Екологічно чистий двигун

Формула / Реферат
Екологічно чистий двигун, який має робоче колесо, встановлене на опори підшипників вала, з'єднаного із ступицею, обід якого поділений на рівні частини спицями, з'єднаними з ободом та ступицею, який відрізняється тим, що на спицях встановлені вантажі на кульках, вставлених у заглиблення вантажів тав жолобки з усіх чотирьох сторін спиці з можливістю руху вантажів поздовж спиць, та встановлені з обох сторін робочого колеса зв'язки, однакового з ним радіуса заокруглення, закріплені в нерухомій опорі (10) та рухомій опорі (9) з можливістю її переміщення по горизонталі.
Текст
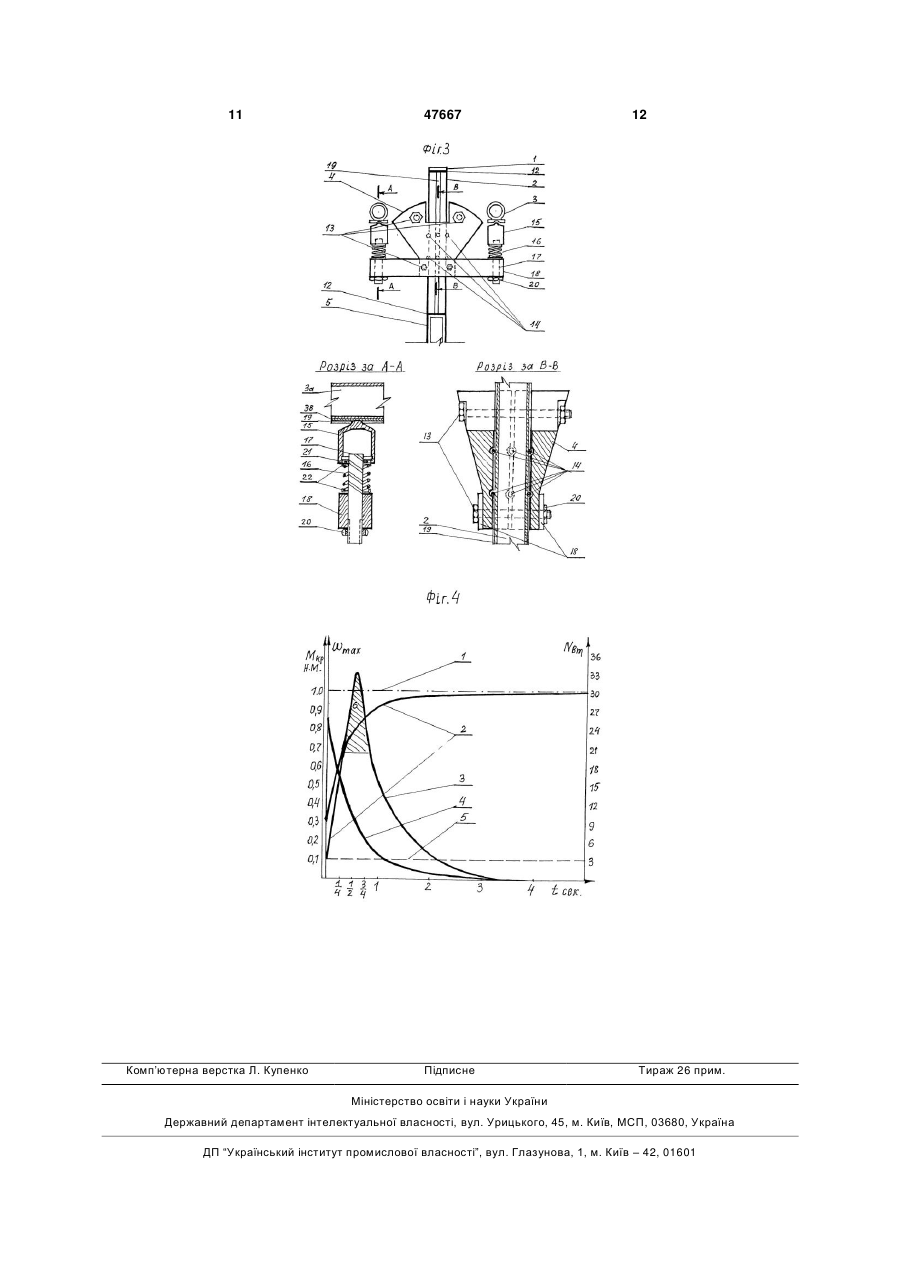
Екологічно чистий двигун, який має робоче колесо, встановлене на опори підшипників вала, з'єднаного із ступицею, обід якого поділений на 3 осі обертання робочого колеса, який передається на вал робочого колеса. У пристрої, що заявляється, збільшується кутова швидкість а отже й потужність, здійснюється екологічно чистий двигун незалежний від традиційних енергоносіїв, без шкідливих викидів у атмосферу та з можливістю використання в будь-якій географічній точці земної кулі. На Фіг.1 подано схему пристрою, що заявляється, на Фіг.2 схему дії сил при роботі пристрою, на Фіг.3 показано конструктивне виконання спиць, вантажів, зв'язків та конструкцію пристрою, який забезпечує тертя кручення при рухові вантажів поздовж зв'язків. Фіг.4 відображає часовий графік роботи двигуна та залежність показників крутного моменту і потужності пристрою в залежності від кутової швидкості обертання. Екологічно чистий двигун, що заявляється, має робоче колесо розділене спицями 2 на дванадцять рівних частин та зв'язки 3 розташовані з обох боків робочого колеса і закріплені на нерухомій опорі 10, та рухомій опорі 9. Робоче колесо має обід 1, дванадцять спиць 2, дванадцять вантажів 4, ступицю 5, вал 6, два підшипники 7 встановлених на опорах 8. Вантажі 4 з двох рівних частин, які з'єднуються на спиці 2 після встановлення кульок 14, болтами 13. На коромислі 18 встановлюються гвинт Архімеда 17, стакани 22, пружина 16, опорний підшипник 21, циліндр 15, який рухається по жолобку 19. По аналогічних жолобках 19 на спицях 2, рухаються кульки 14. Болти 13 і гвинт Архімеда 17 затягуються гайками 20. Стрілкою 11 показано напрям обертання робочого колеса при роботі двигуна. Фіг.2 зображує схему дії сил при роботі двигуна. Початок осей координат розташовано на осі обертання О. Стрілками показано діючі сили та реакції опор зв'язків і підшипників робочого колеса, де: 24 та 31 - реакції опор 9, та 10 по осі ординат; 30 та 23 - реакції цих опор по осі абсцис; 28 - реакція підшипника 7 по осі ординат; 27 - реакція підшипника 7 по осі абсцис; 26 - власна вага робочого колеса; 25 - сила тяжіння вантажів 4; 29 відцентрова сила інерції вантажів 4; 33 - нормальна реакція зв'язків на дію відцентрової сили інерції 29 вантажів 4; 32 - сила тертя, яка виникає під дією нормальної реакції 33 при рухові вантажів 4 по зв'язках 3. Часова діаграма роботи двигуна на Фіг.4 показує залежність показників максимально можливої кутової швидкості двигуна від часу в секундах, та залежність крутного моменту відносно осі обертання в ньютонах на метр та потужності у ватах. Крива 2 відображає залежність кутової швидкості обертання двигуна при початковій кутовій швидкості 5, до досягнення максимально можливої кутової швидкості 1, в десятих частинах цієї швидкості. Крива 4 показує залежність значень крутного моменту від кутової швидкості, а крива 3- залежність потужності від кутової швидкості і крутного моменту. Заштрихована ділянка 6 показує найсприятливіші показники роботи двигуна для вибору їх значень при конструюванні пристрою. Для побудови графіка бралися значення для двигуна діаметром 47667 4 0,5 метрів і масою вантажів 0,2 кілограмів. Відомості, які підтверджують можливість здійснення корисної моделі. Екологічно чистий двигун, що заявляється, виконується у вигляді робочого колеса поділеного спицями 2 на дванадцять рівних частин, які з'єднуються з ободом 1 і ступицею 5 зварюванням. Ступиця 5 з'єднується з валом 6 шпоночним або шліцьовим з'єднанням в залежності від навантажень. Вал 6 обертається в підшипниках 7, які встановлюються на опорах 8. На спицях 2 встановлюються вантажі 4, які виконуються з двох однакових частин для забезпечення можливості встановлення при збиранні восьми кульок 14, які рухаючись вільно, без перешкод по змащеній поверхні проточених жолобків 19, забезпечують вільний рух вантажів 4 по спицях 2 під дією відцентрової сили інерції під час роботи двигуна. Після встановлення кульок 14, частини вантажів 4 з'єднуються на спицях 2 болтами 13. Спиці 2 мають квадратний переріз, що забезпечує незмінне положення вантажів 4 відносно обода і зв'язків. Розміри перерізу спиць та спосіб їх з'єднання із ободом 1 і ступицею 5, визначаються розрахунком на міцність. На коромислах 18, закріплених на вантажах 4 двома болтами 13 встановлюються з обох боків пристрої для забезпечення тертя кручення при рухові вантажів 4 по зв'язках 3. Ці пристрої вставляються в отвори на коромислі і закріплюються шляхом затягування гайки 20 із зовнішнього боку та опорного стакана 22, який є частиною гвинта Архімеда 17. З метою запобігання миттєвому притисканню циліндра 15 порожнього всередині, під дією нормальної реакції зв'язків 3, до коромисла 18, встановлюється пружина 16, яка закріплюється на коромислі 18 в опорному стакані, який є складовою частиною гвинта Архімеда 17, а на циліндрі 15 у стакані 22, який є частиною опорного підшипника 21, який забезпечує безперешкодне з боку дії пружини 16 обертання циліндра 15 при рухові поздовж гвинта Архімеда 17 під дією реакції зв'язків 3. Зовнішня частина циліндра 15, яка рухається по проточеному жолобку 19 зв'язків 3 виконується сферичної форми, шліфується і загартовується з метою довгочасної експлуатації. Аналогічний обробіток проводиться на жолобках 19 на зв'язках 3 і спицях 2. З метою зниження рівня шуму та компенсації ударних навантажень під час запуску та зупинки двигуна, на ободі 1 та ступиці 5 встановлюються резинові подушки 12. Виконанням вантажів 4 каплевидної форми досягається те, що їх центр тяжіння під час руху по зв'язках 3 розташовується на відстані пів-радіуса, а при притисканні до обода 1 - радіуса від осі обертання, чим забезпечується відповідність конструкції пристрою розрахунку. Для забезпечення запуску двигуна діаметр ступиці 5 знаходиться з того, щоб при розташуванні на ній вантажів 4 центр тяжіння їх був віддалений на третину довжини радіуса двигуна від осі обертання. Зв'язки 3 виконуються із стальних труб 3а, переріз яких встановлюється розрахунком на міцність, та стальної полоси 3в з проточеним, відшліфованим і загартованим жолобком 19. Труба 3а і 5 полоса 3в після надання їм необхідної форми зварюються. Радіус заокруглення зв'язків 3 дорівнює радіусу робочого колеса із зміщенням центру заокруглення на пів-радіуса вліво від осі обертання двигуна. Наявність в конструкції зв'язків 3 труб передбачає можливість циркуляції по них охолоджувальної рідини для відведення тепла від тертя при рухові вантажів 4 по зв'язках 3. На нерухомій опорі 10 зв'язки закріплюються болтом з можливістю провертання, на рухомій опорі 9 слід передбачити гвинтовий або гідравлічний механізм, в залежності від навантаження, для відведення зв'язків у крайнє праве положення для зупинки двигуна. На валу 6, відповідно до розрахункових навантажень, слід передбачити встановлення шківа або зубчатої шестерні для запуску двигуна. При незначних навантаженнях можливий запуск вручну з допомогою пускової рукоятки. Всі елементи пристрою, що заявляється, крім вантажів 4, виконуються із сталі. Вантажі 4- із чавуна. Розмір кульок 14 встановлюється в залежності від маси вантажів 4 та підбирається з використовуваних при виготовленні кулькових підшипників. Підшипники 7 та 21 підбираються відповідно до діючих стандартів в залежності від навантажень. В статичному стані пристрій, що заявляється, перебуває при переміщенні рухомої опори 9 в крайнє праве положення, при якому зв'язки 3 знаходяться на відстані радіуса від осі обертання. При цьому робоче колесо є нерухомим, п'ять вантажів 4 у нижньому секторі колеса лежать на ободі 1, п'ять вантажів 4 у верхньому секторі на ступиці 5, два вантажі 4 по осі абсцис можуть займати будь-яке рівновіддалене положення на спицях 2 від осі обертання. Тобто, двигун без загальмовування, буде знаходитися в нестійкій рівновазі. Тому передбачається гальмування валу 6 робочого колеса при зупинці двигуна з метою безпеки. Екологічно чистий двигун працює таким чином. Вал 6 пристрою, що знаходиться в статичному стані розгальмовується. Далі зміщуємо та закріплюємо рухому опору 9 в положення при якому зв'язки 3 будуть розташовані у правій частині двигуна на відстані пів-радіуса від осі обертання по осі абсцис. Після цього робочому колесу через вал 6 за рахунок зовнішнього джерела енергії надається початкова кутова швидкість обертання необхідна для того, щоб вантажі 4 під дією відцентрової сили інерції рухаючись поздовж спиць 2 зайняли крайнє положення в лівій частині робочого колеса на ободі 1 і зв'язках 3 у правій частині. Початкову кутову швидкість обертання знаходимо з того, що відцентрова сила інерції повинна бути більша, або дорівнювати вазі вантажу. В пристрої найменше значення відцентрової сили інерції буде при знаходженні вантажів 4 на ступиці 5 на відстані третини довжини радіуса від осі обертання. Отже: 3g/R Fc m 20 ⅓R mg; звідси: 0 Де: Fс - відцентрова сила інерції вантажів 4; m - маса одного вантажу 4; 0 - найменше значення початкової кутової швидкості обертання; g - прискорення вільного падіння; R - радіус двигуна; 47667 6 Після надання двигуну необхідної початкової кутової швидкості обертання відключаємо зовнішнє джерело енергії. Двигун працює під дією крутного моменту створеного силами тяжіння вантажів 4 та різниці в плечах. У лівій частині двигуна плече по осі абсцис дорівнює радіусу, у правій - піврадіуса. Реакції 27 та 28 підшипників 7, реакції 23; 24; 30; 31 зв'язків 3 та крутний момент відносно осі обертання знаходимо підрахунком. Вважаємо, що моменти сил, які діють проти часової стрілки, позитивні, а за часовою стрілкою негативні. При підрахунку враховуємо, що нормальна реакція 33 зв'язків 3 викликана дією відцентрових сил інерції 29 вантажів 4 спрямована не до центру обертання О, а до центру заокруглення зв'язків 3 і відповідні цим реакціям сили тертя 32 перпендикулярні до радіусів заокруглення зв'язків 3 та те, що реакції зв'язків і сили тертя пропорційні відцентровим силам інерції 29 вантажів 4 і залежать від відстані від центра обертання робочого колеса до зв'язків 3 та обода 1 , які знаходимо із подібності трикутників, вершини яких розташовані в центрі обертання двигуна та центрі заокруглення зв'язків при роботі двигуна, а спільні вершини у місцях знаходження вантажів на зв'язках і їх проекції на ось абсцис при кутах між осю абсцис і розташованими вантажами на зв'язках: 30; 60 і 90 градусів. Реакції зв'язків: 2 Х= -R9x- R10x+ 2m RSin.60 Cos.30 Cos.60° + 2 2m R Cos.30°Cos.60° + 2m 2RCos.75Cos.15Cos.15/Cos.60+0,5m 2R=0; R9x + R10x = 3,06m 2R; R9x = R10x =1,53m 2R; Де: R9x - реакція 23 опори 9 по осі абсцис; R10x - реакція 30 опори 10 по осі абсцис; m - маса одного вантажу 4; ω - кутова швидкість двигуна; R - радіус робочого колеса двигуна; Y= R9y+R10y-0,5fdm 2R-2fdm 2R Sin.60°Cos.30°Cos.60 -2fdm 2R Cos.30°Cos.60°2fdm 2RCos.75 Cos.15Cos15/Cos.60=0; R9y = R10y= 1,53fdm 2R Де: R9y - реакція 24 опори 9 по осі ординат; R10y - реакція 31 опори 10 по осі ординат; fd - динамічний коефіцієнт тертя; m - маса одного вантажу 4; ω - кутова швидкість двигуна; R - радіус робочого колеса двигуна; Реакції підшипників: Х= Хо - Fc - 2FcSin.30° -2FcSin.60°= Xo 2 2 2 2 m R - 2 m R0,5 - 2 m R0,866=Xo- 3,73 m R= 2 0; Xo= 3,73 m R Де: Xo - реакція 27 підшипника 7 по осі абсцис; Fc - відцентрова сила інерції 29 вантажів 4; m - маса одного вантажу 4; ω - кутова швидкість двигуна; R - радіус робочого колеса двигуна; ΣΥο = -Yo + Q + 10Р + Ft +2FtCos.15°+ 2FtCos.30° +2FtCos.60°= 0; Підставляючи значення, одержуємо: Yo = Q + 10P + 3,06 fdm 2R Де: Yo - реакція 28 підшипника 7 по осі ординат; 7 Q - власна вага 26 робочого колеса; Ρ - вага 25 одного вантажу 4; Ft - сила тертя 32; fd - динамічний коефіцієнт тертя; m - маса одного вантажу 4; ω - кутова швидкість двигуна; R - радіус робочого колеса двигуна; Вантажі 4 у верхній і нижній точках по осі ординат не впливають на реакцію 28 підшипника 7, позаяк вони рухаються по спицях 2 безперешкодно. Мкр.= PR + 2PRCos.30° +2PRCos.60° -0,5PR Cos.75 Cos.60 2PR /Cos.60 Cos.30°- 2PR /Cos.30 Cos.60 - 0,5 2 2 Cos.75Cos.15Cos15 fdm R0,5R2 fdm R /Cos.60 Cos75 2 Cos.60 R /Cos.60-2 fdm R Cos.30°Cos.60° R /Cos.30 -2 2 fdm RSin.60 Cos.30°Sin.60 RSin.60 = 1,759PR2,88fdm 2R2; Де: Мкр. - крутний момент відносно осі обертання О робочого колеса двигуна; Ρ - вага одного вантажу 4; R - радіус робочого колеса двигуна; fd - динамічний коефіцієнт тертя; m - маса одного вантажу 4; ω - кутова швидкість двигуна; Позначивши величину 2,88fdR2m = μ, а величину 1,759PR = Mo, одержуємо: Мкр.= Мо - μω2, де: Мкр- крутний момент двигуна; fd - динамічний коефіцієнт тертя; R - радіус робочого колеса двигуна; m - маса одного вантажу 4; μ - коефіцієнт опору; Мо - момент сил відносно осі обертання; Ρ - вага одного вантажу 4; R - радіус робочого колеса двигуна; ω - кутова швидкість двигуна; Рівняння обертального руху двигуна відповідно з принципом Даламбера знаходимо з того, що сума моментів відносно осі обертання активних сил і сил інерції дорівнює нулю. Мо=0; Μο-μω2 Ǐ0d /dt =0; звідси: Ι0d /dt =Μο - μω2 Де: Мо - момент сил відносно осі обертання; μ - коефіцієнт опору; ω - кутова швидкість двигуна; І0 - сума моментів інерції колеса двигуна та вантажів відносно осі обертання; d / dt - кутове прискорення двигуна; Розділюючи змінні, та позначивши відношення μ /Ιο = n, беремо від обох частин рівності відповідні визначені інтеграли, 0 - d /Мо -μω2= -n t0 dt. Звідси: Μo-μω2 Μο-μω2/ -nt 1n /Μo = -nt. абo: Μο = е Звідси: Мо -nt ω= / (1 - е ) Де: ω - кутова швидкість двигуна; Мо - момент сил відносно осі обертання; μ - коефіцієнт опору; n - відношення коефіцієнта опору до суми моментів інерції колеса та вантажів двигуна відносно осі обертання; t - час обертання двигуна в секундах; Кутова швидкість двигуна з часом зростає, наближаючись до максимально можливого значення Μο ωmax= /μ. 47667 8 Де: ωmax - максимально можлива кутова швидкість двигуна; Мо - момент сил відносно осі обертання; μ - коефіцієнт опору; При цьому початкова кутова швидкість двигуна, яка надається двигуну зовнішньою силою, є складовою загальної кутової швидкості тому, що без крутного моменту двигуна вона не буде зберігатися на заданому рівні. Суть значення максимально можливої кутової швидкості двигуна полягає в тому, що двигун внаслідок прискорення викликаного дією крутного моменту після запуску двигуна за певний час набуває максимально можливої кутової швидкості, внаслідок чого момент сил відносно осі обертання та опір рухові, який пропорційний добутку динамічного коефіцієнта тертя, маси вантажу 4, квадрату радіуса та квадрату кутової швидкості двигуна зрівнюються і крутний момент двигуна дорівнює нулю. При цьому кутова швидкість обертання двигуна буде постійна (точніше з амплітудою позаяк при зменшені максимально можливої кутової швидкості під дією сил інерції крутний момент зросте і навпаки). По аналогії з двигуном внутрішнього згорання це буде режим холостого ходу двигуна. При прикладенні корисного навантаження максимально можлива кутова швидкість зменшиться, значення крутного моменту зросте і двигун буде виконувати корисну роботу. Завдяки цьому двигун має здатність до саморегуляції в залежності від навантаження. При конструюванні двигуна слід це враховувати, обираючи значення необхідного крутного моменту і кутову швидкість обертання меншу за максимально можливу та більшу за початкову з врахуванням можливих перевантажень. Як видно з графіка зображеного на Фіг.4, найбільш прийнятні умови роботи двигуна будуть при кутовій швидкості в межах від 0,67 до 0,85 максимально можливої кутової швидкості. При цьому забезпечується кручення кульок по зв'язках без ковзання, тобто зв'язки є ідеальними. Зупинка двигуна здійснюється шляхом відведення зв'язків 3 в крайнє праве положення за допомогою рухомої опори 9, при якому плечі вантажів у лівій та правій частинах зрівнюються, та гальмування валу 6. Враховуючи це, проводимо конструювання двигуна в залежності від необхідних потужності, кутової швидкості обертання та крутного моменту. Багатоступінева конструкція двигуна надасть можливість забезпечити необхідну потужність і крутний момент. Позаяк до коефіцієнта опору входить радіус двигуна у квадраті, то для збільшення крутного моменту слід застосовувати збільшення маси вантажу, яка обмежується лише міцністю матеріалів з яких виготовляється двигун. Позаяк в даній механічній системі центр мас нерухомий двигун динамічно врівноважений. Динамічні навантаження на підшипники та опори зв'язків, у зв'язку з кінцевим значенням максимально можливої кутової швидкості, мають кінцеве значення і піддаються розрахунку. Координати центра тяжіння двигуна будуть: Хс= - 1.759PR/Q+12P; Υс=0; 9 Де: Хс - координата центра тяжіння двигуна по осі абсцис; Ρ - вага одного вантажу 4; R - радіус робочого колеса двигуна; Q - власна вага робочого колеса; Yc - координата центра тяжіння двигуна по осі ординат; Координати центра тяжіння (центра мас) робочого колеса двигуна зміщені вліво від осі обертання по осі абсцис та залишаються нерухомими в будь-якому положенні вантажів 4, тому потенційна енергія системи дорівнює нулю, а кінетична енергія, створена дією крутного моменту двигуна, із зростанням кутової швидкості перетворюється в теплову енергію у повній відповідності із законом збереження механічної енергії. В пристрої сила тяжіння вантажів 4 є активною зовнішньою силою, яка створює крутний момент, що підтверджує мо 47667 10 жливість здійснення корисної моделі. Адже при обертальному русі немає значення, який характер має сила, що створює крутний момент. Буде це потенційна сила тяжіння, чи сила тиску газів на поршень при згоранні палива в двигуні внутрішнього згорання, чи сила тиску пари в парових двигунах. В усіх випадках, при рівних значеннях сили і плеча модуль добутку сили на плече буде дорівнювати рівнозначному моменту сили і виконуватиме роботу. Техніко-економічні переваги пристрою, що заявляється, у порівнянні з пристроєм - прототипом, полягають у можливості застосування в будь-якій географічній точкі земної поверхні, одержанні більшого крутного моменту та потужності при менших розмірах за рахунок виконання багатоступеневої конструкції та збільшення кутової швидкості двигуна. 11 Комп’ютерна верстка Л. Купенко 47667 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPollution-free engine
Автори англійськоюKramarenko Vitalii Nykyforovych
Назва патенту російськоюЭкологически чистый двигатель
Автори російськоюКрамаренко Виталий Никифорович
МПК / Мітки
МПК: F03B 17/04
Мітки: екологічної, двигун, чистий
Код посилання
<a href="https://ua.patents.su/6-47667-ekologichno-chistijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Екологічно чистий двигун</a>
Екологічно чистий літальний апарат комбінований з вітроенергетичною установкою
Номер патенту: 58329
Опубліковано: 15.07.2003
Автор: Калюжний Валерій Вілінович
МПК: B64B 1/24, B64B 1/06, F03D 9/02
Мітки: апарат, вітроенергетичною, чистий, літальний, екологічної, установкою, комбінований
Формула / Реферат:
Літальний апарат, комбінований з вітроенергетичною установкою, який виконано у вигляді дирижабля з циліндричним газозаповненим корпусом, звуженим на кінцях і оснащеним рулями управління польотом, гондолою для розміщення в ній людей і обладнання, який відрізняється тим, що додатково забезпечений накопичувачем енергії, виконаним у вигляді набору акумуляторів, які є одночасно баластом дирижабля, а також корпус дирижабля виконаний у вигляді...
Екологічно чистий спосіб одержання енергії з вугілля
Номер патенту: 77679
Опубліковано: 15.01.2007
Автори: Лобіс Террі Джеймс, Калдерон Альберт
МПК: C10J 3/02
Мітки: чистий, одержання, екологічної, вугілля, енергії, спосіб
Формула / Реферат:
1. Екологічно чистий спосіб переробки вугілля, який полягає в тому, що вугілля завантажують в герметичну реакційну камеру із завантажувальним і розвантажувальним кінцями;вугілля переміщають усередині реакційної камери до розвантажувального кінця;в реакційну камеру інжектують, по суті, чистий кисень, призначений для спалювання порції вугілля під тиском у відновлювальній атмосфері з одержанням:1) теплової енергії,...
Спосіб формування кутових мікропереміщень вала п’єзоелектричного двигуна та п’єзоелектричний двигун, що його реалізує
Номер патенту: 67848
Опубліковано: 15.07.2004
Автор: Петренко Сергій Федорович
МПК: H02N 2/00, H01L 41/09
Мітки: мікропереміщень, п'єзоелектричного, формування, п'єзоелектричний, спосіб, двигун, реалізує, двигуна, вала, кутових
Формула / Реферат:
1. Спосіб формування кутових мікропереміщень вала п’єзоелектричного двигуна, що включає формування пускового моменту за допомогою зворотного п’єзоелектричного ефекту, який відрізняється тим, що кутові мікропереміщення формують з ділянки розгону, на якій прикладено пусковий момент і ділянки гальмування при знятті пускового моменту, при цьому кутові мікропереміщення вала на ділянці розгону формують у відповідності з рівнянням
Двигун

Номер патенту: 47606
Опубліковано: 10.02.2010
Автор: Синиця Володимир Степанович
МПК: F03G 7/00
Мітки: двигун
Формула / Реферат:
Двигун, що містить колесо, жорстко закріплене на валу, який на підшипниках встановлений на станині, та прямокутні вантажі, який відрізняється тим, що має два вали, які на підшипниках встановлені на станині, на кожному валу жорстко закріплені по два колеса з пазами та виступами і зубчасте колесо, причому відстань між валами така, щоб колеса одного вала не торкалися другого вала, та має вантажі, які висять на ланцюгах між колесами, а з кожного...
Двигун
Номер патенту: 38396
Опубліковано: 12.01.2009
Автор: Синиця Володимир Степанович
МПК: F03G 7/00
Мітки: двигун
Формула / Реферат:
Двигун, що містить колесо, жорстко закріплене на валу, який на підшипниках встановлений на станині, та прямокутні вантажі, який відрізняється тим, що на станині жорстко закріплені сектори зубчастих коліс, а на осях, які жорстко закріплені на колесі, висять вантажі, які жорстко закріплені на важелях, а важелі жорстко закріплені на зубчастих колесах, причому зубчасті колеса мають виріз для упора, а на других осях, які жорстко закріплені на...
Попередній патент: Спосіб виготовлення піци
Наступний патент: Цитореспірометр
Випадковий патент: Пристрій для захисту перешкоди від надшвидкісних засобів ураження