Стереотаксичний апарат
Номер патенту: 37930
Опубліковано: 15.05.2001
Автори: Сінотін Анатолій Мефодійович, Масловський Сергій Юрьович, Стегній Володимир Олександрович, Слабодчиков Микола Єгорович, Семенець Валерій Васильович, Сальніков Юрій Іванович, Кутовий Ігор Олександрович, Сіпітий Віталій Іванович, П'ятикоп Володимир Олександрович, Аврунін Олег Григорович



Текст
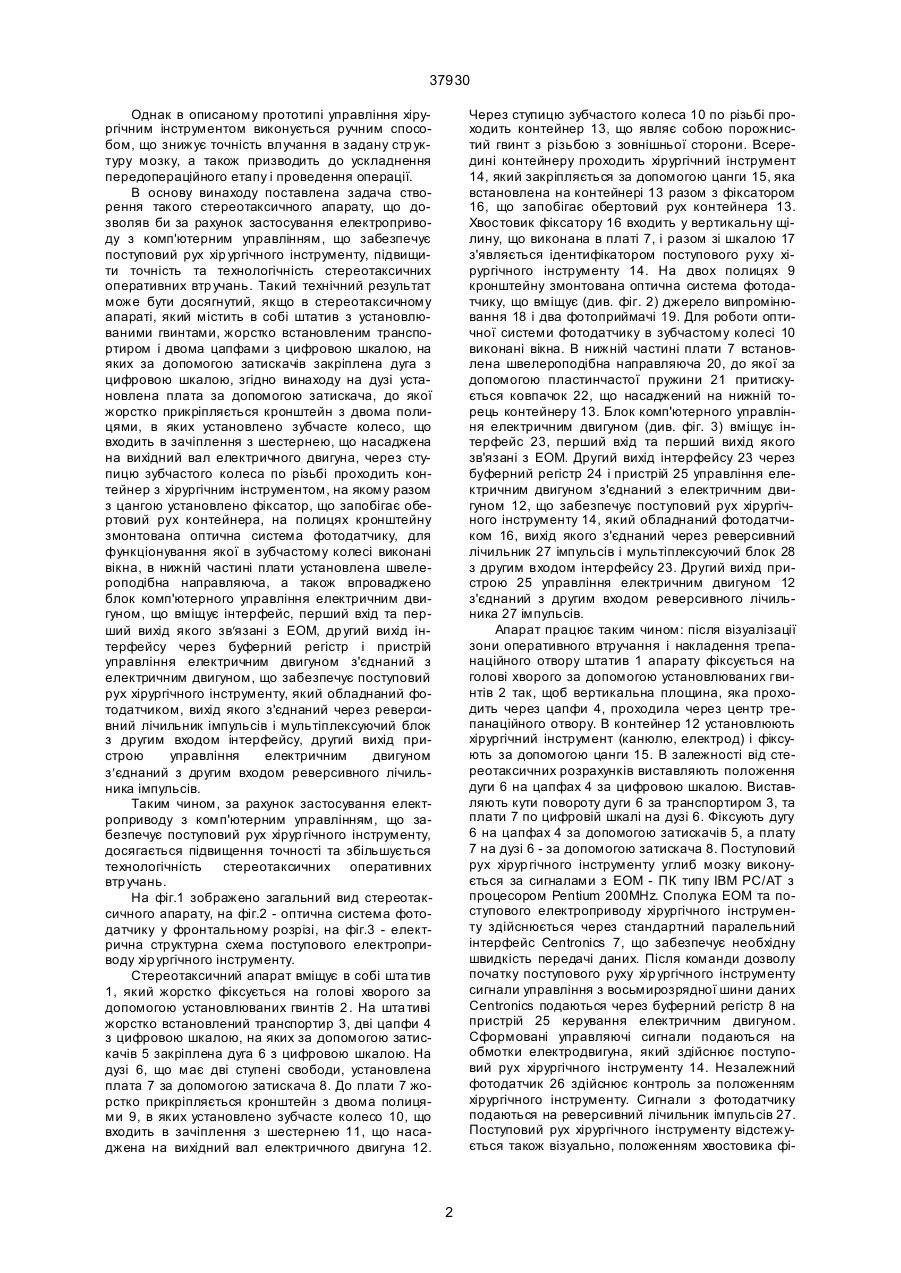
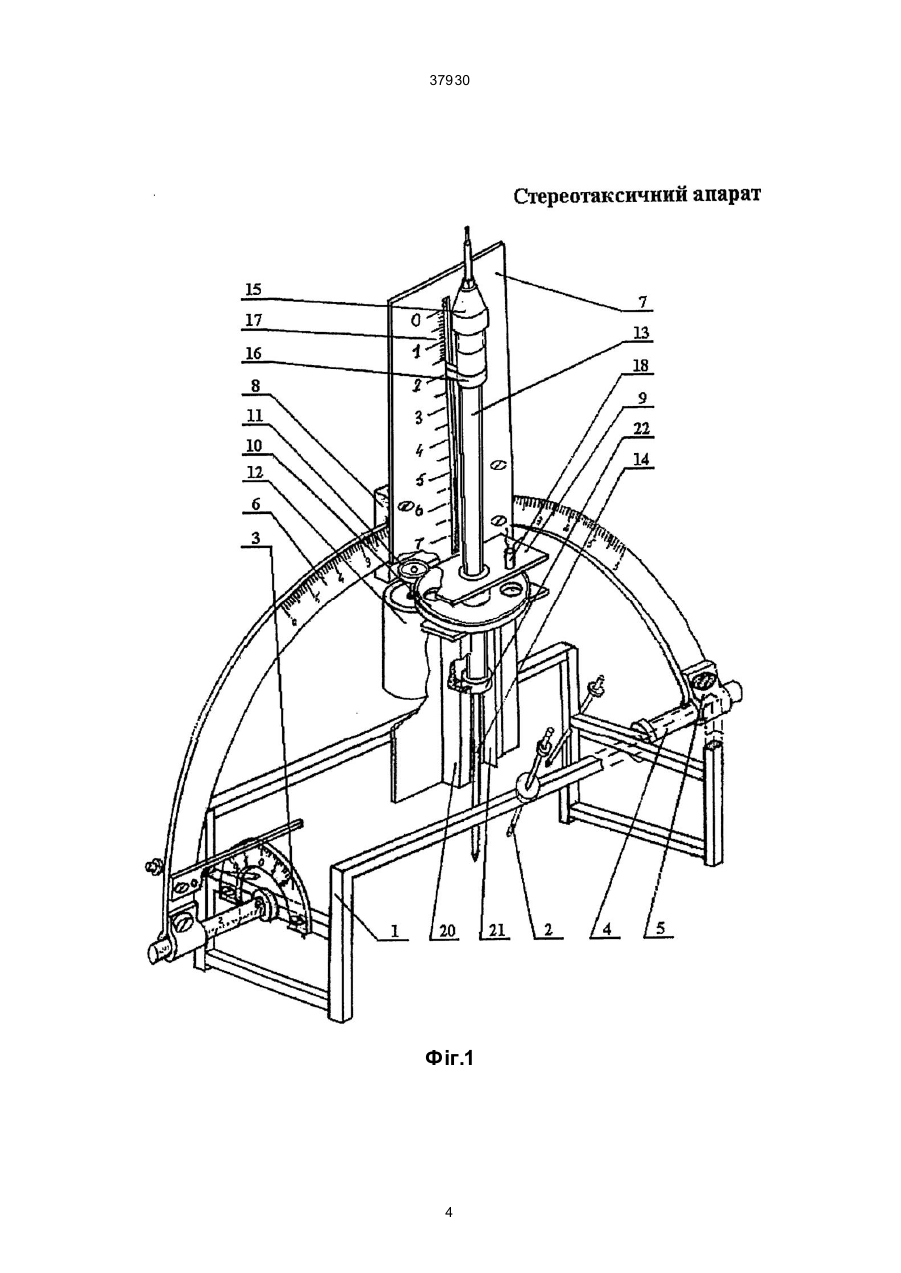
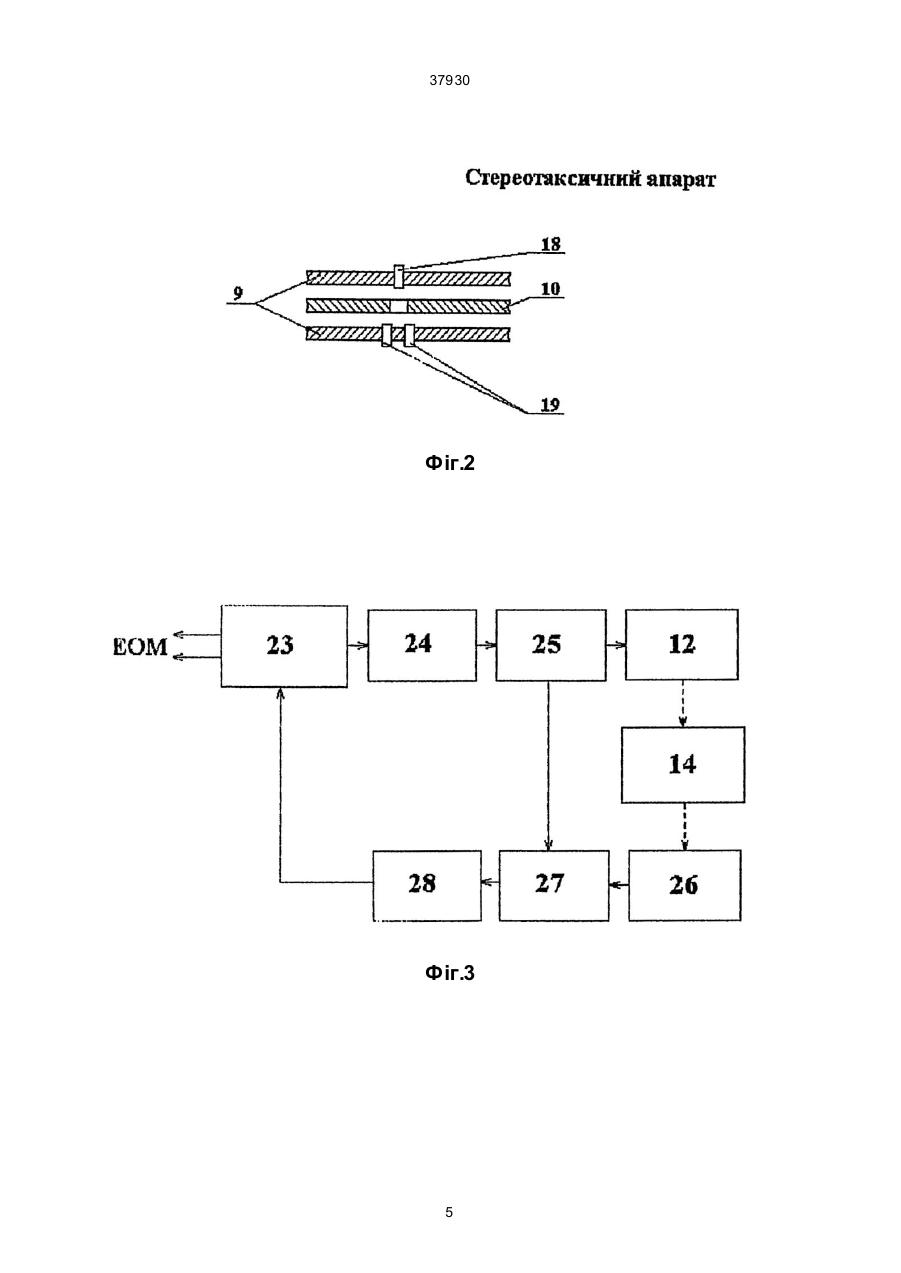
Стереотаксичний аппарат, який вміщує в собі штатив з установлюваними гвинтами, жорстко установленим транспортиром і двома цапфами з цифрового шкалою, на яких за допомогою затискачів закріплена дуга з цифровою шкалою, відрізняється тим, що на дузі установлена плата за допомогою затискача, до якої жорстко прикріпляється кронштейн з двома полицями, в яких установлено зубчасте колесо, що входить в зачіплення з 37930 Однак в описаному прототипі управління хірургічним інструментом виконується ручним способом, що знижує точність влучання в задану стр уктуру мозку, а також призводить до ускладнення передопераційного етапу і проведення операції. В основу винаходу поставлена задача створення такого стереотаксичного апарату, що дозволяв би за рахунок застосування електроприводу з комп'ютерним управлінням, що забезпечує поступовий рух хір ургічного інструменту, підвищити точність та технологічність стереотаксичних оперативних втр учань. Такий технічний результат може бути досягнутий, якщо в стереотаксичному апараті, який містить в собі штатив з установлюваними гвинтами, жорстко встановленим транспортиром і двома цапфами з цифровою шкалою, на яких за допомогою затискачів закріплена дуга з цифровою шкалою, згідно винаходу на дузі установлена плата за допомогою затискача, до якої жорстко прикріпляється кронштейн з двома полицями, в яких установлено зубчасте колесо, що входить в зачіплення з шестернею, що насаджена на вихідний вал електричного двигуна, через ступицю зубчастого колеса по різьбі проходить контейнер з хірургічним інструментом, на якому разом з цангою установлено фіксатор, що запобігає обертовий рух контейнера, на полицях кронштейну змонтована оптична система фотодатчику, для функціонування якої в зубчастому колесі виконані вікна, в нижній частині плати установлена швелероподібна направляюча, а також впроваджено блок комп'ютерного управління електричним двигуном, що вміщує інтерфейс, перший вхід та перший вихід якого зв¢язані з ЕОМ, др угий вихід інтерфейсу через буферний регістр і пристрій управління електричним двигуном з'єднаний з електричним двигуном, що забезпечує поступовий рух хірургічного інструменту, який обладнаний фотодатчиком, вихід якого з'єднаний через реверсивний лічильник імпульсів і мультіплексуючий блок з другим входом інтерфейсу, другий вихід пристрою управління електричним двигуном з¢єднаний з другим входом реверсивного лічильника імпульсів. Таким чином, за рахунок застосування електроприводу з комп'ютерним управлінням, що забезпечує поступовий рух хірур гічного інструменту, досягається підвищення точності та збільшується технологічність стереотаксичних оперативних втр учань. На фіг.1 зображено загальний вид стереотаксичного апарату, на фіг.2 - оптична система фотодатчику у фронтальному розрізі, на фіг.3 - електрична структурна схема поступового електроприводу хір ургічного інструменту. Стереотаксичний апарат вміщує в собі шта тив 1, який жорстко фіксується на голові хворого за допомогою установлюваних гвинтів 2 . На штативі жорстко встановлений транспортир 3, дві цапфи 4 з цифровою шкалою, на яких за допомогою затискачів 5 закріплена дуга 6 з цифровою шкалою. На дузі 6, що має дві ступені свободи, установлена плата 7 за допомогою затискача 8. До плати 7 жорстко прикріпляється кронштейн з двома полицями 9, в яких установлено зубчасте колесо 10, що входить в зачіплення з шестернею 11, що насаджена на вихідний вал електричного двигуна 12. Через ступицю зубчастого колеса 10 по різьбі проходить контейнер 13, що являє собою порожнистий гвинт з різьбою з зовнішньої сторони. Всередині контейнеру проходить хірургічний інструмент 14, який закріпляється за допомогою цанги 15, яка встановлена на контейнері 13 разом з фіксатором 16, що запобігає обертовий рух контейнера 13. Хвостовик фіксатору 16 входить у вертикальну щілину, що виконана в платі 7, і разом зі шкалою 17 з'являється ідентифікатором поступового руху хірургічного інструменту 14. На двох полицях 9 кронштейну змонтована оптична система фотодатчику, що вміщує (див. фіг. 2) джерело випромінювання 18 і два фотоприймачі 19. Для роботи оптичної системи фотодатчику в зубчастому колесі 10 виконані вікна. В нижній частині плати 7 встановлена швелероподібна направляюча 20, до якої за допомогою пластинчастої пружини 21 притискується ковпачок 22, що насаджений на нижній торець контейнеру 13. Блок комп'ютерного управління електричним двигуном (див. фіг. 3) вміщує інтерфейс 23, перший вхід та перший вихід якого зв'язані з ЕОМ. Другий вихід інтерфейсу 23 через буферний регістр 24 і пристрій 25 управління електричним двигуном з'єднаний з електричним двигуном 12, що забезпечує поступовий рух хірургічного інструменту 14, який обладнаний фотодатчиком 16, вихід якого з'єднаний через реверсивний лічильник 27 імпульсів і мультіплексуючий блок 28 з другим входом інтерфейсу 23. Другий вихід пристрою 25 управління електричним двигуном 12 з'єднаний з другим входом реверсивного лічильника 27 імпульсів. Апарат працює таким чином: після візуалізації зони оперативного втручання і накладення трепанаційного отвору штатив 1 апарату фіксується на голові хворого за допомогою установлюваних гвинтів 2 так, щоб вертикальна площина, яка проходить через цапфи 4, проходила через центр трепанаційного отвору. В контейнер 12 установлюють хірургічний інструмент (канюлю, електрод) і фіксують за допомогою цанги 15. В залежності від стереотаксичних розрахунків виставляють положення дуги 6 на цапфах 4 за цифровою шкалою. Виставляють кути повороту дуги 6 за транспортиром 3, та плати 7 по цифровій шкалі на дузі 6. Фіксують дугу 6 на цапфах 4 за допомогою затискачів 5, а плату 7 на дузі 6 - за допомогою затискача 8. Поступовий рух хірур гічного інструменту углиб мозку виконується за сигналами з ЕОМ - ПК типу IBM PC/AT з процесором Pentium 200MHz. Сполука ЕОМ та поступового електроприводу хірургічного інструменту здійснюється через стандартний паралельний інтерфейс Centronics 7, що забезпечує необхідну швидкість передачі даних. Після команди дозволу початку поступового руху хір ургічного інструменту сигнали управління з восьмирозрядної шини даних Centronics подаються через буферний регістр 8 на пристрій 25 керування електричним двигуном. Сформовані управляючі сигнали подаються на обмотки електродвигуна, який здійснює поступовий рух хірургічного інструменту 14. Незалежний фотодатчик 26 здійснює контроль за положенням хірургічного інструменту. Сигнали з фотодатчику подаються на реверсивний лічильник імпульсів 27. Поступовий рух хірургічного інструменту відстежується також візуально, положенням хвостовика фі 2 37930 ксатору 16 відносно шкали 17. Сигнали з лічильника імпульсів подаються в мультиплексуючий блок 28, який дозволяє передавати дані по тетрадам в ЕОМ. За сигналом стартового положення хірургічного інструменту автоматично обнуляються дані в лічильнику імпульсів. Сигнали шини управління Centronics використовуються для керування тетрадами. Управління поступовим електричним при водом хірургічного інструменту здійснюється за допомогою низько рівневого драйвера, який написаний мовою Assembler. Електропривід здійснює поступовий рух хірургічного інструменту з кроком 0,1 мм з амплітудою 150 мм. Згідно обмеженню довжини лінії зв'язку з інтерфейсом Centronics, стереотаксичний апарат повинен розташовуватись на відстані не більше 2 м від ЕОМ. 3 37930 Фіг.1 4 37930 Фіг.2 Фіг.3 5 37930 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Автори англійськоюAvrunin Oleh Hryhorovych, Semenets Valerii Vasyliovych, Maslovskyi Serhii Yuriiovych, Sipitii Vitalii Ivanovych, Piatykop Volodymyr Oleksandrovych, Kutovyi Ihor Oleksandrovych
Автори російськоюАврунин Олег Григорьевич, Семенец Валерий Васильевич, Масловский Сергей Юрьевич, Сипитий Виталий Иванович, Пятикоп Владимир Александрович, Кутовый Игорь Александрович
МПК / Мітки
МПК: A61B 19/00
Мітки: стереотаксичний, апарат
Код посилання
<a href="https://ua.patents.su/6-37930-stereotaksichnijj-aparat.html" target="_blank" rel="follow" title="База патентів України">Стереотаксичний апарат</a>
Апарат для стереотаксичних операцій на глибинних структурах головного мозку
Номер патенту: 34855
Опубліковано: 15.03.2001
Автори: Кутовий Ігор Олександрович, Масловський Сергій Юрьович, Сіпітий Віталій Іванович, Семенець Валерій Васильович, П'ятикоп Володимир Олександрович, Аврунін Олег Григорович
МПК: A61B 19/00
Мітки: мозку, апарат, структурах, глибинних, операцій, головного, стереотаксичних
Формула / Реферат:
Апарат для стереотаксичних операцій на глибинних структурах головного мозку, який містить в собі стереотаксичний маніпулятор, що з'єднай з хірургічним інструментом, систему навігації, з'єднану з першим входом ЕОМ, другий вхід якої зв'язан з системою контроля за станом пацієнта, що відрізняється тим, що стереотаксичний маніпулятор містить інтерфейс, перший вихід якого через буферний регістр з'єднаний з пристроями управління електричними...
Портативний хірургічний апарат для внутрішньосудинних операцій
Номер патенту: 219
Опубліковано: 31.08.1998
Автор: Криса Василь Михайлович
МПК: A61B 17/22, A61B 17/50
Мітки: операцій, апарат, внутрішньосудинних, портативний, хірургічний
Формула / Реферат:
Портативний хірургічний апарат для внутрішньосудинних операцій, що включає приводний механізм Із набором Інтімтромбекстракторів і джерело живлення, який відрізняється тим, що приводний механізм, виконаний у вигляді вібромеханічного механізму Із знімними наконечниками і зв'язаний через електромеханічний двигун з джерелом живлення, що є автономним, які розміщені в портативному корпусі рукоятці, на якому встановлений перемикач, при цьому...
Пускорегулюючий апарат

Номер патенту: 38524
Опубліковано: 15.05.2001
Автори: Гаряжа Василь Миколайович, Рой Віктор Федорович, Гаряжа Олексій Васильович, Гезуля Наталья Миколаївна
МПК: H05B 41/18
Мітки: апарат, пускорегулюючий
Текст:
...мостовий випрямляч 4. Вторинна обмотка 2 трансформатора ввімкнута послідовно з лампою 5. Радіочастотний фільтр 6 захищає мережу від перешкод, виникнення яких можливе під час вмикання та роботи лампи. При вмиканні живлення від мережі напруга через мостовий випрямлювач 4 подається на тирис торний генератор імпульсів 3, навантажений на обмотку 1 трансформатора. Двічі за період напруги живлення після перевищення нею порогового рівня...
Апарат для мікрохвильової резонансної терапії
Номер патенту: 32614
Опубліковано: 15.02.2001
Автори: Пономаренко Анатолій Федорович, Степанов Володимир Євгенович, Яненко Олексій Пилипович, Сітько Сергій Пантелеймонович, Паламарчук Володимир Петрович
МПК: A61N 5/02
Мітки: апарат, резонансної, мікрохвильової, терапії
Текст:
...винаходу введені: другий генераторний блок, подвійний хвилевідний трійник, термостат, причому обидва генераторні блоки на діодах Гана частоти fc розмгщені у термостаті, виходи генераторних блоків частоти 2fc під'єднані до входів Е та Н под війного хвилевідного трійника, вихід якого сполучено з входом електрично керованого атенюатора, два цифроаналогові перетворювачі (ЦАП), які входами під'єднані до виходів мікропроцесора, а виходами - перший...
Літальний апарат бірюкова
Номер патенту: 29519
Опубліковано: 15.11.2000
Автор: Бірюков Сергій Михайлович
МПК: B64C 39/06
Мітки: апарат, бірюкова, літальний
Текст:
...убопроводів 12 че рез заслінки 3. Перепускні вікна 17 сполучені з атмосферою через заслінки 4. Горизонтальні трубопроводи 13, 14 парних радіальних тр убопрово дів розміщені зі зміщенням відносно горизонтальних тр убопроводів непарних радіальних трубопроводів на величину, рівну половині відстані (l) між ними. Горизонтальні трубопроводи 13, 14 мають змінний переріз, що зменшується в сторону щі линних сопел 15, що дозволяє створити проміжок між...
Попередній патент: Спосіб звіряння просторо-рознесених еталонів часу та частоти
Наступний патент: Спосіб зниження цукру у крові
Випадковий патент: Спосіб нанесення термопластичного покриття на металевий дріт