Система керування технологічним об’єктом
Номер патенту: 41820
Опубліковано: 10.06.2009
Автори: Шавкун В'ячеслав Михайлович, Бабічева Ольга Федорівна, Єсаулов Сергій Михайлович, Бабаков Сергій В'ячеславович, Савостьян Олексій Сергійович
Формула / Реферат
Система керування технологічним об'єктом, що містить послідовно з'єднані формувач тестового сигналу, перший суматор, другий суматор, регулятор, виконавчий пристрій і об'єкт керування із запізнюванням, вихід якого з'єднаний з другим входом першого суматора, а також послідовно з'єднані модель об'єкта керування без запізнювання, модель транспортного запізнювання і третій суматор, вихід якого з'єднаний з другим входом другого суматора, вхід моделі об'єкта керування без запізнювання з'єднаний з виходом регулятора, а вихід - з другим входом третього суматора, другий вхід третього суматора з'єднаний з виходом моделі транспортного запізнювання, вихід першого суматора підключений до послідовно з'єднаних блоків обчислення помилки компенсації часу запізнювання і перебудови моделі транспортного запізнювання, вихід блока перебудови моделі транспортного запізнювання з'єднаний з другим входом моделі транспортного запізнювання, а вихід блока обчислення помилки компенсації з'єднаний з входом формувача тестового сигналу, яка відрізняється тим, що в неї додатково введені послідовно з'єднані диференціатор і блок перебудови тестового сигналу, вихід якого з'єднаний з другим входом формувача тестового сигналу і другим входом блока обчислення помилки компенсації часу запізнювання, а його другий вхід - з виходом виконавчого пристрою, вихід об'єкта керування із запізнюванням з'єднаний з входом диференціатора, з послідовно з'єднаним інтегратором і блоком перебудови моделі об'єкта керування без запізнювання, вихід якого з'єднаний з другим входом моделі об'єкта керування без запізнювання, а вихід диференціатора з'єднаний з другим входом блока перебудови моделі об'єкта керування без запізнювання.
Текст
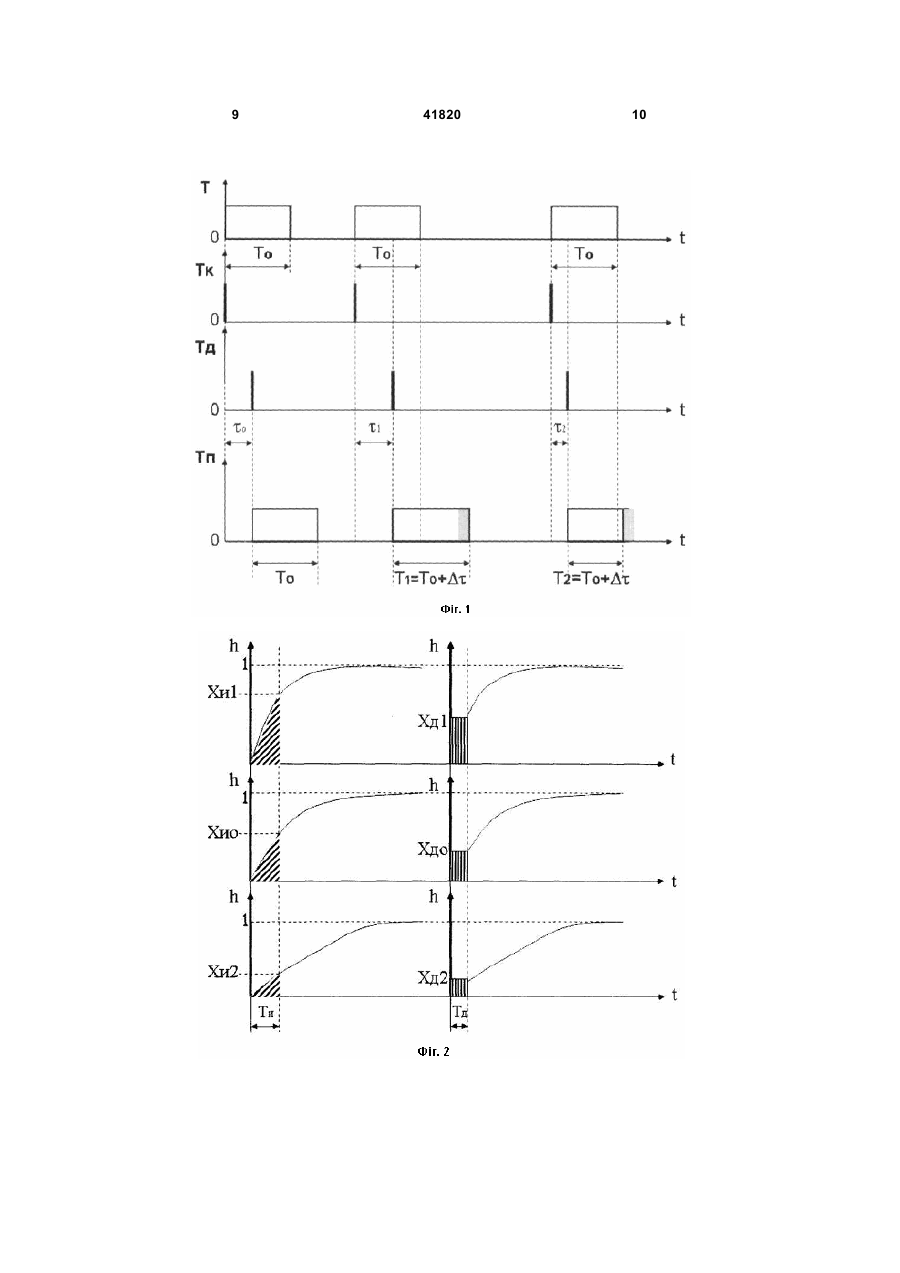
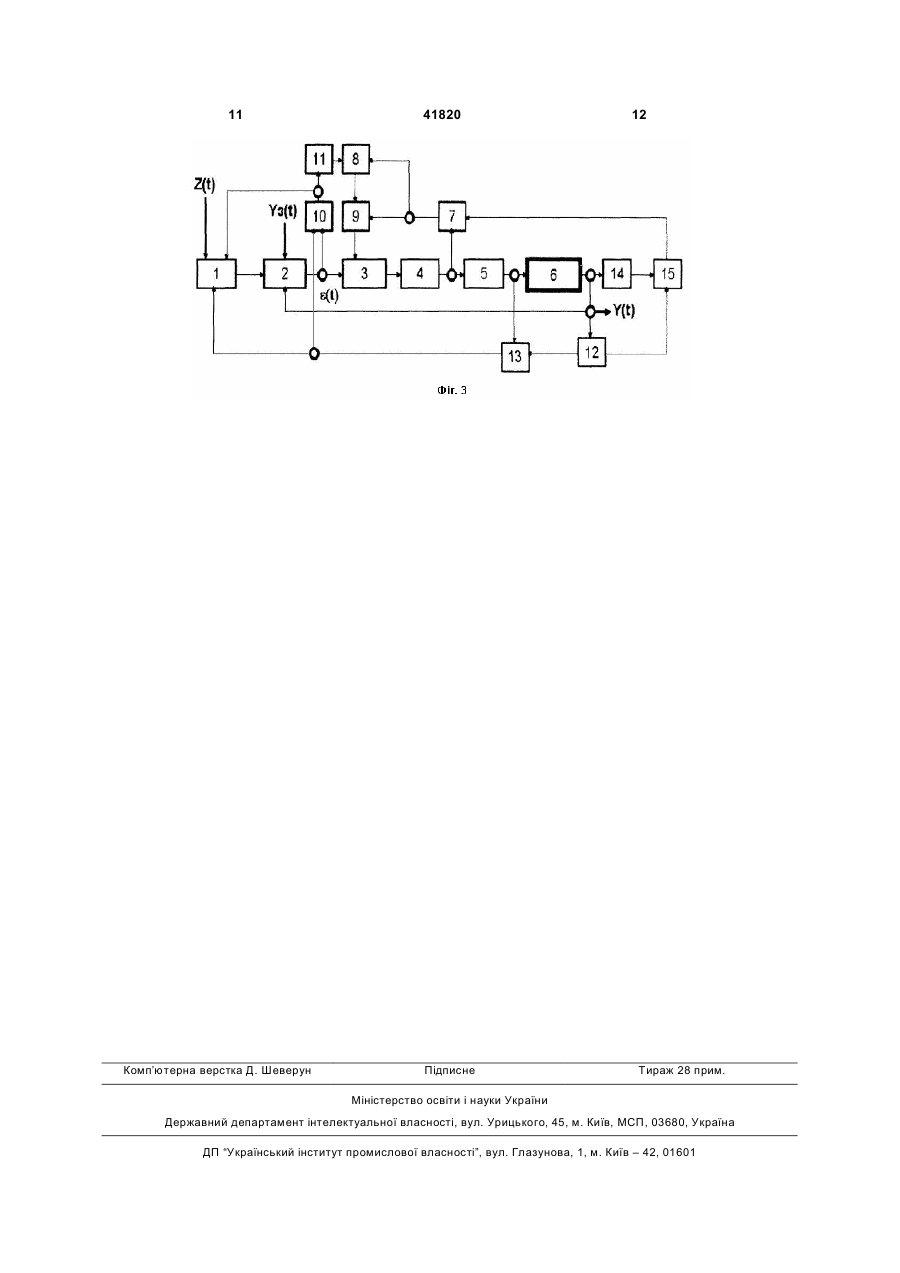
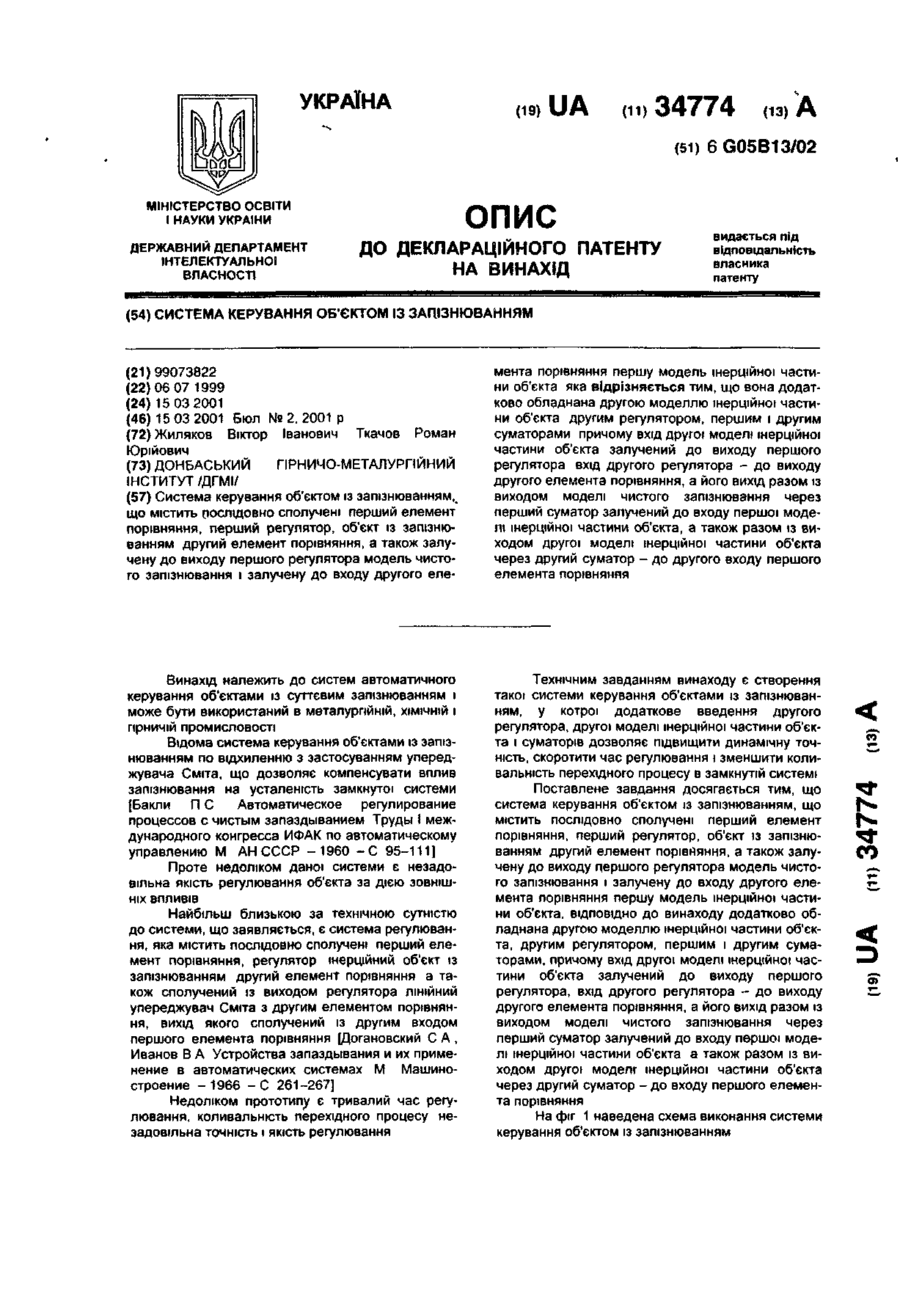
Система керування технологічним об'єктом, що містить послідовно з'єднані формувач тестового сигналу, перший суматор, другий суматор, регулятор, виконавчий пристрій і об'єкт керування із запізнюванням, вихід якого з'єднаний з другим входом першого суматора, а також послідовно з'єднані модель об'єкта керування без запізнювання, модель транспортного запізнювання і третій суматор, вихід якого з'єднаний з другим входом другого суматора, вхід моделі об'єкта керування без запізнювання з'єднаний з виходом регулятора, а вихід - з другим входом третього суматора, другий вхід третього суматора з'єднаний з виходом моделі транспортного запізнювання, вихід першо U 2 (19) 1 3 блоку порівняння [SU № 1674060, МПК G 05 В 13/00, 1991]. До недоліків такої системи можна віднести те, що система повністю компенсує запізнювання тільки за умови відповідності часу запізнювання об’єкта керування параметру моделі запізнювання. При варіюванні динамічних властивостей об’єкта і транспортного запізнювання система керування функціонує з істотною динамічною помилкою. Відома система керування, що містить послідовно з’єднані перший суматор, вимірник розбіжності, регулятор, виконавчий механізм і об’єкт керування, а також послідовно з’єднані модель об’єкту керування без запізнювання, модель чистого запізнювання, блок проділу, другий суматор, вихід якого з’єднаний з входом першого суматора, а другий вхід - з виходом моделі об’єкта керування без запізнювання, вихід виконавчого механізму з’єднаний з входом моделі об’єкта керування без запізнювання, а вихід об’єкта керування підключений до другого входу блоку поділу [SU № 1112342, МПК G 05 В 11/01, 1984]. До недоліків такої системи можна віднести те, що при значних змінах динамічних властивостей об’єкта і транспортного запізнювання модель об’єкта керування стає неадекватною, у зв’язку з чим якість процесу регулювання супроводжується істотним зростанням динамічної помилки. Найбільш близькою за технічною суттю до пропонованої системи є система керування об’єктом з транспортним запізнюванням, що містить послідовно з’єднані перший суматор, другий суматор, регулятор, виконавчий пристрій і об’єкт керування із запізнюванням, вихід якого з’єднаний з другим входом першого суматора, а також послідовно з’єднані модель об’єкта без запізнювання, модель транспортного запізнювання, третій суматор, вихід регулятора з’єднаний з входом моделі об’єкта керування без запізнювання, вихід якої з’єднаний з другим входом третього суматора, а вихід третього суматора з’єднаний з другим входом другого суматора, вихід першого суматора з’єднаний з послідовно з’єднаними блоком обчислення помилки компенсації і блоком перебудови моделі транспортного запізнювання, вихід якої підключений до другого входу моделі транспортного запізнювання, а вихід блоку обчислення помилки компенсації підключений до формувача тестового сигналу, вихід якого з’єднаний з другим входом першого суматора [RU № 94031451, MПK G05B 13/02, 1996]. Недоліком даної системи є те, що вона не враховує зміни динамічних властивостей об’єкта і в певних умовах не повністю компенсує транспортне запізнювання, у зв’язку з чим регульована величина характеризується значною динамічною помилкою, а за певних умов система стає нестійкою. В основу корисної моделі поставлено завдання удосконалення системи керування технологічним об’єктом, в якій за рахунок введення нових конструктивних елементів враховуватимуться динамічні властивості об’єкта, що змінюються, і компенсуватиметься змінне транспортне запізнювання, що забезпечить допустиму динамічну помилку 41820 4 системи керування і її стійкість при варіюванні параметрів об’єкта в широких межах, а також сприяє підвищенню точності ведення процесу регулювання при отриманні миючого розчину. Поставлене завдання досягається тим, що в систему керування технологічним об’єктом, що містить послідовно з’єднані формувач тестового сигналу, перший суматор, другий суматор, регулятор, виконавчий пристрій і об’єкт керування із запізнюванням, вихід якого з’єднаний з другим входом першого суматора, а також послідовно з’єднані модель об’єкта керування без запізнювання, модель транспортного запізнювання, третій суматор, вихід якого з’єднаний з другим входом другого суматора, вхід моделі об’єкта керування без запізнювання з’єднаний з виходом регулятора, а вихід з другим входом третього суматора, другий вхід третього суматора з’єднаний з виходом моделі транспортного запізнювання, вихід першого суматора підключений до послідовно з’єднаних блоків обчислення помилки компенсації часу запізнювання і перебудови моделі транспортного запізнювання, вихід блоку перебудови моделі запізнювання з’єднаний з другим входом моделі транспортного запізнювання, а вихід блоку обчислення помилки компенсації з’єднаний з входом формувача тестового сигналу, згідно з корисною моделлю, додатково введені послідовно з’єднані диференціатор і блок перебудови тестового сигналу, вихід якого з’єднаний з другим входом формувача тестового сигналу і другим входом блоку обчислення помилки компенсації часу запізнювання, а його другий вхід – з виходом виконавчого пристрою, вихід об’єкта керування із запізнюванням з’єднаний з входом диференціатора і з послідовно з’єднаним інтегратором і блоком перебудови моделі об’єкта керування без запізнювання, вихід якого з’єднаний з другим входом моделі об’єкта керування без запізнювання, а вихід диференціатора з’єднаний з другим входом блоку перебудови моделі об’єкта керування без запізнювання. Система забезпечує керування технологічним об’єктом з часом транспортного запізнювання t шляхом компенсації відхилення e(t) вихідної ординати Y(t) від її заданого значення Yз(t): e( t ) = Y( t ) - Yз( t ) . (1) Оскільки величина Y(t) залежить від динамічних властивостей Y1(t) \ запізнювання Y2(t) об’єкта керування Y( t ) = f [ Y1( t ), Y2 ( t )] , (2) то при формуванні керуючої величини враховуються зміни цих чинників. Оцінку впливу змінних Y1(t) і Y2(t) виконуємо за допомогою періодичного тестування об’єкта керування. Реалізація режиму тестування об’єкта здійснюється за допомогою періодичних тестових сигналів Т заданої тривалості, контролюючи які, можна визначати параметри технологічного об’єкта і використовувати їх для визначення Y(t) і Y2(t). Період тестового сигналу Т вибираємо таким, щоб можна було визначити відхилення реального часу запізнювання t об’єкта від нормованого значення і компенсувати виникаючу невідповідність. 5 Оскільки заданий період Т0 тестового сигналу повинен бути узгоджений з реальним часом транспортного запізнювання об’єкта, в системі використаний блок перебудови тестового сигналу, який точно визначає транспортне запізнювання об’єкта керування за сигналами від виконавчого пристрою ТК на вході об’єкта керування і диференціатора ТД, підключеного до виходу об’єкта керування, і формує період ТП з урахуванням виявленого відхилення часу транспортного запізнювання t від її нормованої величини t0. Отримані дані дозволяють ідентифікувати запізнювання перехідної характеристики h1(t) об’єкта керування вигляду h1( t ) = 1( t - t) , (3) де t - реальний час, що використовується для коректування моделі транспортного запізнювання об’єкта. На Фіг. 1 ілюструється процес перебудови періоду Т0 в параметр ТП при відхиленнях нормованого значення запізнювання t0 у відомому інтервалі: t1 ³ t0 ³ t2 ; (4) T1 ³ Tно ³ T2 , (5) де t1, t0, t2 - максимальне, мінімальне і нормоване значення часу запізнювання об’єкта, відповідно; Т1, Тно, Т2 - максимальний, мінімальний і нормований періоди тестового сигналу, відповідно. Формування скоректованого періоду ТП тестового сигналу від розбіжності Dt: Dt = t - t0 ; (6) TP = T0 + Dt , (7) дозволяє врахувати отримані дані в моделі запізнювання об’єкта керування, виконати компенсацію цього параметра і усунути вплив величини Y1: Y1( t ) = f ( t) , (8) залежної від t. При формуванні скоректованого періоду т використовується масштабування величин t та t0 і враховується взаємозв’язок постійної часу реального об’єкта керування Тр з часом транспортного запізнювання, щоб виключити реалізацію умови Dt > 2Tp , (9) коли система стає нестійкою. Контроль динамічних властивостей об’єкта керування здійснюється шляхом аналізу інтегральної ХИ: 1 XИ = ydt TИ , (10) і диференціальної ХД складових dy XД = Т Д dt , (11) де ТИ - час інтеграції; ТД - час диференціювання перехідного процесу реального об’єкта, при реалізації тестового режиму; у - вихідна величина; t - час. Оскільки величини ТИ і ТД при визначенні ХИ і XД вибираються постійними, то, очевидно, що при ò 41820 6 відхиленні перехідного процесу в реальному об’єкті керування від аналогічного в нормованих умовах спостерігатиметься варіювання значень ХИ і XД в деяких межах: DХИ=ХИ-ХИО; (12) DХД=ХД-ХДО, (13) де ХИО, XДО - інтегральна і диференціальна компоненти тестового перехідного процесу за нормованими умовами експлуатації технологічного об’єкта; DХИ, DХД - відхилення інтегральної і диференціальної складових в реальних умовах в порівнянні з нормованими умовами експлуатації об’єкта. На Фіг. 2 наведені графіки різних перехідних характеристик h(t) об’єкта керування і ілюстрації формування DХИ, DХД, коли ХИ1>ХИО>ХИ2, (14) ХД1>ХДО>ХД2. (15) Величини DХИ і DХД використовують для ідентифікації перехідної характеристики h2 (t) об’єкта, наприклад, вигляду æ t ö ÷ h2 ( t ) = k p - expç ç Tp ÷ è ø , (16) де kp, Tp - коефіцієнт посилення і постійна часу реального об’єкта керування відповідно. Отримані параметри kр, Тр використовуються в системі керування для коректування моделі технологічного об’єкта без запізнювання, що сприяє усуненню помилки вихідної ординати об’єкта від Y2 (t): Y1( t ) = f ( DXИ , DХ Д ) , (17) пов’язаної з неадекватністю моделі об’єкта керування без транспортного запізнювання реальному технологічному об’єкта. Відмінні ознаки є істотними, оскільки нова сукупність введених блоків, сигналів і зв’язків дозволяє усунути динамічну помилку, обумовлену запізнюванням і змінними динамічними властивостями об’єкта керування, що досягається коректуванням моделі об’єкта, ідентифікована перехідна характеристика якої h(t) é t - tù h( t ) = k p - exp ê ú ê Tp ú ë û , (18) адекватна реальному об’єкту керування. На Фіг. 3 зображена функціональна схема системи керування, де Yз(t) - сигнал завдання; Z(t) збурююча дія; e(t) - помилка, викликана змінюваними транспортним запізнюванням, динамічними властивостями об’єкта та іншими збурюючими чинниками. Система керування технологічним об’єктом складається з послідовно з’єднаних формувача тестового сигналу 1, першого 2 і другого 3 суматорів, регулятора 4, виконавчого пристрою 5, об’єкта керування 6 із запізнюванням, вихід якого з’єднаний з другим входом суматора 2. До виходу регулятора 4 підключені послідовно з’єднані модель об’єкта керування без запізнювання 7, модель транспортного запізнювання 8 і третій суматор 9, другий вхід якого з’єднаний з виходом моделі об’єкта керування без запізнювання 7. Вхід 7 блоку 10 обчислень помилки часу запізнювання підключений до виходу першого суматора 2, а вихід з’єднаний з входами блоку 11 перебудови моделі транспортного запізнювання і формувача тестового сигналу 1. Вихід блоку 11 перебудови моделі транспортного запізнювання з’єднаний з другим входом моделі транспортного запізнювання 8. До виходу об’єкта керування 6 підключені послідовно з’єднані диференціатор 12 і блок 13 перебудови тестового сигналу, вихід якого з’єднаний з другим входом формувача тестового сигналу 1 і з другим входом блоку 10 обчислень помилки часу запізнювання, а другий вхід блоку 13 перебудови тестового сигналу з’єднаний з виходом виконавчого пристрою 5. До виходу об’єкта керування 6 підключені послідовно з’єднані інтегратор 14 і блок 15 перебудови моделі об’єкта керування без запізнювання, вихід якого з’єднаний з другим входом моделі об’єкта керування без запізнювання 7. Другий вихід диференціатора 12 з’єднаний з другим входом блоку 15 перебудови моделі об’єкта керування без запізнювання. Система керування працює таким чином. Формувач 1 включає тестовий режим системи керування і подає періодичні тестові сигнали в систему керування. Тестовий сигнал надходить на вхід суматора 2, в якому виконується порівняння керованої величини Y(t) з її заданим значенням Yз(t). Якщо в результаті порівняння Y(t) і Yз(t) має місце різниця, між ними формується сигнал помилки e(t), який надходить на другий сумагор 3 і далі на регулятор 4 і виконавчий пристрій 5, який змінює керуючий вплив на об’єкт керування 6. Разом з цим сигнал з регулятора надходить на модель об’єкта керування, яка є з’єднаними послідовно моделлю об’єкта без запізнювання 7 і моделлю транспортного запізнювання 8. Якщо компоненти моделі об’єкта адекватні реальному об’єкту керування, то сигнал, що надходить з неї на третій суматор 9, не чинить вплив на вихідний сигнал другого суматора 3, що надходить на вхід регулятора 4. При невідповідності часу запізнювання реального об’єкта керування 6 і моделі транспортного запізнювання 8 сигнал помилки e(t) залежатиме від цього чинника, у зв’язку з чим в блоці 10 здійсниться обчислення помилки часу запізнювання і формування сигналу, пропорційного цій величині, який з його виходу надійде на вхід блоку 11, де перетвориться в сигнал перебудови моделі транспортного запізнювання 8. Сигнал помилки з блоку 10 надходить також на другий вхід формувача тестового сигналу 1. У результаті цього виконається перебудова моделі транспортного запізнювання 8, що забезпечить її адекватність реальному об’єкту, і здійсниться корекція періоду тестового сигналу. Для підвищення точності визначення помилки часу запізнювання об’єкта в системі керування сигнали від виконавчого пристрою 5 і диференціатора 12 аналізуються в блоці 13 перебудови тестового сигналу, на виході якого формується сигнал, пропорційний поточному часу запізнюван 41820 8 ня. Далі цей сигнал подається на другий вхід блоку 10 обчислень помилки часу запізнювання і другий вхід формувача тестового сигналу 1 для врахування його при формуванні відповідних вихідних сигналів з блоків 1 і 10. Оцінку динамічних властивостей об’єкта керування в системі здійснюють шляхом аналізу перехідного процесу, викликаного тестовим сигналом. Для цього при тестовому збуренні на вході об’єкта керування вихідні сигнали, формовані диференціатором 12 і інтегратором 14, підключеними до виходу об’єкта керування, подаються на входи блоку 15 перебудови моделі об’єкта керування без запізнювання, на виході якого формується сигнал, який подається на другий вхід моделі об’єкта керування без запізнювання 7 для корекції параметрів моделі. Корекція параметрів моделі 7 дозволяє усунути розбіжність між динамічними властивостями моделі об’єкта і її фізичним оригіналом, що сприяє підвищенню якості регулювання технологічного процесу. Таким чином, в результаті досягнення адекватності моделі об’єкта керування без запізнювання 7 і моделі транспортного запізнювання 8 реальному об’єкту керування забезпечується точніша компенсація відхилення e(t) вихідної ординати Y(t) від її заданого значення Yз(t), а система залишається стійкою в широкому інтервалі зміни транспортного запізнювання і динамічних параметрів об’єкта керування. Як об’єкт дослідження при перевірці працездатності системи керування використовувався змішувач для приготування мийного розчину, що застосовується при обслуговуванні й ремонті транспорту. При регулюванні витрати технічної води транспортне запізнювання і динамічні властивості змішувача змінювалися в широких межах. Запропонована система керування в порівнянні з прототипом, має переваги, що полягають в підвищенні точності ведення процесу регулювання при отриманні миючого розчину із заданою якістю, досягнуті в результаті корекції періоду тестового сигналу і параметрів моделі об’єкту, використовуваної в системі керування, що забезпечили адекватність її реальному технологічному об’єкту. Запропонована система керування може використовуватися не тільки при автоматизації змішувачів різного призначення, але і для керування промисловими технологічними процесами із змінними динамічними властивостями і транспортним запізнюванням, що змінюються у великих межах, а також при реалізації систем діагностування різних технічних рішень з використанням їх електронних моделей. Система керування може бути реалізована на базі серійних елементів цифрової техніки і за допомогою програмованих мікропроцесорних пристроїв. Використання запропонованої системи керування, в порівнянні з прототипом, дозволяє на 512 % знизити динамічну помилку регулювання при змінах не тільки транспортного запізнювання, але і динамічних параметрів технологічного об’єкта. 9 41820 10 11 Комп’ютерна верстка Д. Шеверун 41820 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control of technological object
Автори англійськоюYesaulov Serhii Mykhailovych, Babicheva Olha Fedorivna, Shavkun Viacheslav Mykhailovych, Babakov Serhii Viacheslavovych, Savostian Oleksii Serhiiovych
Назва патенту російськоюСистема управления технологическим объектом
Автори російськоюЕсаулов Сергей Михайлович, Бабичева Ольга Федоровна, Шавкун Вячеслав Михайлович, Бабаков Сергей Вячеславович, Савостьян Алексей Сергеевич
МПК / Мітки
МПК: G05B 13/02
Мітки: технологічним, об'єктом, система, керування
Код посилання
<a href="https://ua.patents.su/6-41820-sistema-keruvannya-tekhnologichnim-obehktom.html" target="_blank" rel="follow" title="База патентів України">Система керування технологічним об’єктом</a>
Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Автори: Жиляков Віктор Іванович, Ткачов Роман Юрійович
МПК: G05B 13/02
Мітки: система, запізнюванням, об'єктом, керування
Формула / Реферат:
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим...
Система керування
Номер патенту: 59845
Опубліковано: 15.09.2003
Автори: Жиляков Віктор Іванович, Дрючин Віктор Гаврилович, Ткачук Денис Ярославович
МПК: G05B 13/00
Формула / Реферат:
Система керування, що містить об'єкт керування, що складається з n послідовно з'єднаних інерційних ланок, модель об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а виходом, що віднімає, - до виходу об'єкта керування, зворотну модель об'єкта керування, два підсилювачі, яка відрізняється тим, що на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а n його...
Система керування
Номер патенту: 61030
Опубліковано: 15.10.2003
Автори: Дрючин Віктор Гаврилович, Ткачук Денис Ярославович, Жиляков Віктор Іванович
МПК: G05B 13/00
Формула / Реферат:
Система керування, до складу якої входить об'єкт керування, що складається з «n» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає, - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі, яка відрізняється тим, що додатково введені «n+1» квадраторів, інтегратор і блок...
Система керування літаком
Номер патенту: 37288
Опубліковано: 25.11.2008
Автори: Бандура Іван Миколайович, Дибська Ирина Юріївна, Ільченко Олексій Владиславович
МПК: B64C 13/00
Мітки: система, літаком, керування
Формула / Реферат:
Система керування літаком, що містить важіль керування, зв'язаний механічною проводкою з золотниковою тягою кермового приводу, сервопривід, паралельно підключений до золотникової тяги і електрично зв'язаний з датчиком кута, вмонтованими в проводку керування, резервну завантажувальну пружину і пружинний пристрій негативної жорсткості, що складається з попередньо стиснутої пружини і качалки, датчик кутової швидкості, датчик кутового прискорення...
Система керування
Номер патенту: 66917
Опубліковано: 15.06.2004
Автори: Маранов Олександр Вікторович, Чигирин Юрій Трохимович, Чигирин Олег Трохимович
МПК: G06F 11/16, G06F 11/00
Формула / Реферат:
Система керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом системи керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Попередній патент: Гальмова важільна передача візка транспортного засобу
Наступний патент: Сушарка для сформованих у рулони сільськогосподарських матеріалів
Випадковий патент: Пристрій для визначення пружних характеристик пружинних клем