Спосіб адаптивного наведення антен ртс наземного автоматизованого комплексу управління космічними апаратами
Номер патенту: 52900
Опубліковано: 10.09.2010
Автори: Пашков Дмитро Павлович, Ломоносов Сергій Євгенійович, Домнін Сергій Володимирович, Рачинський Олександр Петрович
Формула / Реферат
Спосіб адаптивного наведення антен РТС наземного автоматизованого комплексу управління космічними апаратами, який полягає в використанні механізму адаптації по частоті при переході від режиму "виявлення" і "захоплення" до режиму "супроводження" КА по рівню вхідного сигналу, який відрізняється тим, що використовують двохетапну схему наведення з переключенням приймачів слідкуючої системи антени з широкої смуги супроводження на вузьку в різних режимах управління антеною.
Текст
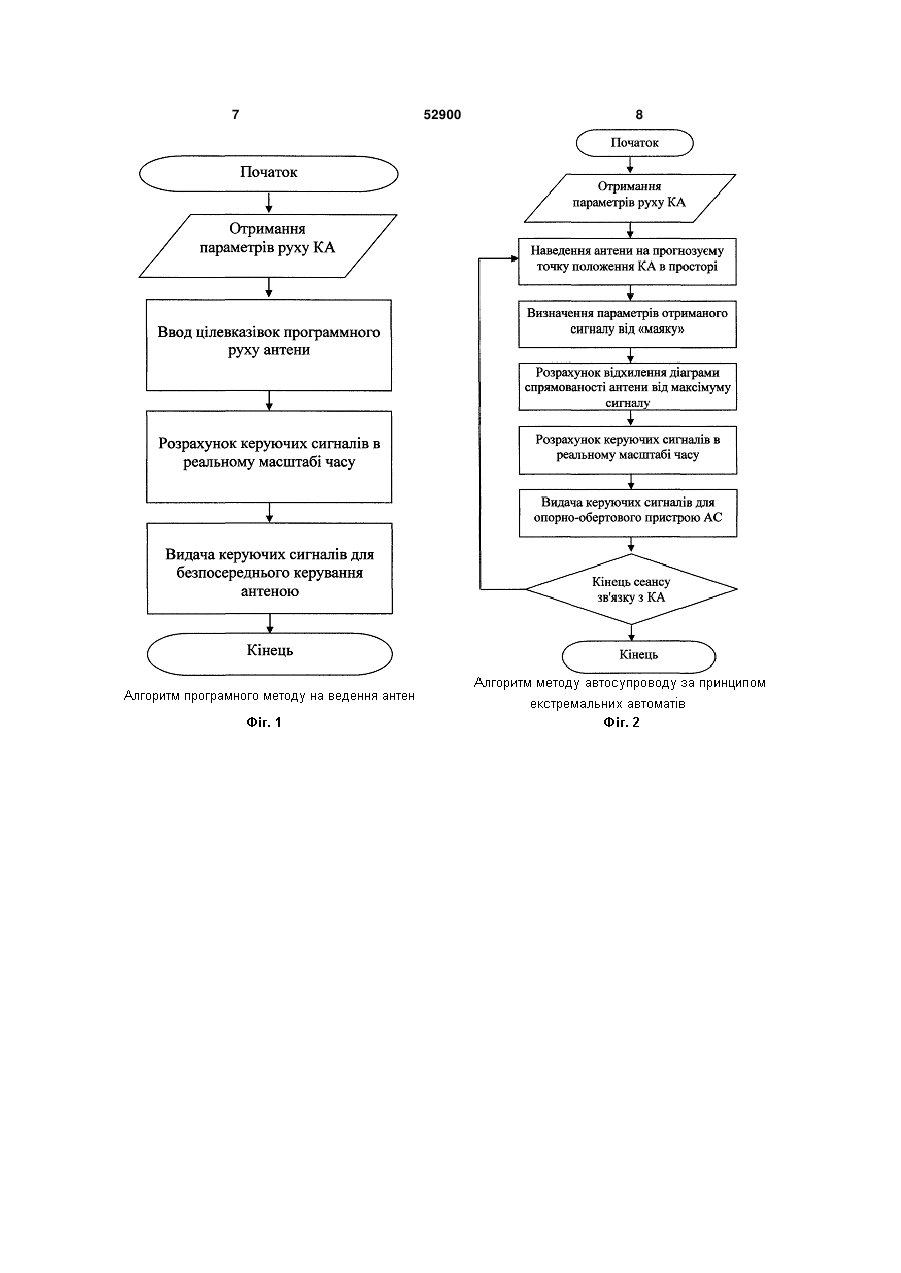
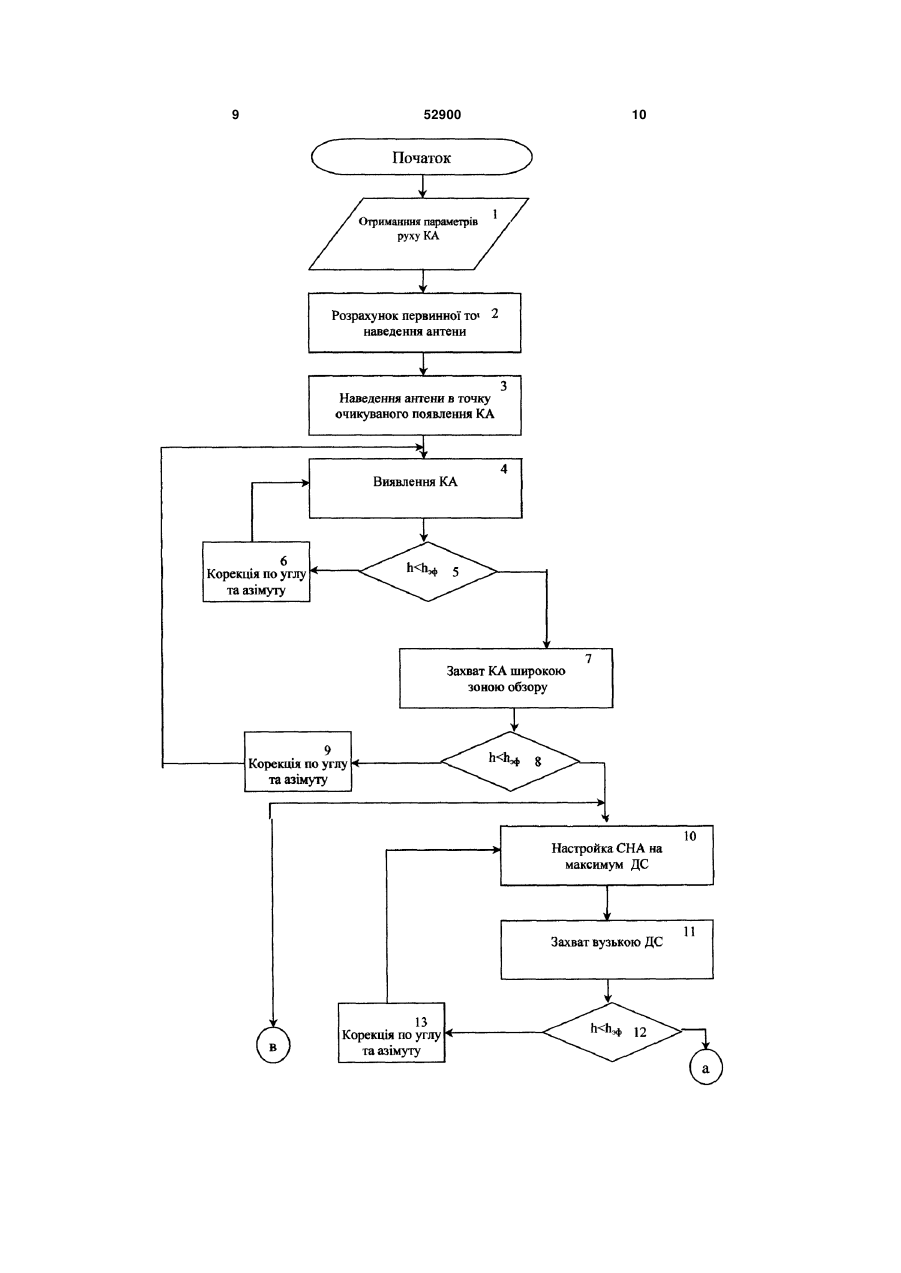
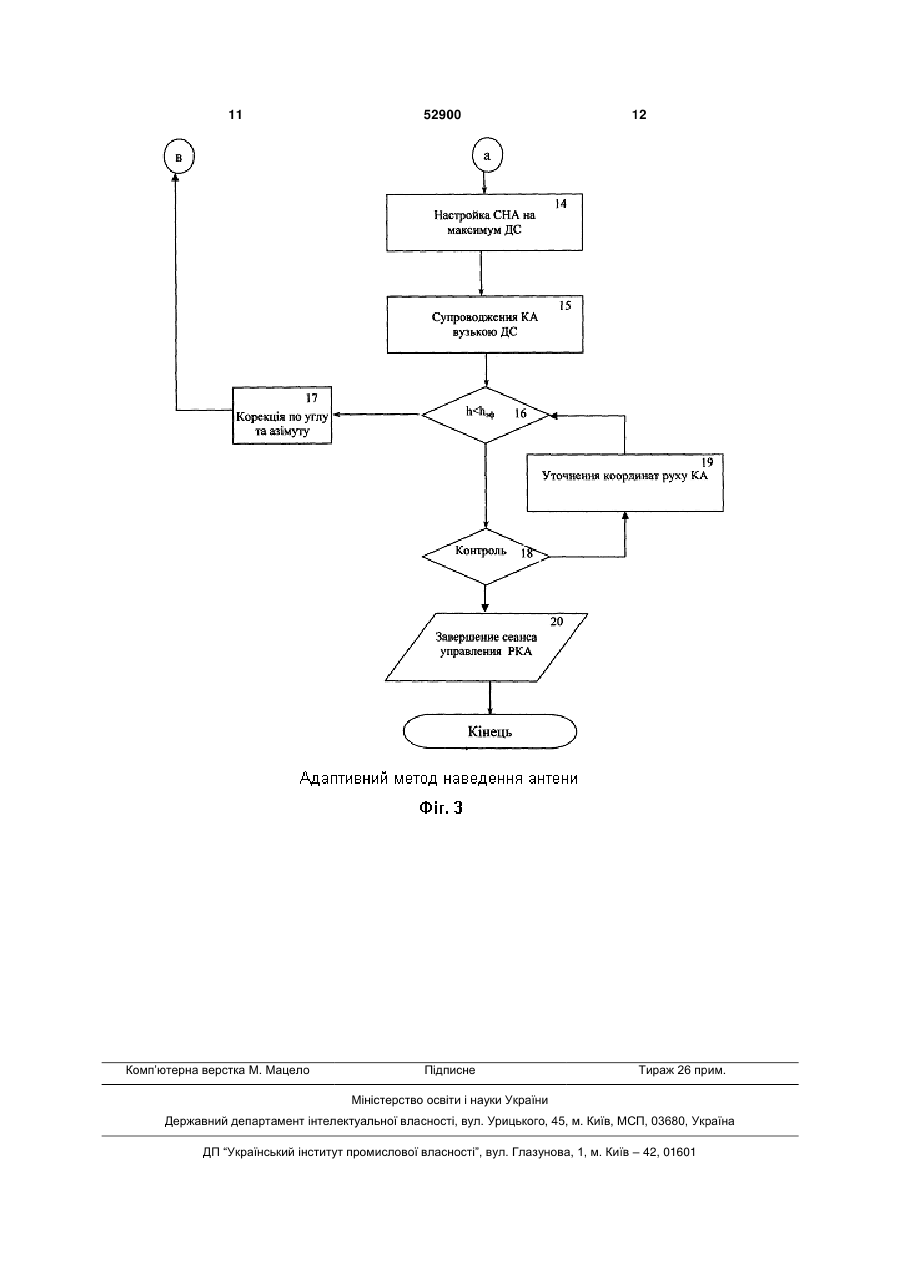
Спосіб адаптивного наведення антен РТС наземного автоматизованого комплексу управлін 3 52900 4 кою смугою пропускання в умовах підвищеної заАналогічним чином за допомогою пристрою вадової обстановки. корекції програми можуть компенсуватися погрішСуть запропонованого способу полягає в наності наведення, обумовлені радіорефракцією в ступному. атмосфері, гравітаційними деформаціями ОПУ, Існуючі на сучасному етапі задачі збільшення дзеркальної системи, гідрометеорологічними чиноб'ємів і швидкості інформаційного обміну в косміниками, носячі систематичний або періодичний чних системах приводять до необхідності викорисхарактер. товування більш високих діапазонів частот радіохСистеми автосупроводу, виконані як екстревиль [5], що дозволяє при цьому забезпечити мальні автомати Фіг. 2 [1, 4] дозволяють спростити вимоги по скритності інформаційного обміну в розопромінюючу систему антен (в порівнянні з опровідувальних системах [2]. Проте із збільшенням мінюючою системою антени у разі застосування робочої частоти ширина діаграми спрямованості систем автосупроводу) на основі методу конічного (ДН) антени звужується і виникає необхідність засканування і моноімпульсного методу. Низька безпечення підвищеної якості функціонування швидкодія систем автосупроводу, виконаних на пристроїв наведення антен РТС [3]. При цьому, основі екстремальних автоматів, визначається допустима помилка наведення антен РТС не попринципом послідовного пошуку максимуму сигнавинна перевищувати величини (для антени з палу, що приймається, по кожній осі (на відміну від раболічним рефлектором) десятих часток ширини паралельного при традиційних методах автосупДС по рівню половинної потужності [3]. Окрім цьороводу), закладеним в цю систему, і інерційністю го, на якість функціонування РТС істотний вплив важких антенних систем земних станцій, що принадають нелінійні інерційні процеси, що виникають водить до достатньо великого часу відпрацювання в антенних пристроях, які також приводять до зниелектричним приводом системи одиничного кроку. ження точності наведення антен радіотехнічних Інерційність, у свою чергу, пояснюється вузькопосистем. лосністю системи авторегулювання стежачого Принцип дії існуючих систем пеленгації засноприводу і, як наслідок, великим часом перехідного ван на порівнянні фактичного напряму променя з процесу [4]. Застосування ж широкосмугових сиснапрямом приходу сигналу з КА. За наявності потем приводу приводить до труднощів практичної милки наведення в системі виробляються різницереалізації таких систем, оскільки це означало б ві сигнали. Напруги і фази цих сигналів відповідапідвищення частоти зрізу системи, що значно ють проекціям величини кутової погрішності на ускладнює забезпечення умов стійкості при збенапрями осей опорно-поворотного пристрою реженні високого коефіцієнта посилення в системі, (ОПП), щодо яких здійснюються повороти антени необхідного для збереження допустимої величини [6, 7]. Вказані сигнали подаються на виконавчі помилки стеження [6]. пристрої, які виробляють команди, запускаючі елеНайбільш ефективна пеленгація, що базується ктроприводи ОПП антени у відповідному напрямі. на використовуванні діаграми спрямованості антеУ міру обертання антени різниця у напрямі промени, що наводиться. В цьому випадку виключаютьня і напрямі приходу сигналу з КА зменшується. ся помилки, пов'язані з неточностями у визначенні При цьому зменшуються і сигнали помилки. При фактичного напряму променя антени [2, 3]. Основдеякому значенні погрішності в наведенні променя ними джерелами вказаних помилок є деформація різницеві сигнали помилки по осях стають менше конструкцій антени під впливом: гравітаційних сил заданої величини, і виконавчі пристрої виробляпри різних кутах місця; вітрового натиску при посють команди зупинки електроприводів ОПУ. При тійній швидкості вітру або при поривах вітру; неодповторній появі помилки наведення весь цикл понорідного розігрівання сонячним випромінюванвторюється. Найпоширенішими на сучасному етапі ням; змін навантаження при обмерзанні; використовують методи програмного наведення, інерційних сил при прискореннях [6]. Крім того, при метод автосупроводу за принципом екстремальпеленгації за допомогою власної діаграми спрямоних автоматів, методи екстремального регулюванваності виключаються помилки, що викликаються ня [3]. виробничими і монтажними допусками, а також Оскільки режим програмного наведення поляпомилки, що виникають при видачі і відпрацювангає в здійсненні переміщення ДН антени за проня команд сервоприводами [6, 7]. грамою відповідно до траєкторії руху КО, то при Крім перерахованих, в порівнянні з режимом цьому управляючі сигнали обчислюються і форпрограмного наведення, тут виключається ще одмуються в реальному масштабі часу в програмнона помилка: напрям на КО визначається по сигнаму пристрої на підставі апріорних даних про рух лу бортового маяка або зв'язному сигналу, тому КО (див. Фіг. 1). Поточні координати наведення виключається помилка в прогнозуванні координат. антени, розраховані пристроєм програмного навеЯкість уточнення параметрів орбітального рудення, дають прогнозований напрям на КО. ху об'єкту багато в чому залежить від точності інФактичний напрям на КА відрізняється від проформації вимірювальних засобів. Для РТС НАКУ гнозованого цілим поряд чинників, унаслідок чого КА помилка наведення по азимуту і куту місця випрогнозовані координати є неточними. Після викозначатися виразом [5] нання траєкторних вимірювань і уточнення коор0,5 , динат КА в програму за допомогою пристрою ко(1) ДВh рекції програми вводяться поправки у вигляді Km приростів координат, швидкості або зсуву на деДс який часовий інтервал [7]. де - помилка наведення антенної системи; 5 52900 6 КА вузькою ДС. У разі зриву стеження на (15) кро0,5 - ШДН по рівню половинної потужності; ці, (12) крок здійснює перехід на (10) крок алгоритДв - динамічний діапазон приймача; му і, відповідно алгоритм повторюється. На (16) Дс - динамічний діапазон стежачої системи; кроці алгоритму проводиться контроль роботи Кm - коефіцієнт, що характеризує крутизну сигсистеми наведення і уточнення координат КА (17) налу помилки, залежний від типу системи вияв[8]. лення (для моноімпульсної системи [6] Кm =1,57). Зважаючи на досить високі вимоги до точності Зважаючи на вузькість променя параболічних вирішення балістико-навігаційного забезпечення, антен НАКУ КА, помилка наведення антени не визначення параметрів орбіти і управління рухом повинна перевершувати десятих доль ширини ДС антени вимагає додаткового об'єму устаткування по рівню половинної потужності і визначається на наземній станції, яка складається з систем грувиразом [6]: бого наведення (що використовує широку ДС), доп (0,1 0,25) 0,5 , (2) точного наведення (вузька ДС) і автоматичного супроводу. Якість функціонування вказаних сисде 0.5 - ШДС по рівню половинної потужностем крім того істотно залежить як від наявності ті, дорівнює бортових маяків, так і від деформацій параболіч3 4,2 10 ної антени. , 0,5 Запропонований підхід до рішення поставлеD 3 ної задачі дозволяє забезпечити супровід КА в 4,2 10 - коефіцієнт для параболічної антени умовах впливу випадкових помилок в програмі [6]; управління АС, деформаціях антени, вітрових на- робоча довжина хвилі; вантаженнях, сонячного нагріву та ін. [6, 9]. D - діаметр дзеркала; Алгоритм роботи за допомогою описаних сис' - розмірність ширини ДС в кутових хвилинах; тем дозволяє здійснити контроль параметрів руху h - відношення сигнал-шум по потужності. КА на перших же витках польоту, що дозволяє За даних умов функціонування РТС НАКУ, визначно підвищити якість уточнення початкових рішення завдань визначення параметрів орбіт КА умов орбіт КА, які повільно змінюються. пропонується здійснювати з використанням відоДжерела інформації: мого [7] адаптивного методу наведення антен 1. Белянский П.В., Сергеев Б.Г. Управление РТС. наземными антеннами и радиотелескопами, - М: На (1) кроці розраховуються цілевказівки (ЦВ) Сов.радио, 1980.- 280с. по початковим умовам каталогів пріоритетних КА. 2. Крэсснер Г.Н., Михаэлс Дж.В. Введение в Наступним кроком (2) здійснюється прогнозування системы космической связи / Пер. с англ. под ред. положення об'єкту і розрахунок програми навеМ.Г. Крошкина и В.В. Маркова.- М.: Связь, 1967.дення антени (3) в точку небесної сфери очікува392с. ної появи КА. Четвертим кроком для захоплення 3. Дитц Р.Х. Система связи и слежения космиКА пропонується використовувати широку ДС, де ческой станции // ТИИЭР. - 1987. - Т.75. №3. при входженні апарату в зону дії АС відбувається C.118-132. його виявлення, і система наведення антени 4. Покрас A.M., Цирлин В. М., Кудеяров Г.Н. (СНА) на (5) кроці проводить порівняння рівня сигСистемы наведения антенн земных станций спутналу h, що приймається, з пороговим hеф. При виниковой связи. - М.: Связь, 1978. - 152с. конанні даної умови СНА на (7) кроці здійснює за5. Корсунский Л.Н. Распределение радиоволн хоплення супутника. Якщо рівень сигналу, нижче при связи с искусственными спутниками Земли. за порогове значення, (6) крок перекладає систему М.: Сов. радио, 1971, - 208 с. на виконання (4) кроку. На (8) кроці порівнюються 6. Кравец В.Г., Любинский В.Е. Основы управсигнал що приймається і порогові сигнали з подаления космическими полетами. - М.: Машинострольшим підстроюванням системи наведення антени ение, 1983. - 224 с. в максимуму діаграми спрямованості на КА. У разі, 7. Радиотехнические системы передачи инколи рівень сигналу нижче порогового, (6) крок формации / В.А. Борисов, В.В. Калмыков, Я.М. перекладає систему на виконання (4) кроку. ДосяКовальчук та ін./ Под ред. В.В. Калмыкова. - М.: гши виконання умови енергетичних співвідношень Радио и связь, 1990. - 304 с. на (10) кроці відбувається перехід з широкої ДС на 8. Ломоносов С.Е. Подход к повышению точвузьку, і СНА здійснює захоплення вузькою ДС. ности наведения антенных систем радиотехничесНаступним кроком (11) здійснюється перевірка ких средств контроля космического пространства // рівня сигналу, що приймається, і, у разі негативноСистеми управління, навігації та зв'язку - Київ: ДП го рішення, (12) крок алгоритму перекладає систе«Центральний науково-дослідний інститут навігації му на виконання (9) кроку. Якщо рівень сигналу та управління. - 2009: - Вип. 1(9) - С.27-29. вище порогового, (13) кроком система наведення 9. Чердынцев В. А. Радиотехнические систеантеною виводить максимум головної пелюстки мы. - Минск.: Вышэйшая школа, 1988. - 369 с. ДС, після чого (14) кроком проводиться супровід 7 52900 8 9 52900 10 11 Комп’ютерна верстка М. Мацело 52900 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adaptive pointing of radio system antennas of ground automatic control of spacecraft
Автори англійськоюDomnin Serhii Volodymyrovych, Rachynskyi Oleksandr Petrovych, Pashkov Dmytro Pavlovych, Lomonosov Serhii Yevheniiovych
Назва патенту російськоюСпособ адаптивного наведения антенн ртс наземного автоматизированного комплекса управления космическими аппаратами
Автори російськоюДомнин Сергей Владимирович, Рачинский Александр Петрович, Пашков Дмитрий Павлович, Ломоносов Сергей Евгеньевич
МПК / Мітки
МПК: B64G 3/00
Мітки: апаратами, управління, ртс, космічними, адаптивного, спосіб, наведення, автоматизованого, комплексу, антен, наземного
Код посилання
<a href="https://ua.patents.su/6-52900-sposib-adaptivnogo-navedennya-anten-rts-nazemnogo-avtomatizovanogo-kompleksu-upravlinnya-kosmichnimi-aparatami.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивного наведення антен ртс наземного автоматизованого комплексу управління космічними апаратами</a>
Спосіб перетворення форми діаграми спрямованості дзеркальних антен радіотехнічних засобів наземного автоматизованого комплексу управління космічними апаратами
Номер патенту: 52229
Опубліковано: 25.08.2010
Автори: Поляков Олександр Леонідович, Пашков Дмитро Павлович, Залужний Руслан Миколайович, Ломоносов Сергій Євгенійович
МПК: H04B 7/00
Мітки: засобів, апаратами, управління, комплексу, антен, дзеркальних, форми, діаграми, спрямованості, спосіб, автоматизованого, наземного, радіотехнічних, перетворення, космічними
Формула / Реферат:
Спосіб перетворення форми діаграми спрямованості дзеркальних антен радіотехнічних засобів наземного автоматизованого комплексу управління космічними апаратами, який полягає в розрахунку розмірів концентричних фрагментів та параметрів їх монтажу в відповідності з умовами проведення сеансів зв'язку та за виразами, що враховують характер дзеркальної системи та випромінювача і приводять до звуження діаграми спрямованості антени у відповідній...
Спосіб відхилення головного максимуму діаграми спрямованості рупорних випромінювачів антенних систем наземного автоматизованого комплексу управління космічними апаратами
Номер патенту: 44896
Опубліковано: 26.10.2009
Автори: Пашков Дмитро Павлович, Залужний Руслан Миколайович, Рачинський Костянтин Олександрович, Ломоносов Сергій Євгенійович
МПК: H04B 7/00
Мітки: апаратами, систем, головного, автоматизованого, спосіб, комплексу, антенних, відхілення, рупорних, випромінювачів, спрямованості, наземного, діаграми, космічними, максимуму, управління
Формула / Реферат:
Спосіб відхилення головного максимуму діаграми спрямованості рупорних випромінювачів антенних систем наземного автоматизованого комплексу управління космічними апаратами, який полягає в застосуванні додаткового антенного пристрою - концентричних фрагментів зон Френеля, який в сукупності з антеною формує поле (відповідний амплітудний та фазовий розподіл) в розхилі рупора таким чином, що головний максимум діаграми спрямованості в дальній зоні...
Координатно-часовий спосіб керування космічними апаратами
Номер патенту: 19490
Опубліковано: 15.12.2006
Автори: Моргун Олександр Андрійович, Загорулько Олександр Миколайович, Богом'я Володимир Іванович
МПК: B64G 1/24
Мітки: космічними, спосіб, апаратами, координатно-часовий, керування
Формула / Реферат:
Координатно-часовий спосіб керування космічними апаратами, який полягає в тому, що програма роботи бортових систем КА (космічного апарата), яка записується в бортовий запам'ятовуючий пристрій для подальшого відпрацювання, являє собою параметричну (змістовну) частину та часову і просторову (координатну) складові, які забезпечують виконання операцій керування як в заданий час, так і в заданій точці простору, яка відрізняється тим, що поряд з...
Спосіб керування космічними апаратами.
Номер патенту: 32203
Опубліковано: 12.05.2008
Автори: Загорулько Олександр Миколайович, Богом'я Володимир Іванович, Ожінський Віктор Васильович
МПК: G05B 17/00
Мітки: апаратами, керування, спосіб, космічними
Формула / Реферат:
Спосіб керування космічними апаратами (КА), який полягає в тому, що в процесі експлуатації КА процесор з використанням математичного апарату нечіткої логіки накопичує досвід про типові відмови, відмови, викликані випрацюванням ресурсу апаратури, "плаваючі" несправності, коригує алгоритми функціонування БЦОМ, перешкоджаючи переходу в аварійні режими та режими обмеженого функціонування, забезпечуючи зберігання корисної інформації,...
Спосіб виходу на зв’язок з космічними апаратами із невідомими параметрами орбіти
Номер патенту: 51695
Опубліковано: 26.07.2010
Автори: Парфенюк Василь Григорович, Ожінський Віктор Васильович
МПК: G05B 17/00
Мітки: параметрами, спосіб, космічними, зв'язок, невідомими, орбіти, апаратами, виходу
Формула / Реферат:
Спосіб виходу на зв'язок з космічними апаратами із невідомими параметрами, який полягає в тому, що перед проведенням сеансу зв'язку з наземною станцією керування дані з навігаційного приймача обробляються бортовою цифровою обчислювальною машиною, кодуються у пакет спецінформації з маркером навігаційних вимірів та передаються до бортового спеціального комплексу, який ненаправленою антеною передає дані на наземні станції прийому наукової...
Попередній патент: Протибуксувальний пристрій автомобіля
Наступний патент: Спосіб діагностики тривалості алкогольно-наркотичних інтоксикацій
Випадковий патент: Дзеркальна насадка для діагностики кутів установки коліс автомобіля