Пристрій для укладання піддонів в стопу
Номер патенту: 4327
Опубліковано: 17.01.2005
Автори: Жарова Світлана Іванівна, Ковальов Олександр Іванович, Любімов Валерій Михайлович, Валіулін Геннадій Романович
Формула / Реферат
Пристрій для укладання піддонів в стопу, що складається із роликового конвеєра для подачі піддонів, вузла багатошарового укладання піддонів і підтримуючих стопорних важелів, який відрізняється тим, що вузол багатошарового укладання піддонів в стопу складається із змонтованої з можливістю зворотно-поступального переміщення в горизонтальній площині каретки по нерухомих напрямних, яка містить дві вертикальні напрямні і траверсу з двома ярусами несучих вил, які розташовані один над одним, а привід каретки здійснюється через захвати за допомогою тяги, з'єднаною з двома нескінченими ланцюгами, що встановлені на ведучих і ведених зірочках, які утворюють замкнені ланцюгові контури, а станина в верхній частині ланцюгового контура має горизонтальні нерухомі напрямні.
Текст
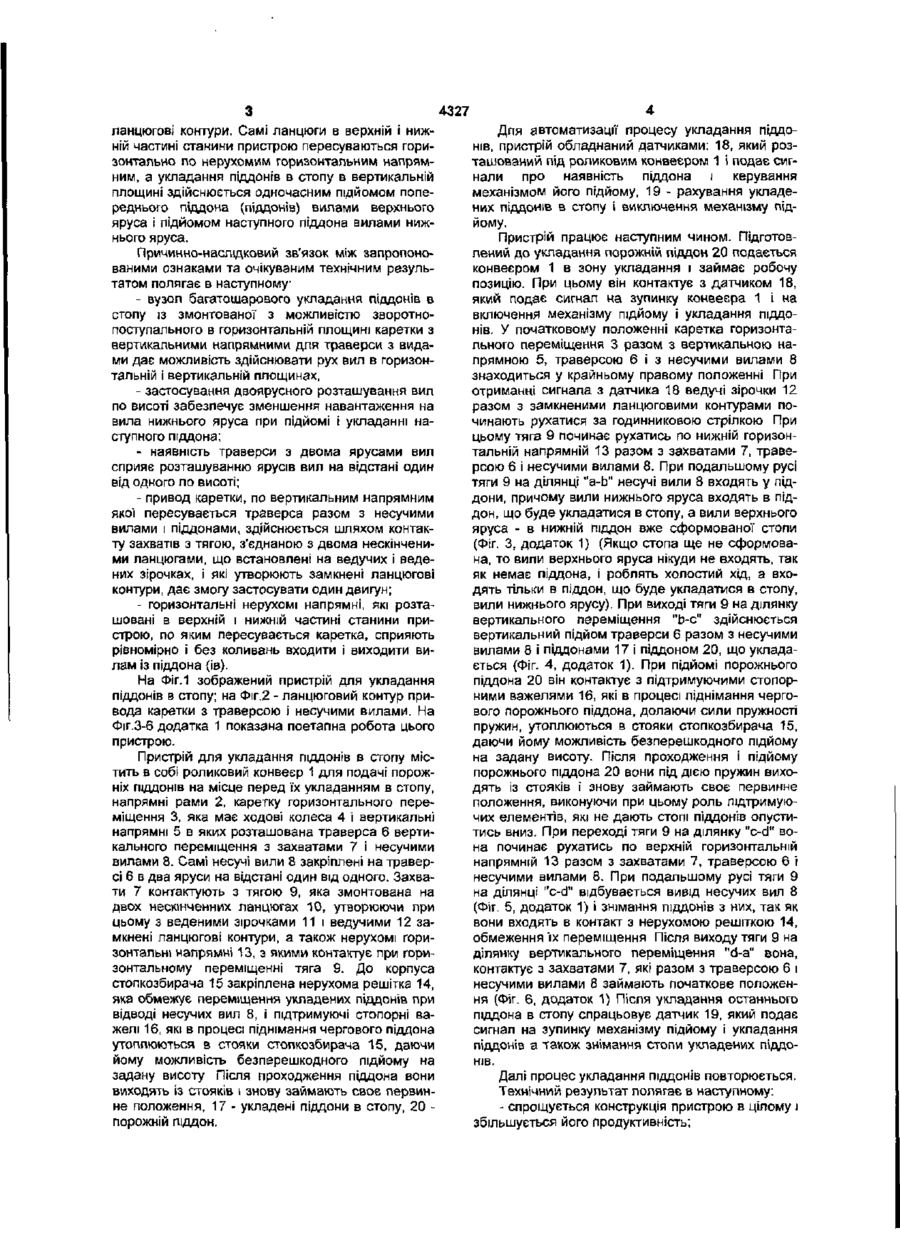
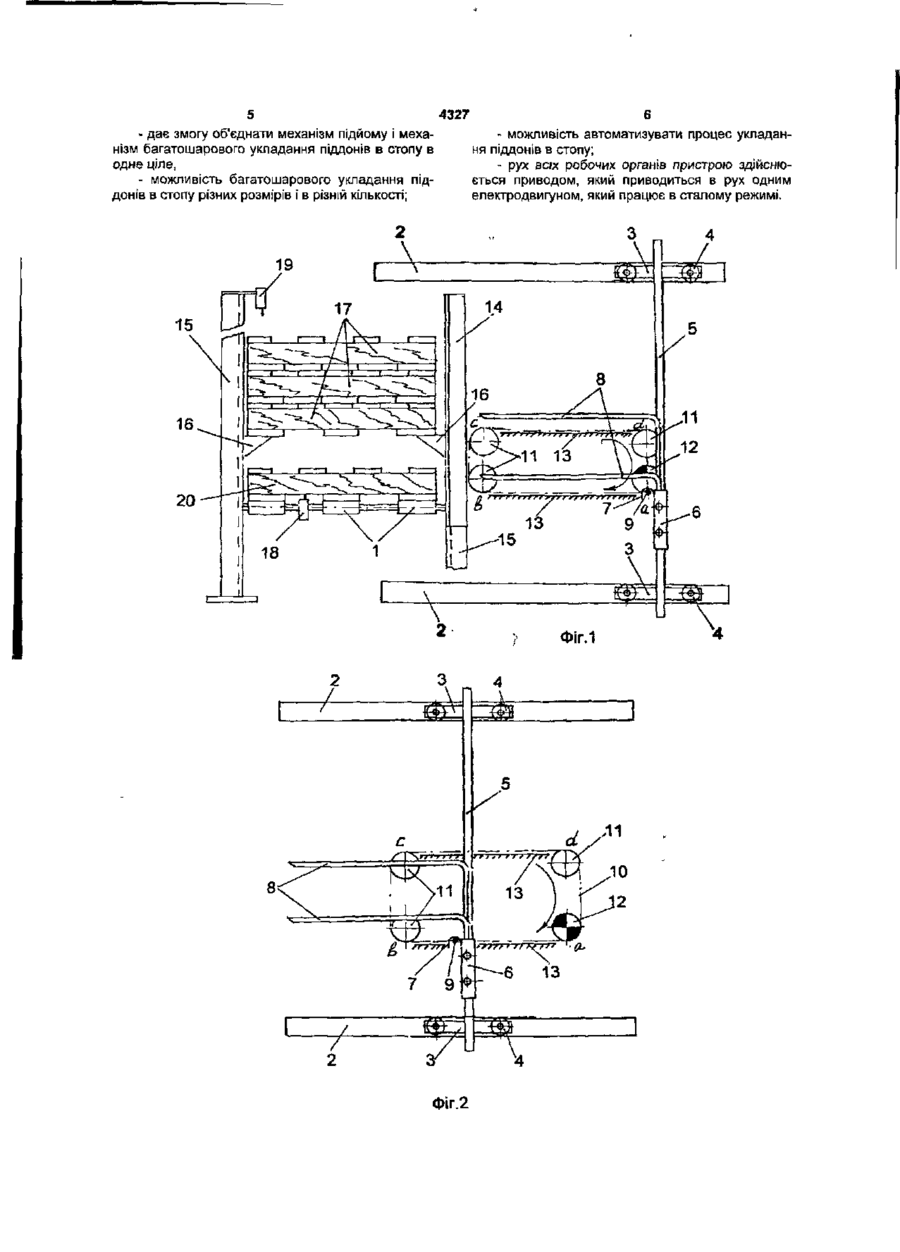
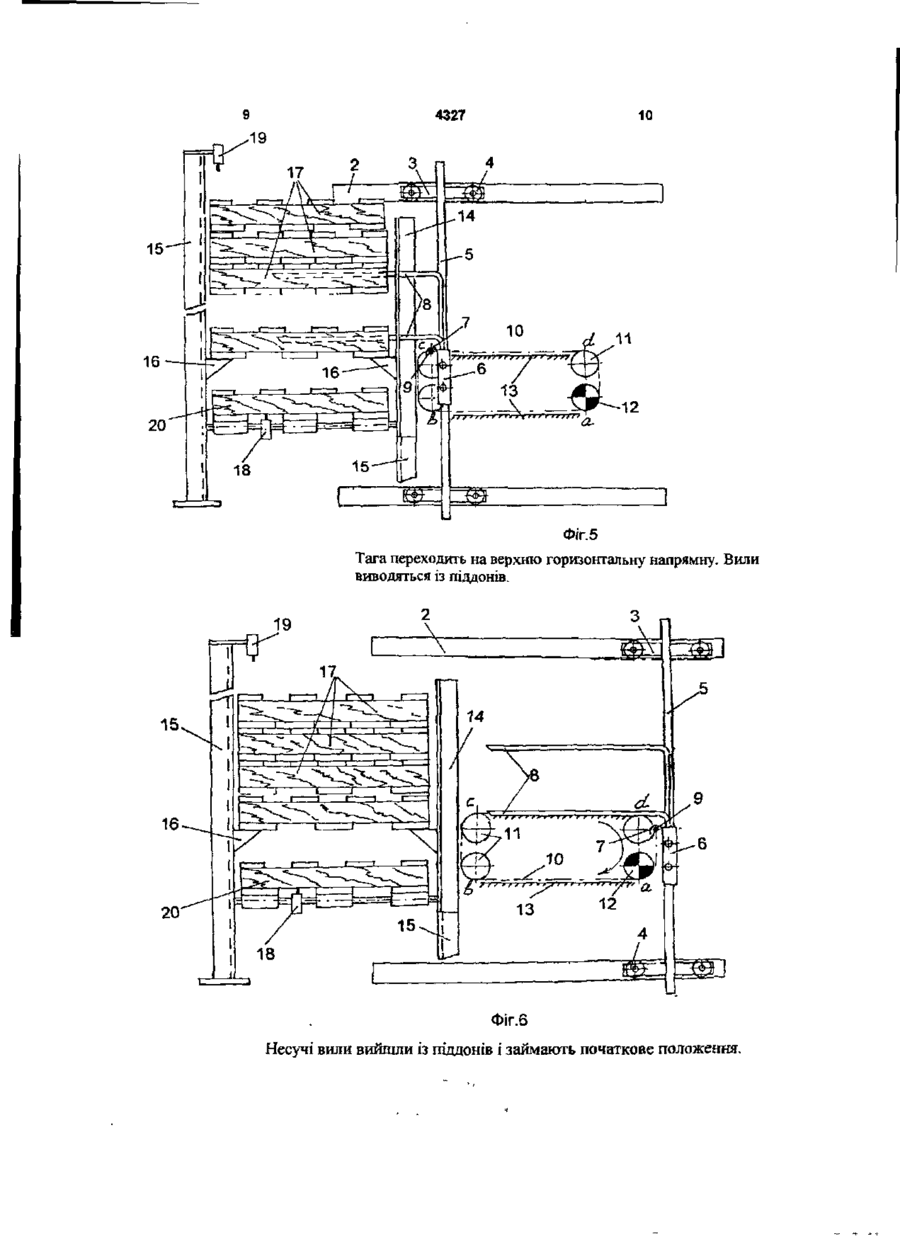
Пристрій для укладання піддонів в стопу, що складається ІЗ роликового конвеєра для подачі піддонів, вузла багатошарового укладання піддонів і підтримуючих стопорних важелів, який відрі зняється тим, що вузол багатошарового укладання піддонів в стопу складається Із змонтованої з можливістю зворотно-поступального переміщення в горизонтальній площині каретки по нерухомих напрямних, яка містить дві вертикальні напрямні і траверсу з двома ярусами несучих вил, які розташовані один над одним, а привід каретки здійснюється через захвати за допомогою тяги, з'єднаною з двома нескінченими ланцюгами, що встановлені на ведучих і ведених зірочках, які утворюють замкнені ланцюгові контури, а станина в верхній частині ланцюгового контура має горизонтальні нерухомі напрямні. Корисна модель відноситься до пристроїв для пакування предметів на піддоні і може бути використана в харчовій, медичній, хімічній та інших галузях народного господарства. Відомі пристрої для укладання піддонів вертикально в стопу, які складаються із роликового конвеєра (рольганга) для подачі порожніх піддонів, каретки, важелів захвата, механізму привода підйому стопи піддонів і системи автоматичного керування. Це пристрої які застосовуються в пакетозбираючих і пакеторозбираючих машинах Monarh НЕ 162-163, в машинах фірми "Enzinger", машинах С 2000 фірми "МераІ" (Франція), "Holstein und Kappert", VPII фірми "Ketner" (книга Р.Л Рухадзе "Комплексная механизация заводов вторичного виноделия", М./'Пищевая промышленность", 1978 год, стр. 134-156, авторські свідоцтва СРСР №№ 1232577, 1373628, 1294700). Недоліком таких пристроїв є наявність великої Кількості приводів, їх циклічність в роботі, велика кількість рухомих і нерухомих деталей, громіздкість, складна конструкція, великі витрати часу переміщення холостого ходу каретки, трудоємкість експлуатації і налагоджування Відомо також пристрій для укладання піддонів в стопу, який використовується в пакеторозбираючих машинах РЗ ВРГ (книга Р Л Рухадзе "Комплексная механизация заводов вторичного виноделия", М., "Пищевая промышленность", 1978 год, стр. 151, який складається із рольганга, для подачі і переміщення порожніх піддонів, важелів захвату з пружинами і механізму приводів підйому порожніх піддонів Недоліком такого пристрою є наявність великої кількості важелів захвату і пружин, напрямних по яким пересуваються важелі захвату, приводів підйому важелів захвату, низька надійність його в роботі, можливий перекіс механізму підйому стопи порожніх піддонів, ненадійна робота самих важелів захватів І пружин. В основу корисної моделі поставлена задача удосконалення пристрою для укладання ПІДДОНІВ В стопу шляхом змінювання конструкції', яка забезпечує простоту самого пристрою, збільшення надійності пристрою в цілому а також наявність лише одного приводного механізму. Поставлена задача досягається тим, що пристрій для укладання піддонів в стопу складається із роликового конвеєра для подачі піддонів, вузла багатошарового укладання піддонів і підтримуючих стопорних важелів Згідно з корисною моделлю, вузол багатошарового укладання ПІДДОНІВ В стопу, складається із змонтованої з можливістю зворотно-поступального переміщення в горизонтальній площині каретки. Сама каретка містить дві вертикальні напрямні і траверсу з двома ярусами вил, які розташовані один над одним Привід каретки здійснюється через захвати за допомогою тяги, з'єднаної з двома нескінченими ланцюгами, що встановлені на ведучих і ведених зірочках, і які утворюють замкнені CM CO 4327 ланцюгові контури. Самі ланцюги в верхній і нижній частині станини пристрою пересуваються горизонтально по нерухомим горизонтальним напрямним, а укладання піддонів в стопу в вертикальній площині здійснюється одночасним підйомом попереднього піддона (піддонів) вилами верхнього яруса і підйомом наступного піддона вилами нижнього яруса. Причинно-наспідковий зв'язок між запропонованими ознаками та очікуваним технічним результатом полягає в наступному - вузол багатошарового укладання піддонів в стопу із змонтованої з можливістю зворотнопоступального в горизонтальній площині каретки з вертикальними напрямними для траверси з видами дає можливість здійснювати рух вил в горизонтальній і вертикальній площинах, - застосування двоярусного розташування вил по висоті забезпечує зменшення навантаження на вила нижнього яруса при підйомі І укладанні наступного піддона; - наявність траверси з двома ярусами вил сприяє розташуванню ярусів вил на відстані один від одного по висоті; - привод каретки, по вертикальним напрямним якої пересувається траверса разом з несучими вилами і піддонами, здійснюється шляхом контакту захватів з тягою, з'єднаною з двома нескінченими ланцюгами, що встановлені на ведучих і ведених зірочках, і які утворюють замкнені ланцюгові контури, дає змогу застосувати один двигун; - горизонтальні нерухомі напрямні, які розташовані в верхній і нижній частині станини пристрою, по яким пересувається каретка, сприяють рівномірно і без коливань входити і виходити вилам із піддона (ів). На Фіг. 1 зображений пристрій для укладання піддонів в стопу; на Фіг.2 - ланцюговий контур привода каретки з траверсою і несучими вилами. На Фіг.3-6 додатка 1 показана поетапна робота цього пристрою. Пристрій для укладання піддонів в стопу містить в собі роликовий конвеєр 1 для подачі порожніх ПІДДОНІВ на місце перед їх укладанням в стопу, напрямні рами 2, каретку горизонтального переміщення 3, яка має ходові колеса 4 і вертикальні напрямні 5 в яких розташована траверса 6 вертикального переміщення з захватами 7 і несучими вилами 8. Самі несучі вили 8 закріплені на траверсі 6 в два яруси на відстані один від одного. Захвати 7 контактують з тягою 9, яка змонтована на двох нескінченних ланцюгах 10, утворюючи при цьому з веденими зірочками 11 і ведучими 12 замкнені ланцюгові контури, а також нерухомі горизонтальні напрямні 13, з якими контактує при горизонтальному переміщенні тяга 9. До корпуса стопкозбирача 15 закріплена нерухома решітка 14, яка обмежує переміщення укладених піддонів при відводі несучих вил 8, і підтримуючі стопорні важелі 16, які в процесі піднімання чергового піддона утеплюються в стояки стопкозбирача 15, даючи йому можливість безперешкодного підйому на задану висоту Після проходження піддона вони виходять Із стояків і знову займають своє первинне положення, 17 - укладені піддони в стопу, 20 порожній піддон. 4 Для автоматизації процесу укладання піддонів, пристрій обладнаний датчиками; 18, який розташований під роликовим конвеєром 1 і подає сигнали про наявність піддона і керування механізмом його підйому, 19 - рахування укладених піддонів в стопу і виключення механізму підйому. Пристрій працює наступним чином. Підготовлений до укладання порожній піддон 20 подається конвеєром 1 в зону укладання і займає робочу позицію. При цьому він контактує з датчиком 18, який подає сигнал на зупинку конвеєра 1 і на включення механізму підйому і укладання піддонів, У початковому положенні каретка горизонтального переміщення 3 разом з вертикальною напрямною 5, траверсою 6 і з несучими вилами 8 знаходиться у крайньому правому положенні При отриманні сигнала з датчика 18 ведучі зірочки 12 разом з замкненими ланцюговими контурами починають рухатися за годинниковою стрілкою При цьому тяга 9 починає рухатись по нижній горизонтальній напрямній 13 разом з захватами 7, траверсою 6 і несучими вилами 8. При подальшому русі тяги 9 на ділянці "а-Ь" несучі вили 8 входять у піддони, причому вили нижнього яруса входять в піддон, що буде укладатися в стопу, а вили верхнього яруса - в нижній піддон вже сформованої стопи (Фіг. З, додаток 1) (Якщо стопа ще не сформована, то вили верхнього яруса нікуди не входять, так як немає піддона, і роблять холостий хід, а входять тільки в піддон, що буде укладатися в стопу, вили нижнього ярусу). При виході тяги 9 на ділянку вертикального переміщення "Ь-с" здійснюється вертикальний підйом траверси 6 разом з несучими вилами 8 і піддонами 17 і піддоном 20, що укладається (Фіг. 4, додаток 1). При підйомі порожнього піддона 20 він контактує з підтримуючими стопорними важелями 16, які в процесі піднімання чергового порожнього піддона, долаючи сили пружності пружин, утеплюються в стояки стопкозбирача 15, даючи йому можливість безперешкодного підйому на задану висоту. Після проходження і підйому порожнього піддона 20 вони під дією пружин виходять із стояків і знову займають своє первинне положення, виконуючи при цьому роль підтримуючих елементів, які не дають стопі піддонів опуститись вниз. При переході тяги 9 на ділянку "с-сГ вона починає рухатись по верхній горизонтальній напрямній 13 разом з захватами 7, траверсою 6 і несучими вилами 8. При подальшому русі тяги 9 на ділянці "c-d" відбувається вивід несучих вил 8 (Фіг. 5, додаток 1) і знімання піддонів з них, так як вони входять в контакт з нерухомою решіткою 14, обмеження їх переміщення Після виходу тяги 9 на ділянку вертикального переміщення "d-a" вона, контактує з захватами 7, які разом з траверсою 6 і несучими вилами 8 займають початкове положення (Фіг. 6, додаток 1) Після укладання останнього піддона в стопу спрацьовує датчик 19, який подає сигнал на зупинку механізму підйому І укладання піддонів а також знімання стопи укладених піддонів. Далі процес укладання піддонів повторюється. Технічний результат полягає в наступному. - спрощується конструкція пристрою в цілому і збільшується його продуктивність; 4327 - дає змогу об'єднати механізм підйому і механізм багатошарового укладання піддонів в стопу в одне ціле, - можливість багатошарового укладання піддонів в стопу різних розмірів і в різній кількості; - можливість автоматизувати процес укладання піддонів в стопу; - рух всіх робочих органів пристрою здійснюється приводом, який приводиться в рух одним електродвигуном, який працює в сталому режимі. ^^\гїГгг/>Угг?гт/гТг7їгі/і Фіг.1 Фіг.2 4327 ФІГ.З Тага знаходиться на ділянки " а - b ". Несучі вили входять в піддони. Ті > 7 / > Т / / /\/ > Фіг.4 На вертикальній ділянки * b - с " здійснюється підйом піддонів. * 4327 10 Фіг. 5 Тага переходить на верхню горизонтальну напрямну. Вили виводяться із піддонів. 19 Фіг.6 Несучі вили вийшли із піддонів і займають початкове положення. 11 Комп'ютерна верстка А Крулевский 4327 Підписне 12 Тираж 37 прим Міністерство освіти І науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for piling of pallets
Автори англійськоюValiulin Hennadii Romanovych, Liubimov Valerii Mykhailovych, Zharova Svitlana Ivanivna
Назва патенту російськоюУстройство для укладки поддонов в стопу
Автори російськоюВалиулин Геннадий Романович, Любимов Валерий Михайлович, Жарова Светлана Ивановна
МПК / Мітки
МПК: B65B 35/30, B65G 57/00, B65B 5/10, B65B 35/50
Мітки: стопу, укладання, пристрій, піддонів
Код посилання
<a href="https://ua.patents.su/6-4327-pristrijj-dlya-ukladannya-piddoniv-v-stopu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для укладання піддонів в стопу</a>
Пристрій для укладання пляшок в тару

Номер патенту: 63605
Опубліковано: 15.01.2004
Автори: Пітра Михайло Михайлович, Жарова Світлана Іванівна, Свінціцька Анна Іванівна, Валіулін Генадій Романович
МПК: B65B 21/00
Мітки: пристрій, тару, укладання, пляшок
Формула / Реферат:
1. Пристрій для укладання пляшок в тару, що складається із конвеєрів для подачі пляшок і тари, механізму орієнтації і фіксації тари, стола-нагромаджувача для формування вертикального шару, механізмів для захоплювання і переміщення пляшок і міжшарових прокладок в тару, який відрізняється тим, що вузол для укладання пляшок і міжшарових прокладок складається із змонтованої з можливістю зворотно-поступального переміщення в горизонтальній площині...
Пристрій для обгортання пакет-піддонів плівкою
Номер патенту: 58140
Опубліковано: 15.07.2003
Автори: Шевченко Олександр Юхимович, Коваль Ігор Йосипович, Соколенко Анатолій Іванович
МПК: B65B 21/00
Мітки: плівкою, пакет-піддонів, обгортання, пристрій
Формула / Реферат:
Пристрій для обгортання пакет-піддонів плівкою, який включає обертовий стіл, притискну плиту і бобінотримач, встановлений на вертикальній колоні з можливістю вертикального зворотно-поступального руху, який відрізняється тим, що система стабілізації натягу плівки виконана у вигляді кінематично зв'язаних між собою зубчастими колесами роликів, виконаних бочкоподібної форми та змонтованих на одній платформі з бобінотримачем.
Пристрій для укладання пляшок у тару

Номер патенту: 474
Опубліковано: 29.12.1999
Автори: Свірідов Олег Іванович, Гуренко Анатолій Степанович, Кучер Ігор Євгенович, Лозовий Василь Леонідович
МПК: B65B 5/06
Мітки: пристрій, тару, укладання, пляшок
Формула / Реферат:
Пристрій для укладання пляшок у тару, що складається із корпусу з горизонтально розташованим транспортером, перпендикулярно якому розташований механізм переміщення тари, і вертикально розташованих боковин корпусу, між якими розташована, із можливістю зворотно-поступального руху по дузі, каретка, основа якої містить головки захоплювання, який відрізняється тим, що він додатково містить прийомну касету, яка розташована між механізмом і...
Пристрій для укладання пляшок в тару

Номер патенту: 50686
Опубліковано: 15.10.2002
Автори: Цюпка Тарас Григорович, Жарова Світлана Іванівна, Валіулін Генадій Романович, Горбатюк Дмитро Васильович
МПК: B65B 21/00
Мітки: пристрій, пляшок, тару, укладання
Формула / Реферат:
1. Пристрій для укладання пляшок в тару, який містить конвеєри для подачі пляшок і тари, механізм орієнтації і фіксації тари, стіл-нагромаджувач для формування вертикального шару, механізми подачі в тару пляшок і міжшарових прокладок, який відрізняється тим, що вузол для укладання пляшок складається із змонтованої з можливістю зворотно-поступального переміщення в горизонтальній площині каретки з механізмом укладання міжшарових прокладок, а...
Пристрій для укладання абразивної маси
Номер патенту: 43501
Опубліковано: 15.01.2004
Автори: Кукліч Володимир Іванович, Большов Генадій Павлович, Вергелес Михайло Анатолійович, Гранкін Олександр Сергійович, Гранкін Василь Іванович, Ярова Людмила Григорівна, Сталінський Дмитро Віталійович
МПК: B28B 13/00
Мітки: абразивної, маси, пристрій, укладання
Формула / Реферат:
Пристрій для укладання абразивної маси, до складу якого входить прес-форма з керном, корпус, розрівнювач та живильник, який відрізняється тим, що пристрій обладнаний трьома двоплечими важелями, гвинтом, що установлений та закріплений в центрі корпусу та обладнаний циліндричною головкою та з'єднаною з гвинтом гайкою, причому циліндрична головка гвинта входить в отвір керна, а двоплечі важелі установлені радіально на рівній відстані один від...
Попередній патент: Пристрій для зберігання і транспортування склотари і готової продукції в горизонтальному положенні
Наступний патент: Спосіб визначення ртуті
Випадковий патент: Спосіб прогнозування розвитку гнійно-септичних ускладнень гострого панкреатиту