Пристрій для визначення рухливості зубів
Номер патенту: 65892
Опубліковано: 12.12.2011
Автори: Царьков Євгеній Олександрович, Царькова Тетяна Олександрівна, Косенко Костянтин Миколайович, Коваленко Микола Олексійович, Громов Олег Владиславович, Альберт Євгеній Леонідович


Формула / Реферат
Пристрій для визначення рухливості зубів, що містить блок задання навантаження, датчик переміщення зі штоком, схват і реєстратор, який відрізняється тим, що на виносному кронштейні один над іншим на двох півосях установлені вузли базування окремо для нижньої і верхньої щелеп, при цьому піввісь вузла базування на нижній щелепі має підп'ятник зі сферичним дном, з яким взаємодіє сферична головка півосі вузла базування на верхній щелепі, кожен вузол базування складається з пластини кутової форми з відігнутими краями та установленими на них чотирма регульованими упорами, при цьому пластина на нижній щелепі має кут 110°-130° і виступ з фіксатором для виносного кронштейна, а пластина на верхній щелепі має кут 130°-150° і виступ, на якому встановлений мікровимикач, взаємодіючий зі сферичним торцем підпружиненої півосі вузла базування на верхній щелепі, вихід якого з'єднаний із входом реєстратора, і опорна пластина для контакту з зубами і консольний виступ для двох регульованих упорів, контактуючих з піднебінням, кожний з регульованих упорів складається зі стрижня з різьбою, на одному кінці якого завалькована шайба з пружним елементом, і головки з насічкою, при цьому головка з насічкою розташована на іншому кінці стрижня, виносний кронштейн складається з пластини, у якій виконаний криволінійний паз для просторової установки блока задання навантаження й отвір під фіксатор пластини вузла базування на нижній щелепі, блок задання навантаження виконаний у вигляді плати з установленими на ній із зовнішньої сторони пневмоциліндром двосторонньої дії, датчика переміщення зі штоком і двох важелів, з'єднаних шарнірно, при цьому вісь шарніра встановлена перпендикулярно платі, що зв'язана з виносним кронштейном ступінчастою віссю, при цьому пневмоциліндр двосторонньої дії містить два поршні і два штоки, розміщені в одному корпусі, приєднаному пневмомережею до джерела тиску, датчик переміщення зі штоком оснащений гвинтовою парою, з'єднаною з повзуном резистора перемінного опору, вихід якого з'єднаний із входом реєстратора, важелі виконані Z-подібної форми, між короткими плечима яких поруч розміщені пневмоциліндр двосторонньої дії і датчик переміщення зі штоком, при цьому штоки пневмоциліндра встановлені з можливістю взаємодії з короткими плечима важелів, а шток датчика переміщення рухливо з'єднаний з одним з важелів через паз важеля і виступ чи гвинт на штоку, схват утворений загостреними П-подібними виступами, виконаними на довгих підпружнених кінцях важелів, ступінчаста вісь виконана перемінного діаметра, оснащена сферичним підп'ятником, верхньою і нижньою конічними шайбами зі сферичним сідлом кожна, і фігурною гайкою, оснащеною сферичною головкою, взаємодіючою зі сферичним підп'ятником.
Текст
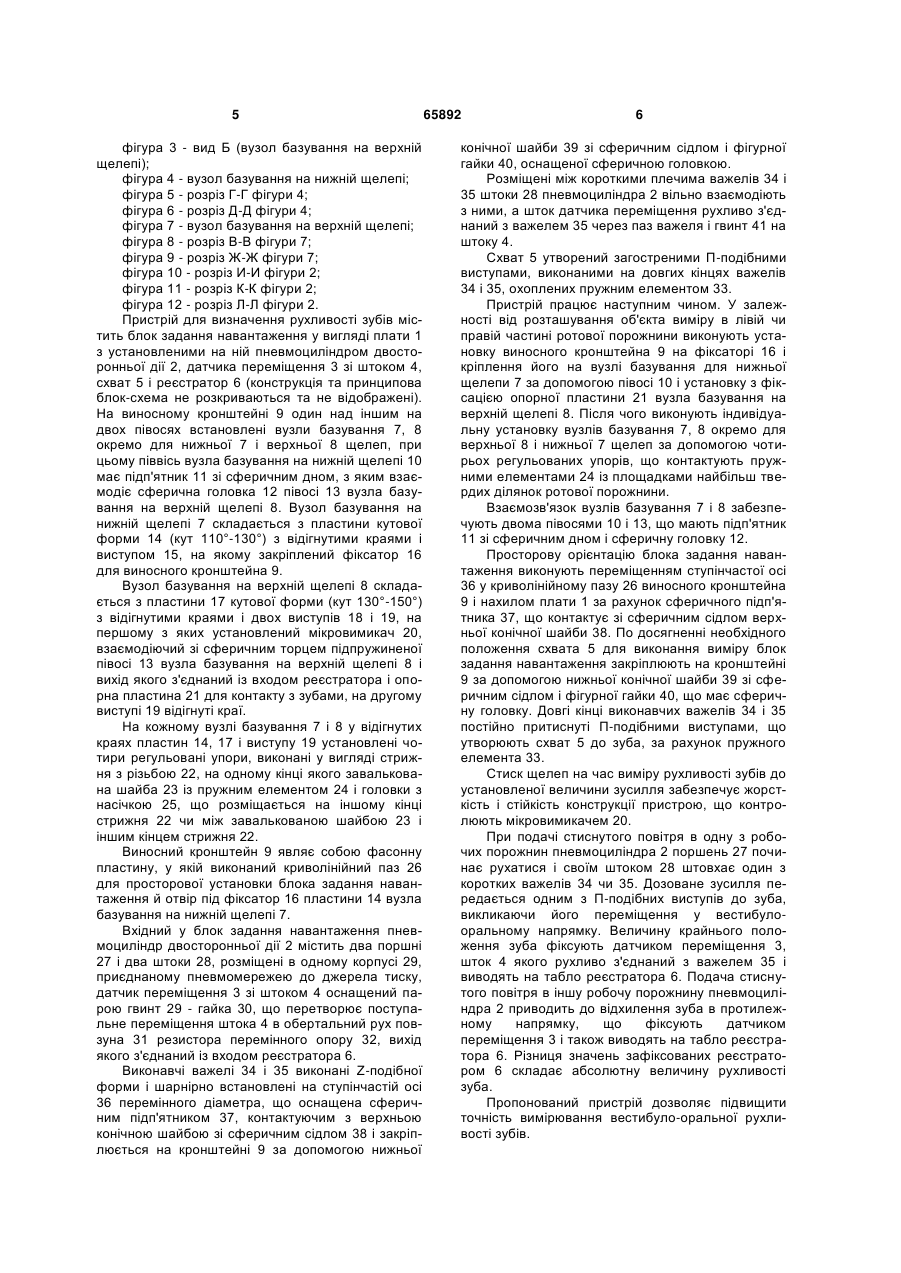
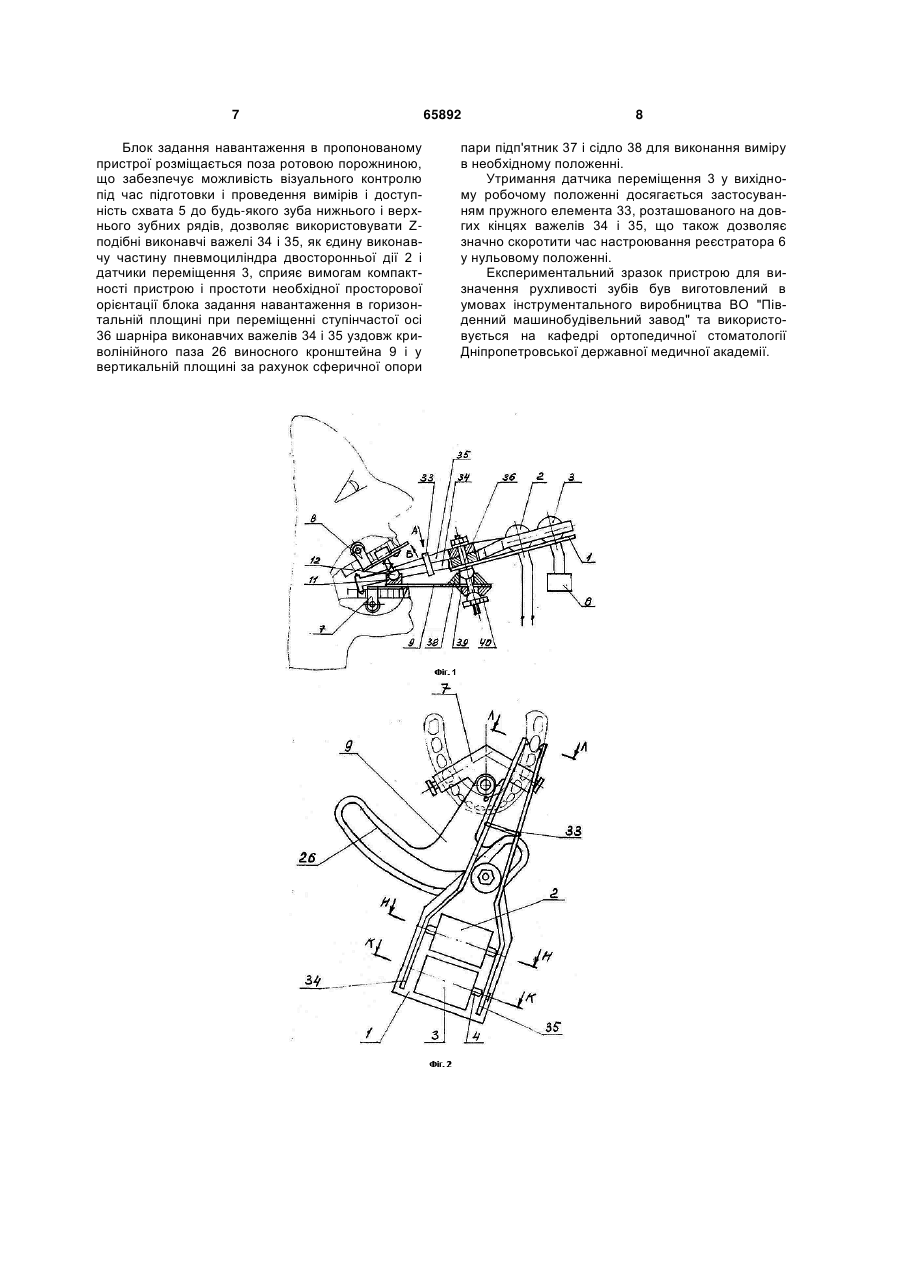
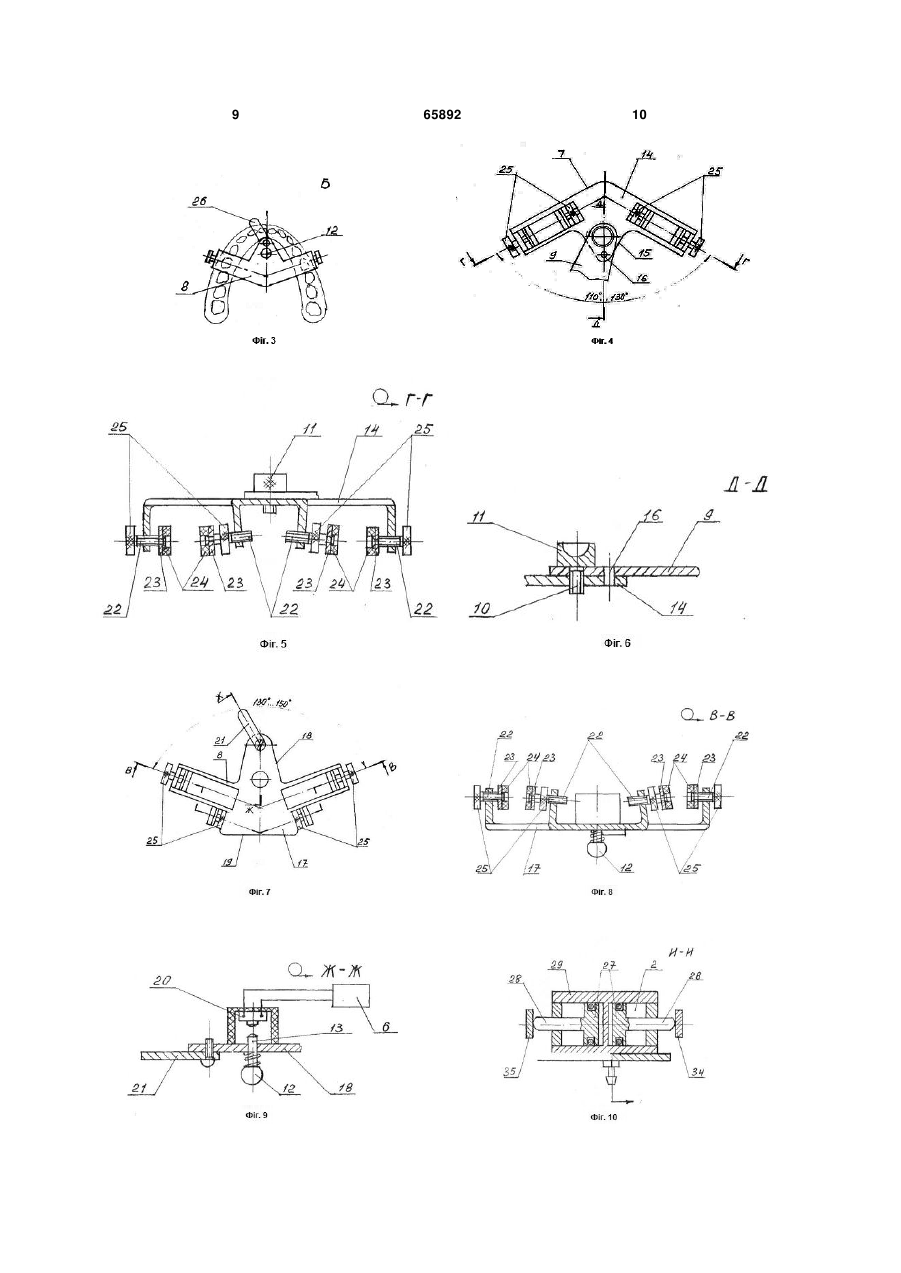
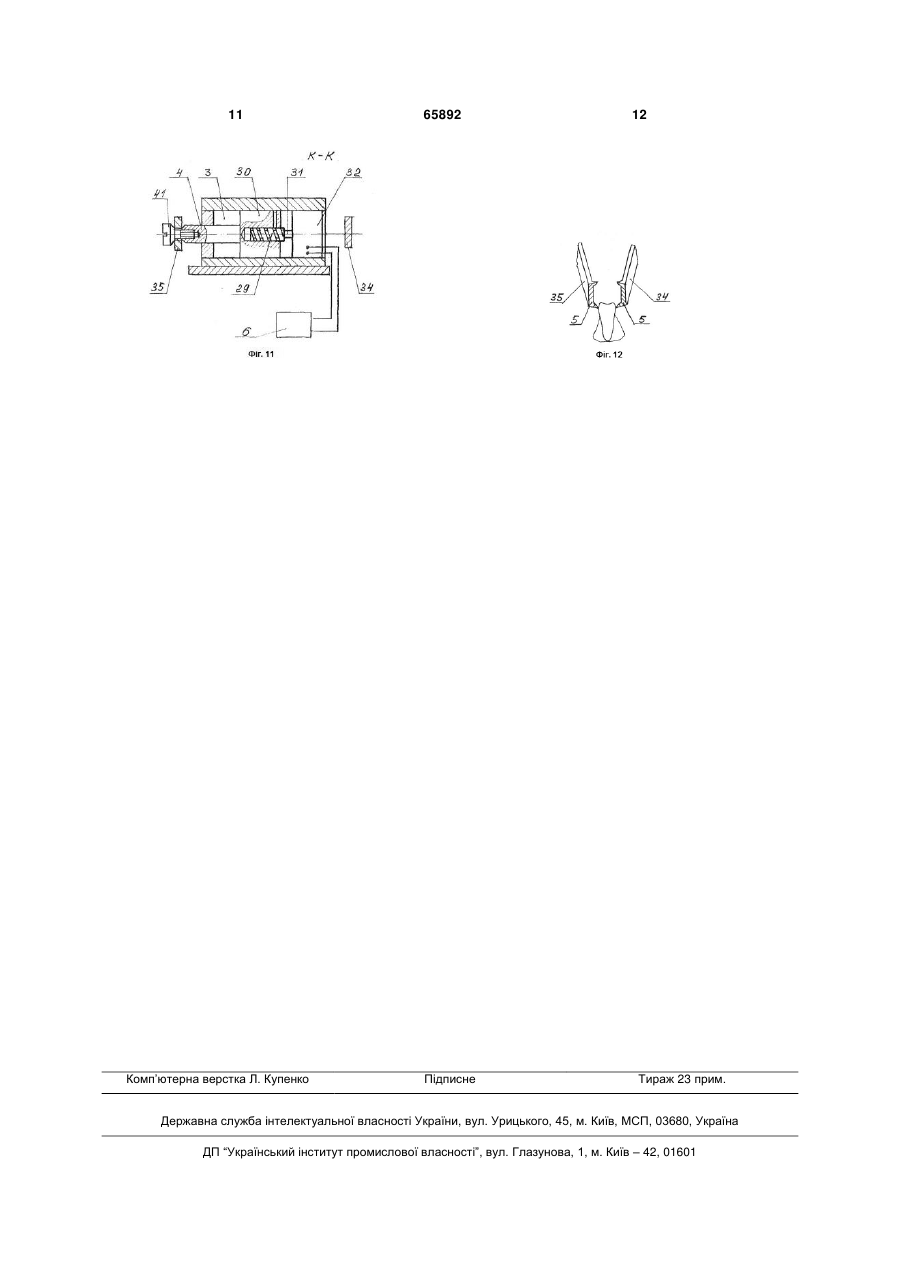
Пристрій для визначення рухливості зубів, що містить блок задання навантаження, датчик переміщення зі штоком, схват і реєстратор, який відрізняється тим, що на виносному кронштейні один над іншим на двох півосях установлені вузли базування окремо для нижньої і верхньої щелеп, при цьому піввісь вузла базування на нижній щелепі має підп'ятник зі сферичним дном, з яким взаємодіє сферична головка півосі вузла базування на верхній щелепі, кожен вузол базування складається з пластини кутової форми з відігнутими краями та установленими на них чотирма регульованими упорами, при цьому пластина на нижній щелепі має кут 110°-130° і виступ з фіксатором для виносного кронштейна, а пластина на верхній щелепі має кут 130°-150° і виступ, на якому встановлений мікровимикач, взаємодіючий зі сферичним торцем підпружиненої півосі вузла базування на верхній щелепі, вихід якого з'єднаний із входом реєстратора, і опорна пластина для контакту з зубами і консольний виступ для двох регульованих упорів, контактуючих з піднебінням, кожний з регульованих упорів складається зі стрижня з різьбою, на одному кінці якого завалькована шайба з пружним елементом, і головки з насічкою, при цьому голов U 2 (11) 1 3 вимірювальним штоком, що має паз, у якому встановлений рухливий волоконний світловод, з'єднаним із джерелами світла і встановлений напроти датчика переміщення штока, виконаного у вигляді нерухомих волоконних світловодів, вихідні кінці яких встановлені на вимірювальній шкалі реєстратора. Вагомим недоліком відомого пристрою є залежність точності виміру від діаметра світлових волокон і точності їхнього укладання, необхідності збільшення світлової плями. Метод задання навантаження не дозволяє визначити реальну величину рухливості зуба, тобто метод виміру є відносним. Конструкція пристрою-прототипу складна і громіздка, не може бути розташована у порожнині рота, через що можливим є вимір тільки зубів доступних ззовні. Пристрій не має механізму базування. Наявність еластичного пружного схвату не забезпечує передачу навантаження, що задається на зуб, що знижує вірогідність навіть відносного виміру. В основу винаходу поставлена задача збільшення точності вимірювання за рахунок прямого виміру стану опорно-утримуючої системи зуба та розширення діапазону вимірювань за рахунок забезпечення доступу до усіх відділів зубного ряду. Задача, що поставлена, вирішується тим, що в пристрої для визначення рухливості зубів, що містить блок задання навантаження, датчик переміщення зі штоком, схват і реєстратор, відповідно до корисної моделі, на виносному кронштейні один над іншим на двох півосях установлені вузли базування окремо для нижньої і верхньої щелеп, при цьому піввісь вузла базування на нижній щелепі має підп'ятник зі сферичним дном, з яким взаємодіє сферична головка півосі вузла базування на верхній щелепі, кожен вузол базування складається з пластини кутової форми з відігнутими краями та установленими на них чотирма регульованими упорами, при цьому пластина на нижній щелепі о має кут 110 -130° і виступ з фіксатором для виносного кронштейна, а пластина на верхній щелепі має кут 130°-150° і виступ, на якому встановлений мікровимикач, взаємодіючий зі сферичним торцем підпружиненої півосі вузла базування на верхній щелепі і вихід якого з'єднаний із входом реєстратора, і опорна пластина для контакту з зубами і консольний виступ для двох регульованих упорів, контактуючих з піднебінням, кожний з регульованих упорів складається зі стрижня з різьбою, на одному кінці якого завалькована шайба з пружним елементом, і головки з насічкою, при цьому головка з насічкою розташована на іншому кінці стрижня, виносний кронштейн складається з пластини, у якій виконаний криволінійний паз для просторової установки блока задання навантаження й отвір під фіксатор пластини вузла базування на нижній щелепі, блок задання навантаження виконаний у вигляді плати з установленими на ній із зовнішньої сторони пневмоциліндром двосторонньої дії, датчика переміщення зі штоком і двох важелів, з'єднаних шарнірно, при цьому вісь шарніра встановлена перпендикулярно платі, що зв'язана з виносним кронштейном ступінчастою віссю, при цьому пневмоциліндр двосторонньої дії містить 65892 4 два поршні і два штоки, розміщені в одному корпусі, приєднаному пневмомережею до джерела тиску, датчик переміщення зі штоком оснащений гвинтовою парою, з'єднаною з повзуном резистора перемінного опору, вихід якого з'єднаний із входом реєстратора, важелі виконані Z-подібної форми, між короткими плечима яких поруч розміщені пневмоциліндр двосторонньої дії і датчик переміщення зі штоком, при цьому штоки пневмоциліндра встановлені з можливістю взаємодії з короткими плечима важелів, а шток датчика переміщення рухливо з'єднаний з одним з важелів через паз важеля і виступ чи гвинт на штоку, схват утворений загостреними П-подібними виступами, виконаними на довгих підпружнених кінцях важелів, ступінчаста вісь виконана перемінного діаметра, оснащена сферичним підп'ятником, верхньою і нижньою конічними шайбами зі сферичним сідлом кожна, і фігурною гайкою, оснащеною сферичною головкою, взаємодіючою зі сферичним підп'ятником. Завдяки тому, що в пристрій для визначення рухливості зубів введені вузли базування окремо для нижньої і верхньої щелеп, що установлені на виносному кронштейні один над другим на двох півосях, дозволяє збільшити точність вимірювання за рахунок прямого виміру стану опорноутримуючої системи зуба та розширити діапазон вимірювань за рахунок забезпечення доступу до усіх відділів зубного ряду. Взаємозв'язані між собою за допомогою двох півосей окремі вузли базування забезпечують створення жорсткої базової конструкції пристрою, що виключає зсув щелеп у горизонтальній площині, а також можливість вимірювання рухливості зуба тільки при досягненні встановленого зусилля при стиску щелеп, що супроводжується включенням реєстратора і таким чином виключає вплив фактора індивідуальності дослідника на отримані результати вимірів. Розміщення блока задання навантаження поза ротовою порожниною забезпечує можливість візуального контролю під час підготовки і проведення вимірів і доступність схвата до будь-якого зуба нижнього і верхнього зубних рядів, дозволяє використовувати Z-подібні виконавчі важелі, як єдину виконавчу частину пневмоциліндра двосторонньої дії і датчики переміщення, сприяє вимогам компактності пристрою і простоти необхідної просторової орієнтації блока задання навантаження в горизонтальній площині. Утримання датчика переміщення у вихідному робочому положенні завдяки застосуванню пружного елемента, розташованого на довгих кінцях важелів, також дозволяє значно скоротити час настроювання реєстратора у нульовому положенні. Корисна модель пояснюється графічно наступними кресленнями: фігура 1 - вузли базування для верхньої і нижньої щелеп на виносному кронштейні з блоком задання навантаження; фігура 2 - вид А (вузол базування на нижній щелепі, виносний кронштейн із блоком задання навантаження); 5 фігура 3 - вид Б (вузол базування на верхній щелепі); фігура 4 - вузол базування на нижній щелепі; фігура 5 - розріз Г-Г фігури 4; фігура 6 - розріз Д-Д фігури 4; фігура 7 - вузол базування на верхній щелепі; фігура 8 - розріз В-В фігури 7; фігура 9 - розріз Ж-Ж фігури 7; фігура 10 - розріз И-И фігури 2; фігура 11 - розріз К-К фігури 2; фігура 12 - розріз Л-Л фігури 2. Пристрій для визначення рухливості зубів містить блок задання навантаження у вигляді плати 1 з установленими на ній пневмоциліндром двосторонньої дії 2, датчика переміщення 3 зі штоком 4, схват 5 і реєстратор 6 (конструкція та принципова блок-схема не розкриваються та не відображені). На виносному кронштейні 9 один над іншим на двох півосях встановлені вузли базування 7, 8 окремо для нижньої 7 і верхньої 8 щелеп, при цьому піввісь вузла базування на нижній щелепі 10 має підп'ятник 11 зі сферичним дном, з яким взаємодіє сферична головка 12 півосі 13 вузла базування на верхній щелепі 8. Вузол базування на нижній щелепі 7 складається з пластини кутової форми 14 (кут 110°-130°) з відігнутими краями і виступом 15, на якому закріплений фіксатор 16 для виносного кронштейна 9. Вузол базування на верхній щелепі 8 складається з пластини 17 кутової форми (кут 130°-150°) з відігнутими краями і двох виступів 18 і 19, на першому з яких установлений мікровимикач 20, взаємодіючий зі сферичним торцем підпружиненої півосі 13 вузла базування на верхній щелепі 8 і вихід якого з'єднаний із входом реєстратора і опорна пластина 21 для контакту з зубами, на другому виступі 19 відігнуті краї. На кожному вузлі базування 7 і 8 у відігнутих краях пластин 14, 17 і виступу 19 установлені чотири регульовані упори, виконані у вигляді стрижня з різьбою 22, на одному кінці якого завалькована шайба 23 із пружним елементом 24 і головки з насічкою 25, що розміщається на іншому кінці стрижня 22 чи між завалькованою шайбою 23 і іншим кінцем стрижня 22. Виносний кронштейн 9 являє собою фасонну пластину, у якій виконаний криволінійний паз 26 для просторової установки блока задання навантаження й отвір під фіксатор 16 пластини 14 вузла базування на нижній щелепі 7. Вхідний у блок задання навантаження пневмоциліндр двосторонньої дії 2 містить два поршні 27 і два штоки 28, розміщені в одному корпусі 29, приєднаному пневмомережею до джерела тиску, датчик переміщення 3 зі штоком 4 оснащений парою гвинт 29 - гайка 30, що перетворює поступальне переміщення штока 4 в обертальний рух повзуна 31 резистора перемінного опору 32, вихід якого з'єднаний із входом реєстратора 6. Виконавчі важелі 34 і 35 виконані Z-подібної форми і шарнірно встановлені на ступінчастій осі 36 перемінного діаметра, що оснащена сферичним підп'ятником 37, контактуючим з верхньою конічною шайбою зі сферичним сідлом 38 і закріплюється на кронштейні 9 за допомогою нижньої 65892 6 конічної шайби 39 зі сферичним сідлом і фігурної гайки 40, оснащеної сферичною головкою. Розміщені між короткими плечима важелів 34 і 35 штоки 28 пневмоциліндра 2 вільно взаємодіють з ними, а шток датчика переміщення рухливо з'єднаний з важелем 35 через паз важеля і гвинт 41 на штоку 4. Схват 5 утворений загостреними П-подібними виступами, виконаними на довгих кінцях важелів 34 і 35, охоплених пружним елементом 33. Пристрій працює наступним чином. У залежності від розташування об'єкта виміру в лівій чи правій частині ротової порожнини виконують установку виносного кронштейна 9 на фіксаторі 16 і кріплення його на вузлі базування для нижньої щелепи 7 за допомогою півосі 10 і установку з фіксацією опорної пластини 21 вузла базування на верхній щелепі 8. Після чого виконують індивідуальну установку вузлів базування 7, 8 окремо для верхньої 8 і нижньої 7 щелеп за допомогою чотирьох регульованих упорів, що контактують пружними елементами 24 із площадками найбільш твердих ділянок ротової порожнини. Взаємозв'язок вузлів базування 7 і 8 забезпечують двома півосями 10 і 13, що мають підп'ятник 11 зі сферичним дном і сферичну головку 12. Просторову орієнтацію блока задання навантаження виконують переміщенням ступінчастої осі 36 у криволінійному пазу 26 виносного кронштейна 9 і нахилом плати 1 за рахунок сферичного підп'ятника 37, що контактує зі сферичним сідлом верхньої конічної шайби 38. По досягненні необхідного положення схвата 5 для виконання виміру блок задання навантаження закріплюють на кронштейні 9 за допомогою нижньої конічної шайби 39 зі сферичним сідлом і фігурної гайки 40, що має сферичну головку. Довгі кінці виконавчих важелів 34 і 35 постійно притиснуті П-подібними виступами, що утворюють схват 5 до зуба, за рахунок пружного елемента 33. Стиск щелеп на час виміру рухливості зубів до установленої величини зусилля забезпечує жорсткість і стійкість конструкції пристрою, що контролюють мікровимикачем 20. При подачі стиснутого повітря в одну з робочих порожнин пневмоциліндра 2 поршень 27 починає рухатися і своїм штоком 28 штовхає один з коротких важелів 34 чи 35. Дозоване зусилля передається одним з П-подібних виступів до зуба, викликаючи його переміщення у вестибулооральному напрямку. Величину крайнього положення зуба фіксують датчиком переміщення 3, шток 4 якого рухливо з'єднаний з важелем 35 і виводять на табло реєстратора 6. Подача стиснутого повітря в іншу робочу порожнину пневмоциліндра 2 приводить до відхилення зуба в протилежному напрямку, що фіксують датчиком переміщення 3 і також виводять на табло реєстратора 6. Різниця значень зафіксованих реєстратором 6 складає абсолютну величину рухливості зуба. Пропонований пристрій дозволяє підвищити точність вимірювання вестибуло-оральної рухливості зубів. 7 Блок задання навантаження в пропонованому пристрої розміщається поза ротовою порожниною, що забезпечує можливість візуального контролю під час підготовки і проведення вимірів і доступність схвата 5 до будь-якого зуба нижнього і верхнього зубних рядів, дозволяє використовувати Zподібні виконавчі важелі 34 і 35, як єдину виконавчу частину пневмоциліндра двосторонньої дії 2 і датчики переміщення 3, сприяє вимогам компактності пристрою і простоти необхідної просторової орієнтації блока задання навантаження в горизонтальній площині при переміщенні ступінчастої осі 36 шарніра виконавчих важелів 34 і 35 уздовж криволінійного паза 26 виносного кронштейна 9 і у вертикальній площині за рахунок сферичної опори 65892 8 пари підп'ятник 37 і сідло 38 для виконання виміру в необхідному положенні. Утримання датчика переміщення 3 у вихідному робочому положенні досягається застосуванням пружного елемента 33, розташованого на довгих кінцях важелів 34 і 35, що також дозволяє значно скоротити час настроювання реєстратора 6 у нульовому положенні. Експериментальний зразок пристрою для визначення рухливості зубів був виготовлений в умовах інструментального виробництва ВО "Південний машинобудівельний завод" та використовується на кафедрі ортопедичної стоматології Дніпропетровської державної медичної академії. 9 65892 10 11 Комп’ютерна верстка Л. Купенко 65892 Підписне 12 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring mobility of teeth
Автори англійськоюHromov Oleh Vladyslavovych, Kosenko Kostiantyn Mykolaiovych, Albert Yevhenii Leonidovych, Tsarkov Yevhenii Oleksandrovych, Tsarkova Tetiana Oleksandrivna, Kovalenko Mykola Oleksiiovych
Назва патенту російськоюУстройство для определения подвижности зубов
Автори російськоюГромов Олег Владиславович, Косенко Константин Николаевич, Альберт Евгений Леонидович, Царьков Евгений Александрович, Царькова Татьяна Александровна, Коваленко Николай Алексеевич
МПК / Мітки
МПК: A61C 19/04
Мітки: пристрій, зубів, визначення, рухливості
Код посилання
<a href="https://ua.patents.su/6-65892-pristrijj-dlya-viznachennya-rukhlivosti-zubiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення рухливості зубів</a>
Пристрій для визначення рухливості зубів
Номер патенту: 58905
Опубліковано: 15.08.2003
Автори: Мащенко Ігор Сергійович, Громов Олег Владиславович, Захаренков Сергій Дмитрович
МПК: A61C 19/04
Мітки: зубів, рухливості, визначення, пристрій
Формула / Реферат:
Пристрій для визначення рухливості зубів, що містить блок задання навантаження, датчик переміщення зі штоком, схват і реєстратор, який відрізняється тим, що введено вузли базування окремо для нижньої і верхньої щелеп, які установлені на виносному кронштейні один над одним на 2-х півосях, при цьому піввісь вузла базування на нижній щелепі має підп'ятник зі сферичним дном, з яким взаємодіє сферична головка півосі вузла базування на верхній...
Спосіб лікування патологічної рухливості багатокореневих зубів
Номер патенту: 13194
Опубліковано: 15.03.2006
Автори: Кашанський Ігор Вікторович, Кнотько Георгій Павлович, Тригубчак Олег Юрійович, Кльомин Володимир Анатолійович, Іщенко Павло Васильович
МПК: A61C 8/00
Мітки: спосіб, патологічної, багатокореневих, зубів, рухливості, лікування
Формула / Реферат:
Спосіб лікування патологічної рухливості багатокореневих зубів, що включає виконання рентгенографічного дослідження зуба і його пародонта, розкриття порожнини зуба, його депульпування, пломбування каналів коренів, накладення тимчасової пломби, підбору імплантату відповідно до рентгенографічного знімка, зняття тимчасової пломби, трепанації альвеолярної кістки, вгвинчування імплантату в альвеолярну кістку, рентгенологічного контролю, накладення...
Спосіб лікування патологічної рухливості багатокореневих зубів
Номер патенту: 13296
Опубліковано: 15.03.2006
Автори: Кнотько Георгій Павлович, Кльомин Володимир Анатолійович, Количев Олександр Володимирович, Іщенко Павло Васильович, Кашанський Ігор Вікторович
МПК: A61C 8/00
Мітки: патологічної, багатокореневих, лікування, зубів, рухливості, спосіб
Формула / Реферат:
Спосіб лікування патологічної рухливості багатокореневих зубів шляхом виконання рентгенографічного дослідження зуба і його пародонта, розкриття порожнини зуба, його депульпування, пломбування каналів коренів, підбору імплантата відповідно до рентгенографічного знімка, накладення тимчасової пломби, зняття тимчасової пломби, трепанації альвеолярної кістки, угвинчування імплантата в альвеолярну кістку, рентгенологічного контролю, накладення...
Пристрій для визначення кислотостійкості емалі зубів
Номер патенту: 7742
Опубліковано: 15.07.2005
Автор: Удод Олександр Анатольович
МПК: A61C 19/00
Мітки: зубів, визначення, пристрій, кислотостійкості, емалі
Формула / Реферат:
Пристрій для оцінки глибини кислотного мікродефекту емалі зуба, який відрізняється тим, що містить джерело світла, світловод, фотоприймач і реєстратор ЕРС, при цьому використовують безперервний низькоінтенсивний гелієво-неоновий лазер з довжиною хвилі 0,63-0,65 мкм і потужністю випромінювання 0,8-1 мВт.
Пристрій для визначення параметрів вестибулярного розташування зубів
Номер патенту: 62835
Опубліковано: 15.12.2003
Автори: Канюра Олександр Андрійович, Бабаскин Юрій Іванович, Дорошенко Світлана Іванівна
МПК: A61C 7/00
Мітки: зубів, визначення, розташування, пристрій, вестибулярного, параметрів
Формула / Реферат:
Пристрій для визначення параметрів вестибулярного розташування зубів, який містить корпус з коловою шкалою та опорною площиною, який відрізняється тим, що містить стрілку, стопорний гвинт для її фіксації, причому центр обертання стрілки відносно корпуса співпадає з центром колової шкали, на стрілці виконано лінійну шкалу, нульова позначка якої співпадає з проекцією опорної площини корпуса на площину стрілки, а напрям зростання шкали співпадає...
Попередній патент: Спосіб оцінки ефективності хірургічної корекції стенозів сонних артерій за допомогою ультазвукового дуплексного сканування
Наступний патент: Спосіб зниження вмісту катіонів важких металів в складі осадів міських стічних вод
Випадковий патент: Система динамічного освітлення при наданні візуальної інформації