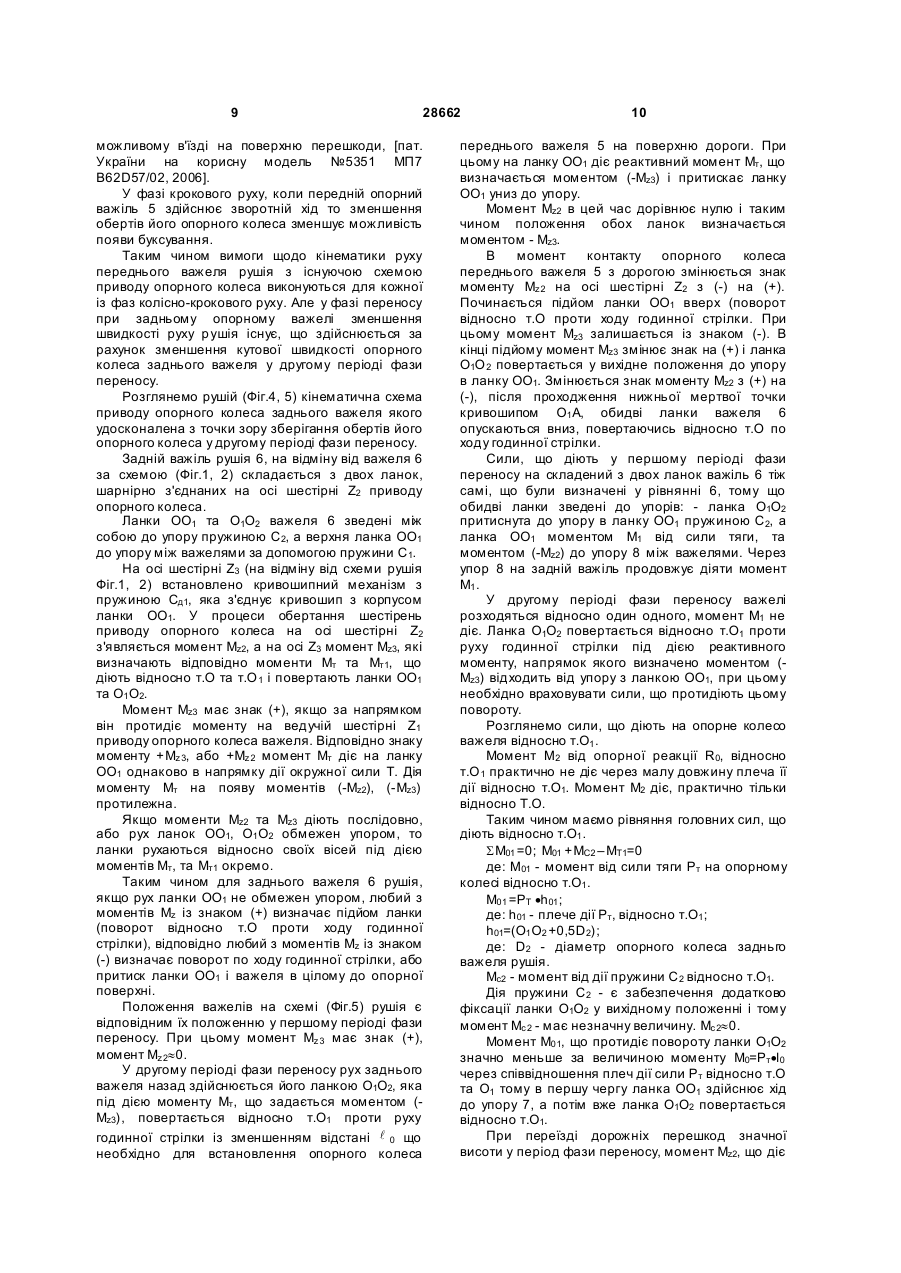
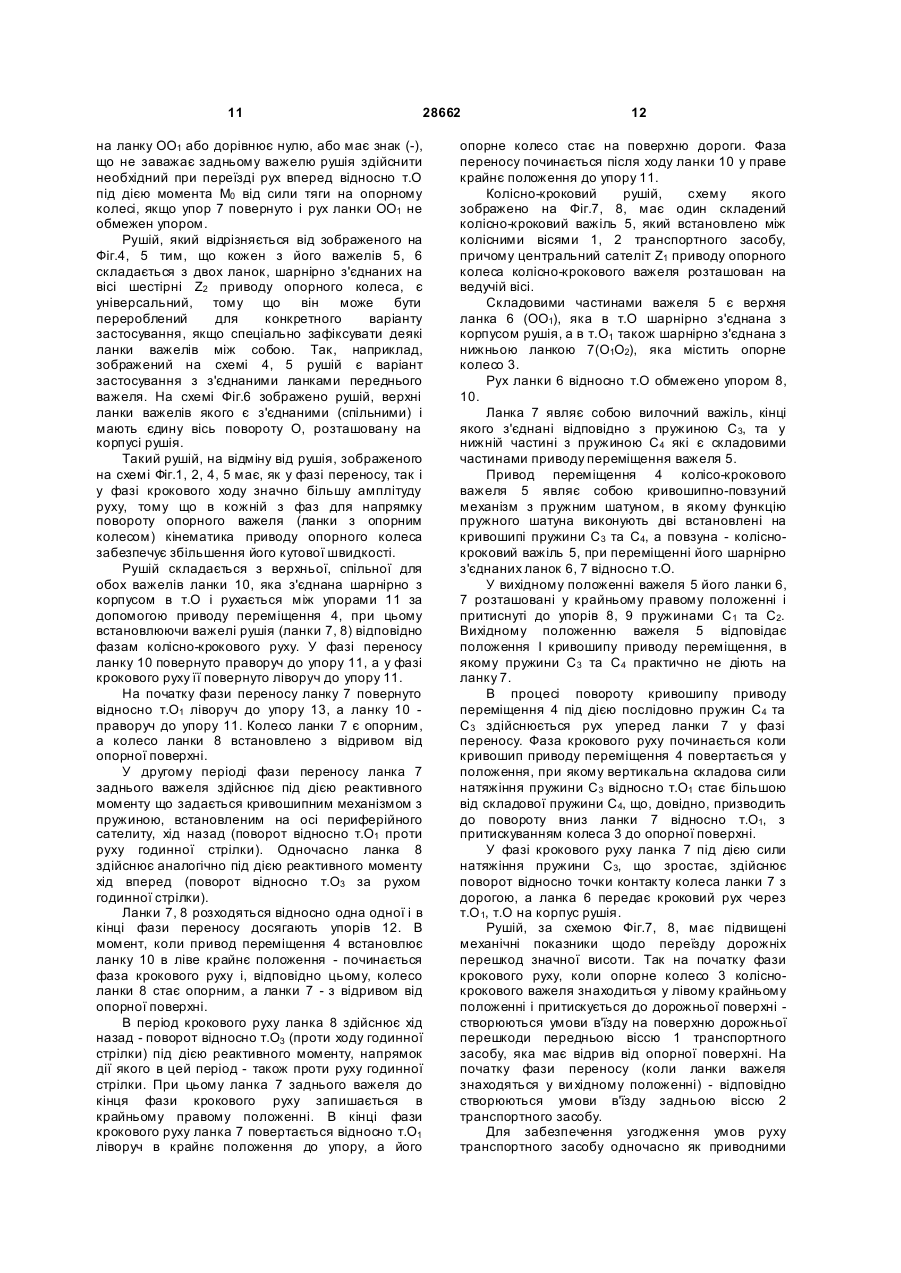
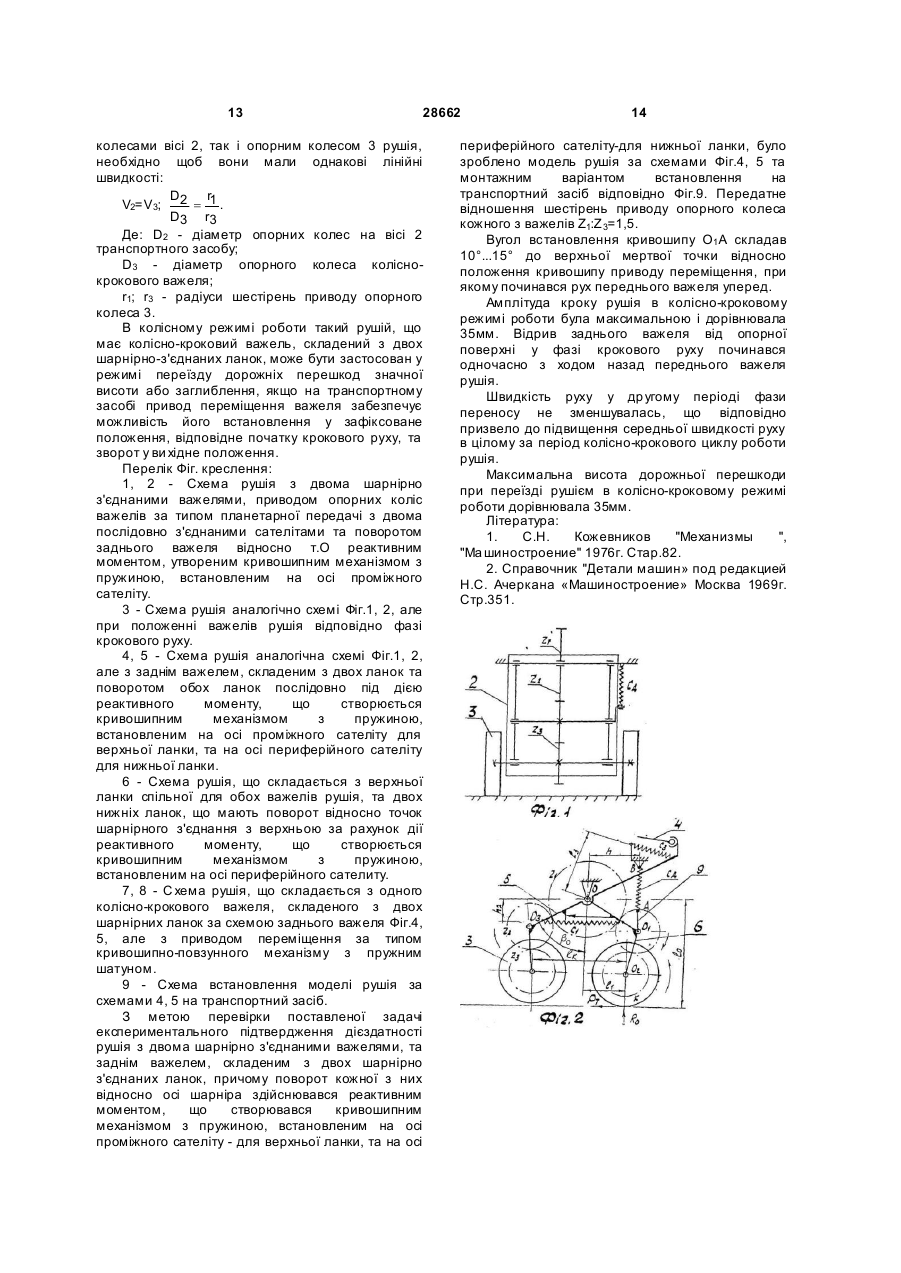
1. Спосіб пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс з колісно-кроковим рушієм, який складається з двох шарнірно з’єднаних з корпусом важелів, кожен з яких містить зубчасту передачу приводу опорного колеса за типом планетарної передачі з двома послідовно з’єднаними сателітами при співвідношенні кількості зубців Z1 центрального колеса і Z3 периферійного сателіта - (Z3/Z 1)>1, з розташованим на осі проміжного сателіта заднього, по ходу руху, важеля рушія кривошипним механізмом з пружиною, який при обертанні ведучої шестірні Z1 створює реактивний момент, що діє на важіль і встановлює його в положення відповідно фазам колісно-крокового руху, який відрізняється тим, що застосовують задній важіль, складений з двох шарнірно з’єднаних ланок, які в період ходу руху важеля назад повертаються в тому ж напрямку послідовно, що забезпечує зберігання кутової швидкості опорного колеса у фазі переносу, причому поворот нижньої ланки з опорним колесом здійснюється реактивним моментом, який U 2 (19) 1 3 28662 крокування. Аналог винаходу: [Авторські свідоцтва СРСР №640897, МПК2: B62D57/02, 1979; №698830, МПК2: B62D57/02]. Недоліком цього способу пересування є те, що для забезпечення стійкості і рівномірності руху він застосований лише для спеціальних транспортних засобів високої прохідності, у трансмісії яких передбачений складний індивідуальний привод крокування на кожне з опорних коліс, число яких не менше чотирьох. Спосіб пересування за типом рушія, що складається з двох важелів, з'єднаних з корпусом шарнірно, кожен з яких містить зубчасту передачу приводу опорного колеса і являє собою планетарну передачу з двома послідовно з'єднаними сателітами при співвідношенні кількості зубців Z1, центрального колеса і Z3 периферійного сателіту - (Ζ1 /Ζ 3>1), здійснює стійкий рух в колісно-кроковому режимі роботи, а також переїзд дорожніх перешкод значної висоти в колісному режимі роботи. Аналог винаходу: [пат. України на корисну модель №13492 МПК B62D57/02 (2006.01)]. Стійкий колісно-кроковий рух р ушія забезпечується завдяки встановлення відповідного положення важелів рушія відносно фаз колісно-крокового руху. У фазі переносу задній, по ходу руху, важіль рушія має бути опорним, а передній - безопорним. У фазі крокового руху, навпаки, передній, по ходу р уху, важіль є опорним, а задній - безопорним. Зміна положень важелів рушія, щодо контакту з поверхнею дороги, здійснюється завдяки тому, що встановлюють вихідне положення важелів рушія відповідно фази переносу а у фазі крокового руху притиск переднього важеля до опорної поверхні здійснюється завдяки повороту важелів відносно т.О - точки їх шарнірного з'єднання з корпусом в напрямку, що збігається з напрямком обертання опорного колеса. Поворот важелів відносно т.О відбувається за рахунок введення в привод опорного колеса одного з важелів механізму, що періодично здійснює у фазі крокового руху повне або часткове блокування шестірень приводу. При повному блокуванні застосовують гальмо, що діє на вісь шестiрні приводу опорного колеса і зупиняє її обертання, при цьому виникає поворот важелів рушія відносно т.О, як колеса з радіусом OK. Застосовують інший спосіб встановлення важелів рушія, щодо контакту з опорною поверхнею, який полягає в тому, що замість блокування приводу опорного колеса важеля, необхідний поворот важелів рушія здійснюється під дією реактивного моменту, який відзначається моментом, що задається на осі ведомої шестерні приводу опорного колеса [п.2, пат. України на корисну модель №13942 МПК B62D37/02 (2006.01)]. Цей спосіб встановлення важелів рушія є менш енергоємним, та більш швидкодіючим ніж спосіб повного блокування приводу опорних коліс. При іспиті моделі рушія, важелі якого встановлюються щодо контакту з опорною 4 поверхнею відповідно фазам колісно-крокового руху за рахунок дії реактивного моменту було визначено, що стійкий колісно-кроковий рух має місце при наяві дорожніх перешкод незначної висоти. Колісно-кроковий рух в умовах переїзду дорожніх перешкод значної висоти був обмежений у фазі переносу за рахунок втрати активної дії заднього важеля та його опорного колеса при в'їзді на поверхню перешкоди, а також зменшенням швидкості руху на протязі дії фази. Задача - удосконалити показники рушія в колісно-кроковому режимі роботи, визначивши вимоги до кінематичної схеми приводу опорних коліс важелів, що забезпечують оптимальне положення важелів, щодо контакту з опорною поверхнею в кожній із фаз колісно-крокового руху з врахуванням дії реактивного моменту. Для аналізу руху важелів рушія під дією реактивного моменту розглянемо детальніше механізм цієї дії, на прикладі застосування у існуючих те хнічних пристроях. Дія реактивного моменту застосовується у технічних пристроях, наприклад, у ремінних передачах з самонатяжінням, "Sespa". Головним елементом пристрою є встановлене на осі ведучої шестерні приводу водило, що містить вісь ведомого зубчастого колеса, та нерухомо встановлений на ній шків ремінної передачі, які разом з водилом мають можливість повороту відносно осі ведучої шестірні. При обертанні на водило діє реактивний момент від окружної сили Τ на ведучій шестірні приводу пропорційно моменту, що передається. Якщо пристрій встановлено на осі ведомої шестірні, а шків з зубчастим колесом є ведучим, напрямок дії реактивного моменту відповідно змінюється на протилежний. На Фіг.1, 2 зображено кінематичну схему важелів рушія, де задній, по ходу руху, важель рушія рухається відносно т.О під дією реактивного моменту, який визначається моментом Mz2, заданим на осі ведомої шестірні Z2 кривошипним механізмом з пружиню Сд. Момент Μz2, при кожному пів-оберті кривошипу змінюється за величиною та напрямком відносно осі У, яка направлена вздовж лінії Α1В. Момент Mz2, на протязі одного півоберту кривошипу зберігає напрямок дії, змінюючись тільки за величиною, але у другому - момент Μz2, змінюється відносно т.О1 за напрямком дії і відповідно змінюється також і момент Мт. Напрямок дії моменту Мz 2, із знаком (+) визначається в тому півоберті кривошипу О1 А відносно осі У (з напрямком вздовж О1В), в якому момент Μz2 , протидіє повороту ведучої шестірні Ζ1 приводу опорного колеса. При цьому величина окружної сили Τ зростає, а момент Мт повертає важель відносно т.О в напрямку дії сили Т. Відповідно схемі, зображеній на Фіг.1, 2 задній важель 6 рушія, якщо на осі шестірні Ζ2 задано момент Μz(+), повертається проти руху годинної стрілки, та відривається від опорної поверхні. У наступному півоберті кривошипу О1 А напрямок дії моменту Μz2 (-) співпадає з 5 28662 6 напрямком обертання шестірні Ζ1. Шестірня Ζ2 під Момент Мд є момент з постійним напрямком дією моменту Мz2 (-) оббігає навколо Ζ1, дії але змінний за величиною в залежності від повертаючи навколо т.О важель 6 по ходу руху вугла a повороту кривошипу О 1 А. годинної стрілки, який відповідно стає опорним. Після проходу верхньої мертвої точки (1) MT=rД1·Т кривошипом О1 А момент зростає і повертає де: rд1 - радіус ділильної окружності шестірні відносно т.О на плечі h важель 6 з відривом від Z1; опорної поверхні. Цей період зростання моменту Мд використовується на початку фази крокового M z2 T= руху, коли передній важель 5 стає опорним. rД2 Спосіб керування поворотом важелів рушія де: rд2 - радіус ділильної окружності шестірні відносно т.О за рахунок дії на них реактивного Z2. моменту Мт, що задається моментом Μz2 на осі Реактивний момент, що діє на важель рушія шестірні Z2 приводу опорного колеса є можливим, створюється від окружної сили Τ на ведучій як для безопорного важеля, так і для опорного шестірні Ζ1 приводу опорного колеса. важеля в умовах р уху р ушія по дорожній поверхні ' Д1 з незначною висотою перешкод. При цьому МТ = Т · rД1 = Мz2 · ; момент, що передається приводом на опорне rД2 колесо важеля, незначний, що не впливає на рух де: rд1=mz1/2; rд2=mz2/2 - радіуси ділильних важелів та під дією моменту Мт. окружностів шестірень Ζ1, Z2. Але, якщо р ух здійснюється в умовах де: m - модуль шестірень; бездоріжжя необхідно враховувати момент Мт у Z1, Z2- кількість зубців шестірень. загальному рівнянні сил, діючих на важелі рушія. Z Для проведення порівняльного аналізу МТ = Мz2 · 1 ; Z2 відповідності положення важелів рушія фазам Для безопорного важеля, який не має колісно-крокового руху під дією зовнішніх сил, а взаємодії з опорною поверхнею, сила Τ також з врахуванням дії реактивного моменту Мт визначається тільки моментом Μz2 , що задається достатньо визначити напрямок дії моменту Мт кривошипним механізмом на осі шестірні Ζ2. відносно т.О, або його знак - для безопорного (2) Мz2=h 1·CД ·ХД; важеля, але для опорного важеля необхідно додатково враховувати також моменти сил, що де: h1 - плече дії пружини С д відносно Т.О1; діють в контакті колеса з опорною поверхнею. Сд - жорсткість пружини; Хд - де формація пружини С д. Розглянемо декілька схем колісно-крокових Величини h1, Хд - пропорційно залежні від рушіїв з постійно діючим приводом опорного вугла повороту кривошипу О1А відносно осі ОХ колеса важеля. Колісно-кроковий рушій(аналог), зображений кривошипу О1А. Вісь координат У встановлюється на Фіг.1,2 складається з двох важелів 5,6 вздовж лінії O1B. з'єднаних шарнірно в т.О з корпусом рушія. Кожен h1 =rкр ·cosa із важелів 5, 6 містить зубчасту передачу приводу h1 =rкр ·sina 2 опорного колеса (Ζ1, Ζ 2, Ζ3) розташовану за Mz2 =r кр ·sina·cosa схемою планетарної передачі з двома послідовно z MT =r 2кр·СД · 1 · sina·cosa; сателітами при співвідношенні (3)з'єднаними z2 кількості зубців – Ζ1 центрального колеса та Z3 При кожному оберті кривошипу, коли О1А периферійного сателіту (Z3/Z1>1). співпадає з напрямком O1B плече кривошипу h1=0, Привод переміщення - 4 односторонньої дії, а момент Μz2 двічі дорівнює 0; який здійснює хід важеля 5 вперед у фазі Вугол a при якому Μz2 має максимальну переносу. Пружина С 3 здійснює зворотній хід величину визначається з умови, що похідна від важеля 5. Пружина С1 - встановлена між важелями 5, 6 і p pn функції (sina·cosa)¢=0; cos2a=0; a = + ; де: n забезпечує їх зведення до упору 8 відносно т.О. 4 2 Сила натяжіння пружини С 3 відносно т.О діє - ціле число; a=135°. через упор 8 на важель 6 у фазі переносу. На осі Якщо місто кріплення пружини Сд шестерні Z2 заднього, по ходу руху, важеля рушія розташовано не на самому важелі а на корпусі встановлено кривошип 9 (з пружиною Сд). рушія, то окрім моменту ΜΖ2 відносно т.О1 Рушій зображений на Фіг.1, 2 має положення з'являється момент Мд, що діє на важель 6 з важелів 5, 6, та кривошипу О 1 А, що відповідає плечем h навіть у період положення кривошипу фазі переносу. О1 А в мертвій точці. Колісно-кроковий цикл роботи рушія, (4) МД=ХД ·СД ·(h+rкр · cosa); здійснюється за період одного оберту кривошипу де: Хд - деформація пружини Сд; приводу переміщення важелів 4, а також і Хд=rкр·sina кривошипу, на вісі шестерні Z2 приводу опорного Таким чином відносно т.О на важель 6 діють колеса, які мають однакові кутові швидкості. моменти Фаза переносу починається з моменту, коли (5) ΜS=Мд±ΜΖ2 ; важель 6 рушія стає опорним і руху вперед важеля Постійна складова Мд залежить від вибору 5 під дією приводу переміщення 4. В період дії величини h. фази переносу важелі 5, 6 розходяться друг 7 28662 відносно друга при опорному важелі 6, причому рух заднього важеля 6 відбувається пізніше відносно ходу переднього. В кінці ходу вперед переднього важеля обидва важелі мають контакт з опорною поверхнею, але поворот з підйомом заднього важеля триває і він встановлюється з відривом від опорної поверхні на початку фази крокового руху. Фаза крокового руху триває на протязі повороту важеля 5 проти руху годинної стрілки під дією пружини С3 до упору в корпус. При дальшому повороті кривошипу О1 А момент Мт змінює напрямок дії відносно т.О, важель 6 опускається в опорне положення. Умови рівноваги заднього важеля 6 в коліснокроковому режимі роботи рушія у першому періоді фази переносу відповідають умовам рівноваги заднього опорного важеля рушія при переїзді дорожніх перешкод рушієм в колісному режимі роботи, що визначається формулами 1, 2 [пат. України на корисну модель №13942 МПК B62D57/02 (2006.01)] але без врахування дії пружин Сд. Перший період фази переносу, в якому умови рівноваги заднього важеля 6 відповідають умовам визначеним в формулах 1, 2 триває від початку фази переносу, коли важель 6 стає в опорне положення і до початку руху заднього важеля 6 назад. Але відповідність формулам 1, 2 для заднього опорного важеля зберігається і далі, якщо в цей період здійснюється в'їзд на поверхню дорожньої перешкоди, опорний важель 6 під дією зростаючого моменту від сили тяги Рт має переміщення вперед до відновлення контакту важелів в упорі 8. Через упор 8 на задній важель діє момент M1. В цей період фази переносу необхідно забезпечити чітке встановлення заднього важеля 6 в опорне положення після його повороту зверхувниз в кінці фази крокового руху, момент Μz2 має знак (-); ΜΣ=Мд-Мz2 І періодфази переносу М0=М1+М2 ; рух по рівній дорожнійповерхні (6) М0³ М1 +М2; при переїзді дорожніх перешкод (7) де: М0 - момент від сили тяги на опорному колесі відносно т.О; М1 - момент від сили натяжіння пружини С3 відносно т.О; М2 - момент від дії опорної реакції R0 на колесі відносно т.О. В другому періоді фази переносу, коли почався рух важеля 5 вперед відносно заднього опорного 6 необхідно здійснювати рівномірний поворот назад заднього важеля 6 (важелі 5,6 розходяться відносно друг друга) який триває до встановлення важеля 5 в опорне положення. При цьому l O - відстань від т.О шарнірного з'єднання 1 важелів до опорної поверхні зменшується. МS =МД +Мz2; Практично встановлення напрямку дії моменту Мт і, відповідно, напрямку повороту важеля 6 відносно т.О забезпечується за рахунок встановлення вугла положення кривошипу О1А відносно положення кривошипу приводу переміщення 4, в якому починається рух 8 переднього важеля 5. Відповідно Фіг.5, сили що діють на передній опорний важель 5 відносно т.О у фазі крокового руху приведені у рівнянні. SМ0=0; М0 =М1-М2+М3 (8) де: M0 - момент від сили тяги Рт на опорному колесі відносно т.О; Μ1 - момент від сили натяжіння пружини С3 відносно т.О; М2 - момент від опорної реакції на колесі важеля 5 відносно т.О; М3 - момент від дії сили натяжіння пружини С1 відносно т.О; М0 =РТ ·l01 де: Рт - сила тяги на опорному колесі переднього важеля; l01 - плече дії сили Рт відносно т.О М1 =С3·Х3·l3 ; де: С3 - жорсткість пружини; Х3 - де формація пружини С 3; l3 - плече дії пружини С 3 відносно т.О. М2 =R01 ·l1; де: R01 - опорна реакція на колесі важеля 5; l1 - плече дії R0 відносно т.О. М3 =С1 ·Х1 ·h2; де: С1 - жорсткість пружини; Х1 - де формація пружини; Х1=2lx1(sinb-sinb 0); де: b 0 - вугол при якому важелі 5, 6 зведені до упору; h2 =І x1 ·cosb - плече дії пружини С 1 відносно т.О М3 =2С1 ·l2 xl ·(sinb-sinb 0)·cosb; Для крокового режиму роботи, коли опорний важель 5 має зворотний хід, величина М3 залежить від деформації Χ1 пружини Сі, при зростанні якої зменшується плече її дії відносно т.О, тому з метою спрощення аналізу приймаємо М3»const. Таким чином поворот відносно т.О переднього опорного важеля 5 у фазі крокового руху відбувається за допомогою моменту М1 від дії пружини С 3, та М3 від пружини С 1 відносно т.О, а момент М0 та М2 протидіють цьому повороту. (9) М1+М3³ М0+М2 Таким чином, в основному, момент М1 визначає інтенсивність крокового руху. Проаналізуємо цикл роботи рушія, схема якого зображена на Фіг.1, 2 по фазах колісно-крокового руху, та визначимо характерні недоліки кінематики приводу опорних коліс важелів рушія. З точки зору рівномірності руху у фазі переносу, як визначено раніше, небажано зменшення швидкості обертання опорного колеса заднього важеля, але цей факт має місце у др угій половині періоду фази переносу, коли важіль 6 здійснює поворот проти руху годинної стрілки при зменшенні обертів його опорного колеса за рахунок відносного руху важеля (важелі 5 та 6 розходяться відносно друг др уга). При цьому у фазі переносу, коли важелі 5, 6 розходяться відносно друг др уга зріст швидкості обертання опорного колеса переднього важеля 5 при ході вперед є необхідною умовою при 9 28662 можливому в'їзді на поверхню перешкоди, [пат. України на корисну модель №5351 МП7 B62D57/02, 2006]. У фазі крокового руху, коли передній опорний важіль 5 здійснює зворотній хід то зменшення обертів його опорного колеса зменшує можливість появи буксування. Таким чином вимоги щодо кінематики руху переднього важеля рушія з існуючою схемою приводу опорного колеса виконуються для кожної із фаз колісно-крокового руху. Але у фазі переносу при задньому опорному важелі зменшення швидкості руху р ушія існує, що здійснюється за рахунок зменшення кутової швидкості опорного колеса заднього важеля у другому періоді фази переносу. Розглянемо рушій (Фіг.4, 5) кінематична схема приводу опорного колеса заднього важеля якого удосконалена з точки зору зберігання обертів його опорного колеса у другому періоді фази переносу. Задній важіль рушія 6, на відміну від важеля 6 за схемою (Фіг.1, 2) складається з двох ланок, шарнірно з'єднаних на осі шестірні Z2 приводу опорного колеса. Ланки ОО1 та О1О2 важеля 6 зведені між собою до упору пружиною С 2, а верхня ланка ОО1 до упору між важелями за допомогою пружини С1. На осі шестірні Z3 (на відміну від схеми рушія Фіг.1, 2) встановлено кривошипний механізм з пружиною Сд1, яка з'єднує кривошип з корпусом ланки ОО1. У процеси обертання шестірень приводу опорного колеса на осі шестірні Z2 з'являється момент Μz2, а на осі Z3 момент Mz3, які визначають відповідно моменти Мт та Мт1, що діють відносно т.О та т.О 1 і повертають ланки ОО1 та О1 О2. Момент Μz3 має знак (+), якщо за напрямком він протидіє моменту на ведучій шестірні Ζ1 приводу опорного колеса важеля. Відповідно знаку моменту +Mz 3, або +Μz 2 момент Мт діє на ланку ОО1 однаково в напрямку дії окружної сили Т. Дія моменту Мт на появу моментів (-Μz2), (-Мz3) протилежна. Якщо моменти Μz2 та Μz3 діють послідовно, або рух ланок ОО1, О1 О2 обмежен упором, то ланки рухаються відносно своїх вісей під дією моментів Мт, та Мт1 окремо. Таким чином для заднього важеля 6 рушія, якщо рух ланки ОО1 не обмежен упором, любий з моментів Μz із знаком (+) визначає підйом ланки (поворот відносно т.О проти ходу годинної стрілки), відповідно любий з моментів Μz із знаком (-) визначає поворот по ходу годинної стрілки, або притиск ланки ОO1 i важеля в цілому доопорної поверхні. Положення важелів на схемі (Фіг.5) рушія є відповідним їх положенню у першому періоді фази переносу. При цьому момент Μz 3 має знак (+), момент Μz 2»0. У другому періоді фази переносу рух заднього важеля назад здійснюється його ланкою О1О2, яка під дією моменту Мт, що задається моментом (Мz3), повертається відносно т.О1 проти руху годинної стрілки із зменшенням відстані l 0 що необхідно для встановлення опорного колеса 10 переднього важеля 5 на поверхню дороги. При цьому на ланку ОО1 діє реактивний момент Мт, що визначається моментом (-Мz3) і притискає ланку ОО1 униз до упору. Момент Μz2 в цей час дорівнює нулю і таким чином положення обох ланок визначається моментом - Мz3. В момент контакту опорного колеса переднього важеля 5 з дорогою змінюється знак моменту Мz 2 на осі шестірні Ζ2 з (-) на (+). Починається підйом ланки ОО1 вверх (поворот відносно т.О проти ходу годинної стрілки. При цьому момент Μz3 залишається із знаком (-). В кінці підйому момент Μz3 змінює знак на (+) і ланка О1О 2 повертається у вихідне положення до упору в ланку ОО1. Змінюється знак моменту Μz2 з (+) на (-), після проходження нижньої мертвої точки кривошипом О1 А, обидві ланки важеля 6 опускаються вниз, повертаючись відносно т.О по ходу годинної стрілки. Сили, що діють у першому періоді фази переносу на складений з двох ланок важіль 6 тіж самі, що були визначені у рівнянні 6, тому що обидві ланки зведені до упорів: - ланка О1О2 притиснута до упору в ланку ОО1 пружиною С2, а ланка ОО1 моментом М1 від сили тяги, та моментом (-Мz2) до упору 8 між важелями. Через упор 8 на задній важіль продовжує діяти момент M1 . У другому періоді фази переносу важелі розходяться відносно один одного, момент М1 не діє. Ланка О1О2 повертається відносно т.О1 проти руху годинної стрілки під дією реактивного моменту, напрямок якого визначено моментом (Μz3) відходить від упору з ланкою ОО1, при цьому необхідно враховувати сили, що протидіють цьому повороту. Розглянемо сили, що діють на опорне колесо важеля відносно т.О1 . Момент М2 від опорної реакції R0, відносно т.О 1 практично не діє через малу довжину плеча її дії відносно т.О1. Момент М2 діє, практично тільки відносно Т.О. Таким чином маємо рівняння головних сил, що діють відносно т.O1 . SМ01 =0; М01 +МС2 – МТ1=0 де: М01 - момент від сили тяги Рт на опорному колесі відносно т.О1 . М01 =РТ ·h01 ; де: h01 - плече дії Рт, відносно т.О1 ; h01=(O1 O2 +0,5D2); де: D2 - діаметр опорного колеса задньго важеля рушія. Мс2 - момент від дії пружини С 2 відносно т.О1. Дія пружини С 2 - є забезпечення додатково фіксації ланки О1О2 у вихідному положенні і тому момент Мс 2 - має незначну величину. Мс 2»0. Момент М01, що протидіє повороту ланки О1О2 значно меньше за величиною моменту М0= Рт·l0 через співвідношення плеч дії сили Рт відносно т.О та Ο1 тому в першу чергу ланка ОО1 здійснює хід до упору 7, а потім вже ланка О1О2 повертається відносно т.О1. При переїзді дорожніх перешкод значної висоти у період фази переносу, момент Μz2, що діє 11 28662 на ланку ОО1 або дорівнює нулю, або має знак (-), що не заважає задньому важелю рушія здійснити необхідний при переїзді рух вперед відносно т.О під дією момента M0 від сили тяги на опорному колесі, якщо упор 7 повернуто і рух ланки ОО1 не обмежен упором. Рушій, який відрізняється від зображеного на Фіг.4, 5 тим, що кожен з його важелів 5, 6 складається з двох ланок, шарнірно з'єднаних на вісі шестірні Z2 приводу опорного колеса, є універсальний, тому що він може бути перероблений для конкретного варіанту застосування, якщо спеціально зафіксувати деякі ланки важелів між собою. Так, наприклад, зображений на схемі 4, 5 рушій є варіант застосування з з'єднаними ланками переднього важеля. На схемі Фіг.6 зображено рушій, верхні ланки важелів якого є з'єднаними (спільними) і мають єдину вісь повороту О, розташовану на корпусі рушія. Такий рушій, на відміну від рушія, зображеного на схемі Фіг.1, 2, 4, 5 має, як у фазі переносу, так і у фазі крокового ходу значно більшу амплітуду руху, тому що в кожній з фаз для напрямку повороту опорного важеля (ланки з опорним колесом) кінематика приводу опорного колеса забезпечує збільшення його кутової швидкості. Рушій складається з верхньої, спільної для обох важелів ланки 10, яка з'єднана шарнірно з корпусом в т.О і рухається між упорами 11 за допомогою приводу переміщення 4, при цьому встановлюючи важелі рушія (ланки 7, 8) відповідно фазам колісно-крокового руху. У фазі переносу ланку 10 повернуто праворуч до упору 11, а у фазі крокового руху її повернуто ліворуч до упору 11. На початку фази переносу ланку 7 повернуто відносно т.О1 ліворуч до упору 13, а ланку 10 праворуч до упору 11. Колесо ланки 7 є опорним, а колесо ланки 8 встановлено з відривом від опорної поверхні. У другому періоді фази переносу ланка 7 заднього важеля здійснює під дією реактивного моменту що задається кривошипним механізмом з пружиною, встановленим на осі периферійного сателиту, хід назад (поворот відносно т.О1 проти руху годинної стрілки). Одночасно ланка 8 здійснює аналогічно під дією реактивного моменту хід вперед (поворот відносно т.О3 за рухом годинної стрілки). Ланки 7, 8 розходяться відносно одна одної і в кінці фази переносу досягають упорів 12. В момент, коли привод переміщення 4 встановлює ланку 10 в ліве крайнє положення - починається фаза крокового руху і, відповідно цьому, колесо ланки 8 стає опорним, а ланки 7 - з відривом від опорної поверхні. В період крокового руху ланка 8 здійснює хід назад - поворот відносно т.О3 (проти ходу годинної стрілки) під дією реактивного моменту, напрямок дії якого в цей період - також проти руху годинної стрілки. При цьому ланка 7 заднього важеля до кінця фази крокового руху запишається в крайньому правому положенні. В кінці фази крокового руху ланка 7 повертається відносно т.О1 ліворуч в крайнє положення до упору, а його 12 опорне колесо стає на поверхню дороги. Фаза переносу починається після ходу ланки 10 у праве крайнє положення до упору 11. Колісно-кроковий рушій, схему якого зображено на Фіг.7, 8, має один складений колісно-кроковий важіль 5, який встановлено між колісними вісями 1, 2 транспортного засобу, причому центральний сателіт Ζ1 приводу опорного колеса колісно-крокового важеля розташован на ведучій вісі. Складовими частинами важеля 5 є верхня ланка 6 (ОО1), яка в т.О шарнірно з'єднана з корпусом рушія, а в т.О1 також шарнірно з'єднана з нижньою ланкою 7(О1О2), яка містить опорне колесо 3. Рух ланки 6 відносно т.О обмежено упором 8, 10. Ланка 7 являє собою вилочний важіль, кінці якого з'єднані відповідно з пружиною С 3, та у нижній частині з пружиною С 4 які є складовими частинами приводу переміщення важеля 5. Привод переміщення 4 колісо-крокового важеля 5 являє собою кривошипно-повзуний механізм з пружним шатуном, в якому функцію пружного шатуна виконують дві встановлені на кривошипі пружини С 3 та С4, а повзуна - коліснокроковий важіль 5, при переміщенні його шарнірно з'єднаних ланок 6, 7 відносно т.О. У вихідному положенні важеля 5 його ланки 6, 7 розташовані у крайньому правому положенні і притиснуті до упорів 8, 9 пружинами С 1 та С2. Вихідному положенню важеля 5 відповідає положення І кривошипу приводу переміщення, в якому пружини С 3 та С4 практично не діють на ланку 7. В процесі повороту кривошипу приводу переміщення 4 під дією послідовно пружин С 4 та С3 здійснюється рух уперед ланки 7 у фазі переносу. Фаза крокового руху починається коли кривошип приводу переміщення 4 повертається у положення, при якому вертикальна складова сили натяжіння пружини С 3 відносно т.О1 стає більшою від складової пружини С4, що, довідно, призводить до повороту вниз ланки 7 відносно т.О1, з притискуванням колеса 3 до опорної поверхні. У фазі крокового руху ланка 7 під дією сили натяжіння пружини С 3, що зростає, здійснює поворот відносно точки контакту колеса ланки 7 з дорогою, а ланка 6 передає кроковий рух через т.О 1, т.О на корпус рушія. Рушій, за схемою Фіг.7, 8, має підвищені механічні показники щодо переїзду дорожніх перешкод значної висоти. Так на початку фази крокового руху, коли опорне колесо 3 коліснокрокового важеля знаходиться у лівому крайньому положенні і притискується до дорожньої поверхні створюються умови в'їзду на поверхню дорожньої перешкоди передньою віссю 1 транспортного засобу, яка має відрив від опорної поверхні. На початку фази переносу (коли ланки важеля знаходяться у ви хідному положенні) - відповідно створюються умови в'їзду задньою віссю 2 транспортного засобу. Для забезпечення узгодження умов руху транспортного засобу одночасно як приводними 13 28662 колесами вісі 2, так і опорним колесом 3 рушія, необхідно щоб вони мали однакові лінійні швидкості: D r V2=V3; 2 = 1 . D 3 r3 Де: D2 - діаметр опорних колес на вісі 2 транспортного засобу; D3 - діаметр опорного колеса коліснокрокового важеля; r1; r3 - радіуси шестірень приводу опорного колеса 3. В колісному режимі роботи такий рушій, що має колісно-кроковий важель, складений з двох шарнірно-з'єднаних ланок, може бути застосован у режимі переїзду дорожніх перешкод значної висоти або заглиблення, якщо на транспортному засобі привод переміщення важеля забезпечує можливість його встановлення у зафіксоване положення, відповідне початку крокового руху, та зворот у ви хідне положення. Перелік Фіг. креслення: 1, 2 - Схема рушія з двома шарнірно з'єднаними важелями, приводом опорних коліс важелів за типом планетарної передачі з двома послідовно з'єднаними сателітами та поворотом заднього важеля відносно т.О реактивним моментом, утвореним кривошипним механізмом з пружиною, встановленим на осі проміжного сателіту. 3 - Схема рушія аналогічно схемі Фіг.1, 2, але при положенні важелів рушія відповідно фазі крокового руху. 4, 5 - Схема рушія аналогічна схемі Фіг.1, 2, але з заднім важелем, складеним з двох ланок та поворотом обох ланок послідовно під дією реактивного моменту, що створюється кривошипним механізмом з пружиною, встановленим на осі проміжного сателіту для верхньої ланки, та на осі периферійного сателіту для нижньої ланки. 6 - Схема рушія, що складається з верхньої ланки спільної для обох важелів рушія, та двох нижніх ланок, що мають поворот відносно точок шарнірного з'єднання з верхньою за рахунок дії реактивного моменту, що створюється кривошипним механізмом з пружиною, встановленим на осі периферійного сателиту. 7, 8 - С хема рушія, що складається з одного колісно-крокового важеля, складеного з двох шарнірних ланок за схемою заднього важеля Фіг.4, 5, але з приводом переміщення за типом кривошипно-повзунного механізму з пружним шатуном. 9 - Схема встановлення моделі рушія за схемами 4, 5 на транспортний засіб. З метою перевірки поставленої задачі експериментального підтвердження дієздатності рушія з двома шарнірно з'єднаними важелями, та заднім важелем, складеним з двох шарнірно з'єднаних ланок, причому поворот кожної з них відносно осі шарніра здійснювався реактивним моментом, що створювався кривошипним механізмом з пружиною, встановленим на осі проміжного сателіту - для верхньої ланки, та на осі 14 периферійного сателіту-для нижньої ланки, було зроблено модель рушія за схемами Фіг.4, 5 та монтажним варіантом встановлення на транспортний засіб відповідно Фіг.9. Передатне відношення шестірень приводу опорного колеса кожного з важелів Ζ1:Ζ 3=1,5. Вугол встановлення кривошипу О1 А складав 10°...15° до верхньої мертвої точки відносно положення кривошипу приводу переміщення, при якому починався рух переднього важеля уперед. Амплітуда кроку рушія в колісно-кроковому режимі роботи була максимальною і дорівнювала 35мм. Відрив заднього важеля від опорної поверхні у фазі крокового руху починався одночасно з ходом назад переднього важеля рушія. Швидкість руху у др угому періоді фази переносу не зменшувалась, що відповідно призвело до підвищення середньої швидкості руху в цілому за період колісно-крокового циклу роботи рушія. Максимальна висота дорожньої перешкоди при переїзді рушієм в колісно-кроковому режимі роботи дорівнювала 35мм. Література: 1. С.Н. Кожевников "Механизмы ", "Ма шиностроение" 1976г. Стар.82. 2. Справочник "Детали машин» под редакцией Н.С. Ачеркана «Машиностроение» Москва 1969г. Стр.351. 15 28662 16
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of movement of transportation vehicle with wheel-stepping motor in wheel-step mode
Автори англійськоюShtompel Mykola Mykolaiovych
Назва патенту російськоюСпособ непрерывного передвижения транспортного средства с колесно-шаговым движителем в колесно-шаговом режиме
Автори російськоюШтомпель Николай Николаевич
МПК / Мітки
МПК: B62D 57/00
Мітки: режимі, колісно-кроковим, рушієм, безперервного, спосіб, колісно-кроковому, пересування, засобу, транспортного
Код посилання
<a href="https://ua.patents.su/8-28662-sposib-bezperervnogo-peresuvannya-transportnogo-zasobu-z-kolisno-krokovim-rushiehm-u-kolisno-krokovomu-rezhimi.html" target="_blank" rel="follow" title="База патентів України">Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі</a>
Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Номер патенту: 13492
Опубліковано: 17.04.2006
Автор: Штомпель Микола Миколайович
МПК: B62D 57/00
Мітки: безперервного, спосіб, рушієм, колісно-кроковому, режимі, транспортного, засобу, колісно-кроковим, пересування
Формула / Реферат:
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що включає послідовне переміщення коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім включення крокового ходу коліс, який відрізняється тим, що застосовують рушій з колісно-кроковим важелем, складеним з двох важелів, з'єднаних з корпусом шарнірно і за допомогою пружин, що визначають вихідне положення важелів, кожен...
Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі
Номер патенту: 5351
Опубліковано: 15.03.2005
Автор: Штомпель Микола Миколайович
МПК: B62D 57/00
Мітки: засобу, безперервного, колісно-кроковому, транспортного, спосіб, рушієм, пересування, режимі, колісно-кроковим
Формула / Реферат:
1. Спосіб безперервного пересування транспортного засобу з колісно-кроковим рушієм у колісно-кроковому режимі, що полягає у послідовному переміщенні коліс по опорній поверхні у фазі переносу у ведучому режимі, а потім у включенні крокового ходу коліс, який відрізняється тим, що для забезпечення стійкості колісно-крокового руху і здійснення активного і безперервного руху транспортного засобу у фазі переносу застосований рушій з...
Привід пересування транспортного рейкового засобу
Номер патенту: 20258
Опубліковано: 15.01.2007
Автори: Шуріна Марія Леонідівна, Генералов Олег Олександрович, Маргуліс Михайло Володимирович
МПК: B61F 3/00
Мітки: привід, засобу, рейкового, транспортного, пересування
Формула / Реферат:
Привід пересування транспортного рейкового засобу, який містить електродвигун, зубчасту передачу, муфти, проміжні вали, привідні колеса, який відрізняється тим, що зубчаста передача виконана у вигляді двох одноступеневих силових хвильових зубчастих передач, які розташовані симетрично відносно електродвигуна і з'єднані з ним через подвійні зубчасті муфти, а вхідний вал кожної хвильової зубчастої передачі через систему муфт і проміжних валів...
Спосіб пересування транспортного засобу та двигун для його здійснення
Номер патенту: 51692
Опубліковано: 16.12.2002
Автор: Дешко Ігор Віталійович
МПК: F03G 3/00
Мітки: здійснення, двигун, засобу, транспортного, спосіб, пересування
Формула / Реферат:
1. Спосіб пересування транспортного засобу, що полягає у перетворюванні впливу інерційних мас в односпрямоване пересування транспортного засобу шляхом взаємодії інерційних мас, які рухаються, з інерційними елементами, що встановлені на корпусі, який відрізняється тим, що інерційні маси переміщують примусово в системі відліку обертових інерційних елементів.2. Двигун для пересування транспортного засобу, який містить корпус, зв'язаний з...
Рульова колонка транспортного засобу

Номер патенту: 24161
Опубліковано: 25.06.2007
Автори: Лубяний Микола Миколайович, Петров Андрій Олексійович, Бондар Андрій Миколайович, Петров Віктор Олексійович
МПК: B62D 1/18
Мітки: транспортного, колонка, рульова, засобу
Формула / Реферат:
Рульова колонка транспортного засобу, що складається з рульового колеса, встановленого на рульовому валу, розташованому в трубі рульової колонки, диференціального механізму та крокового двигуна, причому диференціальний механізм розташований на рульовому валу і через систему шестерень приводу зв'язаний з кроковим двигуном, яка відрізняється тим, що вона додатково містить мікропроцесорний сервопривід та два вимірювальних перетворювачі, які...
Попередній патент: Пересувне будівельне риштування
Наступний патент: Комутаційний модульний пристрій
Випадковий патент: Спосіб поліпшення відтворювальної здатності корів м'ясних порід