Спосіб виділення зображення

Формула / Реферат
Спосіб виділення зображення, у якому зображення об'єкта проектують на фотодіодну матрицю, на виході якої одержують відеосигнал у вигляді набору значень, кожне з яких є сигналом осередку фотодіодної матриці, який відрізняється тим, що зазначений світловий потік другим проекційним об'єктивом проектують на другу фотодіодну матрицю, далі кожний відеосигнал перетворюють у сигнал ліній зображення, для чого величину кожного значення відеосигналу блоком електронних матриць порівнюють (вирахуванням) з величиною кожного сусіднього значення відеосигналу, при величині різниці більше граничного рівня блоком електронних ключів пропускають зазначені значення сигналу, при цьому величина пропущених значень сигналу однакова й вона дорівнює заданій величині (значень сигналу ліній зображення), далі визначають зрушення кожної точки ліній зображення другого об'єктива відносно відповідних точок ліній зображення першого об'єктива, що відповідно визначенню відстаней від об'єктивів до відповідних точок існуючих фігур, для чого перемикають контакти виходу комутатора з кожної лінії контактів входу, які розташовані перпендикулярно напрямку між осями об'єктів, на контакти паралельних їм ліній входу в напрямку від осі другого об'єктива на вісь першого об'єктива, при цьому блоком електронних матриць порівнюють (вирахуванням) отримані величини значень сигналу ліній зображення другого об'єктива з величинами відповідних значень сигналу ліній зображення першого об'єктива, при цьому при величині різниці, рівній нулю, значення сигналу ліній зображення першого блоком електронних ключів пропускають, а при величині різниці, більшій нуля, зазначені значення блоком електронних ключів не пропускають, далі величини пропущених значень блоком регульованих індивідуальних підсилювачів змінюють на величини пропорційно моментам часу пропуску значень сигналу, що задають генератором імпульсів, при цьому величини значень отриманого сигналу (які відповідні лініям зображення першого об'єктива) на світлодіодній матриці мають яскравість, що збільшується залежно від зменшення відстані від точок ліній фігур до першого об'єктива.
Текст
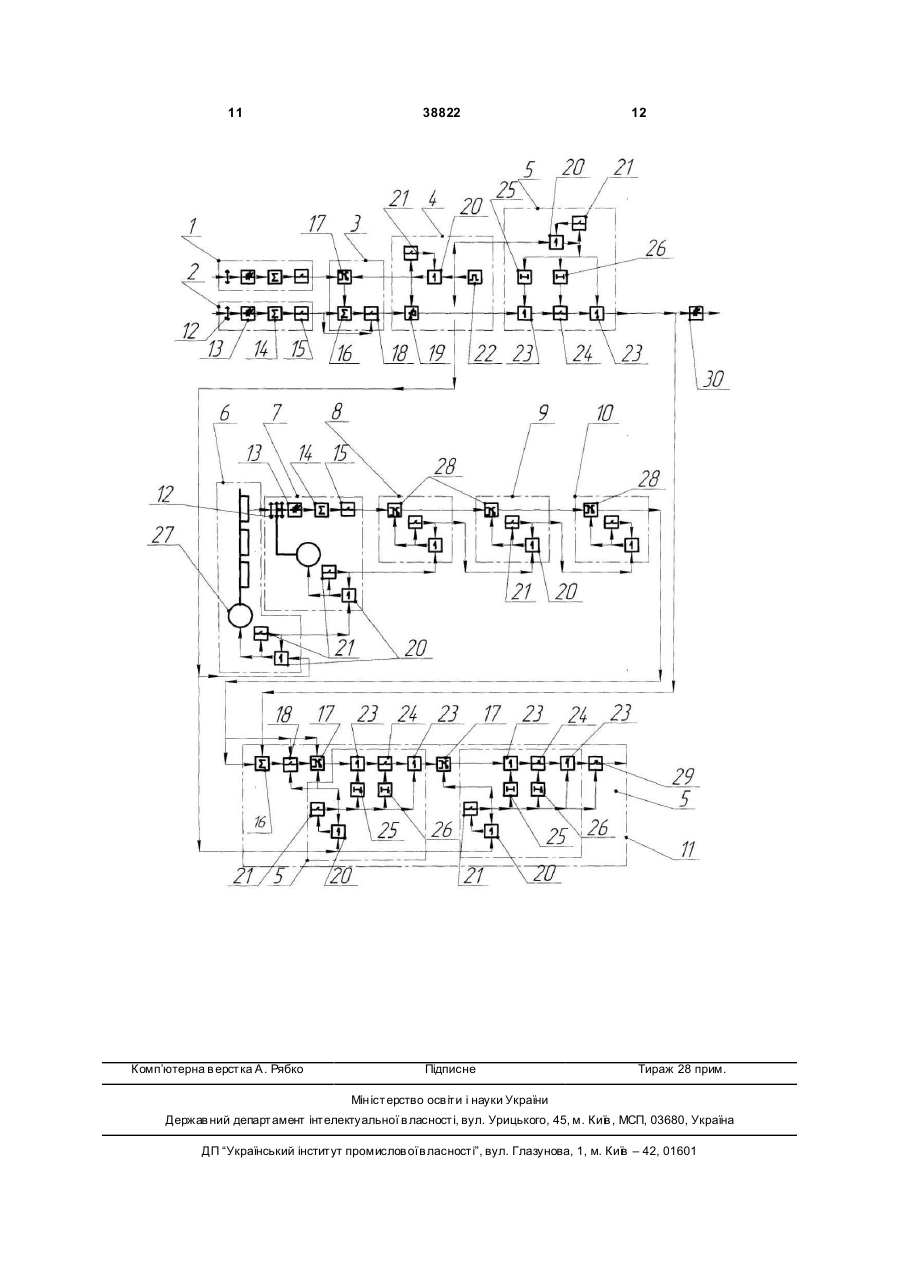
Спосіб виділення зображення, у якому зображення об'єкта проектують на фотодіодну матрицю, на виході якої одержують відеосигнал у вигляді набору значень, кожне з яких є сигналом осередку фотодіодної матриці, який відрізняється тим, що зазначений світловий потік другим проекційним об'єктивом проектують на другу фотодіодну матрицю, далі кожний відеосигнал перетворюють у сигнал ліній зображення, для чого величину кожного значення відеосигналу блоком електронних матриць порівнюють (вирахуванням) з величиною кожного сусіднього значення відеосигналу, при величині різниці більше граничного рівня блоком електронних ключів пропускають зазначені значення сигналу, при цьому величина пропущених значень сигналу однакова й вона дорівнює заданій величині (значень сигналу ліній зображення), далі визначають зрушення кожної точки ліній зображення другого об'єктива відносно відповідних точок ліній зображення першого об'єктива, що відпо U 2 (19) 1 3 38822 При прозорості всіх елементів матриці розпізнавана фігура ідентична еталонній фігурі. При частковій прозорості всіх елементів розпізнавана фігура має відмінності від еталонної фігури. Докладніше дивитися опис винаходу до авторського посвідчення СРСР №842871. Недоліком відомого способу розпізнавання зображення є відсутність можливості його реалізації при близьких значеннях яскравості й кольору об'єкта та обстановки, наприклад при недостатній освітленості об'єкта й обстановки в нічний час доби, або в замкнутому приміщенні при відсутності освітлення, у лісі, у заростях чагарнику, у житловій або промисловій зонах, у зонах суцільного або аномального задимлення, запилення, пожежі, тумана. Наслідком зазначеного недоліку є відсутність можливості застосування пристроїв технічного зору. Застосування оптики, що просвітлює, або приладів нічного візування, які використають інфрачервоне випромінювання, нічого істотного не дає, тому що об'єкт одночасно з обстановкою збільшує свою яскравість, а пристрій технічного зору також як і око людини й тварин сприймають його як один об'єкт, аналогічно картині. Загальновідомий спосіб визначення відстані до об'єкта (точки), у якому відстань до об'єкта (точки) дорівнює відношенню відстані між двома опорними точками до тангенса кута між напрямками з гіпотенузи на катет. В основу корисної моделі поставлене завдання оптимізації Способу виділення зображення, у якому зображення об'єкта проектують на фотодіодну матрицю, на виході якої одержують відеосигнал у вигляді набору значень, кожне з яких є сигналом осередку фотодіодної матриці, завдяки тому, що зазначений світловий потік другим проекційним об'єктивом проектують на другу фотодіодну матрицю, далі кожний відеосигнал перетворять у сигнал ліній зображення, для чого величину кожного значення відеосигналу блоком електронних матриць порівнюють (вирахуванням) з величиною кожного сусіднього значення відеосигналу, при величині різниці більше граничного рівня блоком електронних ключів пропускають зазначені значення сигналу, при цьому величина пропущених значень сигналу однакові й вони дорівнюють заданій величині (значень сигналу ліній зображення), далі визначають зрушення кожної точки ліній зображення другого об'єктива щодо відповідних точок ліній зображення першого об'єктива, що відповідно визначенню відстаней від об'єктивів до відповідних точок існуючих фігур, для чого перемикають контакти виходу комутатора з кожної лінії контактів входу, які розташовані перпендикулярно напрямку між осями об'єктивів, на контакти паралельних їм ліній входу в напрямку від осі другого об'єктива на вісь першого об'єктива, при цьому блоком електронних матриць порівнюють (вирахуванням ) отримані величини значень сигналу ліній зображення другого об'єктива з величинами відповідних значень сигналу ліній зображення першого об'єктива, при цьому, при величині різниці рівної нулю значення сигналу ліній зображення першого об'єктива, блоком електронних ключів пропуска 4 ють, а при величині різниці більшої нуля зазначеним значення блоком електронних ключів не пропускають, далі величини пропущених значень блоком регульованих індивідуальних підсилювачів змінюють на величини пропорційно моментам часу пропуску значень сигналу, що задають генератором імпульсів, при цьому величини значень отриманого сигналу ( які відповідні лініям зображення першого об'єктива) на светодіодній матриці мають яскравість, що збільшується залежно від зменшення відстані від точок ліній фігур до першого об'єктива, чим забезпечують виділення об'єктів по величині значень сигналу, залежно від відстані до об'єкта, і за рахунок цього розширені технічні можливості пристроїв технічного зору. Поставлене завдання оптимізації Способом виділення зображення, у якому зображення об'єкта проектують на фотодіодну матрицю, на виході якої одержують відеосигнал у вигляді набору значень, кожне з яких є сигналом осередку фотодіодної матриці, завдяки тому, що зазначений світловий потік другим проекційним об'єктивом проектують на другу фотодіодну матрицю, далі кожний відеосигнал перетворять у сигнал ліній зображення, для чого величину кожного значення відеосигналу блоком електронних матриць порівнюють (вирахуванням) з величиною кожного сусіднього значення відеосигналу, при величині різниці більше граничного рівня блоком електронних ключів пропускають зазначені значення сигналу, при цьому величина пропущених значень сигналу однакові й вони дорівнюють заданій величині (значень сигналу ліній зображення), далі визначають зрушення кожної точки ліній зображення другого об'єктива щодо відповідних точок ліній зображення першого об'єктива, що відповідно визначенню відстаней від об'єктивів до відповідних точок існуючих фігур, для чого перемикають контакти виходу комутатора з кожної лінії контактів входу, які розташовані перпендикулярно напрямку між осями об'єктивів, на контакти паралельних їм ліній входу в напрямку від осі другого об'єктива на вісь першого об'єктива, при цьому блоком електронних матриць порівнюють (вирахуванням) отримані величини значень сигналу ліній зображення другого об'єктива з величинами відповідних значень сигналу ліній зображення першого об'єктива, при цьому, при величині різниці рівної нулю значення сигналу ліній зображення першого об'єктива, блоком електронних ключів пропускають, а при величині різниці більшої нуля зазначеним значення блоком електронних ключів не пропускають, далі величини пропущених значень блоком регульованих індивідуальних підсилювачів змінюють на величини пропорційно моментам часу пропуску значень сигналу, що задають генератором імпульсів, при цьому величини значень отриманого сигналу (які відповідні лініям зображення першого об'єктива) на світлодіодній матриці мають яскравість, що збільшується залежно від зменшення відстані від точок ліній фігур до першого об'єктива. Спосіб виділення зображення об'єкта реалізується в Пристрої розпізнавання зображення. 5 38822 Корисна модель пояснюється блок-схемою, на котрому показана структура Пристрою розпізнавання зображення. Пристрій розпізнавання зображення містить канали - 1, 2 сигнали ліній зображення, канал - 3 сигнали зсуву зображення, канал - 4 зміни величин значень сигналу, канал - 5 запам'ятовування сигналу, канал - 6 вибору еталонної фігури, канал - 7 зміни масштабу зображення, канал-8 зрушення зображення по осі X, канал - 9 зрушення зображення по осі Y, канал - 10 повороту зображення, субканал - 11 ототожнення зображення, у канали 1, 2 включені, проекційний об'єктив - 12, у фокальній площині якого розташована фотодіодна матриця - 13, кожний осередок фотодіодної матриці 13 подає сигнал, що відповідає значенню відеосигналу, на один із входів блоку - 14 електронних матриць, а на другий вхід зазначеної електронної матриці блоку - 14 подають значення відеосигналу із сусіднього осередку фотодіодної матриці - 13, на виході якої одержують величину значення сигналу відповідної різниці величин значень на двох входах, ви хід блоку - 14 електронних матриць з'єднаний із входом блоку електронних ключів - 15, блок - 15 електронних ключів виконаний з можливістю пропуску кожного значення сигналу із входу на виході, які більше заданої граничного рівня, вихід блоку - 15 ключів соответственен виходу каналу 1 (2) на якому одержують сигнал ліній зображення, вихід каналу - 1 з'єднаний з першим входом каналу - 3, а вихід каналу - 2 з'єднаний із другим входом каналу - 3, у канал - 3 включені блок - 16 електронних матриць, комутатор 17, блок електронних ключів - 18, перший вхід каналу-3 відповідний першому входу блоку - 16 електронних матриць, і входу блоку -18 електронних ключів, а другий вхід каналу-3 с відповідний входу комутатора - 17, вихід блоку - 18 електронних ключів відповідній виходу каналу - 3, другий вхід блоку - 16 електронних матриць з'єднаний з виходом комутатора - 17, вихід блоку - 16 електронних матриць з'єднаний з першим другим блоку - 18 електронних ключів, крім того керуючий вхід комутатора - 17 з'єднаний з виходом каналу - 3, комутатор - 17 виконаний з можливістю перемикання електродів виходу з одних електродів входу, які розташовані в лініях, перпендикулярних напрямку між осями об'єктивів - 12 на сусідні електроди входу. які розташовані по паралельних лініях, по напрямку з осі другого об'єктива - 12 на вісь першого об'єктива 12, при подачі на управляючий вхід комутатора 17 відповідних сигналів керування з керуючого виходу каналу - 4, блок - 18 ключів виконаний з можливістю пропуску сигналу із входу на вихід кожного індивідуального ключа, при подачі на другий індивідуальний вхід відповідного ключа сигналу, величина якого більше граничного рівня, при подачі на перший індивідуальний вхід блоку - 18 величини сигналу рівного нулю, у канал - 4 включені, блок - 19 електронних підсилювачів, суматор - 20, електронний ключ - 21, формувач імпульсів 22, вхід блоку - 19 електронних підсилювачів о відповідний входу, каналу - 4, а вихід блоку - 19 електронних підсилювачів с відповідний виходу каналу - 4, вихід каналу - 4 з'єднаний із входом 6 каналу - 5 другий вихід каналу - 4 з'єднаний з керуючими входами каналу - 3, каналу - 5, каналу 6, каналу - 11, формувач імпульсів - 22 з'єднаний із входом суматора - 20, вихід суматора - 20 з'єднаний із входом ключа - 21 із керуючим входом блоку - 19 регульованих електронних підсилювачів, суматор - 20 виконаний з можливістю набору величини суми величин імпульсів, які подані на вхід суматора - 20, з одержанням величини набраної суми на виході суматора - 20 у вигляді безперервного сигналу, зі скиданням набраної суми до нуля по сигналі керування, що поданий на керуючий вхід суматора - 20 з виходу ключа - 21, ключ - 21 виконаний з можливістю пропуску сигналу, при величині сигналу вище граничного рівня, блок - 19 підсилювачів виконаний з можливістю зміни величини сигналу на кожному індивідуальному виході по сигналі керування, що поданий на індивідуальний керуючий вхід блоку - 19 електронних підсилювачів на величину відповідну значенню сигналу суми з виходу суматора-20 який поданий на керуючий вхід, крім того, вихід формувача імпульсів 22, з'єднаний із входом суматора - 20, у канал - 5 включений перший блок - 23 суматорів, ви хід якого з'єднаний із входом блоку - 24 електронних ключів, вихід блоку - 24 електронних ключів з'єднаний із входом другого блоку - 23 суматорів, вихід другого блоку - 23 суматорів відповідний виходу каналу - 5, керуючий вхід першого блоку - 23 суматорів з'єднаний з виходом суматора - 20 каналу - 5 через лінію - 25 затримки сигналу, а керуючий вхід блоку - 24 ключів з'єднані з виходом Суматра - 20 каналу-5 через іншу линові затримки - 26 сигналу, час затримки якої менше чим у лінії - 25 затримки, а керуючий вхід другого блоку - 23 суматорів з'єднаний з виходом суматора - 20 каналу - 5 безпосередньо, крім того в каналі - 5 розташований ключ - 21 вихід якого з'єднаний з керуючим входом суматора - 20 каналу - 5, вхід ключа - 21 з'єднаний з виходом суматора - 20, вхід суматора - 20 каналу - 5 з'єднаний з другим виходом каналу - 4, у канал - 6 вибору еталонної фігури включений лінійний кроковий двигун з набором зображень еталонних фігур-27, які закріплені на штоку лінійного крокового двигуна, керування вибором-переміщенням еталонних фігур - 27 здійснено суматором - 20 разом із ключем - 21, при цьому на вхід суматора - 20 каналу - 6 поданий сигнал з другого виходу каналу - 4, виділена каналом-6 еталонна фігура - 27 оптично пов'язана із проекційним об'єктивом - 12 каналу - 7 зміни масштабу, у якому фотодіодна матриця - 13 розташована у фокальній площині проекційного об'єктива - 12, блок - 14 електронних матриць, і блок - 15 ключів а також суматор - 20 із ключем – 21, з можливістю керування лінійним кроковим двигуном для переміщення оптичних елементів проекційного об'єктива - 12 із внутрішньою зміною величини масштабу зображення з виходу суматора - 20 каналу - 7, керуючий вхід суматора-20 каналу-7 з'єднаний з виходом ключа 21 каналу-7, вихід блоку-15 електронних ключів каналу-7 відповідний виходу каналу - 7, що з'єднаний із входом каналу-8 переміщення зображення по осі О-Х, у канал - 8 включений комутатор - 28 і суматор - 20 з ключем - 21, суматор - 20 з ключем 7 38822 21 з'єднані аналогічно, як і в каналах - 4, 5, якими здійснюють керування комутатором - 28, вихід комутатора - 28 відповідний виходу каналу - 7, що з'єднаний із входом каналу - 9, пристрій якого ідентичний каналу - 8, розходження якого таке, що по керуючих сигналах суматора - 20 у каналі - 8 здійснене перемикання комутатора - 28 електродів виходу. які розташовані по лініях - X, а в канапі - 9 по лініях - Y, які перпендикулярні лініям - X, у каналі - 10 здійснений поворот електродів виходу з одних електродів входу, які розташовані по радіальних лініях напрямку на інші електроди входу, які розташовані також на радіальних лініях напрямку, при цьому вхід суматора - 20 каналу - 10 з'єднаний з виходом суматора - 20 каналу - 9, вхід суматора-20 каналу - 9 з'єднаний з виходом суматора - 20 каналу - 8, вхід суматора - 20 каналу - 8 з'єднаний з виходом суматора - 20 каналу - 7, а вхід суматора - 20 каналу - 7 з'єднаний з виходом суматора - 20 каналу - 6, у канал - 11 включені, блок - 16 електронних матриць, входи якого відповідні входам каналу - 11, вихід якого з'єднані із входом блоку - 18 ключів, вихід блоку - 18 ключів з'єднаний із входом першого комутатора - 17 каналу - 11, керуючий вхід блоку - 18 ключів з'єднаний із другим входом блоку - 16 електронних матриць, вихід першого комутатора - 17 з'єднаний з першим каналом - 5 у каналі - 11, вихід зазначеного каналу - 5 у каналі - 11 з'єднаний із входом другого комутатора - 17, який з'єднаний із входом другого каналу - 5 у каналі - 11, вихід другого каналу 5 у каналі - 11 з'єднаний із входом ключа - 29, перший вхід каналу - 11 з'єднаний з виходом каналу 5, а другий вхід - з виходом каналу - 10, крім того вихід каналу - 5 з'єднаний зі світлодіодною матрицею - 30. Пристрій технічного зору працює в такий спосіб Проекційні об'єктиви - 12 будують зображення об'єкта у своїх фокальних площинах, у яких розташовані фотодіодні матриці - 13. На виході кожної фотодіодної матриці - 13 одержують відеосигнал, величина кожного значення якого відповідна світловому потоку, що попадає на відповідний осередок фотодіодної матриці - 13. Відеосигнал подають на блок - 14 електронних матриць, на виході якого одержують попередній сигнал ліній зображення, величини значень яких різні, залежно від яскравості фігур, а після блоку - 15 ключів величини значень однакові. При цьому сигнал ліній зображення каналу - 1 відрізняється від сигналу ліній зображення каналу - 2, тому що в каналі - 2 він відповідає зображенню зміщеному щодо зображення в каналі - 1. Сигнал ліній зображення каналу - 1 подають наперший вхід блоку -16 електронних матриць каналу - 3. На другий вхід блоку - 16 електронних матриць каналу-3 подають сигнал ліній зображення каналу - 3, через комутатор - 17 каналу - 3. Комутатор - 17 каналу - 3 змінює сигнал ліній зображення каналу - 2 так, що це відповідно переміщенню зображення у фокальній площині проекційного об'єктива - 12 каналу - 2 у напрямку від осі проекційного об'єктива - 12 каналу - 2 на вісь проекційного об'єктива - 12 каналу - 1. При цьому, блоком-16 електронних матриць каналу-3 здійснюється вирахування величин кожного зна 8 чення сигналу ліній зображення каналу - 1 з величини відповідного значення сигналу ліній зображення каналу - 2. Якщо величини відповідних значень рівні що відповідно точці лінії зображення на фотодіодній матриці - 13 у каналі - 1 і в каналі 2, то величина відповідного значення сигналу на другому ви ході блоку - 16 електронних матриць каналу - 3 рівняється нулю, і блоком - 18 ключів каналу - 3 пропускають значення сигналу з першого входу каналу - 3 на вхід блоку - 19 електронних підсилювачів каналу - 4, а якщо величини двох сигналів різні, то блоком - 18 ключів каналу - 3 не пропускають, крім того якщо величини двох сигналів рівняють нулю, що відповідно ділянці зображення на якому відсутні лінії зображення, те відповідний ключ блоку-18 ключів відкритий, але на його вході сигнал відсутній. Таким чином, каналом - 3 здійснюється зміна сигналу ліній зображення каналу - 2 це відповідно переміщенню зображення каналу - 2 на зображення в каналі - 1, по величині переміщення визначають зрушення кожної точки ліній зображення каналу - 2 щодо відповідної точки каналу - 1, а це відповідно відстані від проекційного об'єктива - 12 каналу - 2 до кожної точки лінії фігур. Це є фактично обробкою об'ємного зображення. Сигнал з виходу каналу-3 подають на вхід каналу - 4. У каналі - 4 здійснюють зміна величин сигналу залежно від порядку надходження сигналу. Блоком - 19 підсилювачів збільшують значення сигналу, відповідно до асових інтервалів надходження сигналу на вхід каналу - 4. На початку пропускаються значення сигналу, які відповідні найбільш віддаленим точкам об'єктів, далі точкам об'єктів, які менш віддалені, а потім точкам об'єктів, відстань до яких по шкалі градації зменшується, при цьому величини відповідних значень у міру зменшення відстані до об'єктів збільшуються. . Крім того канал -4 здійснює керування роботою всього пристрою технічного юру формувачем імпульсів - 22. Формувач імпульсів - 22 подає сигнал у вигляді імпульсів на вхід суматора - 20, на виході суматора - 20 одержують безперервний сигнал величина якого рівняється сумі величин імпульсів сигналу на вході суматора - 20. Сигнал з виходу суматора - 20 подають на вхід ключа - 21. При величині сигналу на вході ключа - 21 вище певного граничного рівня ключ - 21 пропускає сигнал зі свого входу на свій вихід. При цьому сигнал із входу ключа - 21 попадає на керуючий вхід суматора 20, що скидає набрану суму величини сигналу до нулю. У такий спосіб при наборі величини суми імпульсів сигналу до певної величини суми здійснюється скиданням суми до нулю з подальшим повторним набором суми, працюючи спільно суматор - 20 із ключем - 21 в імпульсному режим здійснюють перекомутацію комутаторів і відмикання ключів і блоків ключів, скидання сум суматорів і блоків суматорів, а також керуванням посилення блоку підсилювачів. Сигнал з виходу каналу - 4 подають на вхід каналу - 5. У каналі - 5 сигнал запам'ятовують. Для чого сигнал з виходу блоку - 19 підсилювачів подають на вхід першого блоку - 23 суматорів, на виході якого одержують безперервний сигнал. Сигнал з виходу першого блоку - 23 суматорів пропускають блоком - 24 ключів на вхід 9 38822 другого блоку - 23 суматорів по імпульсу керування поданому на керуючий вхід блоку - 24 ключів. Для скидання блоками - 23 суматорів раніше набраних значень у каналі-5 здійснюють по імпульсі керування з виходу суматора - 20 з ключем - 21, що подають на керуючий вхід першого блоку - 23 суматорів, через лінію затримки - 25, а на керуючий вхід блоку - 24 ключів через лінію затримки 26, і на упраляющий вхід др угого блоку - 23 суматорів безпосередньо. Це забезпечує спочатку скидання попереднього сигналу другим блоком - 23 суматорів, з подальшим пропущенням поточного сигналу з першого блоку - 23 суматорів через блок - 24 ключів з закриттям блоку - 24 ключів і подальшим скиданням першим блоком - 23 суматорів поточного сигналу, і з набором першим блоком 23 суматорів нового сигналу. У такий спосіб на виході каналу-5 одержують сигнал у вигляді змінного в часі набору імпульсів різної амплітуди які відповідні лініям зображення першого об'єктива, які мають різну яскравість, що збільшується при зменшенні відстані до проекційних об'єктивів - 12 каналів - 1, 2, поданого на світлодіодну матрицю 30. Для отутодження виділених каналами - 1, 2, 3, 4, 5 фігур сигнал з виходу каналу - 5 подають на перший вхід каналу - 11. На другий вхід каналу 11 подають еталонний сигнал, що одержують у каналах - 6, 7, 8, 9, 10. У каналі - 6 суматором - 20 із ключем - 21 управляють переміщенням штока крокового двигуна з вибором еталонних фігур - 27 які переміщають залежно від величини сигналу на виході суматора - 20. Обрана каналом-6 еталонна фігура - 27 оптично пов'язана із проекційним об'єктивом - 12 каналу - 7. У каналі - 7 змінюють масштаб зображення еталонної фігури - 27, для чого управляють переміщенням крокового двигуна оптичних елементів об'єктива-12, що викликає оптичну зміну розмірів еталонної фігури - 27, з якого фотодіодною матрицею - 13 каналу - 7 і блоком електронних матриць - 14 каналу - 7 формують відеосигнал, що змінюють блоком - 15 ключів на виході якого одержують сигналу ліній зображення еталонної фігури - 27. У каналі - 8 по сигналах керування із суматора - 20 із ключем - 21 каналу -7 здійснюють керування комутатором - 28, аналогічно керуванню комутатором - 16 у каналі - 3. При цьому зміна сигналу в каналі - 8 рівнозначно кроковому переміщенню еталонної фігури - 27 уздовж оси О-Х, у каналі - 9 - переміщенню уздовж oci - Y, а в каналі – 10 - кроковому повороту еталонної фігури - 27 навколо оси проекційного об'єктива - 12 каналу - 7. Отутоджнення сигналу фігури з сигналом еталонної фігури - 27 здійснюють каналом - 11 у якому сигнал фігури, що, подають на один вхід блоку електронних матриць - 16 каналу - 11 а на другий вхід цього блоку електронних матриць - 16 подають сигнал еталонної фігури - 27 з виходу каналу - 10. На виході блоку електронних матриць 10 - 16 каналу - 11 одержують сигнал різниці у вигляді набору безперервних значень сигналу, кожне значення яких відповідно різниці величин сигналів, що перетвориться блоком - 18 ключів. Отриманий сигнал, що представляє набір значень певної величини, які відповідні набору амплітуд-значень, які розміщені в площині, по координатах як X так і Y, при перетворенні сигналу першим комутатором 17 значення сигналу відповідні набору сум амплітуд-значень сигналів, які розміщені по лініях Y причому кожне значення по лінії X відповідно сумі величин по відповідній лінії Y, що запам'ятовується першим каналом - 5 каналу - 11. Далі другим комутатором - 17 здійснюють визначення сумарної різниці значень, що запам'ятовують другим каналом - 5 каналу - 11. При цьому керування комутаторами - 17 здійснюється суматорами - 20 каналів - 5 каналу - 11. Величина сумарної різниці фіксується ключем - 29 каналу - 11, на виході якого одержують сигнал при сумарній різниці величини сигналу менше граничного рівня, при подачі на керуючий вхід ключа - 29 імпульсу від ключа - 21 другого каналу - 5 каналу - 11. Контроль за роботою здійснюють візуально по світлодіодній матриці - 30, на другу подають сигнал з виходу каналу - 5. У такий спосіб здійснюючи виділення ліній зображення об'єктів (предметів), які розташовані до об'єктивів ближче, чим інші предмети, які ідентифікуються як обстановка, по величині яскравості, що дуже зручно як для їхньої ідентифікації, так і для маневрування між ними транспортного засобу без їхньої ідентифікації. При цьому транспортний засіб може орієнтуватися в процесі свого руху по ключових орієнтирах-об'єктах, які розташовуються на шляху його руху, причому інформація про ці орієнтири може носити навіть загальний характер. Крім того представлений спосіб технічного зору є більш високого рівня, у порівнянні з відомими способами , що використають всі існуючі як біологічні об'єкти, такі як різні тварини й людина, так і відомі пристрої технічного зору. Крім цього представлений спосіб може бути використаний при будь-якому рівні освітленості, у тому числі й при незначній освітленості від малопотужного джерела світла або природного малопотужного джерела світла, наприклад світла зірок на небосхилі, або слабких відблисків на гладких поверхнях. Представлений Спосіб виділення зображення об'єкта може бути використаний для одержання голографічного зображення, у тому числі й у голографічному телебаченні. Застосування Способу виділення зображення дозволить виділяють всі об'єкти на з ображений за критерієм яскравості, котра залежить від відстані до об'єкта, чим спроститься конструкція пристрою й безвідмовність його роботи, у тому числі й при відсутності подібного еталонного зображення для ідентифікації об'єкта. 11 Комп’ютерна в ерстка А. Рябко 38822 Підписне 12 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for separation of image
Автори англійськоюChuhui Volodymyr Leonidovych
Назва патенту російськоюСпособ выделения изображения
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: G06K 9/00
Мітки: спосіб, виділення, зображення
Код посилання
<a href="https://ua.patents.su/6-38822-sposib-vidilennya-zobrazhennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб виділення зображення</a>
Спосіб виділення контуру зображення
Номер патенту: 29418
Опубліковано: 10.01.2008
Автори: Юкиш Сергій Васильович, Білинський Йосип Йосипович
МПК: G06K 9/64
Мітки: зображення, спосіб, контуру, виділення
Формула / Реферат:
Спосіб виділення контуру, який включає операцію згладжування за допомогою згортання з гауссіаном і обчислення градієнта зображення в вертикальному та горизонтальному напрямках за допомогою одного із операторів першої похідної, який відрізняється тим, що в ньому повторно виконують операцію згладжування з наступним виділенням точок перетину примежових кривих вхідного та зображення, отриманого в результаті повторного згладжування, для усунення...
Пристрій для визначення просторового зміщення зображення об’єкту по відношенню до еталону зображення
Номер патенту: 30433
Опубліковано: 15.11.2000
Автори: Рожков Сергій Олександрович, Храпливий Анатолій Петрович, Тимофеєв Констянтин Васильович, Тернова Тетяна Іванівна, Бражник Олександр Михайлович
Мітки: пристрій, просторового, еталону, зображення, зміщення, об'єкту, відношенню, визначення
Формула / Реферат:
1. Пристрій для визначення просторового зміщення зображення об'єкту по відношенню до еталону зображення, що містить послідовно розташовані прилад для знімання інформації, прилад для зберігання еталону, перетворювач Фур'є і прилад для обчислення кореляційної функції, відрізняючий тим, що він додатково містить два смугових фільтра, входи яких електрично зв'язані з перетворювачем сигналу зображення і сигналу еталону відповідно, а виходи...
Пристрій формування тепловізійного зображення
Номер патенту: 36856
Опубліковано: 10.11.2008
Автор: Кондратов Петро Олександрович
МПК: H04N 5/33
Мітки: тепловізійного, формування, зображення, пристрій
Формула / Реферат:
Пристрій формування тепловізійного зображення, що містить аналого-цифровий перетворювач, вхід якого є входом пристрою, N послідовно з'єднаних вузлів накопичення кадрів, у склад кожного з них входить блок пам'яті, вхід якого є входом цього вузла, а вихід - його першим виходом, суматор, вихід якого є виходом пристрою, який відрізняється тим, що у нього додатково введено у склад кожного з вузлів накопичення подільник сигналу із змінним...
Однорідне обчислювальне середовище для виділення фрагмента зображення в аналізі структури матеріалів
Номер патенту: 42483
Опубліковано: 15.10.2001
Автори: Кисіль Богдан Васильович, Стрямець Сергій Петрович
Мітки: фрагмента, виділення, аналізі, однорідне, обчислювальне, структури, матеріалів, зображення, середовище
Формула / Реферат:
1. Однорідне обчислювальне середовище для виділення фрагмента зображення в аналізі структури матеріалів, що має в своєму складі матрицю обчислювальних комірок (ОК) 1, блок координатної вибірки адреси 2, два шифратори 3, 4, вхід послідовного вводу даних D, керуючі входи завантаження даних (Зав.), тактових імпульсів (ТІ), вхід обнулення регістрів пристрою (R), та виходи: сигнал початку виділення фрагмента зображення (Р), закінчення обробки...
Оптоелектронний елемент матриці для виділення контуру зображення
Номер патенту: 31973
Опубліковано: 25.04.2008
Автори: Кожем'яко Володимир Прокопович, Тодорашко Наталія Іванівна, Васильєв Ігор Вікторович
МПК: G06K 9/36
Мітки: виділення, зображення, оптоелектронний, контуру, елемент, матриці
Формула / Реферат:
Оптоелектронний елемент матриці для виділення контуру зображення, що містить запам'ятовуючий елемент і фотоприймальний елемент, катод якого підключено до шини живлення, елемент АБО і два випрямляючих елементи, а запам'ятовуючий елемент включає резистор, оптично зв'язаний фотодіод та світлодіод, відповідно катод і анод яких з'єднано з шиною живлення, а катод світлодіода є виходом оптоелектронного елемента, транзистор, колектор якого з'єднано з...
Попередній патент: Універсальний тепловий апарат з непрямим обігрівом
Наступний патент: Спосіб виготовлення протиугона пружинного до залізничних рейок
Випадковий патент: Фармацевтична композиція із контрольованим виділенням розчинного tnf-a