Спосіб і пристрій для розвантаження матеріалу
Формула / Реферат
1. Спосіб розвантаження матеріалу, зокрема соломи, причому циліндр з робочою рідиною рухається зворотно-поступально для виконання поворотного руху розвантажувальної повітродувки, що щонайменше один ходовий клапан регулюється електричним струмом, який відрізняється тим, що щонайменше один ходовий клапан регулюється електричним струмом таким чином, що поршень циліндра з робочою рідиною в режимі повороту в зоні повернення поршня навантажується поступово зростаючим, вихідним від приводу тиском, і що робочий тиск кореспондуючого ходового клапана падає до досягнення моменту переключення (tвключ.) клапанів.
2. Спосіб за п. 1, який відрізняється тим, що переключення ходового клапана відбувається в момент зворотного переключення клапана (tвключ.) перед досягненням моменту зворотного ходу (tповорот.) поршня.
3. Спосіб за п. 1 або 2, який відрізняється тим, що перед переключенням ходового клапана в момент зворотного переключення клапана (tвключ.) клапан регулювання тиску вже відключається в тимчасовому інтервалі (tвідкл.), в результаті чого циліндр з робочою рідиною не навантажується робочим тиском.
4. Спосіб за одним з пунктів 1-3, який відрізняється тим, що поршень після переключення ходових клапанів навантажується в середньому лінійно зростаючим робочим тиском.
5. Спосіб за одним з пунктів 1-4, який відрізняється тим, що клапан регулювання тиску після переключення ходових клапанів для досягнення лінійного підйому тиску регулюється за допомогою електронної системи управління дальніми імпульсами.
6. Пристрій для розвантаження матеріалу, зокрема соломи, з поворотним блоком, який містить розвантажувальну повітродувку та сполучений з розвантажувальною повітродувкою з можливістю взаємодії циліндра з робочою рідиною, з блоком управління, який має щонайменше один клапан для регулювання циліндра з робочою рідиною, так що щонайменше розвантажувальна труба розвантажувальної повітродувки встановлена з можливістю повороту туди і назад, який відрізняється тим, що блок управління має клапан регулювання тиску та що передбачена електрична система управління, яка навантажує клапан регулювання тиску і/або ходовий клапан таким чином, що поршень циліндра з робочою рідиною виконує по суті гармонійний зворотно-поступальний рух.
7. Пристрій за п. 6, який відрізняється тим, що блок управління має гідравлічну систему регулювання, з гідравлічним циліндром, виконаним у вигляді циліндра з робочою рідиною, з джерелом тиску для надання робочій рідині, з нагромаджуючим робочу рідину резервуаром, причому клапан регулювання тиску через трубопровід для робочої рідини сполучений з одного боку з джерелом тиску, а з іншого боку з резервуаром для регулювання заданого робочого тиску.
8. Пристрій за п. 6 або 7, який відрізняється тим, що циліндр з робочою рідиною виконаний у вигляді циліндра з робочою рідиною подвійної дії з розташованим в зоні торцевої сторони сполученням для робочої рідини.
9. Пристрій за одним з пунктів 6 - 8, який відрізняється тим, що гідравлічна система регулювання має два 3/2-ходових клапани, які в режимі повороту навперемінно включають подачу та відтік до і від циліндра з робочою рідиною.
10. Пристрій за одним з пунктів 6-9, який відрізняється тим, що блок управління має електричну систему управління, яка з боку входу сполучена з датчиком фактичного значення кута повороту, датчиком заданого значення кута повороту та датчиком заданого значення корекції бокового вітру, і що електрична система управління в режимі повороту безперервно визначає на основі порівняння індикованого за допомогою датчика фактичного значення кута повороту дійсної точки повернення поршня із заданою точкою повернення моментів переключення (tвключ.) ходових клапанів і/або моментів відключення (tвідкл.) клапана регулювання тиску.
11. Пристрій за п. 10, який відрізняється тим, що електрична система управління має засоби для розрахунку заданої точки повернення на основі даних номінального значення датчика кута повороту та номінального значення датчика корекції бокового вітру.
12. Пристрій за одним з пунктів 6 - 11, який відрізняється тим, що електрична система управління генерує періодичний сигнал управління (d) для управління клапаном регулювання тиску, який на ділянці повернення поршня відрізняється лінійним піднесенням.
13. Пристрій за п. 10, який відрізняється тим, що електрична система управління має засоби для створення управляючого сигналу (d, w15, w15’), у вигляді цифрового сигналу, зокрема у вигляді управляючого дальніми імпульсами цифрового сигналу.
14. Пристрій за одним з пунктів 6 -11, який відрізняється тим, що передбачено засоби для юстування таким чином, що в режимі юстування максимальні точки повернення (SMAX, SMIN) поршня йдуть одна за одною та індикуються, і що слідом за цим на основі індикованих значень повернення розраховується механічна середня позиція (SM) поршня.
Текст
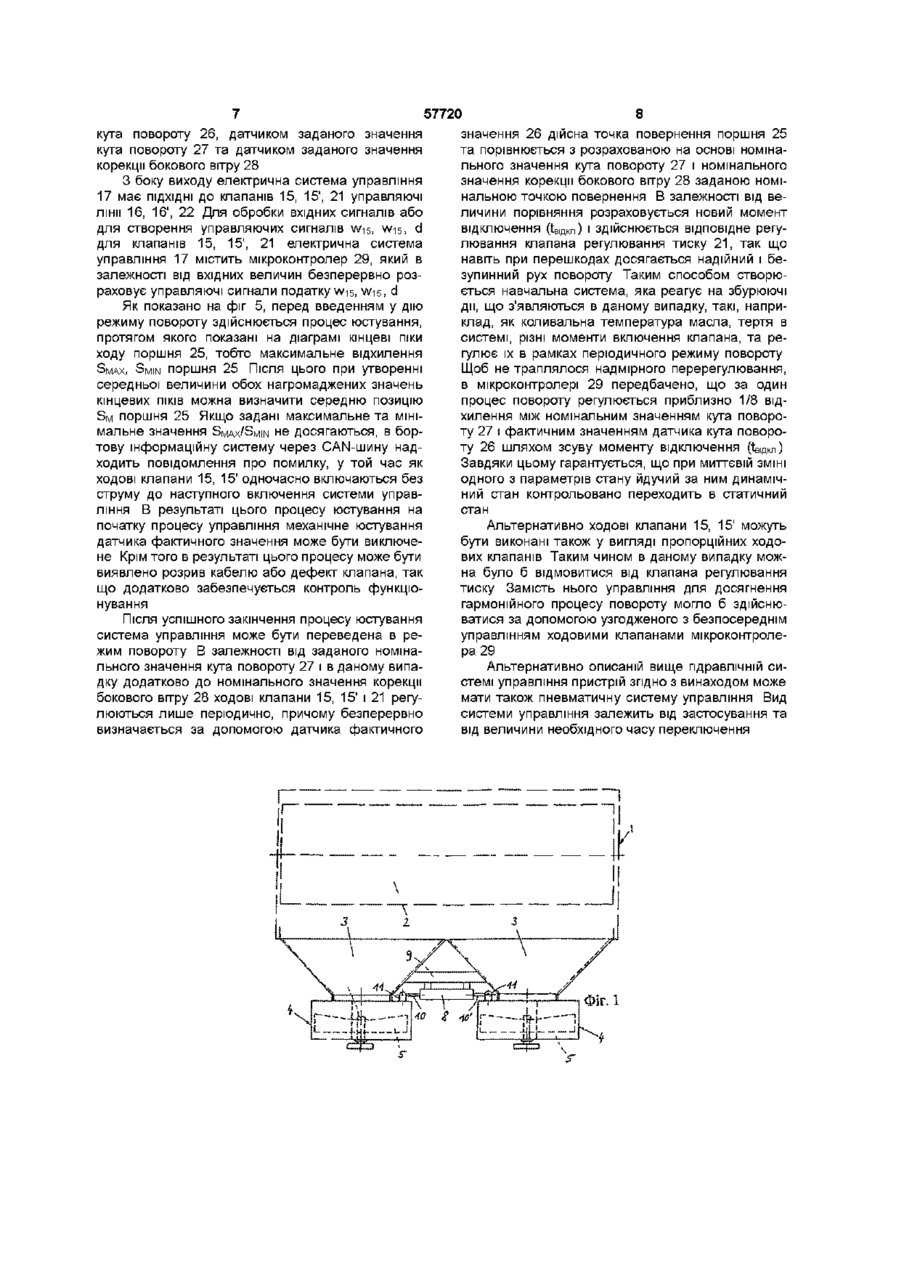
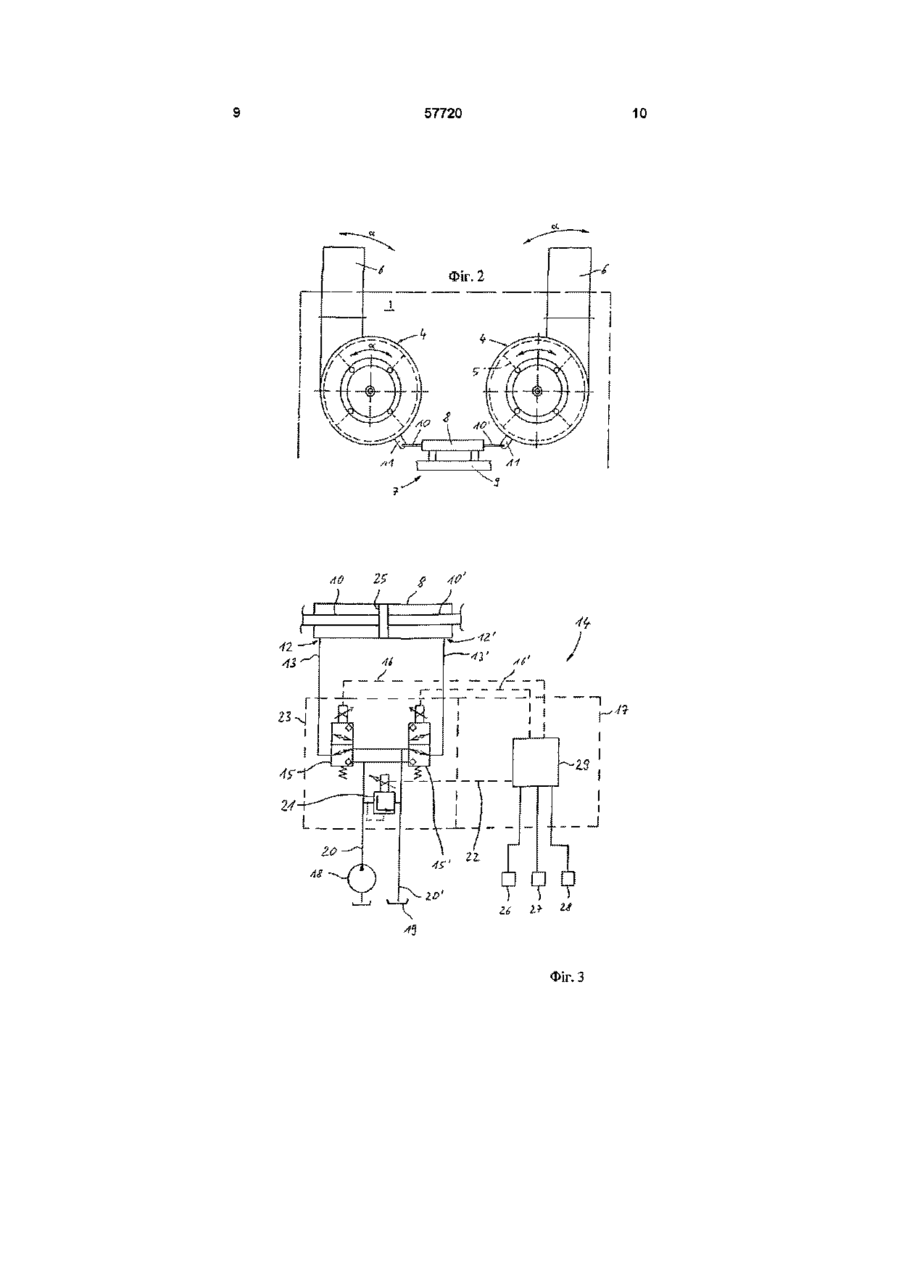
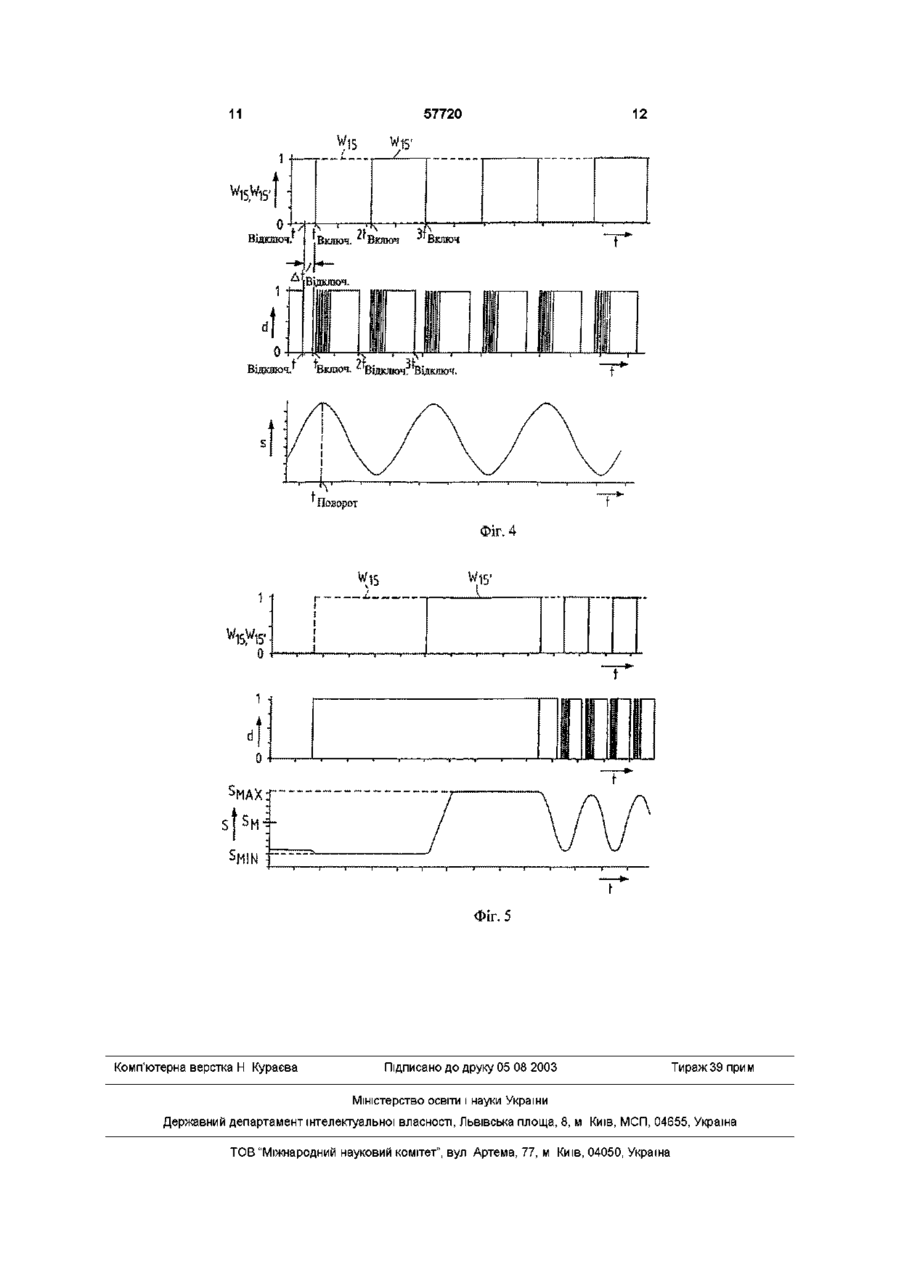
1 Спосіб розвантаження матеріалу, зокрема соломи, причому циліндр з робочою рідиною рухається з во ротно-поступально для виконання поворотного руху розвантажувальної повітродувки, що щонайменше один ходовий клапан регулюється електричним струмом, який відрізняється тим, що щонайменше один ходовий клапан регулюється електричним струмом таким чином, що поршень циліндра з робочою рідиною в режимі повороту в зоні повернення поршня навантажується поступово зростаючим, вихідним від приводу тиском, і що робочий тиск кореспондуючого ходового клапана падає до досягнення моменту переключення (Івключ) клапанів 2 Спосіб за п 1, який відрізняється тим, що переключення ходового клапана відбувається в момент зворотного переключення клапана О^ключ) перед досягненням моменту зворотного ходу (Поворот) ПОРШНЯ 3 Спосіб за п 1 або 2, який відрізняється тим, що перед переключенням ходового клапана в момент зворотного переключення клапана О^ключ) клапан регулювання тиску вже відключається в тимчасовому інтервалі (tBiflKn), в результаті чого циліндр з робочою рідиною не навантажується робочим тиском 4 Спосіб за одним з пунктів 1 -3, який відрізняється тим, що поршень після переключення ходових клапанів навантажується в середньому ЛІНІЙНО зростаючим робочим тиском 5 Спосіб за одним з пунктів 1-4, який відрізняється тим, що клапан регулювання тиску після переключення ходових клапанів для досягнення ЛІНІЙНОГО підйому тиску регулюється за допомогою електронної системи управління дальніми імпульсами 6 Пристрій для розвантаження матеріалу, зокрема соломи, з поворотним блоком, який містить розвантажувальну повітродувку та сполучений з розвантажувальною повітродувкою з можливістю взаємодії циліндра з робочою рідиною, з блоком управління, який має щонайменше один клапан для регулювання циліндра з робочою рідиною, так що щонайменше розвантажувальна труба розвантажувальної повітродувки встановлена з можливістю повороту туди і назад, який відрізняється тим, що блок управління має клапан регулювання тиску та що передбачена електрична система управління, яка навантажує клапан регулювання тиску і/або ходовий клапан таким чином, що поршень циліндра з робочою рідиною виконує по суті гармонійний зворотно-поступальний рух 7 Пристрій за п 6, який відрізняється тим, що блок управління має гідравлічну систему регулювання, з гідравлічним циліндром, виконаним у вигляді циліндра з робочою рідиною, з джерелом тиску для надання робочій рідині, з нагромаджуючим робочу рідину резервуаром, причому клапан регулювання тиску через трубопровід для робочої рідини сполучений з одного боку з джерелом тиску, а з іншого боку з резервуаром для регулювання заданого робочого тиску 8 Пристрій за п 6 або 7, який відрізняється тим, що циліндр з робочою рідиною виконаний у вигляді циліндра з робочою рідиною подвійної дії з розташованим в зоні торцевої сторони сполученням для робочої рідини 9 Пристрій за одним з пунктів 6 - 8, який відрізняється тим, що гідравлічна система регулювання має два 3/2-ходових клапани, які в режимі повороту навперемінно включають подачу та ВІДТІК ДО І ВІД циліндра з робочою рідиною 10 Пристрій за одним з пунктів 6-9, який відрізняється тим, що блок управління має електричну систему управління, яка з боку входу сполучена з датчиком фактичного значення кута повороту, датчиком заданого значення кута повороту та датчиком заданого значення корекції бокового вітру, і що електрична система управління в режимі повороту безперервно визначає на основі О 1 ю 57720 порівняння індикованого за допомогою датчика фактичного значення кута повороту дійсної точки повернення поршня із заданою точкою повернення моментів переключення (Івключ) ходових клапанів і/або моментів відключення (tBiflKn) клапана регулювання тиску 11 Пристрій за п 10, який відрізняється тим, що електрична система управління має засоби для розрахунку заданої точки повернення на основі даних номінального значення датчика кута повороту та номінального значення датчика корекції бокового вітру 12 Пристрій за одним з пунктів 6 - 11, який відрізняється тим, що електрична система управління генерує періодичний сигнал управління (d) для управління клапаном регулювання тиску, який на ДІЛЯНЦІ повернення поршня відрізняється ЛІНІЙНИМ піднесенням 13 Пристрій за п 10, який відрізняється тим, що електрична система управління має засоби для створення управляючого сигналу (d, w-is, W15), у вигляді цифрового сигналу, зокрема у вигляді управляючого дальніми імпульсами цифрового сигналу 14 Пристрій за одним з пунктів 6 -11, який відрізняється тим, що передбачено засоби для юстування таким чином, що в режимі юстування максимальні точки повернення (SMAX, SMIN) поршня йдуть одна за одною та індикуються, і що слідом за цим на основі індикованих значень повернення розраховується механічна середня позиція (SM) поршня Винахід стосується способу та пристрою для розвантаження матеріалу згідно з обмежувальною частиною пунктів 1 і 6 формули винаходу З опису заявки на патент № ЕР 0 631 717 АІ відомо, що для розвантаження матеріалу передбачений поворотний блок з розвантажувальною повітродувкою, у якого циліндр з робочою рідиною рухається зворотно-поступально для виконання поворотного руху розвантажувальною повітродувкою Викид матеріалу відбувається на заданій ширині Відомо, ЩО ДЛЯ регулювання руху розташованого в циліндрі з робочою рідиною поршня передбачені ходові клапани, які навперемінно відкривають і закривають подачу до протилежно розташованих в торцевій зоні циліндра з робочою рідиною місць приєднання Для вирівнювання ПІКІВ тиску в мертвих точках поршня передбачений нагромаджувач, який однак при підвищених циклах переключення зазнає більших навантажень Тому завдання даного винаходу полягає в тому, щоб таким чином вдосконалити спосіб та пристрій для розвантаження матеріалу, щоб створити надійну і недорогу систему регулювання роботи циліндра з робочою рідиною Вирішення цього завдання згідно з винаходом досягається завдяки ВІДМІТНИМ ознакам, зазначеним в пунктах 1 і 6 формули винаходу Перевага способу згідно з винаходом ВІДПОВІДНО до пункту 1 формули винаходу полягає втому, що завдяки електронному управлінню клапаном може бути виконаний необхідний заданий гармонійний рух поршня Завдяки цьому рух поршня може навперемінно пристосовуватися до будьяких вимог режиму повороту Більш прийнятне навантажувати поршень, починаючи з моменту переключення клапана поступово зростаючим тиском, що виходить від привода, так щоб постійно міг здійснюватися рух поршня в зоні мертвої точки Більш прийнятне навантажувати поршень в зоні повернення його зменшеним тиском, який виходить від привода Згідно З наступною формою здійснення винаходу управління регулювальним клапаном здійснюється за допомогою електронної системи управління дальніми імпульсами, за допомогою якої забезпечується лінійне підняття робочого тиску для створення безупинного поворотного руху У пристрої згідно з винаходом ВІДПОВІДНО ДО пункту 6 формули регулювальний клапан виконаний у вигляді клапана регулювання тиску, який переключається за допомогою електричної системи управління Завдяки управлінню клапаном регулювання тиску можна регулювати заданий розподіл тиску всередині циліндра з робочою рідиною, який забезпечує в режимі повороту гармонійне проходження руху поршня Досягається безупинний поворотний рух, і блок управління відрізняється тривалим терміном служби Згідно З особливою формою здійснення винаходу з циліндром з робочою рідиною сполучені два 3/2-ходових клапани, які регулюються навперемінно для генерування руху поршня туди і назад в циліндрі з робочою рідиною Ці ХОДОВІ клапани дозволяють здійснювати швидке переключення без періоду простою Згідно З наступною формою здійснення винаходу блок управління має гідравлічну систему регулювання із забезпечуючим надійний режим повороту гідравлічним циркуляційним контуром, який включає джерело тиску робочої рідини та резервуар для робочої рідини Завдяки управлінню клапаном регулювання тиску тиск в трубопроводах робочої рідини можна варіювати в залежності від показань електричної системи управління Згідно З наступною формою здійснення винаходу електрична система управління має засоби, за допомогою яких в залежності від діючих умов можна заново визначати моменти переключення для клапанів Завдяки цьому створюється навчальна система, яка реагує на змінені параметри стану та утримує необхідний гармонійний режим повороту Наступні переваги винаходу описані в подальших пунктах формули винаходу Приклад здійснення винаходу пояснюється нижче більш докладно за допомогою креслення На ньому показані на фіг 1 - схематичний вигляд ззаду агротехнічного подрібнювача стебельчастої маси з двома 57720 виконаними поворотними кидал камиповітродувками, на фіг 2 - схематичний вигляд зверху обох кидалок-повітродувок згідно з фіг 1, на фіг 3 - блок-схема системи управління, призначеної для управління системою повороту, на фіг 4 - тимчасова характеристика станів переключення клапана і ходу поршня циліндра з робочою рідиною в режимі повороту, на фіг 5 - тимчасова характеристика станів переключення клапана і ходу поршня в режимі юстування системи повороту Винахід може бути застосований усюди, там, де необхідно тривалий час утримувати рівномірне повертання конструктивного вузла Наприклад, винахід може бути використаний у пристрої для розкидання солі в системі вуличного руху або, як описано нижче, в агротехнічному подрібнювачі стебельчастої маси для зернозбирального комбайна Як видно з фіг 1 в поєднанні з фіг 2, агротехнічний подрібнювач стебельчастої маси 1 містить подрібнювач соломи 2, до якого з нижньої сторони приєднаний передавальний бункер 3, що подає подрібнену солому до розвантажувальної повітродувки 4 Розвантажувальна повітродувка 4 має робоче колесо 5, яке подає солому до розвантажувальної труби 6, через яку солома вивантажується в оточуюче середовище Обидві розташовані паралельно одна до одної розвантажувальні повітродувки 4 сполучені одна з одною за допомогою поворотного блока 7, причому при роботі поворотного блока 7 розвантажувальна труба 6 рухається в бічному напрямі зворотно-поступально Поворотний блок 7 складається по суті з циліндра з робочою рідиною 8, який закріплений на нерухомому опорному елементі 9 Циліндр з робочою рідиною 8 виконаний у вигляді циліндра подвійної дії і має два приєднаних з двох боків до поршня 25 поршневих штоки 10, 10' Поршневі штоки 10, 10' на своєму вільному КІНЦІ шарнірно приєднані до шарнірного елемента 11 розвантажувальної повітродувки 4 З торцевої сторони циліндра з робочою рідиною 8 передбачене сполучення 12, 12' для з'єднання трубопроводу з робочою рідиною 13, 13 і Блок управління 14 регулює навперемінне навантаження сполучень 12, 12' з робочою рідиною, так що розвантажувальна труба 6 рівномірно рухається зворотно-поступально навколо заданого кута повороту а Як показано на фіг 3, сполучення 12, 12' з'єднані з 3/2-ходовими клапанами 15 і 15', які обладнані електромагнітом і можуть бути приведені в дію електричним струмом через ЛІНІЮ управління 16 і 16' Ходові клапани 15, 15' виконані у вигляді клапанного гідроапарата Електрична система управління 17 переключає ходові клапани шляху 15, 15' в положення відкриття і закриття таким чином, що ходові клапани 15, 15' навперемінно з'єднуються з джерелом тиску 18 та резервуаром 19 через трубопроводи робочої рідини 20 і 20' Джерело тиску 18 видає постійний об'ємний струм Як виразно показано на фіг 4, в режимі повороту в першому положенні переключення робоча рідина через трубопровід робочої рідини 13 пода ється до сполучення 12 циліндра з робочою рідиною 8 і у протилежно розташованого сполучення 12 через трубопровід робочої рідини 13' спрямовується у вигляді відтоку до іншого 3/2-ходового клапана 15' У наступному другому положенні переключення ходових клапанів 15, 15', в якому поршень 25 циліндра з робочою рідиною 8 рухається у зворотному напрямі, трубопровід з робочою рідиною 13' служить як приплив, у той час як трубопровід з робочою рідиною 13 служить як ВІДТІК Між трубопроводами з робочою рідиною 20 і 20' розміщений клапан регулювання тиску 21, який приводиться у дію електричним струмом та через ЛІНІЮ управління 22 зв'язаний з електричною системою управління 17 Клапан регулювання тиску 21 виконаний у вигляді запобіжного клапана Описані вище клапани 15, 15', 2 1 , а також джерело тиску 18 і резервуар 19 утворюють гідравлічну систему управління 23, яка у взаємодії з електричною системою управління 17 дозволяє здійснювати безперервний поворотний рух розвантажувальної труби 6 З s/t-діаграми шлях-час поршня 25, показаної на фіг 4 виразно видно, що створюється гармонійний поворотний рух С цією метою навперемінно включаються і виключаються сигнали регулювання шляху Wi5, W15 Клапан регулювання тиску 21 за допомогою сигналу регулювання тиску d в зоні мертвої точки поршня 25 встановлюється таким чином, щоб в трубопроводах з робочою рідиною 13, 13' або в циліндрі з робочою рідиною 8 створювався понижений тиск або тиск на вході Більш прийнятне ще до досягнення моменту переключення tBKjira4 клапанів 15, 15' регулювати клапан регулювання тиску 21 таким чином, щоб створювався мінімальний тиск Водночас з переключенням ходових клапанів 15, 15' поступово за допомогою клапана регулювання тиску 21 тиск підвищується до максимального значення Це в середньому лінійне піднесення тиску може бути здійснене, наприклад, за допомогою системи управління дальніми імпульсами Для створення гармонійного коливального руху поршня 25 достатньо, щоб максимальний тиск зберігався без змін до моменту відключення tBiflKji клапана регулювання тиску 2 1 , у який поршень 25 пройшов своє середнє ПОЛОЖеННЯ В МОМеНТ ВІДКЛЮЧеННЯ tBiflKji Тиск миттєво зменшується до мінімального значення і зберігається на цьому рівні до наступного моменту переключення Івключ Цей утворюваний таким чином тимчасовий інтервал відключення AteiflKn є достатнім перед моментом зворотного переключення Поворот поршня 25, так що забезпечується гармонійне прискорення поршня 25 в зоні мертвих точок Альтернативно замість двох 3/2-ходових клапанів 15, 15' може бути застосований навіть один єдиний 4/3-ходовий клапан Цей клапан у порівнянні з комбінацією з двох окремих клапанів має той недолік, що при переключенні утворюються періоди простою, так що застосування одного єдиного 4/3-ходового клапана навряд чи становить займаюче друге за якістю вирішення Електрична система управління 17 з боку входу сполучена з датчиком фактичного значення 57720 кута повороту 26, датчиком заданого значення кута повороту 27 та датчиком заданого значення корекції бокового вітру 28 З боку виходу електрична система управління 17 має ПІДХІДНІ до клапанів 15, 15', 21 управляючі лінії 16, 16', 22 Для обробки вхідних сигналів або для створення управляючих сигналів w-is, w-is, d для клапанів 15, 15', 21 електрична система управління 17 містить мікроконтролер 29, який в залежності від вхідних величин безперервно розраховує управляючі сигнали податку w-is, w-is, d Як показано на фіг 5, перед введенням у дію режиму повороту здійснюється процес юстування, протягом якого показані на діаграмі кінцеві піки ходу поршня 25, тобто максимальне відхилення SMAX, S M I N п о р ш н я 2 5 Після цього при утворенні середньої величини обох нагромаджених значень кінцевих ПІКІВ можна визначити середню позицію SM поршня 25 Якщо задані максимальне та мінімальне значення SMAX/SMIN не досягаються, в бортову інформаційну систему через CAN-шину надходить повідомлення про помилку, у той час як ходові клапани 15, 15' одночасно включаються без струму до наступного включення системи управління В результаті цього процесу юстування на початку процесу управління механічне юстування датчика фактичного значення може бути виключене Крім того в результаті цього процесу може бути виявлено розрив кабелю або дефект клапана, так що додатково забезпечується контроль функціонування Після успішного закінчення процесу юстування система управління може бути переведена в режим повороту В залежності від заданого номінального значення кута повороту 27 і в даному випадку додатково до номінального значення корекції бокового вітру 28 ходові клапани 15, 15' і 21 регулюються лише періодично, причому безперервно визначається за допомогою датчика фактичного 8 значення 26 дійсна точка повернення поршня 25 та порівнюється з розрахованою на основі номінального значення кута повороту 27 і номінального значення корекції бокового вітру 28 заданою номінальною точкою повернення В залежності від величини порівняння розраховується новий момент відключення (tBiflKji) і здійснюється відповідне регулювання клапана регулювання тиску 21, так що навіть при перешкодах досягається надійний і безупинний рух повороту Таким способом створюється навчальна система, яка реагує на збурюючі дії, що з'являються в даному випадку, такі, наприклад, як коливальна температура масла, тертя в системі, різні моменти включення клапана, та регулює їх в рамках періодичного режиму повороту Щоб не траплялося надмірного перерегулювання, в мікроконтролері 29 передбачено, що за один процес повороту регулюється приблизно 1/8 відхилення між номінальним значенням кута повороту 27 і фактичним значенням датчика кута повороту 26 ШЛЯХОМ ЗСуву МОМеНТу ВІДКЛЮЧеННЯ (tBiflKji) Завдяки цьому гарантується, що при миттєвій ЗМІНІ одного з параметрів стану йдучий за ним динамічний стан контрольовано переходить в статичний стан Альтернативно ходові клапани 15, 15' можуть бути виконані також у вигляді пропорційних ходових клапанів Таким чином в даному випадку можна було б відмовитися від клапана регулювання тиску Замість нього управління для досягнення гармонійного процесу повороту могло б здійснюватися за допомогою узгодженого з безпосереднім управлінням ходовими клапанами мікроконтролера29 Альтернативно описаній вище гідравлічній системі управління пристрій згідно з винаходом може мати також пневматичну систему управління Вид системи управління залежить від застосування та від величини необхідного часу переключення 57720 10 Фіг.З 57720 11 (И ВІдключ.' а і Включ. Вкточ зг 12 Вшоч д •і; О Вігрлюч/ 'Включ. ^ ВідкяючГ Відкпюч.Поворот ФІГ. 4 W5 1 s HiN : Фіг. 5 Комп'ютерна верстка Н Кураєва Підписано до друку 05 08 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and a device for unloading material
Автори англійськоюStrieker Norbert, Hugenroth Ludger
Назва патенту російськоюСпособ и устройство для разгрузки материала
Автори російськоюШтрикер Норберт, Хугенрот Лудгер
МПК / Мітки
МПК: A01D 43/00, F15B 11/00, A01D 41/12
Мітки: матеріалу, пристрій, розвантаження, спосіб
Код посилання
<a href="https://ua.patents.su/6-57720-sposib-i-pristrijj-dlya-rozvantazhennya-materialu.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для розвантаження матеріалу</a>
Пристрій для розвантаження матеріалу із стрічкового конвейєра

Номер патенту: 2412
Опубліковано: 26.12.1994
Автори: Дубинський Микола Борисович, Галацький Вадим Євсійович, Недобор Станіслав Дмитрович
МПК: B65G 47/74
Мітки: матеріалу, розвантаження, стрічкового, конвейєра, пристрій
Формула / Реферат:
1. Устройство для разгрузки материала с лей-точного конвейєра, включающее расположенные над лентой последнего подвижные в горизонтальной плоскости створки-отвалы, смонтированный на раме ленточного конвейера привод, кинематически связанный со створками-отвалами, и отводящие течки, отличающееся тем, что, с целью повышения эффективности работы устройства путем обеспечения дифференцированного удаления материала с ленты конвейера, оно снабжено...
Пристрій подачі порошкоподібного матеріалу
Номер патенту: 41542
Опубліковано: 17.09.2001
Автори: Соколов Володимир Ілліч, Коваленко Алім Олексійович, Дядічев Костянтин Михайлович, Епіфанова Ольга Вікторівна
МПК: F15C 3/00
Мітки: матеріалу, подачі, пристрій, порошкоподібного
Формула / Реферат:
Пристрій подачі порошкоподібного матеріалу, що містить бункер, з'єднаний з дозатором як регулятором витрати, ежектор з камерою змішування, який відрізняється тим, що регулятор витрати порошкоподібного матеріалу виконаний у вигляді клапана з регулятором, що може керуватися тиском в камері змішування.
Спосіб розвантаження транспортного засобу і транспортний засіб для транспортування матеріалу у вигляді порошку, гранул і/або кульок
Номер патенту: 39854
Опубліковано: 16.07.2001
Автор: Веллінк Теодорус Антоніус
МПК: B65G 53/04, B60P 3/22, B60P 1/00
Мітки: транспортний, засобу, спосіб, транспортування, транспортного, засіб, вигляді, матеріалу, гранул, розвантаження, кульок, порошку
Формула / Реферат:
1. Способ разгрузки транспортного средства, загруженного материалом в виде порошка, гранул, и/или шариков, в котором во время разгрузки, по меньшей мере, одного из резервуаров воздушный поток направляют через выпускную трубу, а материал через открытый перекрывающий элемент воронки резервуара подают в этот воздушный поток у накопителя, размещенного под открытым перекрывающим элементом, и в котором во время разгрузки пространство в одном...
Спосіб розвантаження стосів аркушів і пристрій для розвантаження стосів аркушів
Номер патенту: 46053
Опубліковано: 15.05.2002
Автори: Берчі Даніель, Віссмюллєр Філіпп
МПК: B65H 31/30
Мітки: стосів, пристрій, розвантаження, аркушів, спосіб
Формула / Реферат:
1. Спосіб розвантаження стосів аркушів на виході з машини для виробництва цінних паперів, яка має принаймні один стелаж з піддонами, який відрізняється тим, що включає установку контейнера, яка містить принаймні одні дверцята з боку стелажа з піддонами, фіксацію та блокування контейнера відносно до стелажа, перевантаження піддонів із стосами зі стелажа у контейнер, закриття дверцят контейнера, розблокування контейнера з забезпеченням...
Автомат розвантаження насоса

Номер патенту: 5063
Опубліковано: 28.12.1994
Автори: Мокроуз Василь Климентьйович, Хохуля Леонід Іванович, Кутвицький Ігор Олександрович, Ботигін Адольф Валеріанович
МПК: F15B 13/01
Мітки: автомат, розвантаження, насоса
Формула / Реферат:
Автомат разгрузки насоса, содержащий гальзу и поршень с толкателем, взаимодействующим с подпружиненным клапаном, подклапанная полость которого соединена со сливом, а полость пружины - с насосом и с подклапанной полостью обратного клапана, надклапанная полость которого связана с рабочей полостью поршня и с гидроаккумулятором, отличающийся тем, что, с целью повышения быстродействия, подпружиненный клапан выполнен в виде плунжера,...
Попередній патент: Механотерапевтичний пристрій
Наступний патент: Ротор косарки-граблів
Випадковий патент: Спосіб виготовлення термозміцнених сталевих молольних куль