Плаваючий екскаватор
Номер патенту: 52426
Опубліковано: 25.08.2010
Автори: Ковтунович Іван Васильович, Бойко Григорій Ярославович, Войтович Іван Васильович, Савоченко Володимир Васильович, Зайцев Леонід Павлович, Бойко Володимир Михайлович, Мартинюк Григорій Федосьович
Формула / Реферат
1. Плаваючий екскаватор для очистки водойми від замулення, що містить плавзасіб, з використанням циліндричних порожнистих понтонів з гвинтовими гребними стрічками правої і лівої навивки, основну раму, поворотну платформу, двигун, гідросистему і електросистему, стрілу з ковшем і противагу, який відрізняється тим, що для зручного переходу плавзасобу з транспортного положення в робоче і назад, забезпечення надійної остійності на плаву, покращення маневрування на воді при переході з однієї захватки до іншої методом почергової перестановки паль з почерговим вмиканням приводу понтонів, підвищення якості робіт за рахунок виключення пропусків при очистці плавзасіб виконаний із двох порожнистих циліндричних реверсивних понтонів з гвинтовими гребними стрічками правої і лівої навивки, змонтованих в дві П-подібних рами із пальним обладнанням на кінцях і з можливістю одночасного і паралельного переміщення П-подібних рам з понтонами відносно поздовжньої осі основної рами.
2. Плаваючий екскаватор за п. 1, який відрізняється тим, що П-подібні рами зв'язані з основною рамою двома парами балок з зубчастими рейками, замкнутими в напрямних, жорстко закріплених на основній рамі, при цьому в кожній парі напрямних балки повернені одна до іншої зубчастими рейками, між якими розміщено взаємодіюче з ними циліндричне зубчасте колесо, встановлене на вертикальному валу, розміщеному на подовжній осі основної рами, на кінці якого встановлено конічне зубчасте колесо для приводу.
3. Плаваючий екскаватор за п. 2, який відрізняється тим, що привід зубчастого колеса кожної пари балок з рейками зв'язаний з гідромоторами, що приводяться від одної секції електричного гідророзподільника гідросистеми через стандартний розподільник потоку, що забезпечує синхронне обертання валів цих гідромоторів.
4. Плаваючий екскаватор за п. 2, який відрізняється тим, що на кінцях напрямних балок встановлені електричні кінцеві вимикачі, електрично з'єднані з одною секцією електричного гідророзподільника екскаватора, а на зубчастих рейках змонтовані регульовані контактні важелі, при взаємодії яких з електричним кінцевим вимикачем гідророзподільник виключає гідромотор приводу зубчастого колеса.
5. Плаваючий екскаватор за п. 1, який відрізняється тим, що на кінцях основної рами паралельно її поперечній осі жорстко закріплені дві пари напрямних для двох пар гладких балок, що розташовані в середині, при цьому одні кінці гладких балок закріплені до П-подібних рам, а інші вільно розміщені в напрямних.
6. Плаваючий екскаватор за пп. 2, 5, який відрізняється тим, що довжина балок з зубчастими рейками і гладких балок однакова, при цьому в транспортному положенні екскаватора вільні кінці балок розміщені в створі зовнішньої твірної циліндричного понтона.
7. Плаваючий екскаватор за п. 1, який відрізняється тим, що на кінцях П-подібних рам шарнірно закріплена напрямна коробка, для переміщення в них по одній палі з зубастою рейкою, що взаємодіє з зубчастим колесом, що обертається за допомогою гідромотора з можливістю його реверсування, а до зовнішніх бокових сторін коробок жорстко закріплені шипи для з'єднання з головками штоків гідроциліндрів, корпуси яких шарнірно зв'язані з П-подібною рамою, і які в запертому положенні виконують жорсткий зв'язок П-подібної рами з напрямною коробкою.
Текст
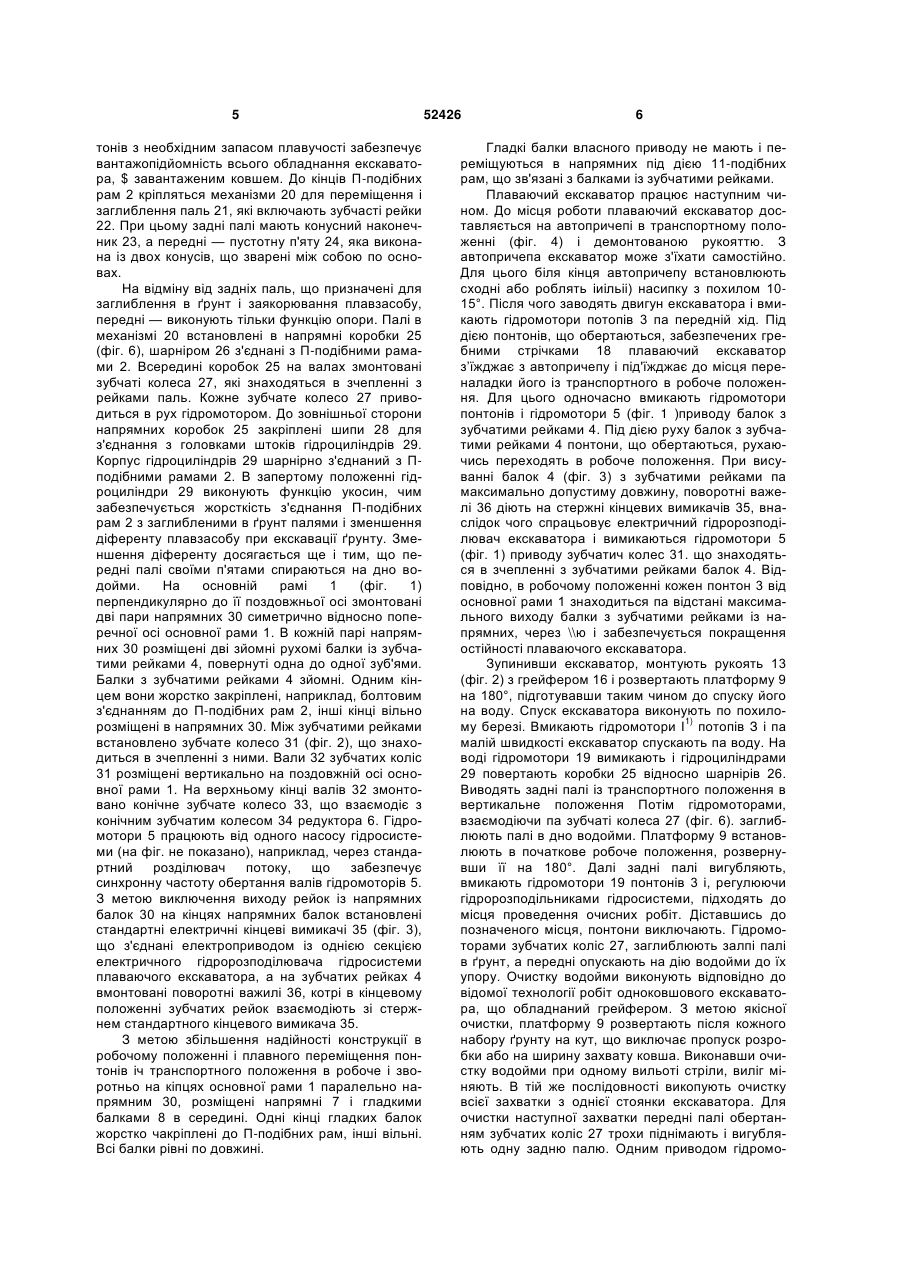
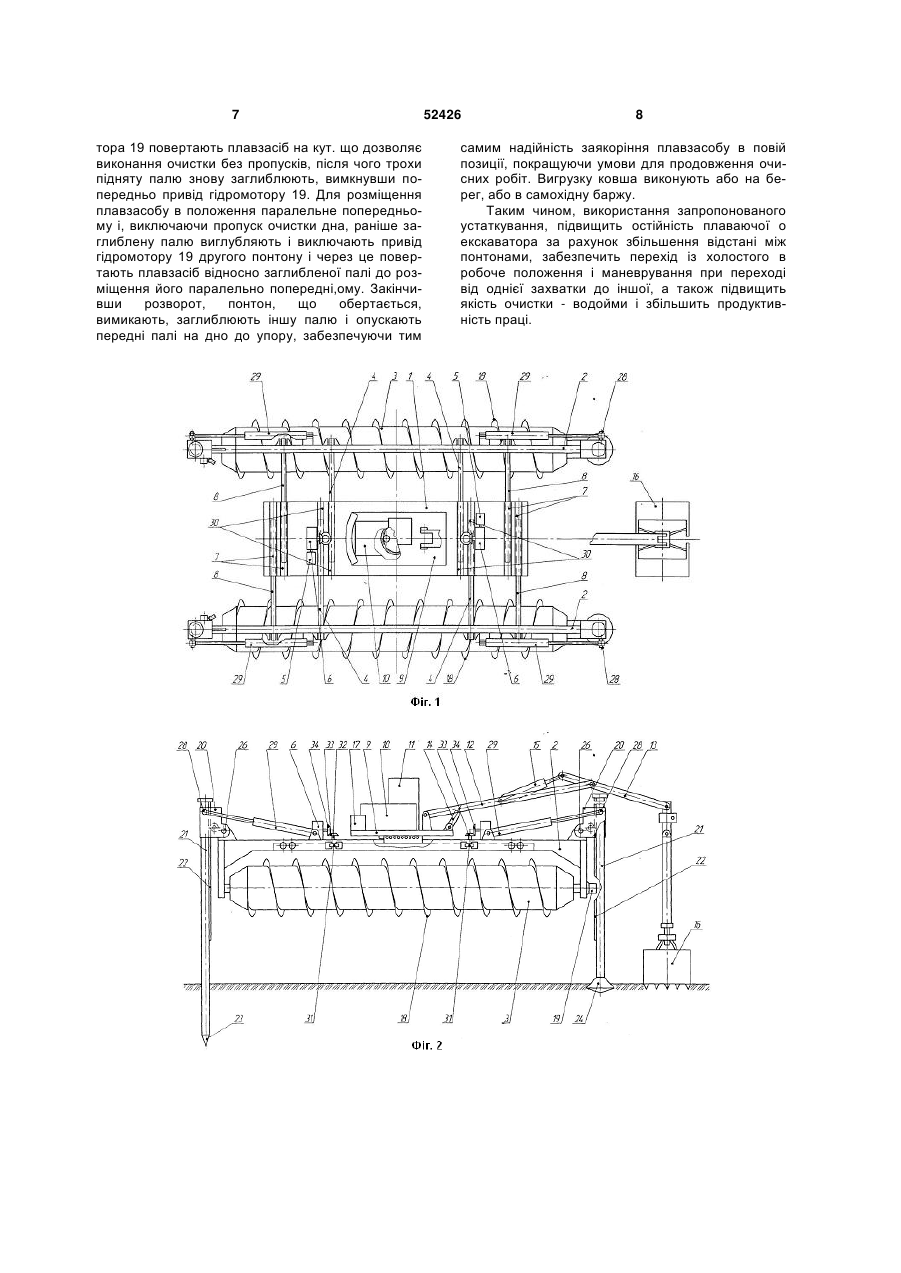
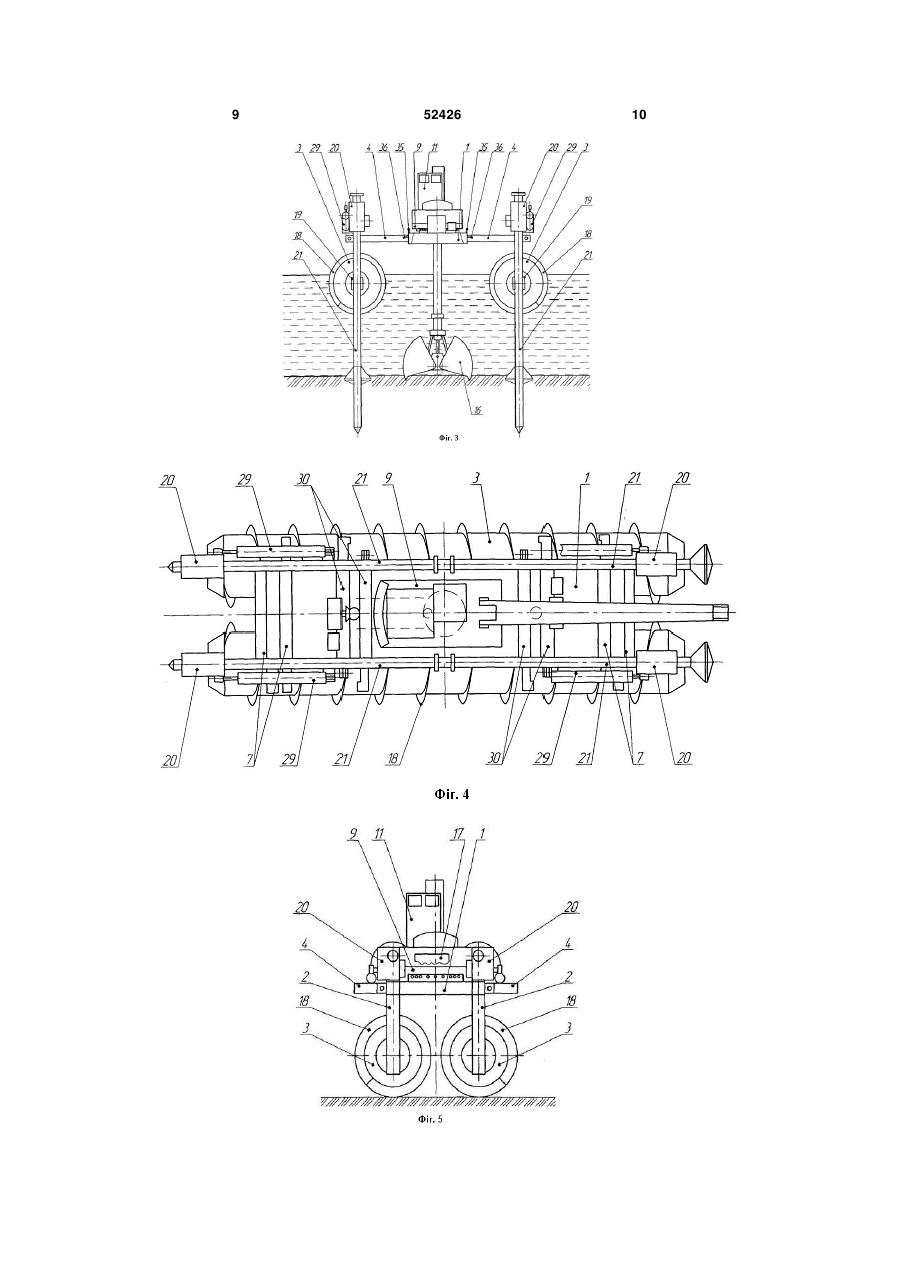
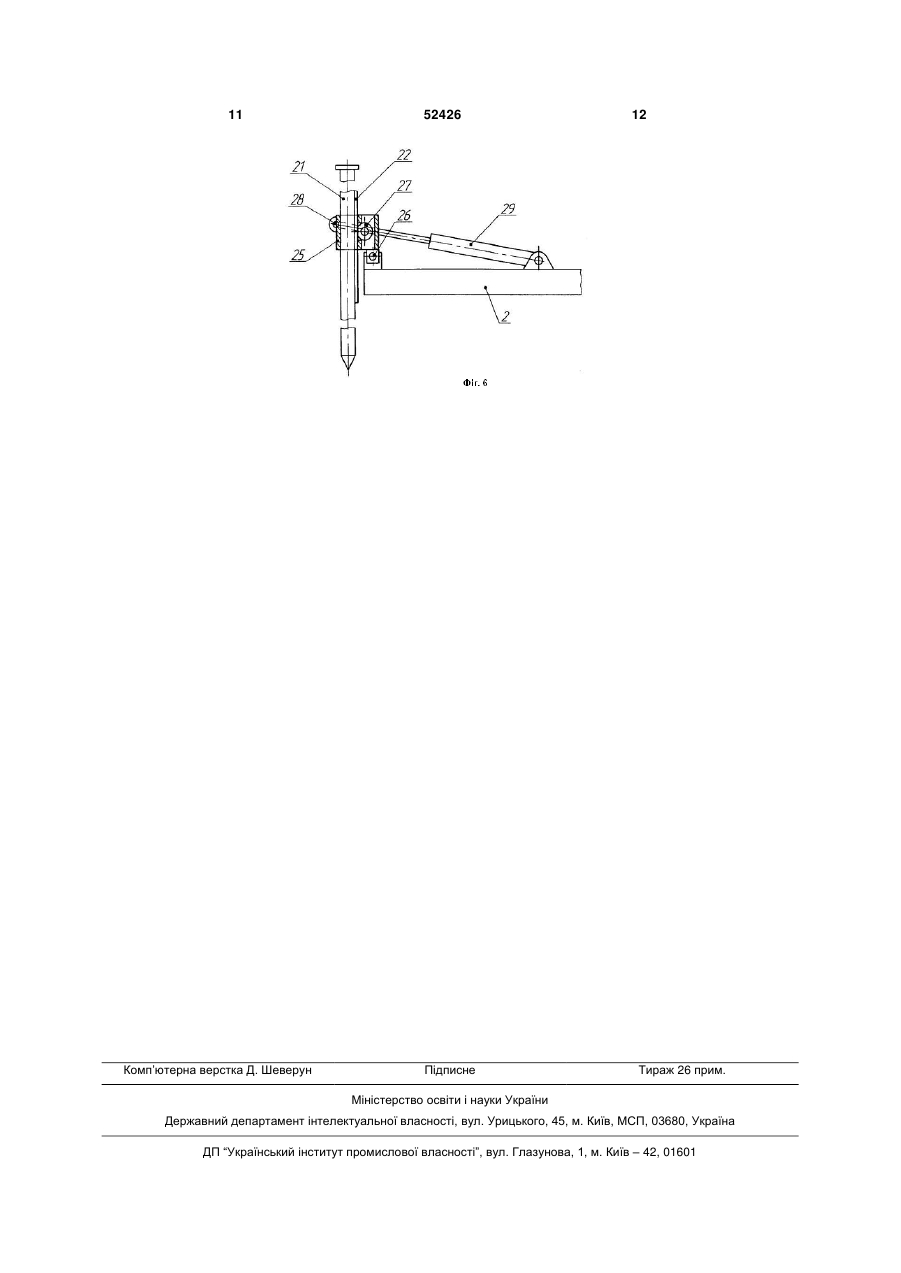
1. Плаваючий екскаватор для очистки водойми від замулення, що містить плавзасіб, з використанням циліндричних порожнистих понтонів з гвинтовими гребними стрічками правої і лівої навивки, основну раму, поворотну платформу, двигун, гідросистему і електросистему, стрілу з ковшем і противагу, який відрізняється тим, що для зручного переходу плавзасобу з транспортного положення в робоче і назад, забезпечення надійної остійності на плаву, покращення маневрування на воді при переході з однієї захватки до іншої методом почергової перестановки паль з почерговим вмиканням приводу понтонів, підвищення якості робіт за рахунок виключення пропусків при очистці плавзасіб виконаний із двох порожнистих циліндричних реверсивних понтонів з гвинтовими гребними стрічками правої і лівої навивки, змонтованих в дві П-подібних рами із пальним обладнанням на кінцях і з можливістю одночасного і паралельного переміщення П-подібних рам з понтонами відносно поздовжньої осі основної рами. 2. Плаваючий екскаватор за п. 1, який відрізняється тим, що П-подібні рами зв'язані з основною рамою двома парами балок з зубчастими рейками, замкнутими в напрямних, жорстко закріплених на основній рамі, при цьому в кожній парі напрямних балки повернені одна до іншої зубчастими рейками, між якими розміщено взаємодіюче з ними циліндричне зубчасте колесо, встановлене на вертикальному валу, розміщеному на подовжній осі 2 (19) 1 3 Корисна модель підноситься до устаткування для очистки водойм і виконання днопоглиблювальних робіт. Відома очеретокосарка (Коршиков Л.Л. "Плавучая косилка" Ж. "Мелиорация и поднос хозяйство" № І, 1995) для очистки водойм від рослинності, що складається з плавзасобу, двигуна, гідросистеми, рушія і робочого обладнання очеретокосарки. Рушій виконаний із двох поряд розташованих і жорстко зв'язаних між собою циліндричних пустотних понтонів. На поверхні понтонів по гвинтовій лінії закріплені гребні стрічки, при цьому на одному понтоні лівого направлення, а на іншому — правого. Обидва понтони обертаються за допомогою двигуна. Обладнання очеретокосарки змонтовано в передній частині плавзасобу з можливістю піднімання і опускання ріжучого робочого органу відносно поверхні води. Недоліками устаткування с те, що зрізана рослинність залишається плавати біля очеретокосарки, що заважає її роботі. Крім того остійність очеретокосарки недостатня для виконання технологічного процесу очистки водойми, через відсутність в конструкції обладнання, що виключає диферент плавба ііі. Відома також плавуча установка (патент України па винахід № 26872, Е02F 9/06. E02F9/08 "Плаваюча установка для очищення водоймищ", Б.В. № 8 від 29.1 2.1999) для очистки водойм, яка складається із плавзасобу, що виконаний у вигляді самохідної амфібії, поворотного обладнання, на якому змонтовані стріла з ковшем і два складених аутригери, що шарнірно закріплені до бортів амфібії, при цьому п'ята аутригерів складається із двох шарнірно-зв'язаних пластин, з обмеженим кутом переміщення. Недоліками установки є складність утримання човна в необхідному положенні двома аутригерами (коли часто змінюється місце розробки і коли при кожному никлі набору ґрунту, повороті платформи і розгрузці ковша виникають інерційні навантаження па плавзасіб), а також необхідність налагодження а\ тригерів з установленням в них додаткових вставок при роботі на різних глибинах. Відомий плаваючий екскаватор (И.В.Гудимов "Плавающий экскаватор" "Мелиорация и водное хозяйство" № 7, 1989), що прийнятий за прототип, складається з понтону, який опирається на чотири рухомі опори з порожнистими поплавкамибарабанами на кінцях, поворотної платформи, на якій змонтовано обладнання одноковшового екскаватора, двигун, гідросистема. Екскаватор до місця роботи транспортується на автопричепі з демонтованими барабанами. На об'єкті виконання очисних робіт монтаж барабанів виконують додатковим вантажопідйомним краном. Запускають двигун екскаватора і гідросистемою опускають барабани на ґрунт. Спираючись на них, понтон трохи піднімають і виводять з під нього автопричіп. По похилому берегу до водойми екскаватор рухається самостійно за допомогою заглиблення ковша в ґрунт і підтягуванням до нього понтону, що стоїть на барабанах. 52426 4 Переміщення по воді виконується при черговому виносі ковша вперед, заглибленням його в дно водойми, і підтягуванням понтону до ковша. Для очистки водойми понтон попередньо гальмують барабанами, заглибивши їх в дно водойми, після цього, відповідно до відомої технології робіт одноківшового екскаватора з обладнанням зворотної лопати, виконується розробка ґрунту. Недоліками обладнання, прийнятого за прототип, є складність конструкції і керування поплавками-барабанами, що приводить до виконання багатьох операцій з використанням додаткового вантажопідйомного крану, проведення часткового демонтажу і монтажу поплавків-барабанів. Крім того технологічний процес значно ускладнюється при очистці водойм з нерівним дном, змінної глибини, при наявності течії. В останньому випадку виникає необхідність в додаткових переміщеннях як поплавків-барабанів, так і самого понтону, від чого знижується технологічність, якість і продуктивність робіт. Задачею запропонованої корисної моделі є усунення вказаних недоліків. Задача досягається за рахунок підвищення остійності плавзасобу шляхом рівномірного і синхронного збільшення відстані між понтонами відносно основної рами, оснащення понтонів обладнанням для заглиблення паль і опускання опор, встановлення їх в робоче положення, за допомогою яких в значній мірі зменшується диферент плавзасобу при циклічному характері роботи одноківшевого екскаватора, що супроводжується динамічним навантаженням, а також досягається можливість ведення очисних робіт методом папільонування, через що підвищується якість очистки водойм. Наявність індивідуального приводу понтонів і паль підвищує маневреність. На фіг. 1 показаний загальний вид зверху плаваючого екскаватора в робочому положенні; на фіг. 2 — вид з боку в робочому положенні; на фіг. 3 — вид ззаду в робочому положенні; на фіг. 4 вид зверху екскаватора при транспортуванні його на причепі (транспортне положення); на фіг. 5 — вид його ззаду; на фіг. 6 - механізм переміщення паль. Плаваючий екскаватор складається із основної рами 1, (фіг. 1), двох П-подібних рам 2, двох понтонів 3, чотирьох висувних балок з рейками 4, двох механізмів для синхронного переміщення висувних балок з рейками 4, що включають гідромотори 5 з редукторами 6, чотирьох напрямних 7 з гладкими балками 8. На основній рамі 1 встановлена поворотна платформа 9, на якій змонтовано обладнання екскаватора 10 з кабіною 11 (фіг. 2), стрілою 12, рукояткою 13, що керуються гідро циліндрами 14 і 15, грейфером 16, противагою 17. Понтони 3 це порожнисті герметичні циліндри, на поверхні яких по гвинтовій лінії закріплені гребеневі стрічки 18, при цьому на одному понтоні стрічки правої навивки, на іншому — лівої. Понтони змонтовані на підшипниках в П-подібній рамі 2 і обертаються за допомогою гідромоторів 19 з можливістю реверсування. Загальний об'єм пон 5 тонів з необхідним запасом плавучості забезпечує вантажопідйомність всього обладнання екскаватора, $ завантаженим ковшем. До кінців П-подібних рам 2 кріпляться механізми 20 для переміщення і заглиблення паль 21, які включають зубчасті рейки 22. При цьому задні палі мають конусний наконечник 23, а передні — пустотну п'яту 24, яка виконана із двох конусів, що зварені між собою по основах. На відміну від задніх паль, що призначені для заглиблення в ґрунт і заякорювання плавзасобу, передні — виконують тільки функцію опори. Палі в механізмі 20 встановлені в напрямні коробки 25 (фіг. 6), шарніром 26 з'єднані з П-подібними рамами 2. Всередині коробок 25 на валах змонтовані зубчаті колеса 27, які знаходяться в зчепленні з рейками паль. Кожне зубчате колесо 27 приводиться в рух гідромотором. До зовнішньої сторони напрямних коробок 25 закріплені шипи 28 для з'єднання з головками штоків гідроциліндрів 29. Корпус гідроциліндрів 29 шарнірно з'єднаний з Пподібними рамами 2. В запертому положенні гідроциліндри 29 виконують функцію укосин, чим забезпечується жорсткість з'єднання П-подібних рам 2 з заглибленими в ґрунт палями і зменшення діференту плавзасобу при екскавації ґрунту. Зменшення діференту досягається ще і тим, що передні палі своїми п'ятами спираються на дно водойми. На основній рамі 1 (фіг. 1) перпендикулярно до її поздовжньої осі змонтовані дві пари напрямних 30 симетрично відносно поперечної осі основної рами 1. В кожній парі напрямних 30 розміщені дві зйомні рухомі балки із зубчатими рейками 4, повернуті одна до одної зуб'ями. Балки з зубчатими рейками 4 зйомні. Одним кінцем вони жорстко закріплені, наприклад, болтовим з'єднанням до П-подібних рам 2, інші кінці вільно розміщені в напрямних 30. Між зубчатими рейками встановлено зубчате колесо 31 (фіг. 2), що знаходиться в зчепленні з ними. Вали 32 зубчатих коліс 31 розміщені вертикально на поздовжній осі основної рами 1. На верхньому кінці валів 32 змонтовано конічне зубчате колесо 33, що взаємодіє зконічним зубчатим колесом 34 редуктора 6. Гідромотори 5 працюють від одного насосу гідросистеми (на фіг. не показано), наприклад, через стандартний розділювач потоку, що забезпечує синхронну частоту обертання валів гідромоторів 5. З метою виключення виходу рейок із напрямних балок 30 на кінцях напрямних балок встановлені стандартні електричні кінцеві вимикачі 35 (фіг. 3), що з'єднані електроприводом із однією секцією електричного гідророзподілювача гідросистеми плаваючого екскаватора, а на зубчатих рейках 4 вмонтовані поворотні важилі 36, котрі в кінцевому положенні зубчатих рейок взаємодіють зі стержнем стандартного кінцевого вимикача 35. З метою збільшення надійності конструкції в робочому положенні і плавного переміщення понтонів іч транспортного положення в робоче і зворотньо на кіпцях основної рами 1 паралельно напрямним 30, розміщені напрямні 7 і гладкими балками 8 в середині. Одні кінці гладких балок жорстко чакріплені до П-подібних рам, інші вільні. Всі балки рівні по довжині. 52426 6 Гладкі балки власного приводу не мають і переміщуються в напрямних під дією 11-подібних рам, що зв'язані з балками із зубчатими рейками. Плаваючий екскаватор працює наступним чином. До місця роботи плаваючий екскаватор доставляється на автопричепі в транспортному положенні (фіг. 4) і демонтованою рукояттю. З автопричепа екскаватор може з'їхати самостійно. Для цього біля кінця автопричепу встановлюють сходні або роблять іиільіі) насипку з похилом 1015°. Після чого заводять двигун екскаватора і вмикають гідромотори потопів 3 па передній хід. Під дією понтонів, що обертаються, забезпечених гребними стрічками 18 плаваючий екскаватор з’їжджає з автопричепу і під'їжджає до місця переналадки його із транспортного в робоче положення. Для цього одночасно вмикають гідромотори понтонів і гідромотори 5 (фіг. 1 )приводу балок з зубчатими рейками 4. Під дією руху балок з зубчатими рейками 4 понтони, що обертаються, рухаючись переходять в робоче положення. При висуванні балок 4 (фіг. 3) з зубчатими рейками па максимально допустиму довжину, поворотні важелі 36 діють на стержні кінцевих вимикачів 35, внаслідок чого спрацьовує електричний гідророзподілювач екскаватора і вимикаються гідромотори 5 (фіг. 1) приводу зубчатич колес 31. що знаходяться в зчепленні з зубчатими рейками балок 4. Відповідно, в робочому положенні кожен понтон 3 від основної рами 1 знаходиться па відстані максимального виходу балки з зубчатими рейками із напрямних, через \\ю і забезпечується покращення остійності плаваючого екскаватора. Зупинивши екскаватор, монтують рукоять 13 (фіг. 2) з грейфером 16 і розвертають платформу 9 на 180°, підготувавши таким чином до спуску його на воду. Спуск екскаватора виконують по похилому березі. Вмикають гідромотори І1) потопів З і па малій швидкості екскаватор спускають па воду. На воді гідромотори 19 вимикають і гідроциліндрами 29 повертають коробки 25 відносно шарнірів 26. Виводять задні палі із транспортного положення в вертикальне положення Потім гідромоторами, взаємодіючи па зубчаті колеса 27 (фіг. 6). заглиблюють палі в дно водойми. Платформу 9 встановлюють в початкове робоче положення, розвернувши її на 180°. Далі задні палі вигубляють, вмикають гідромотори 19 понтонів 3 і, регулюючи гідророзподільниками гідросистеми, підходять до місця проведення очисних робіт. Діставшись до позначеного місця, понтони виключають. Гідромоторами зубчатих коліс 27, заглиблюють залпі палі в ґрунт, а передні опускають на дію водойми до їх упору. Очистку водойми виконують відповідно до відомої технології робіт одноковшового екскаватора, що обладнаний грейфером. З метою якісної очистки, платформу 9 розвертають після кожного набору ґрунту на кут, що виключає пропуск розробки або на ширину захвату ковша. Виконавши очистку водойми при одному вильоті стріли, виліг міняють. В тій же послідовності викопують очистку всієї захватки з однієї стоянки екскаватора. Для очистки наступної захватки передні палі обертанням зубчатих коліс 27 трохи піднімають і вигубляють одну задню палю. Одним приводом гідромо 7 тора 19 повертають плавзасіб на кут. що дозволяє виконання очистки без пропусків, після чого трохи підняту палю знову заглиблюють, вимкнувши попередньо привід гідромотору 19. Для розміщення плавзасобу в положення паралельне попередньому і, виключаючи пропуск очистки дна, раніше заглиблену палю виглубляють і виключають привід гідромотору 19 другого понтону і через це повертають плавзасіб відносно заглибленої палі до розміщення його паралельно попередні,ому. Закінчивши розворот, понтон, що обертається, вимикають, заглиблюють іншу палю і опускають передні палі на дно до упору, забезпечуючи тим 52426 8 самим надійність заякоріння плавзасобу в повій позиції, покращуючи умови для продовження очисних робіт. Вигрузку ковша виконують або на берег, або в самохідну баржу. Таким чином, використання запропонованого устаткування, підвищить остійність плаваючої о екскаватора за рахунок збільшення відстані між понтонами, забезпечить перехід із холостого в робоче положення і маневрування при переході від однієї захватки до іншої, а також підвищить якість очистки - водойми і збільшить продуктивність праці. 9 52426 10 11 Комп’ютерна верстка Д. Шеверун 52426 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП ―Український інститут промислової власності‖, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFloating excavator
Автори англійськоюVoitovych Ivan Vasyliovych, Zaitsev Leonid Pavlovych, Boiko Volodymyr Mykhailovych, Martyniuk Hryhorii Fedosiiovych, Kovtunovych Ivan Vasyliovych, Savochenko Volodymyr Vasyliovych, Boiko Hryhorii Yaroslavovych
Назва патенту російськоюПлавающий экскаватор
Автори російськоюВойтович Иван Васильевич, Зайцев Леонид Павлович, Бойко Владимир Михайлович, Мартинюк Григорий Феодосиевич, Ковтунович Иван Васильевич, Савоченко Владимир Васильевич, Бойко Григорий Ярославович
МПК / Мітки
МПК: E02F 5/00
Мітки: плаваючий, екскаватор
Код посилання
<a href="https://ua.patents.su/6-52426-plavayuchijj-ekskavator.html" target="_blank" rel="follow" title="База патентів України">Плаваючий екскаватор</a>
Одноківшовий двогусеничний екскаватор

Номер патенту: 57216
Опубліковано: 16.06.2003
Автори: Бугайов Сергій Семенович, Бугайов Семен Петрович
МПК: E02F 3/28
Мітки: одноківшовий, двогусеничний, екскаватор
Формула / Реферат:
1. Одноківшовий двогусеничний екскаватор /двоходовий/ «пряма лопата», що містить нижню та гусеничні рами, опорно-поворотний пристрій, платформу з механізмами, надбудову, стрілу, сідлові підшипники напірного механізму на стрілі, рукоять, щелепний ківш, який відрізняється тим, що всередині П-подібної нижньої рами між гусеничними ходами розташований пластинчатий конвеєр з прийомним лотком під сідловими підшипниками напірного механізму.2....
Роторний екскаватор поперечного копання з телескопічною стрілою
Номер патенту: 88392
Опубліковано: 12.10.2009
Автор: Гаврюков Олександр Володимирович
МПК: E21C 47/00, E02F 5/16, E02F 9/14, E21C 49/00, E02F 3/18
Мітки: копання, екскаватор, роторний, поперечного, телескопічною, стрілою
Формула / Реферат:
Роторний екскаватор поперечного копання з телескопічною стрілою, що містить ходовий пристрій, опорні рами, пілони, розвантажувальний конвеєр, який відрізняється тим, що на поворотній платформі з можливістю зміни радіуса дії екскаватора під час його роботи встановлена телескопічна стріла робочого органу, а на телескопічній стрілі робочого органу встановлений телескопічний пристрій з системою автоматичного натягнення стрічки, який може...
Екскаватор зі зміщеною віссю копання

Номер патенту: 48804
Опубліковано: 12.04.2010
Автори: Сукач Михайло Кузьмич, Ягодинець Володимир Анатолійович
МПК: E02F 3/28
Мітки: віссю, копання, екскаватор, зміщеною
Формула / Реферат:
Екскаватор зі зміщеною віссю копання, що являє собою базову машину з поворотною платформою і робочим органом у вигляді ковша, рукояті, стріли та має шестигранну систему важелів з гідроциліндрами керування механізмом повороту, який відрізняється тим, що стрілу виконано із двох шарнірно з'єднаних між собою секцій, першу з яких змонтовано на платформі екскаватора з можливістю підйому у вертикальній площині, а другу шарнірно прикріплено до...
Траншейний екскаватор для розкривання підземних трубопроводів
Номер патенту: 42389
Опубліковано: 10.07.2009
Автори: Лисак Сергій Іванович, Сукач Михайло Кузьмич
МПК: E02F 3/00
Мітки: підземних, трубопроводів, екскаватор, траншейний, розкривання
Формула / Реферат:
Траншейний екскаватор для розкривання підземних трубопроводів, який включає в себе базову машину та робоче обладнання, що складається з підйомно-опускної рами, на якій жорстко закріплено дві ланцюгові багатоківшеві секції для розробки ґрунту по обидва боки від трубопроводу та слідкуючий засіб для контролю за його положенням, який відрізняється тим, що рами багатоківшевих секцій встановлено вертикально до дна забою та повздовжньої осі...
Екскаватор з гнучкою підвіскою ковша
Номер патенту: 82340
Опубліковано: 10.04.2008
Автори: Слепян Віктор Йосипович, Логінов Ігор Георгійович
МПК: E02F 3/46
Мітки: екскаватор, гнучкою, підвіскою, ковша
Формула / Реферат:
Екскаватор з гнучкою підвіскою ковша, що містить стрілу, підйомний, тяговий і розвантажувальний канати, що закріплені одними кінцями за допомогою збруї на ковші, а іншими кінцями - на власних барабанах, при цьому розвантажувальний канат закріплений до задньої стінки ковша, а тяговий - в його передній частині, який відрізняється тим, що кріплення підйомного каната до ковша розміщено між кріпленням тягового каната і центром ваги порожнього...
Попередній патент: Спосіб виявлення осіб груп ризику по розвитку остеопорозу
Наступний патент: Спосіб контролю обводнення світлих нафтопродуктів
Випадковий патент: Муфта еластична