Абразивний верстат з автоматичною заміною інструмента для різання радіоактивних матеріалів
Номер патенту: 45081
Опубліковано: 15.03.2002
Автори: Хоролець Василь Петрович, Бурсов Генадій Володимирович, Ткаченко Віктор Максимович, Пількевич Сергій Миколайович, Карпачов Юрій Андрійович
Формула / Реферат
1. Абразивний верстат з автоматичною заміною інструмента для різання радіоактивних матеріалів, що містить інструментальний магазин, механізм закріплення інструмента і шпиндельну головку з інструментом, який відрізняється тим, що верстат обладнаний герметичним робочим баком з кришкою, всередині якого розташовані маніпулятор заміни інструмента, модуль інструмента і дощувальна установка для дезактивації робочого бака, при цьому модуль інструмента прикріплений до кришки бака і містить рухомий корпус з встановленим в ньому співвісно ведучим валом, шпиндель шпиндельної головки, з'єднаних один з одним за допомогою рухомої порожнистої консолі, з встановленою всередині її пасовою передачею для приводу шпинделя від ведучого вала, причому верхня частина рухомого корпуса розташована зовні над кришкою робочого бака і жорстко з'єднана з тягою приводу подачі інструмента з можливістю її поворота відносно осі ведучого вала, при цьому зовні на кришці робочого бака розміщений інструментальний магазин з інструментами, виконаний у вигляді похилої напрямної з замком і його приводом, механізм закріплення інструмента, виконаний у вигляді знімного торцевого захвата з реверсивним обертанням і взаємодіючий зі шпинделем через отвір у кришці робочого бака, з'єднаний з дощувальною установкою насос зрошення з приводом, а також приводи маніпулятора заміни інструмента, механізм його закріплення і привід інструмента.
2. Абразивний верстат за п. 1, який відрізняється тим, що маніпулятор заміни інструмента містить рухомий і нерухомий захвати, співвісно розташовані порожнистий вал і шток, причому верхня частина штока, розташована за межами робочого бака, через кульову опору з'єднана з приводом осьового переміщення, а нижня частина - виконана у вигляді сфери і взаємодіє з рухомим захватом з можливістю його переміщення щодо нерухомого захвата, повороту навколо їхньої спільної осі і фіксування інструмента, що знаходиться між ними, при цьому нерухомий захват жорстко з'єднаний з нижньою частиною порожнистого вала, верхня частина якого розміщена зовні робочого бака і за допомогою важеля з'єднана з приводом з можливістю обертального руху порожнистого вала відносно штока і кутового переміщення захватів разом з інструментом у напрямку до шпиндельної головки модуля інструмента.
Текст
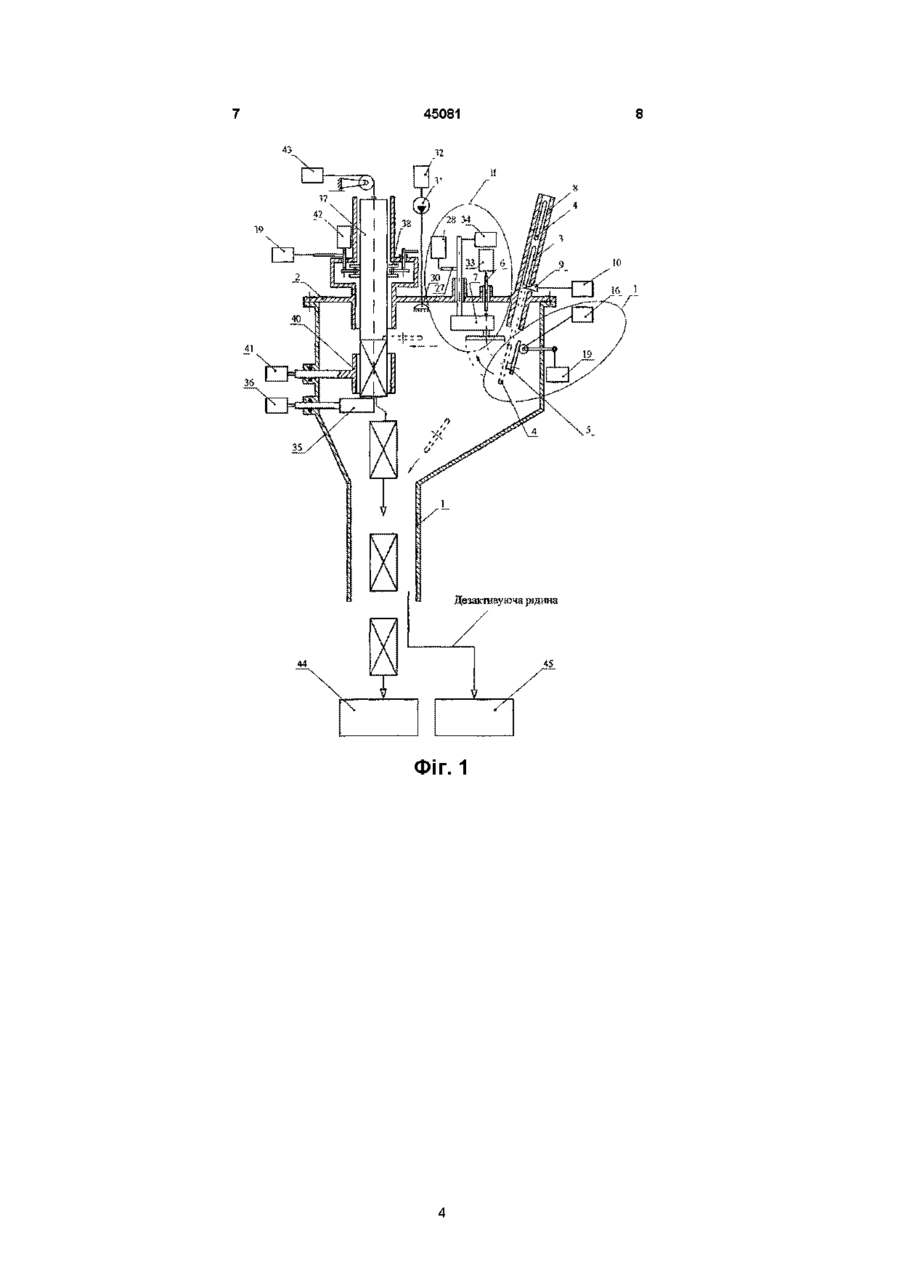
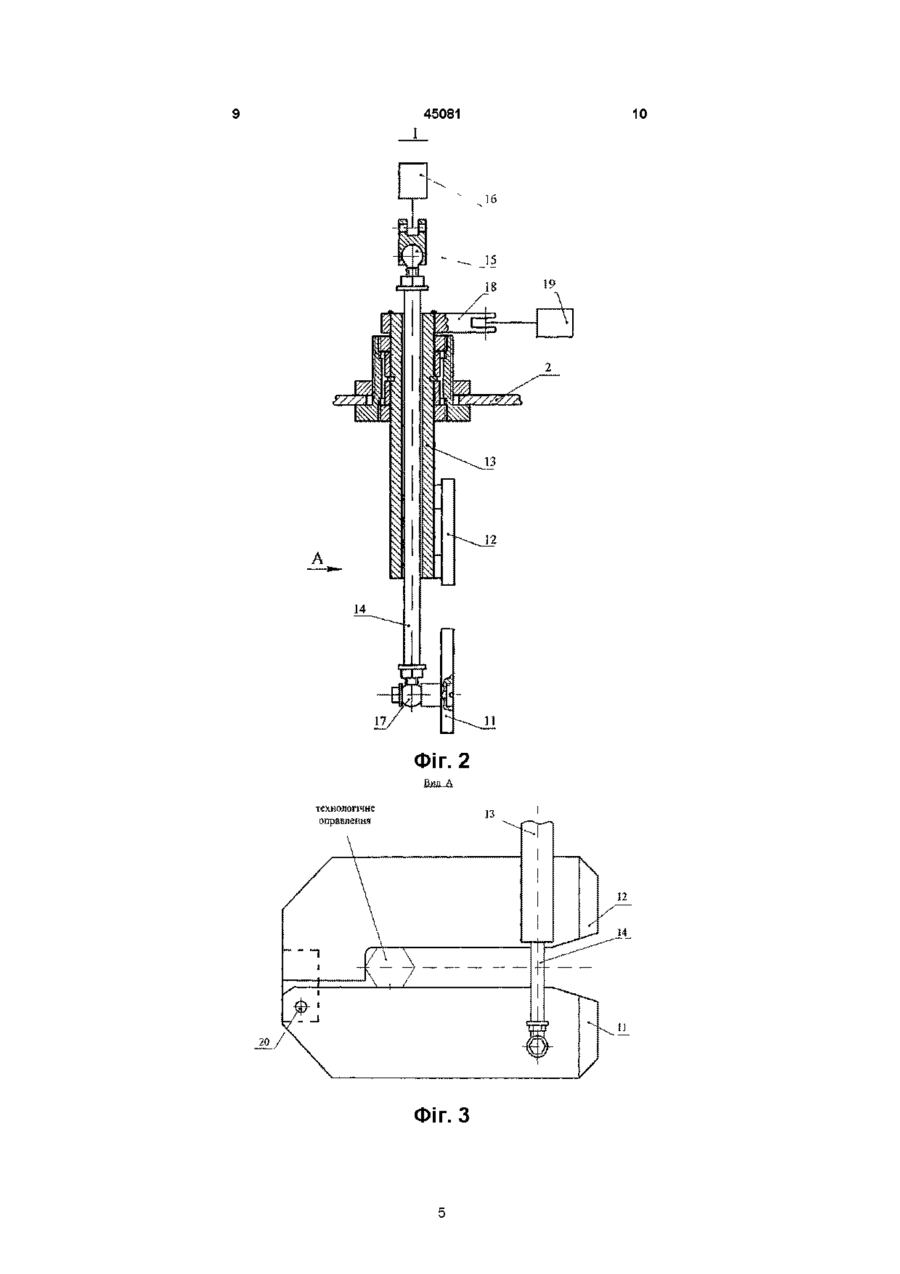
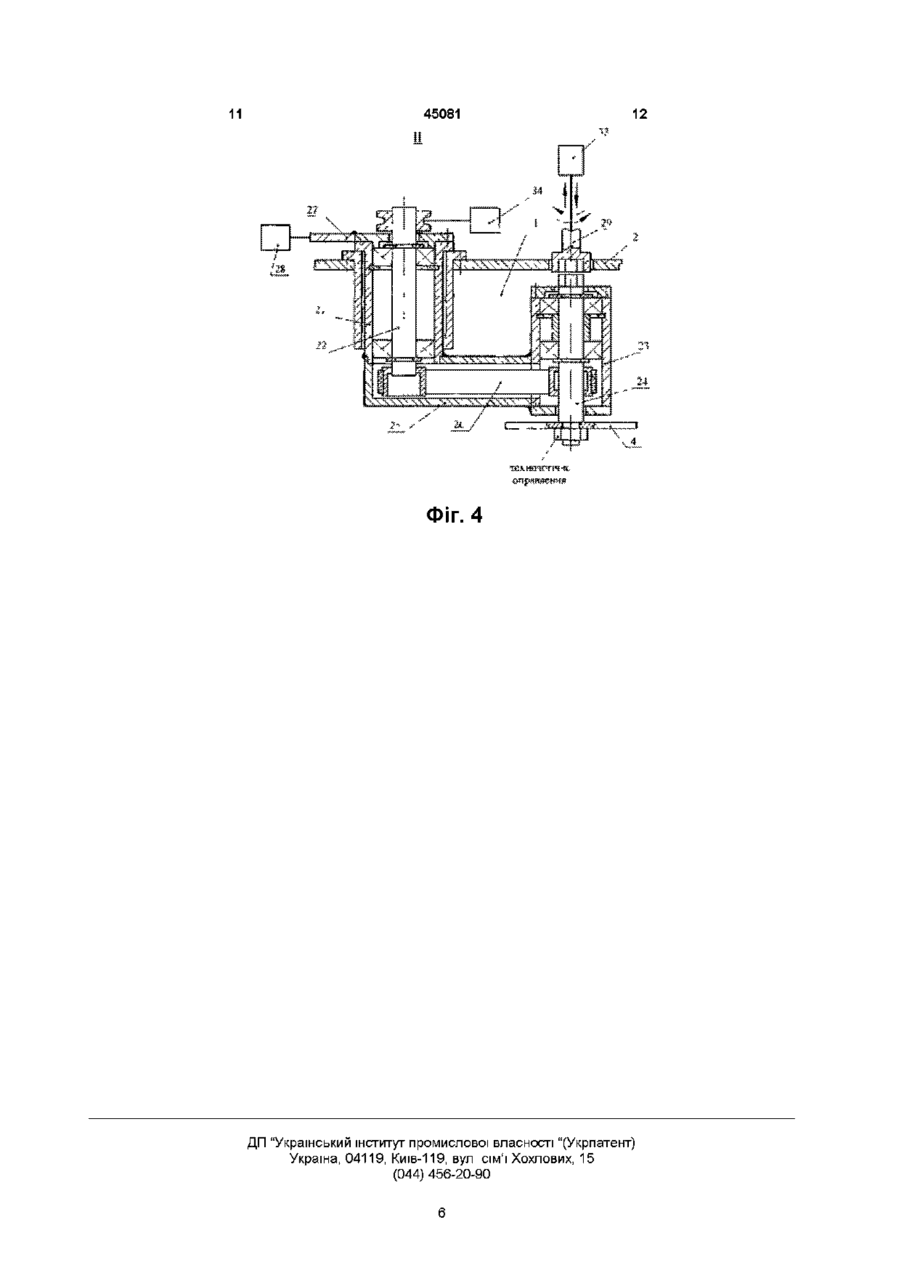
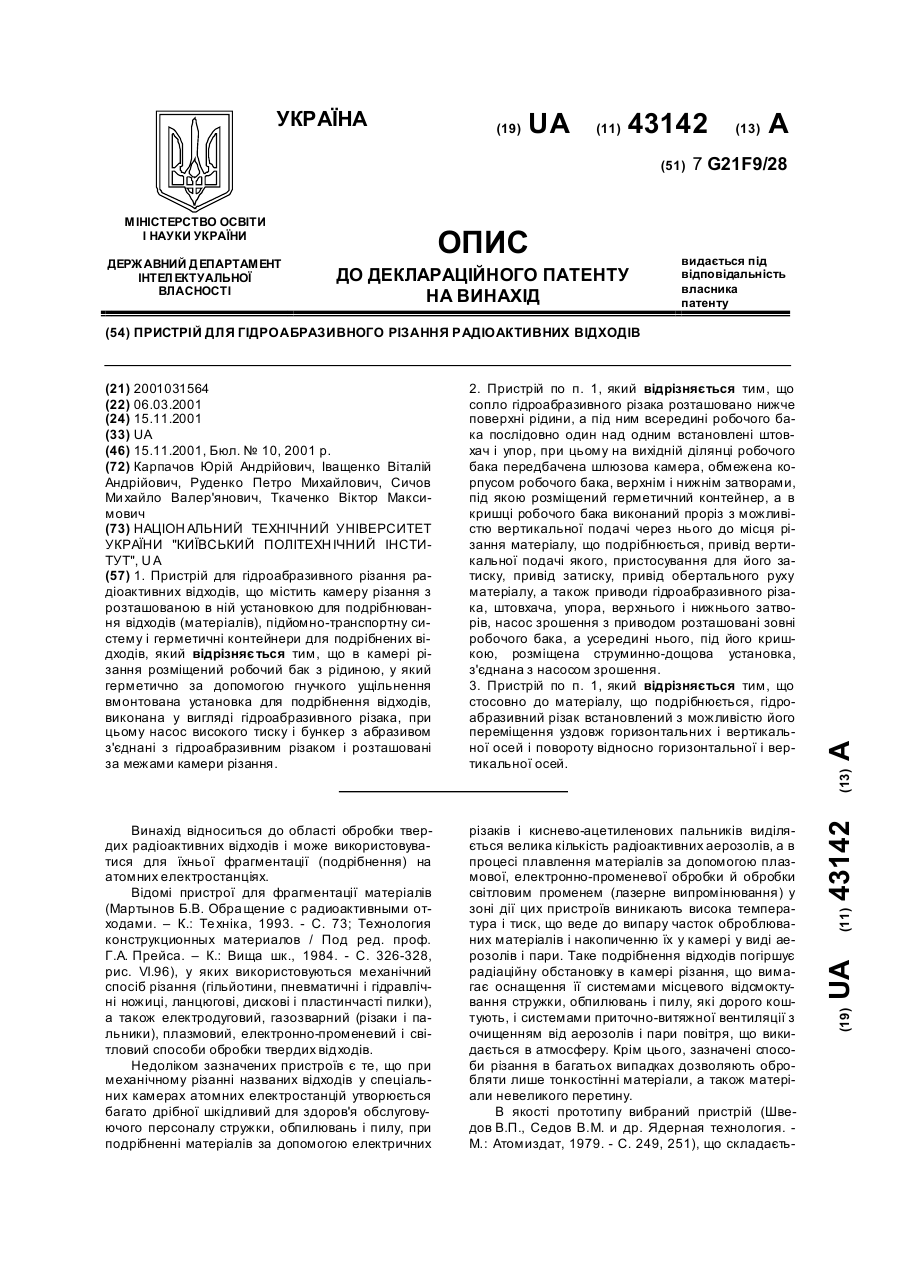
1 Пристрій для безупинної гідротермічної обробки зерна круп'яних культур, що має засіб подачі зерна від зовнішнього джерела, підключений на вихід зазначеного засобу вхідний затвор, що самоущільнюється, для безупинної подачі зерна на гідротермічну обробку, проточну циліндричну посудину, що підключена до джерела пари засобами и подачі в зону нагрівання і розподілу в зоні пропарювання в об'ємі оброблюваного зерна, вихідний затвор, що самоущільнюється, для безупинної видачі гідротермічне обробленого зерна і засоби видалення конденсату з гідротермічне обробленого зерна, який відрізняється тим, що проточна циліндрична посудина оснащена вхідним і вихідним розтрубами, установлена під кутом до горизонталі менше 90° і розділена на три відособлені секції, причому 00 о ю 45081 1140932 "Абразивный отрезной станок с автоматической сменой инструмента", B23Q3/155, 1985 г, БИ № 7), який складається з інструментального магазина, механізму закріплення інструмента і шпиндельної головки зі шпинделем Цей пристрій має тіж самі недоліки, що властиві розглянутим вище пристроям при механічному різанні названих ВІДХОДІВ у спеціальних камерах атомних електростанцій і інших виробництв утворюється багато дрібної шкідливої для здоров'я обслуговуючого персоналу стружки, ошурок і пилу - таке роздрібнення ВІДХОДІВ погіршує радіаційну та іншу обстановку в камерах різання, що вимагає оснащення їх системами місцевого відсосу стружки, ошурок і пилу Безпека пристрою для різання радіоактивних і інших матеріалів може бути підвищена шляхом використання в камері різання герметичного бака з розташованим у ньому абразивним відрізним верстатом, у якому заміна зношеного Інструмента проводиться автоматично по команді оператора з пульта керування, що знаходиться за межами камери різання В основу винаходу покладена задача удосконалення абразивного верстата з автоматичною заміною інструмента для різання радіоактивних матеріалів шляхом розміщення верстата в герметичному об'ємі, що дозволить підвищити захист обслуговуючого персоналу і навколишнього середовища від радіоактивного й іншого шкідливого впливу Поставлена задача вирішується так, що в абразивному верстаті для різання радіоактивних і інших матеріалів, що містить інструментальний магазин, механізм закріплення інструмента і шпиндельну головку з інструментом, ВІДПОВІДНО до винаходу верстат обладнаний герметичним робочим баком із кришкою, усередині якого розташовані маніпулятор заміни інструмента, модуль інструмента і дощувальна установка для дезактивації робочого бака, при цьому модуль інструмента прикріплений до кришки бака і містить рухомий корпус із встановленим у ньому СПІВВІСНО ведучим валом, шпиндель шпиндельної головки, з'єднаними один з одним за допомогою рухомої порожнистої консолі з встановленою усередині її пасовою передачею для приводу шпинделя від ведучого вала, причому верхня частина рухомого корпуса розташована зовні над кришкою робочого бака і жорстко з'єднана з тягою привод подачі інструмента з можливістю и повороту відносно осі ведучого вала, при цьому зовні на кришці робочого бака розміщений інструментальний магазин з інструментами, виконаний у вигляді похилої напрямної з замком і його приводом, механізм закріплення інструмента, виконаний у вигляді зйомного торцевого захвата з реверсивним обертанням і взаємодіючий зі шпинделем через отвір у кришці робочого бака, з'єднаний з дощувальною установкою насос зрошення з приводом, а також приводи маніпулятора заміни інструмента, механізму його закріплення і привід інструмента, при цьому маніпулятор заміни інструмента містить рухомий і нерухомий захвати, СПІВВІСНО розташовані порожнистий вал і шток, причому верхня частина штока, розташована за межами робочого бака, через кульову опору з'єднана з приво дом осьового переміщення, а нижня частина - виконана у вигляді сфери і взаємодіє з рухомим захватом з можливістю його переміщення щодо нерухомого захвата, повороту навколо їхньої спільної осі і фіксування інструмента, що знаходиться між ними, при цьому нерухомий захват жорстко з'єднаний з нижньою частиною порожнистого вала, верхня частина якого розміщена зовні робочого бака і за допомогою важеля з'єднана з приводом з можливістю обертального руху порожнистого вала відносно штока і кутового переміщення захватів разом з інструментом у напрямку до шпиндельної головки модуля інструмента Використання запропонованого абразивного верстата дозволить підвищити безпеку різання радіоактивних і інших матеріалів Загальний вид такого верстата приведений на фіг 1, на фіг 2 - приведена будова маніпулятора заміни інструмента, на фіг 3 - показана конструкція захватів маніпулятора для фіксації інструмента (вид А), на фіг 4 - показана конструкція модуля інструмента, при цьому на фіг 1 виносні елементи І і II показані умовно До складу абразивного верстата для різання матеріалів входять робочий бак 1 з кришкою 2, інструментальний магазин 3 з інструментами 4, маніпулятор заміни інструмента 5, механізм закріплення інструмента 6 і модуль інструмента 7 Робочий бак 1 призначений для герметичної установки в ньому маніпулятора заміни інструмента 5 і модуля інструмента 7 В інструментальному магазині З, розміщеному зовні робочого бака 1, розташовано пакет інструментів 4, кожний з яких по окремості автоматично подається по похилій напрямній 8 у робочий бак 1 з використанням замка 9 і його привода 10 Маніпулятор заміни інструмента 5 (виносний елемент І) призначений для автоматичної заміни зношеного інструмента 4 на новий інструмент, причому зношений інструмент через вихідний отвір робочого бака 1 скидається за його межі Запропонований маніпулятор прикріплений до стінки робочого бака 1 і складається з рухомого 11 і нерухомого 12 захватів, СПІВВІСНО розташованих порожнистого вала 13 і штока 14, верхня частина якого знаходиться за межами робочого бака 1 і через кульову опору 15 з'єднана з приводом 16 його осьового переміщення, а нижня частина виконана у вигляді сфери 17 і зв'язана з рухомим захватом 11 Нерухомий захват 12 жорстко з'єднаний з нижньою частиною порожнистого вала 13, верхня частина якого також знаходиться зовні робочого бака 1 і за допомогою важеля 18 з'єднана з хитним відносно нерухомої опори приводом 19 Рухомий 11 і нерухомий 12 захвати з'єднані один з одним за допомогою осі 20 і призначені для фіксації інструмента 4, що знаходиться між ними Привод 16 призначено для переміщення рухомого захвата 11 відносно нерухомого захвата 12, а привод 19 - для обертального руху порожнистого вала 13 відносно штока 14 і одночасного кутового переміщення інструмента 4 у напрямку до модуля інструмента 7 Запропонований модуль (виносний елемент II) призначено для подачі інструмента 4 при різанні радіоактивних матеріалів усередині робочого бака 1 і містить рухомий корпус 21 з встановленим у ньому СПІВВІСНО ведучим валом 22, шпиндельну го 45081 ловку 23 з шпинделем 24, рухому порожнисту консоль 25, що зв'язує рухомий корпус 21 з шпиндельною головкою 23, причому усередині консолі 25 установлена пасова передача 26 з метою привода шпинделя 24 і закріпленого на ньому інструмента 4 від ведучого вала 22, а верхня частина рухомого корпуса 21 розміщена зовні робочого бака 1 над його кришкою 2 і жорстко з'єднана з тягою 27 привода подачі інструмента 28 Механізм закріплення інструмента 6 (виносний елемент II) розміщений зовні робочого бака 1, виконаний у вигляді зйомного торцевого захвата 29, що переміщується поступально, з реверсивним обертанням і взаємодіє зі шпинделем 24 через отвір, виконаний у кришці 2 робочого бака 1 Усередині робочого бака 1 розміщується дощувальна установка ЗО, призначена для його дезактивації, насос зрошення 31 якої і його привод 32, а також привод 33 механізму закріплення інструмента 6 і привод інструмента 34, зв'язаний з ведучим валом 22, розташовані за межами робочого бака 1 Упор 35, що приводиться в дію приводом 36, призначений для установки на ньому матеріалу, що подрібнюється, 37, який закріплюється в затиску 38 з використанням привода 39 Штовхач 40, керований приводом 41, призначений для остаточного відділення (надламу) відрізаного фрагмента від матеріалу, що подрібнюється, 37 утому випадку, якщо інструмент 4 зробить неповний різ Привод 42 необхідний для створення обертального руху матеріалу, що подрібнюється, 37 щодо інструмента 4, а привод 43 - для вертикальної подачі матеріалу 37 Для збору відрізаних фрагментів матеріалу 37 використовується контейнер твердих ВІДХОДІВ 44, а для збору рідини після дезактивації робочого бака 1 - контейнер рідких ВІДХОДІВ 45 Процес різання матеріалів здійснюється наступним чином Матеріал, що подрібнюється, 37 при включеному приводі 43 подається в робочий бак 1 через проріз, виконаний у кришці 2, і після установлення на упор 35 і в штовхачі 40, закріплюється затиском 38 за допомогою привода 39 Після закінчення підготовчих робіт запускається в дію привод 42, у результаті чого приводиться в обертальний рух матеріал 37, одночасно включається в роботу привод 34, передаючи обертання шпинделю 24 з інструментом 4 через ведучий вал 22 і пасову передачу 26 Потім включається привод 28, що діє на тягу 27 і рухомий корпус 21, у результаті чого рухома консоль 25 разом з шпиндельною головкою 23 повертається навколо осі ведучого вала 22 і підводиться до матеріалу, що подрібнюється, 37 Обертовий інструмент 4 робить круговий різ у ТІЛІ матеріалу 37, після чого модуль інструмента 7 відводиться у бік, включається в роботу привод 41, який переміщує штовхач 40 ліворуч, що приводить до остаточного відділення відрізаного фрагмента від матеріалу 37 (утому випадку, якщо був зроблений неповний різ) Після закінчення цієї операції упор 35 за допомогою привода 36 переміщується вліво, а відрізаний фрагмент матеріалу 37 падає в контейнер твердих ВІДХОДІВ 44 Потім за допомогою привода 43 матеріал 37 опускається на упор 35 - і проводиться новий різ Заміна зношеного інструмента 4 проводиться з використанням маніпулятора 5 і механізму закріплення інструмента 6 Модуль інструмента 7 відводиться у вихідне положення, після цього включається в дію привод 19, який через важіль 18 приводить в обертальний рух порожнистий вал 13 і зв'язаний з ним нерухомий захват 12, при цьому в кульовій опорі 15 починає обертатися шток 14, тому що з ним через сферу 17 зв'язаний рухомий захват 11, а він, у свою чергу, за допомогою осі 20 з'єднаний з нерухомим захватом 12 Обидва захвата роблять кутове переміщення в напрямку до модуля інструмента 7 і, взаємодіючи з ним, обхоплюють технологічне оправлення (гайку), жорстко зв'язане з зношеним інструментом 4, після чого приводиться в дію привод 16, який переміщує шток 14 уздовж його осі, і тим самим здійснює фіксацію гайки разом з інструментом 4 Потім за допомогою привода 33 механізму закріплення інструмента 6 торцевий захват 29 переміщується вниз, з'єднується з шпинделем 24 і при СПІЛЬНІЙ взаємодії захватів 11 і 12 з однієї сторони й обертального руху торцевого захвата 29 привода 33 механізму закріплення інструмента 6 з іншої сторони відбувається згвинчування гайки разом з інструментом, що зносився, 4 зі шпинделя 24 Зношений інструмент 4 падає вниз і опиняється в контейнері твердих ВІДХОДІВ 44 Маніпулятор заміни інструмента 5 повертається у вихідне положення, після чого включається привод 10 замка 9 інструментального магазина З, при цьому замок 9 переміщується вправо і новий інструмент 4 з технологічним оправленням по похилій напрямній 8 сковзає вниз у робочий бак 1, потрапляючи технологічним оправленням у просвіт між рухомим 11 і нерухомим 12 захватами Знову включається в роботу привод 16, який, як описано вище, здійснює фіксацію гайки разом з інструментом 4 Потім захвати 11 і 12 разом з затиснутим ними інструментом 4 переміщуються в напрямку до модуля інструмента 7, після чого відбувається нагвинчування інструмента 4 на різьбову частину шпинделя 24 аналогічно тому, як це відбувалося при згвинчуванні зношеного інструмента 4, з тією лише різницею, що при нагвинчуванні інструмента 4 торцевий захват 29 обертається в зворотному напрямку Після закріплення інструмента 4 на шпинделі 24 торцевий захват 29 за допомогою привода 33 переміщується догори, виходячи з контакту з шпинделем 24 Після закінчення різання радіоактивних і інших матеріалів проводиться дезактивація внутрішньої поверхні робочого бака 1, для чого за допомогою привода 32 включається насос зрошення 31, який подає дезактивуючу рідину до дощувальної установки ЗО, при цьому названа рідина зливається в контейнер рідких ВІДХОДІВ 45 45081 ФІГ. 1 45081 Фіг. 2 Вид А технологічне вяення Фіг. З 10 11 45081 12 Фіг. 4 ДП "Український інститут промислової власності "(Укрпатент) Україна, 04119, Киів-119, вул сім'ї Хохлових, 15 (044) 456-20-90 6
ДивитисяДодаткова інформація
Автори англійськоюKarpachov Yurii Andriiovych, Tkachenko Viktor Maksymovych, Pilkevych Serhii Mykolaiovych
Автори російськоюКарпачев Юрий Андреевич, Ткаченко Виктор Максимович, Пилькевич Сергей Николаевич
МПК / Мітки
МПК: B23Q 3/155, G21F 9/28
Мітки: автоматичною, інструмента, різання, радіоактивних, матеріалів, верстат, заміною, абразивний
Код посилання
<a href="https://ua.patents.su/6-45081-abrazivnijj-verstat-z-avtomatichnoyu-zaminoyu-instrumenta-dlya-rizannya-radioaktivnikh-materialiv.html" target="_blank" rel="follow" title="База патентів України">Абразивний верстат з автоматичною заміною інструмента для різання радіоактивних матеріалів</a>
Пристрій для гідроабразивного різання радіоактивних відходів
Номер патенту: 43142
Опубліковано: 15.11.2001
Автори: Руденко Петро Михайлович, Іващенко Віталій Андрійович, Карпачов Юрій Андрійович, Сичов Михайло Валер'янович, Ткаченко Віктор Максимович
МПК: G21F 9/28
Мітки: радіоактивних, гідроабразивного, різання, пристрій, відходів
Формула / Реферат:
1. Пристрій для гідроабразивного різання радіоактивних відходів, що містить камеру різання з розташованою в ній установкою для подрібнювання відходів (матеріалів), підйомно-транспортну систему і герметичні контейнери для подрібнених відходів, який відрізняється тим, що в камері різання розміщений робочий бак з рідиною, у який герметично за допомогою гнучкого ущільнення вмонтована установка для подрібнення відходів, виконана у вигляді...
Верстат для оконтурення і розпилювання великогабаритних блоків твердих матеріалів
Номер патенту: 20317
Опубліковано: 15.03.2002
Автор: Аврамчук Ростислав Никифорович
МПК: B28D 1/02
Мітки: верстат, оконтурення, твердих, великогабаритних, матеріалів, блоків, розпилювання
Формула / Реферат:
Станок для оконтурення і розпилювання великогабаритних блоків (монолітів), укомплектований рамою, приводом, столом і робочим органом з чотирма блочками та ріжучим інструментом - алмазно-канатною пилкою, який відрізняється тим, що рама-естакада, на котрій розміщений стіл зі змінюваним за допомогою домкрата і продовжньої осі кутом нахилу відносно площини різання, змонтована на опорі де також встановлені передня і задня вертикальні стійки, між...
Спосіб дезактивації радіоактивних матеріалів
Номер патенту: 27086
Опубліковано: 28.02.2000
Автори: Бредбері Дейвід, Елдер Джордж Річард
МПК: G21F 9/28, G21F 9/00, G21F 9/04
Мітки: радіоактивних, дезактивації, матеріалів, спосіб
Формула / Реферат:
1. Способ дезактивации радиоактивных материалов, включающий контактирование материала, подлежащего дезактивации, с разбавленным раствором, содержащим карбонат, отличающийся тем, что контактирование материала, подлежащего дезактивации, с разбавленным раствором ведут в присутствии ионообменных частиц, которые либо содержат хелатинообразующие функциональные группы, либо связаны с ними, с последующим отделением ионообменных частиц из...
Спосіб закріплення радіоактивних матеріалів
Номер патенту: 25986
Опубліковано: 26.02.1999
Автори: Канцедал Валерій Петрович, Саенко Сергій Юр'євич, Тарасов Ростислав Васильович
МПК: G21F 9/34
Мітки: радіоактивних, матеріалів, закріплення, спосіб
Формула / Реферат:
Способ закрепления радиоактивных материалов высокой активности в защитном герметичном корпусе, стойком к выщелачиванию, включающий загрузку радиоактивного материала и засыпку защитного материала в металлический контейнер в форме сильфона, последующее прессование, герметизацию и окончательное горячее изостатическое прессование, отличающийся тем, что перед операциями прессования загрузку радиоактивного материала производят в стакан, закрывают...
Спосіб оброблення радіоактивних відходів фільтраційних целюлозних матеріалів
Номер патенту: 16188
Опубліковано: 29.08.1997
Автори: Уздеников Микола Борисович, Шараніна Людмила Георгієвна, Висоцький Сергій Павлович, Ружинський Володимир Миколаевич, Кузьменко Лідія Борисовна, Буркан Наталія Миколаєвна
МПК: G21F 9/30
Мітки: целюлозних, радіоактивних, оброблення, фільтраційних, спосіб, матеріалів, відходів
Формула / Реферат:
Способ обработки радиоактивных отходов фильтрационных целлюлозных материалов, включающий стадию термической обработки материала при температуре 105-230°С, отличающийся тем, что, с целью повышения фактора уменьшения объема и упрощения технологии, фильтрационный материал предварительно отмывается щелочным раствором, промывается демине-рализованной водой и обрабатывается раствором окислителя при массовом соотношении фильтрационный...
Попередній патент: Пристрій для видалення вологи з каната потоком повітря
Наступний патент: Спосіб та пристрій для очищення рідини
Випадковий патент: Пристрій для акустичної локації