Сферичний кривошипно-повзунний механізм (варіанти)
Номер патенту: 73771
Опубліковано: 15.09.2005
Автори: Коліщук Володимир Вікторович, Травніков Євген Миколайович, Притула Михайло Михайлович
Формула / Реферат
1. Сферичний кривошипно-повзунний механізм для оборотних перетворювачів напрямку руху, у якому геометричні осі усіх установлених з можливістю обертання деталей перетинаються в одній «центральній» точці і який має корпус, вал, що встановлений у корпусі в двох протилежних співвісних підшипниках, кривошип, що жорстко зв'язаний з валом у його середній частині і оснащений кільцевим пазом, площина симетрії якого нахилена до геометричної осі вала і містить у собі згадану «центральну» точку, повзун, що кінематично зв'язаний з кільцевим пазом кривошипа, коливальну кінематичну ланку, що встановлена в корпусі в двох протилежних співвісних підшипниках так, що їх спільна геометрична вісь практично перпендикулярна спільній геометричній осі підшипників вала, і щонайменше один стрижневий проміжний елемент кінематичного зв'язку між повзуном і коливальною кінематичною ланкою, який відрізняється тим, що кільцевий паз кривошипа виконаний у вигляді щонайменше однієї першої бігової доріжки для тіл котіння, повзун виконаний на основі кільця з щонайменше однією другою біговою доріжкою для тіл котіння і кінематично зв'язаний з кільцевим пазом кривошипа через ці тіла, коливальна кінематична ланка виконана у вигляді обойми, що з безперервним зазором вільно охоплює зазначене кільце і жорстко зв'язана щонайменше з одним додатковим виступаючим за корпус валом.
2. Механізм по п. 1, який відрізняється тим, що зазначена обойма жорстко зв'язана з двома співвісними додатковими валами, які виступають за межі корпуса з його протилежних сторін.
3. Механізм по пп. 1 або 2, який відрізняється тим, що вал, який несе кривошип, оснащений щонайменше одним маховиком, що розташований поза корпусом.
4. Механізм по пп. 1 або 2, який відрізняється тим, що корпус виконаний у вигляді двох жорстко зв'язаних рамок, площини симетрії яких перпендикулярні і включають згадану «центральну» точку.
5. Сферичний кривошипно-повзунний механізм для оборотних перетворювачів напрямку руху, у якому геометричні осі усіх установлених з можливістю обертання деталей перетинаються в одній «центральній» точці і який має корпус, вал, що встановлений у корпусі в двох протилежних співвісних підшипниках, кривошип, що жорстко зв'язаний з валом у його середній частині і оснащений кільцевим пазом, площина симетрії якого нахилена до геометричної осі вала і містить у собі згадану «центральну» точку, повзун, що кінематично зв'язаний з кільцевим пазом кривошипа, коливальну кінематичну ланку, що встановлена в корпусі в двох протилежних співвісних підшипниках так, що їх спільна геометрична вісь практично перпендикулярна спільній геометричній осі підшипників вала, і щонайменше один стрижневий проміжний елемент кінематичного зв'язку між повзуном і коливальною кінематичною ланкою, який відрізняється тим, що кривошип виконаний рознімним, у кільцевому пазу кривошипа жорстко закріплене цілісне кільце з щонайменше однією біговою доріжкою, що служить внутрішнім кільцем підшипника котіння, повзун виконаний на основі такого зовнішнього кільця зазначеного підшипника котіння, яке має однакову із зазначеним внутрішнім кільцем кількість бігових доріжок і спирається на внутрішнє кільце через придатні тіла котіння, а коливальна кінематична ланка виконана у вигляді обойми, що з безперервним зазором вільно охоплює повзун і жорстко зв'язана щонайменше з одним додатковим виступаючим за корпус валом.
6. Механізм по п. 5, який відрізняється тим, що зазначена обойма жорстко зв'язана з двома співвісними додатковими валами, які виступають за межі корпуса з його протилежних сторін.
7. Механізм по пп. 5 або 6, який відрізняється тим, що вал, який несе кривошип, оснащений щонайменше одним маховиком, що розташований поза корпусом.
8. Механізм по пп. 5 або п. 6, який відрізняється тим, що корпус виконаний у вигляді двох жорстко зв'язаних рамок, площини симетрії яких перпендикулярні і включають згадану «центральну» точку.
Текст
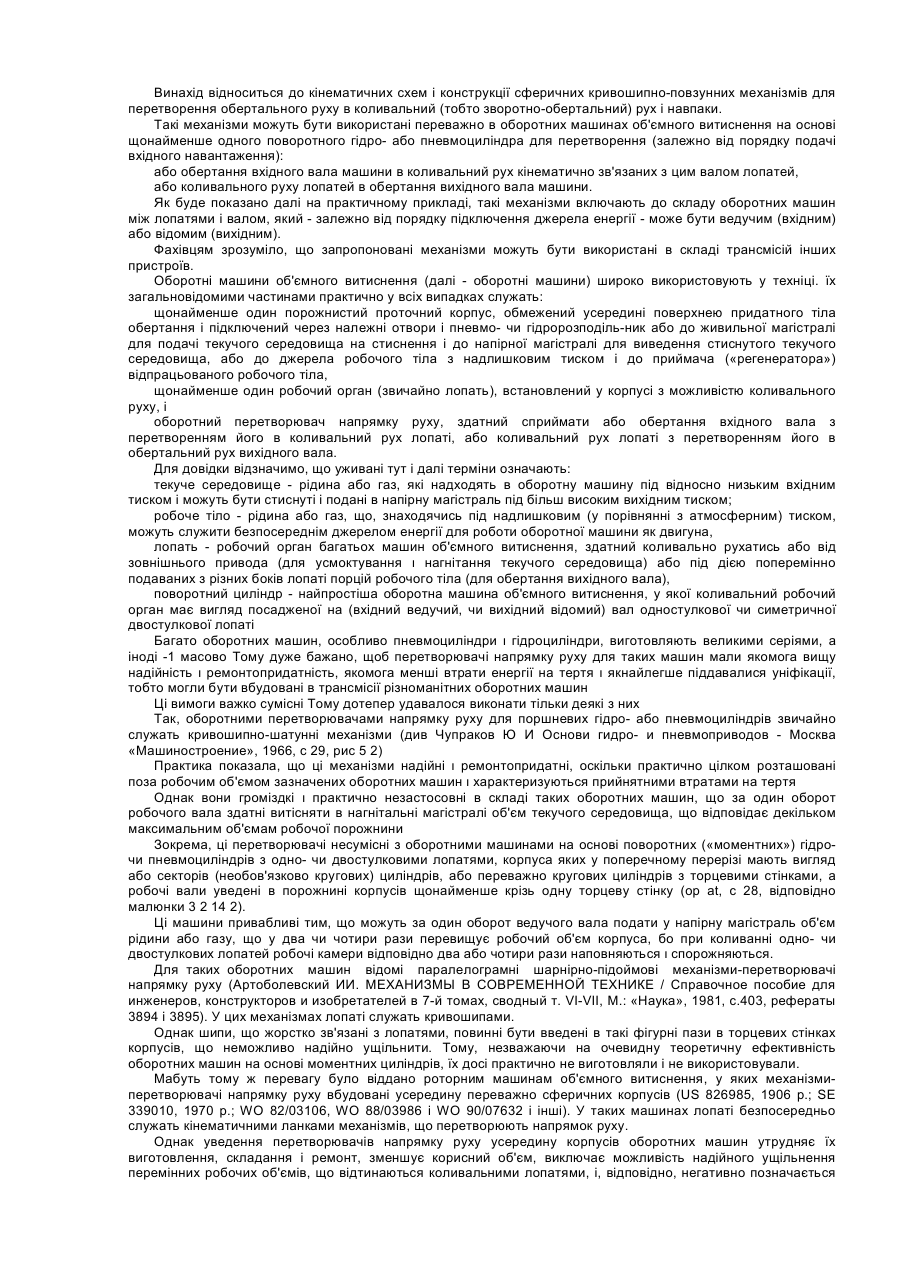
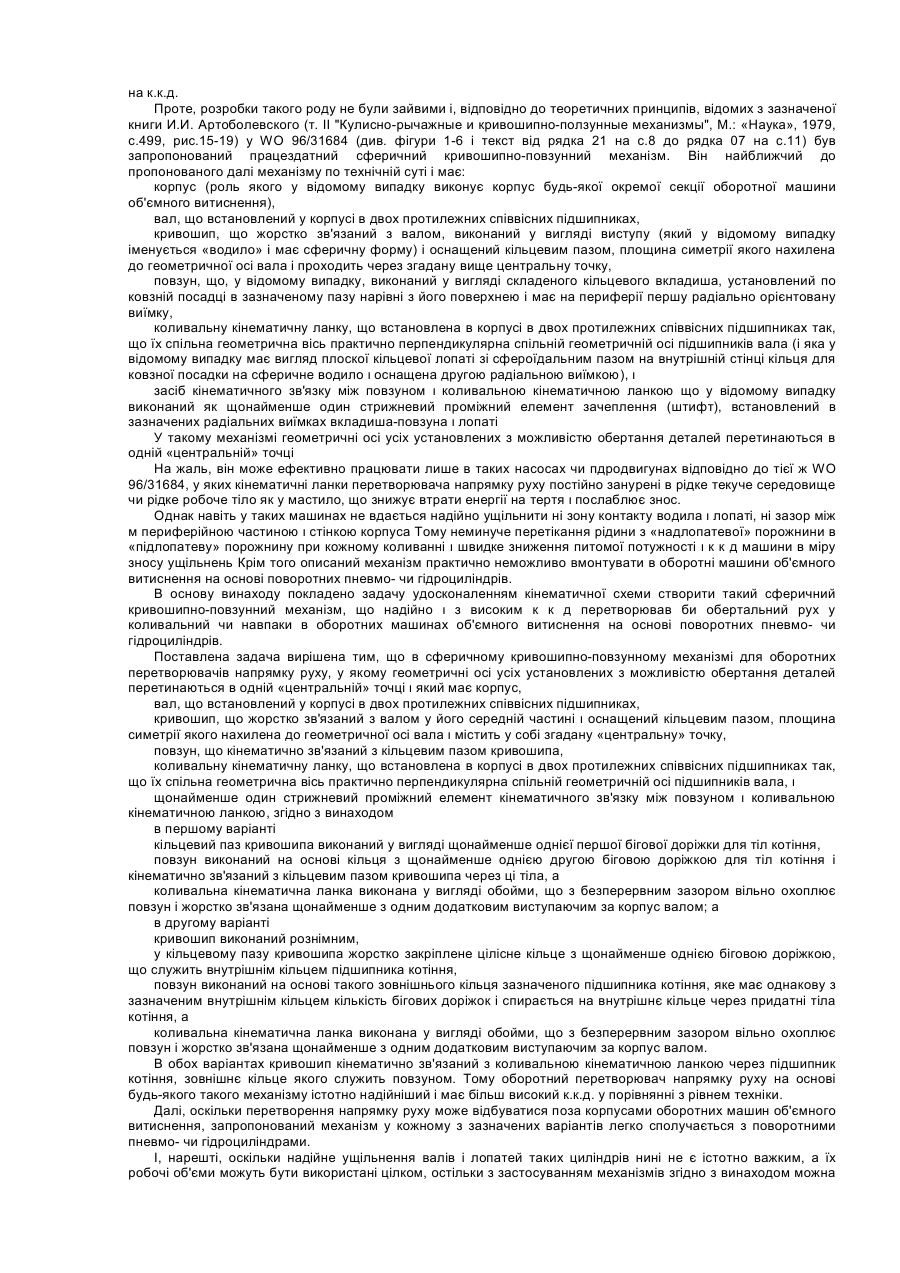
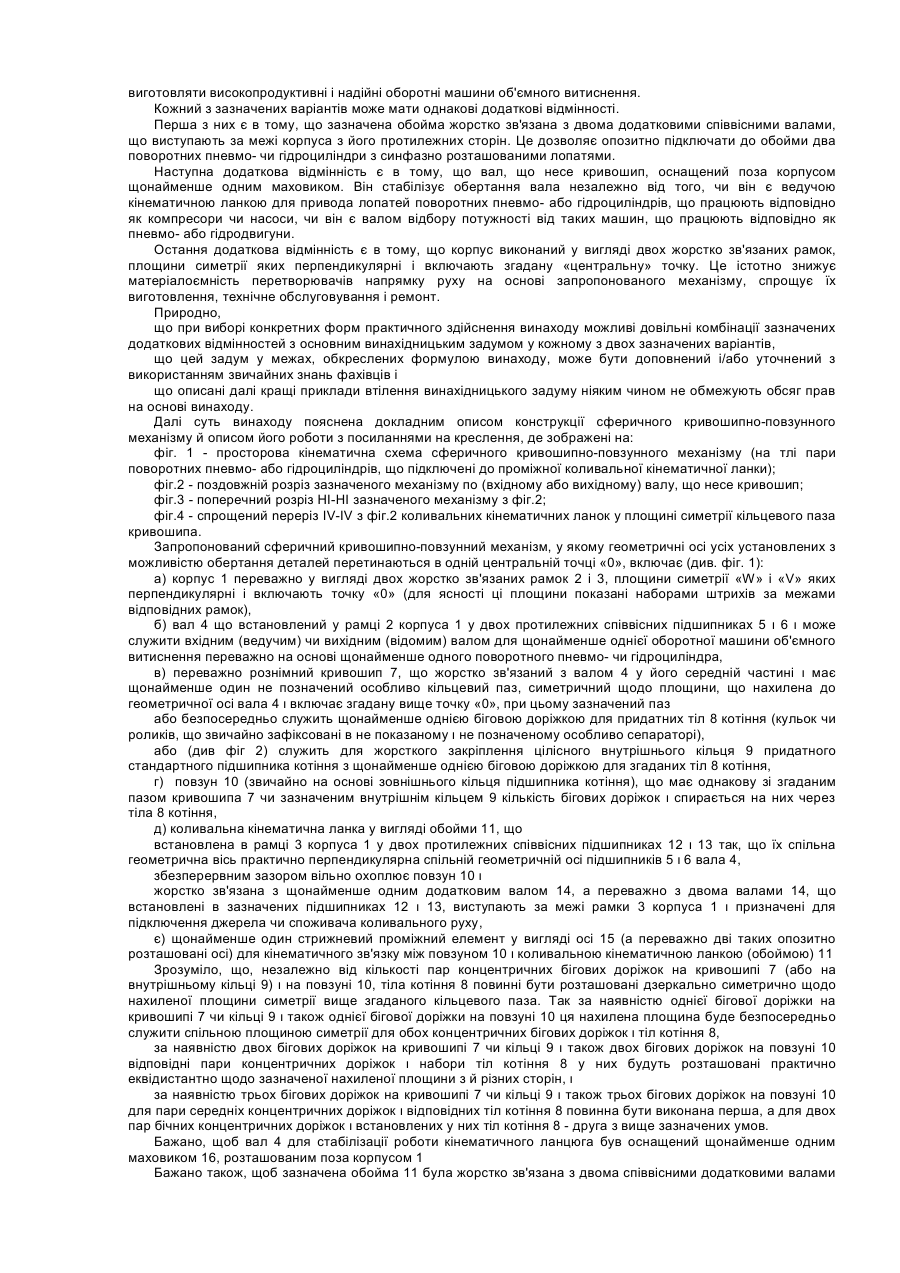
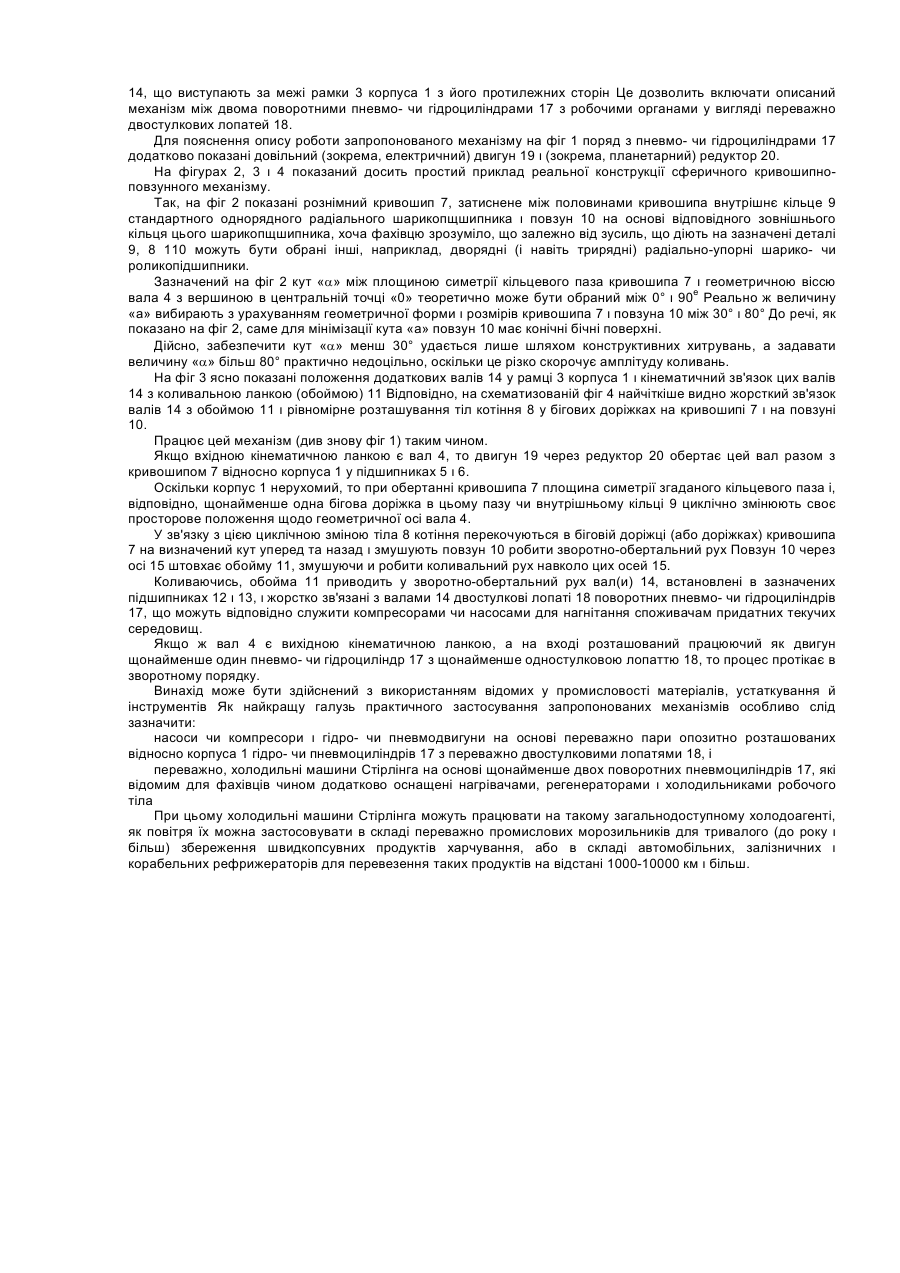
Винахід відноситься до кінематичних схем і конструкції сферичних кривошипно-повзунних механізмів для перетворення обертального руху в коливальний (тобто зворотно-обертальний) рух і навпаки. Такі механізми можуть бути використані переважно в оборотних машинах об'ємного витиснення на основі щонайменше одного поворотного гідро- або пневмоциліндра для перетворення (залежно від порядку подачі вхідного навантаження): або обертання вхідного вала машини в коливальний рух кінематично зв'язаних з цим валом лопатей, або коливального руху лопатей в обертання вихідного вала машини. Як буде показано далі на практичному прикладі, такі механізми включають до складу оборотних машин між лопатями і валом, який - залежно від порядку підключення джерела енергії - може бути ведучим (вхідним) або відомим (вихідним). Фахівцям зрозуміло, що запропоновані механізми можуть бути використані в складі трансмісій інших пристроїв. Оборотні машини об'ємного витиснення (далі - оборотні машини) широко використовують у техніці. їх загальновідомими частинами практично у всіх випадках служать: щонайменше один порожнистий проточний корпус, обмежений усередині поверхнею придатного тіла обертання і підключений через належні отвори і пневмо- чи гідророзподіль-ник або до живильної магістралі для подачі текучого середовища на стиснення і до напірної магістралі для виведення стиснутого текучого середовища, або до джерела робочого тіла з надлишковим тиском і до приймача («регенератора») відпрацьованого робочого тіла, щонайменше один робочий орган (звичайно лопать), встановлений у корпусі з можливістю коливального руху, і оборотний перетворювач напрямку руху, здатний сприймати або обертання вхідного вала з перетворенням його в коливальний рух лопаті, або коливальний рух лопаті з перетворенням його в обертальний рух вихідного вала. Для довідки відзначимо, що уживані тут і далі терміни означають: текуче середовище - рідина або газ, які надходять в оборотну машину під відносно низьким вхідним тиском і можуть бути стиснуті і подані в напірну магістраль під більш високим вихідним тиском; робоче тіло - рідина або газ, що, знаходячись під надлишковим (у порівнянні з атмосферним) тиском, можуть служити безпосереднім джерелом енергії для роботи оборотної машини як двигуна, лопать - робочий орган багатьох машин об'ємного витиснення, здатний коливально рухатись або від зовнішнього привода (для усмоктування ι нагнітання текучого середовища) або під дією поперемінно подаваних з різних боків лопаті порцій робочого тіла (для обертання вихідного вала), поворотний циліндр - найпростіша оборотна машина об'ємного витиснення, у якої коливальний робочий орган має вигляд посадженої на (вхідний ведучий, чи вихідний відомий) вал одностулкової чи симетричної двостулкової лопаті Багато оборотних машин, особливо пневмоциліндри ι гідроциліндри, виготовляють великими серіями, а іноді -1 масово Тому дуже бажано, щоб перетворювачі напрямку руху для таких машин мали якомога вищу надійність ι ремонтопридатність, якомога менші втрати енергії на тертя ι якнайлегше піддавалися уніфікації, тобто могли бути вбудовані в трансмісії різноманітних оборотних машин Ці вимоги важко сумісні Тому дотепер удавалося виконати тільки деякі з них Так, оборотними перетворювачами напрямку руху для поршневих гідро- або пневмоциліндрів звичайно служать кривошипно-шатунні механізми (див Чупраков Ю И Основи гидро- и пневмоприводов - Москва «Машиностроение», 1966, с 29, рис 5 2) Практика показала, що ці механізми надійні ι ремонтопридатні, оскільки практично цілком розташовані поза робочим об'ємом зазначених оборотних машин ι характеризуються прийнятними втратами на тертя Однак вони громіздкі ι практично незастосовні в складі таких оборотних машин, що за один оборот робочого вала здатні витісняти в нагнітальні магістралі об'єм текучого середовища, що відповідає декільком максимальним об'ємам робочої порожнини Зокрема, ці перетворювачі несумісні з оборотними машинами на основі поворотних («моментних») гідрочи пневмоциліндрів з одно- чи двостулковими лопатями, корпуса яких у поперечному перерізі мають вигляд або секторів (необов'язково кругових) циліндрів, або переважно кругових циліндрів з торцевими стінками, а робочі вали уведені в порожнині корпусів щонайменше крізь одну торцеву стінку (op at, с 28, відповідно малюнки 3 2 14 2). Ці машини привабливі тим, що можуть за один оборот ведучого вала подати у напірну магістраль об'єм рідини або газу, що у два чи чотири рази перевищує робочий об'єм корпуса, бо при коливанні одно- чи двостулкових лопатей робочі камери відповідно два або чотири рази наповняються ι спорожняються. Для таких оборотних машин відомі паралелограмні шарнірно-підоймові механізми-перетворювачі напрямку руху (Артоболевский ИИ. МЕХАНИЗМЫ В СОВРЕМЕННОЙ ТЕХНИКЕ / Справочное пособие для инженеров, конструкторов и изобретателей в 7-й томах, сводный т. VI-VII, М.: «Наука», 1981, с.403, рефераты 3894 і 3895). У цих механізмах лопаті служать кривошипами. Однак шипи, що жорстко зв'язані з лопатями, повинні бути введені в такі фігурні пази в торцевих стінках корпусів, що неможливо надійно ущільнити. Тому, незважаючи на очевидну теоретичну ефективність оборотних машин на основі моментних циліндрів, їх досі практично не виготовляли і не використовували. Мабуть тому ж перевагу було віддано роторним машинам об'ємного витиснення, у яких механізмиперетворювачі напрямку руху вбудовані усередину переважно сферичних корпусів (US 826985, 1906 p.; SE 339010, 1970 p.; WO 82/03106, WO 88/03986 і WO 90/07632 і інші). У таких машинах лопаті безпосередньо служать кінематичними ланками механізмів, що перетворюють напрямок руху. Однак уведення перетворювачів напрямку руху усередину корпусів оборотних машин утрудняє їх виготовлення, складання і ремонт, зменшує корисний об'єм, виключає можливість надійного ущільнення перемінних робочих об'ємів, що відтинаються коливальними лопатями, і, відповідно, негативно позначається на к.к.д. Проте, розробки такого роду не були зайвими і, відповідно до теоретичних принципів, відомих з зазначеної книги И.И. Артоболевского (т. II "Кулисно-рычажные и кривошипно-ползунные механизмы", М.: «Наука», 1979, с.499, рис.15-19) у WO 96/31684 (див. фігури 1-6 і текст від рядка 21 на с.8 до рядка 07 на с.11) був запропонований працездатний сферичний кривошипно-повзунний механізм. Він найближчий до пропонованого далі механізму по технічній суті і має: корпус (роль якого у відомому випадку виконує корпус будь-якої окремої секції оборотної машини об'ємного витиснення), вал, що встановлений у корпусі в двох протилежних співвісних підшипниках, кривошип, що жорстко зв'язаний з валом, виконаний у вигляді виступу (який у відомому випадку іменується «водило» і має сферичну форму) і оснащений кільцевим пазом, площина симетрії якого нахилена до геометричної осі вала і проходить через згадану вище центральну точку, повзун, що, у відомому випадку, виконаний у вигляді складеного кільцевого вкладиша, установлений по ковзній посадці в зазначеному пазу нарівні з його поверхнею і має на периферії першу радіально орієнтовану виїмку, коливальну кінематичну ланку, що встановлена в корпусі в двох протилежних співвісних підшипниках так, що їх спільна геометрична вісь практично перпендикулярна спільній геометричній осі підшипників вала (і яка у відомому випадку має вигляд плоскої кільцевої лопаті зі сфероїдальним пазом на внутрішній стінці кільця для ковзної посадки на сферичне водило ι оснащена другою радіальною виїмкою), ι засіб кінематичного зв'язку між повзуном ι коливальною кінематичною ланкою що у відомому випадку виконаний як щонайменше один стрижневий проміжний елемент зачеплення (штифт), встановлений в зазначених радіальних виїмках вкладиша-повзуна ι лопаті У такому механізмі геометричні осі усіх установлених з можливістю обертання деталей перетинаються в одній «центральній» точці На жаль, він може ефективно працювати лише в таких насосах чи пдродвигунах відповідно до тієї ж WO 96/31684, у яких кінематичні ланки перетворювача напрямку руху постійно занурені в рідке текуче середовище чи рідке робоче тіло як у мастило, що знижує втрати енергії на тертя ι послаблює знос. Однак навіть у таких машинах не вдається надійно ущільнити ні зону контакту водила ι лопаті, ні зазор між м периферійною частиною ι стінкою корпуса Тому неминуче перетікання рідини з «надлопатевої» порожнини в «підлопатеву» порожнину при кожному коливанні ι швидке зниження питомої потужності ι к к д машини в міру зносу ущільнень Крім того описаний механізм практично неможливо вмонтувати в оборотні машини об'ємного витиснення на основі поворотних пневмо- чи гідроциліндрів. В основу винаходу покладено задачу удосконаленням кінематичної схеми створити такий сферичний кривошипно-повзунний механізм, що надійно ι з високим к к д перетворював би обертальний рух у коливальний чи навпаки в оборотних машинах об'ємного витиснення на основі поворотних пневмо- чи гідроциліндрів. Поставлена задача вирішена тим, що в сферичному кривошипно-повзунному механізмі для оборотних перетворювачів напрямку руху, у якому геометричні осі усіх установлених з можливістю обертання деталей перетинаються в одній «центральній» точці ι який має корпус, вал, що встановлений у корпусі в двох протилежних співвісних підшипниках, кривошип, що жорстко зв'язаний з валом у його середній частині ι оснащений кільцевим пазом, площина симетрії якого нахилена до геометричної осі вала ι містить у собі згадану «центральну» точку, повзун, що кінематично зв'язаний з кільцевим пазом кривошипа, коливальну кінематичну ланку, що встановлена в корпусі в двох протилежних співвісних підшипниках так, що їх спільна геометрична вісь практично перпендикулярна спільній геометричній осі підшипників вала, ι щонайменше один стрижневий проміжний елемент кінематичного зв'язку між повзуном ι коливальною кінематичною ланкою, згідно з винаходом в першому варіанті кільцевий паз кривошипа виконаний у вигляді щонайменше однієї першої бігової доріжки для тіл котіння, повзун виконаний на основі кільця з щонайменше однією другою біговою доріжкою для тіл котіння і кінематично зв'язаний з кільцевим пазом кривошипа через ці тіла, а коливальна кінематична ланка виконана у вигляді обойми, що з безперервним зазором вільно охоплює повзун і жорстко зв'язана щонайменше з одним додатковим виступаючим за корпус валом; а в другому варіанті кривошип виконаний рознімним, у кільцевому пазу кривошипа жорстко закріплене цілісне кільце з щонайменше однією біговою доріжкою, що служить внутрішнім кільцем підшипника котіння, повзун виконаний на основі такого зовнішнього кільця зазначеного підшипника котіння, яке має однакову з зазначеним внутрішнім кільцем кількість бігових доріжок і спирається на внутрішнє кільце через придатні тіла котіння, а коливальна кінематична ланка виконана у вигляді обойми, що з безперервним зазором вільно охоплює повзун і жорстко зв'язана щонайменше з одним додатковим виступаючим за корпус валом. В обох варіантах кривошип кінематично зв'язаний з коливальною кінематичною ланкою через підшипник котіння, зовнішнє кільце якого служить повзуном. Тому оборотний перетворювач напрямку руху на основі будь-якого такого механізму істотно надійніший і має більш високий к.к.д. у порівнянні з рівнем техніки. Далі, оскільки перетворення напрямку руху може відбуватися поза корпусами оборотних машин об'ємного витиснення, запропонований механізм у кожному з зазначених варіантів легко сполучається з поворотними пневмо- чи гідроциліндрами. І, нарешті, оскільки надійне ущільнення валів і лопатей таких циліндрів нині не є істотно важким, а їх робочі об'єми можуть бути використані цілком, остільки з застосуванням механізмів згідно з винаходом можна виготовляти високопродуктивні і надійні оборотні машини об'ємного витиснення. Кожний з зазначених варіантів може мати однакові додаткові відмінності. Перша з них є в тому, що зазначена обойма жорстко зв'язана з двома додатковими співвісними валами, що виступають за межі корпуса з його протилежних сторін. Це дозволяє опозитно підключати до обойми два поворотних пневмо- чи гідроциліндри з синфазно розташованими лопатями. Наступна додаткова відмінність є в тому, що вал, що несе кривошип, оснащений поза корпусом щонайменше одним маховиком. Він стабілізує обертання вала незалежно від того, чи він є ведучою кінематичною ланкою для привода лопатей поворотних пневмо- або гідроциліндрів, що працюють відповідно як компресори чи насоси, чи він є валом відбору потужності від таких машин, що працюють відповідно як пневмо- або гідродвигуни. Остання додаткова відмінність є в тому, що корпус виконаний у вигляді двох жорстко зв'язаних рамок, площини симетрії яких перпендикулярні і включають згадану «центральну» точку. Це істотно знижує матеріалоємність перетворювачів напрямку руху на основі запропонованого механізму, спрощує їх виготовлення, технічне обслуговування і ремонт. Природно, що при виборі конкретних форм практичного здійснення винаходу можливі довільні комбінації зазначених додаткових відмінностей з основним винахідницьким задумом у кожному з двох зазначених варіантів, що цей задум у межах, обкреслених формулою винаходу, може бути доповнений і/або уточнений з використанням звичайних знань фахівців і що описані далі кращі приклади втілення винахідницького задуму ніяким чином не обмежують обсяг прав на основі винаходу. Далі суть винаходу пояснена докладним описом конструкції сферичного кривошипно-повзунного механізму й описом його роботи з посиланнями на креслення, де зображені на: фіг. 1 - просторова кінематична схема сферичного кривошипно-повзунного механізму (на тлі пари поворотних пневмо- або гідроциліндрів, що підключені до проміжної коливальної кінематичної ланки); фіг.2 - поздовжній розріз зазначеного механізму по (вхідному або вихідному) валу, що несе кривошип; фіг.3 - поперечний розріз НІ-НІ зазначеного механізму з фіг.2; фіг.4 - спрощений nepeріз IV-IV з фіг.2 коливальних кінематичних ланок у площині симетрії кільцевого паза кривошипа. Запропонований сферичний кривошипно-повзунний механізм, у якому геометричні осі усіх установлених з можливістю обертання деталей перетинаються в одній центральній точці «0», включає (див. фіг. 1): а) корпус 1 переважно у вигляді двох жорстко зв'язаних рамок 2 і 3, площини симетрії «W» і «V» яких перпендикулярні і включають точку «0» (для ясності ці площини показані наборами штрихів за межами відповідних рамок), б) вал 4 що встановлений у рамці 2 корпуса 1 у двох протилежних співвісних підшипниках 5 ι 6 ι може служити вхідним (ведучим) чи вихідним (відомим) валом для щонайменше однієї оборотної машини об'ємного витиснення переважно на основі щонайменше одного поворотного пневмо- чи гідроциліндра, в) переважно рознімний кривошип 7, що жорстко зв'язаний з валом 4 у його середній частині ι має щонайменше один не позначений особливо кільцевий паз, симетричний щодо площини, що нахилена до геометричної осі вала 4 ι включає згадану вище точку «0», при цьому зазначений паз або безпосередньо служить щонайменше однією біговою доріжкою для придатних тіл 8 котіння (кульок чи роликів, що звичайно зафіксовані в не показаному ι не позначеному особливо сепараторі), або (див фіг 2) служить для жорсткого закріплення цілісного внутрішнього кільця 9 придатного стандартного підшипника котіння з щонайменше однією біговою доріжкою для згаданих тіл 8 котіння, г) повзун 10 (звичайно на основі зовнішнього кільця підшипника котіння), що має однакову зі згаданим пазом кривошипа 7 чи зазначеним внутрішнім кільцем 9 кількість бігових доріжок ι спирається на них через тіла 8 котіння, д) коливальна кінематична ланка у вигляді обойми 11, що встановлена в рамці 3 корпуса 1 у двох протилежних співвісних підшипниках 12 ι 13 так, що їх спільна геометрична вісь практично перпендикулярна спільній геометричній осі підшипників 5 ι 6 вала 4, збезперервним зазором вільно охоплює повзун 10 ι жорстко зв'язана з щонайменше одним додатковим валом 14, а переважно з двома валами 14, що встановлені в зазначених підшипниках 12 ι 13, виступають за межі рамки 3 корпуса 1 ι призначені для підключення джерела чи споживача коливального руху, є) щонайменше один стрижневий проміжний елемент у вигляді осі 15 (а переважно дві таких опозитно розташовані осі) для кінематичного зв'язку між повзуном 10 ι коливальною кінематичною ланкою (обоймою) 11 Зрозуміло, що, незалежно від кількості пар концентричних бігових доріжок на кривошипі 7 (або на внутрішньому кільці 9) ι на повзуні 10, тіла котіння 8 повинні бути розташовані дзеркально симетрично щодо нахиленої площини симетрії вище згаданого кільцевого паза. Так за наявністю однієї бігової доріжки на кривошипі 7 чи кільці 9 ι також однієї бігової доріжки на повзуні 10 ця нахилена площина буде безпосередньо служити спільною площиною симетрії для обох концентричних бігових доріжок ι тіл котіння 8, за наявністю двох бігових доріжок на кривошипі 7 чи кільці 9 ι також двох бігових доріжок на повзуні 10 відповідні пари концентричних доріжок ι набори тіл котіння 8 у них будуть розташовані практично еквідистантно щодо зазначеної нахиленої площини з й різних сторін, ι за наявністю трьох бігових доріжок на кривошипі 7 чи кільці 9 ι також трьох бігових доріжок на повзуні 10 для пари середніх концентричних доріжок ι відповідних тіл котіння 8 повинна бути виконана перша, а для двох пар бічних концентричних доріжок ι встановлених у них тіл котіння 8 - друга з вище зазначених умов. Бажано, щоб вал 4 для стабілізації роботи кінематичного ланцюга був оснащений щонайменше одним маховиком 16, розташованим поза корпусом 1 Бажано також, щоб зазначена обойма 11 була жорстко зв'язана з двома співвісними додатковими валами 14, що виступають за межі рамки 3 корпуса 1 з його протилежних сторін Це дозволить включати описаний механізм між двома поворотними пневмо- чи гідроциліндрами 17 з робочими органами у вигляді переважно двостулкових лопатей 18. Для пояснення опису роботи запропонованого механізму на фіг 1 поряд з пневмо- чи гідроциліндрами 17 додатково показані довільний (зокрема, електричний) двигун 19 ι (зокрема, планетарний) редуктор 20. На фігурах 2, 3 ι 4 показаний досить простий приклад реальної конструкції сферичного кривошипноповзунного механізму. Так, на фіг 2 показані рознімний кривошип 7, затиснене між половинами кривошипа внутрішнє кільце 9 стандартного однорядного радіального шарикопщшипника ι повзун 10 на основі відповідного зовнішнього кільця цього шарикопщшипника, хоча фахівцю зрозуміло, що залежно від зусиль, що діють на зазначені деталі 9, 8 110 можуть бути обрані інші, наприклад, дворядні (і навіть трирядні) радіально-упорні шарико- чи роликопідшипники. Зазначений на фіг 2 кут «a» між площиною симетрії кільцевого паза кривошипа 7 ι геометричною віссю вала 4 з вершиною в центральній точці «0» теоретично може бути обраний між 0° ι 90е Реально ж величину «а» вибирають з урахуванням геометричної форми ι розмірів кривошипа 7 ι повзуна 10 між 30° ι 80° До речі, як показано на фіг 2, саме для мінімізації кута «а» повзун 10 має конічні бічні поверхні. Дійсно, забезпечити кут «a» менш 30° удається лише шляхом конструктивних хитрувань, а задавати величину «a» більш 80° практично недоцільно, оскільки це різко скорочує амплітуду коливань. На фіг 3 ясно показані положення додаткових валів 14 у рамці 3 корпуса 1 ι кінематичний зв'язок цих валів 14 з коливальною ланкою (обоймою) 11 Відповідно, на схематизованій фіг 4 найчіткіше видно жорсткий зв'язок валів 14 з обоймою 11 ι рівномірне розташування тіл котіння 8 у бігових доріжках на кривошипі 7 ι на повзуні 10. Працює цей механізм (див знову фіг 1) таким чином. Якщо вхідною кінематичною ланкою є вал 4, то двигун 19 через редуктор 20 обертає цей вал разом з кривошипом 7 відносно корпуса 1 у підшипниках 5 ι 6. Оскільки корпус 1 нерухомий, то при обертанні кривошипа 7 площина симетрії згаданого кільцевого паза і, відповідно, щонайменше одна бігова доріжка в цьому пазу чи внутрішньому кільці 9 циклічно змінюють своє просторове положення щодо геометричної осі вала 4. У зв'язку з цією циклічною зміною тіла 8 котіння перекочуються в біговій доріжці (або доріжках) кривошипа 7 на визначений кут уперед та назад ι змушують повзун 10 робити зворотно-обертальний рух Повзун 10 через осі 15 штовхає обойму 11, змушуючи и робити коливальний рух навколо цих осей 15. Коливаючись, обойма 11 приводить у зворотно-обертальний рух вал(и) 14, встановлені в зазначених підшипниках 12 ι 13, ι жорстко зв'язані з валами 14 двостулкові лопаті 18 поворотних пневмо- чи гідроциліндрів 17, що можуть відповідно служити компресорами чи насосами для нагнітання споживачам придатних текучих середовищ. Якщо ж вал 4 є вихідною кінематичною ланкою, а на вході розташований працюючий як двигун щонайменше один пневмо- чи гідроциліндр 17 з щонайменше одностулковою лопаттю 18, то процес протікає в зворотному порядку. Винахід може бути здійснений з використанням відомих у промисловості матеріалів, устаткування й інструментів Як найкращу галузь практичного застосування запропонованих механізмів особливо слід зазначити: насоси чи компресори ι гідро- чи пневмодвигуни на основі переважно пари опозитно розташованих відносно корпуса 1 гідро- чи пневмоциліндрів 17 з переважно двостулковими лопатями 18, і переважно, холодильні машини Стірлінга на основі щонайменше двох поворотних пневмоциліндрів 17, які відомим для фахівців чином додатково оснащені нагрівачами, регенераторами ι холодильниками робочого тіла При цьому холодильні машини Стірлінга можуть працювати на такому загальнодоступному холодоагенті, як повітря їх можна застосовувати в складі переважно промислових морозильників для тривалого (до року ι більш) збереження швидкопсувних продуктів харчування, або в складі автомобільних, залізничних ι корабельних рефрижераторів для перевезення таких продуктів на відстані 1000-10000 км ι більш.
ДивитисяДодаткова інформація
Назва патенту англійськоюSpherical crank-slide mechanism (versions)
Назва патенту російськоюСферический кривошипно-ползунковый механизм (варианты)
МПК / Мітки
Мітки: варіанти, механізм, сферичний, кривошипно-повзунний
Код посилання
<a href="https://ua.patents.su/6-73771-sferichnijj-krivoshipno-povzunnijj-mekhanizm-varianti.html" target="_blank" rel="follow" title="База патентів України">Сферичний кривошипно-повзунний механізм (варіанти)</a>
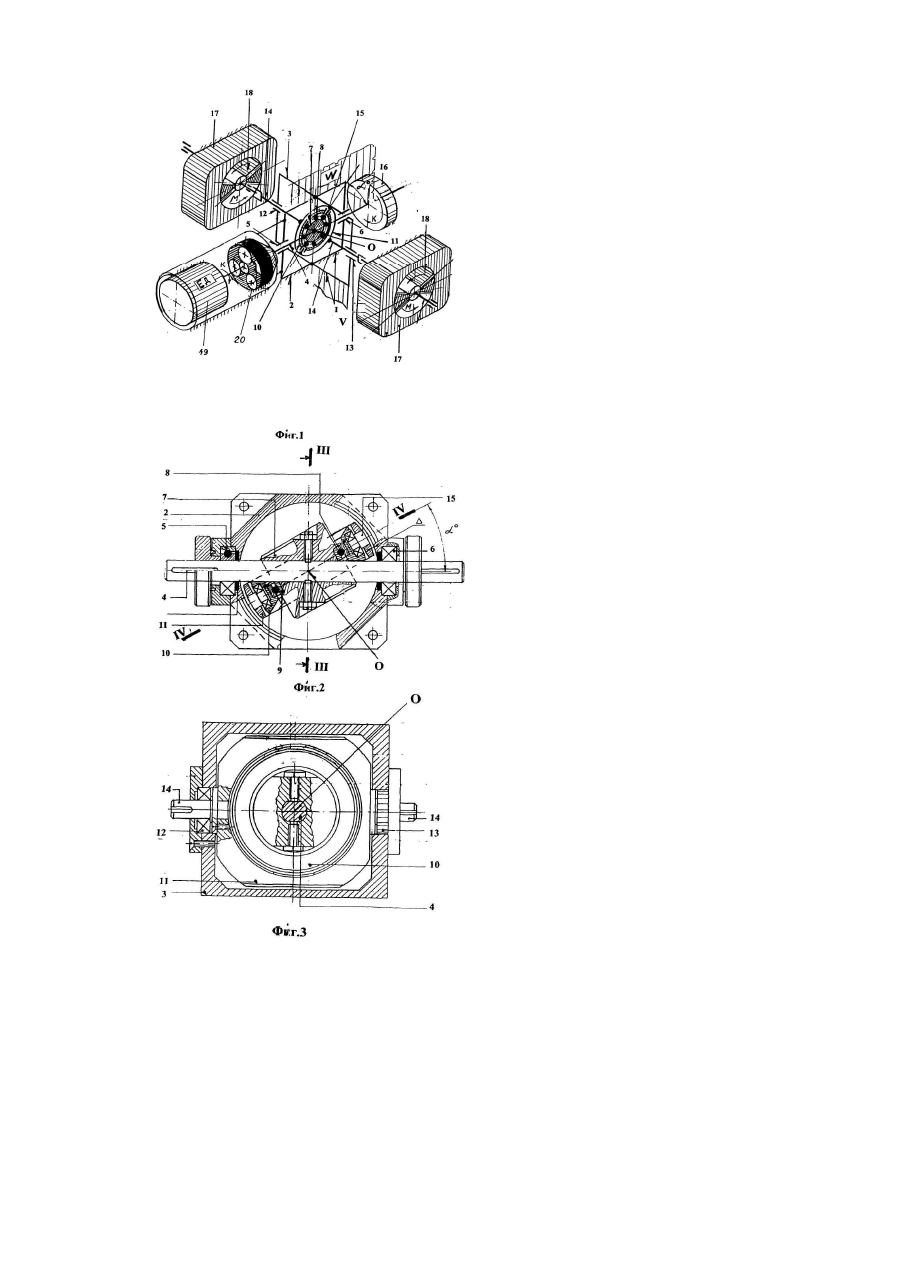
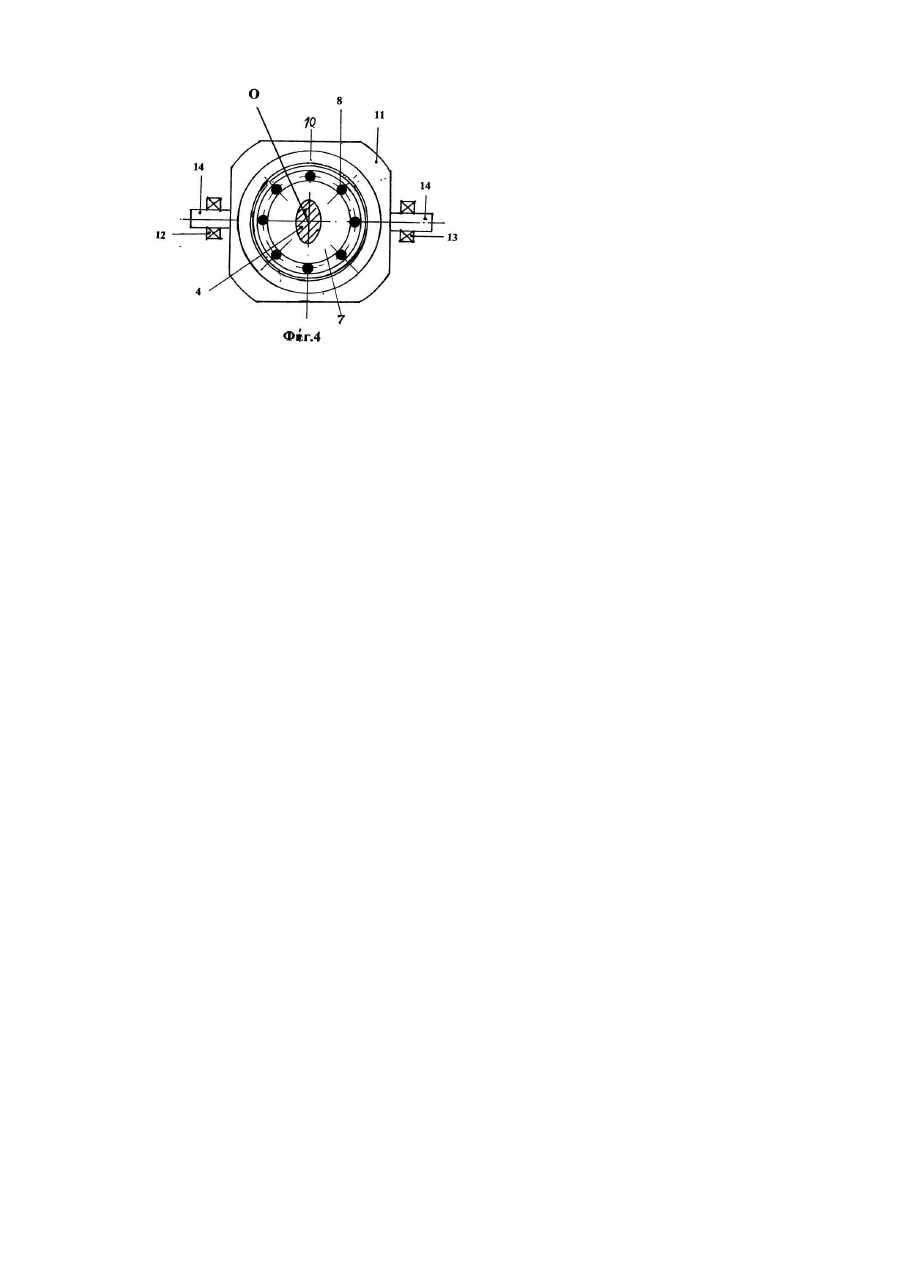
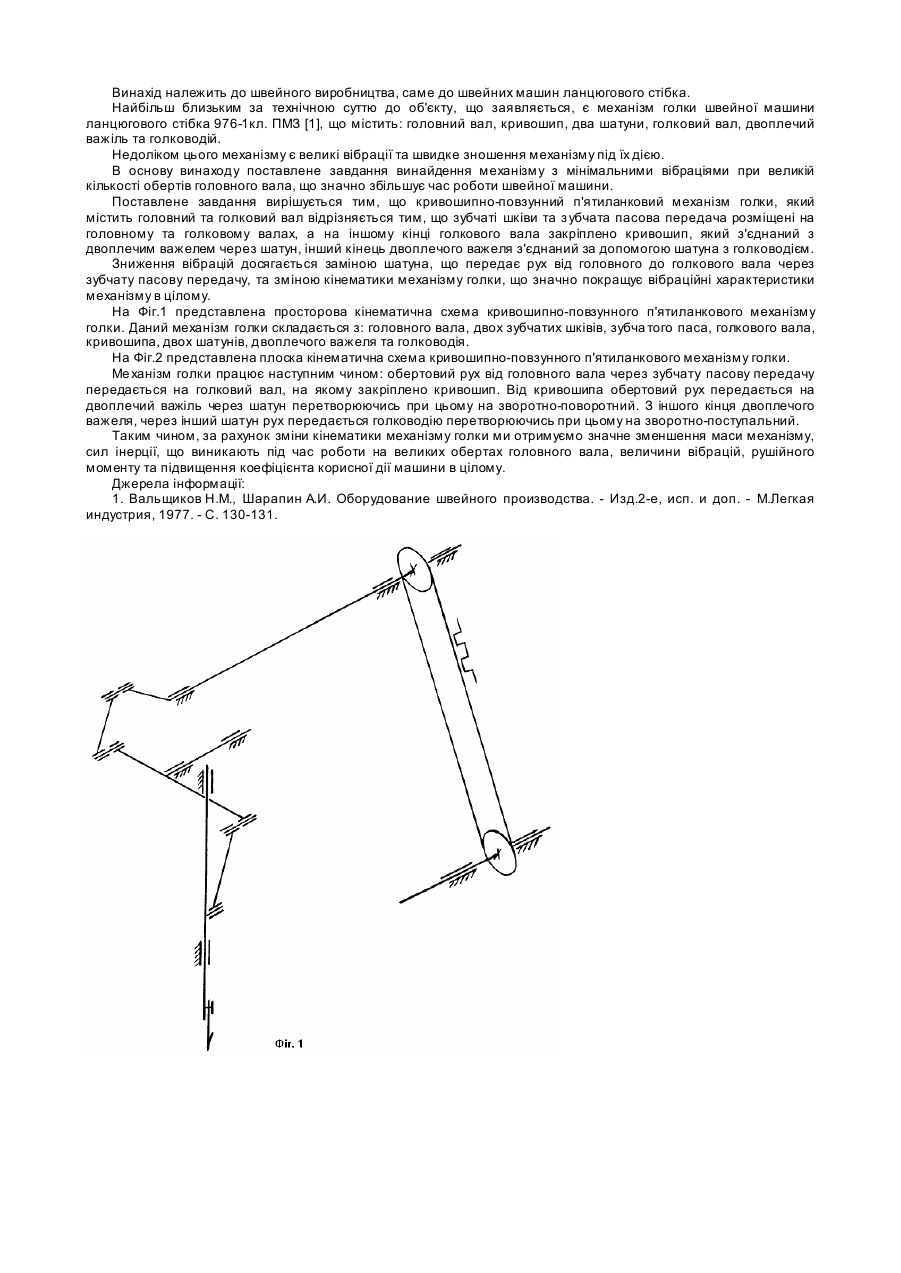
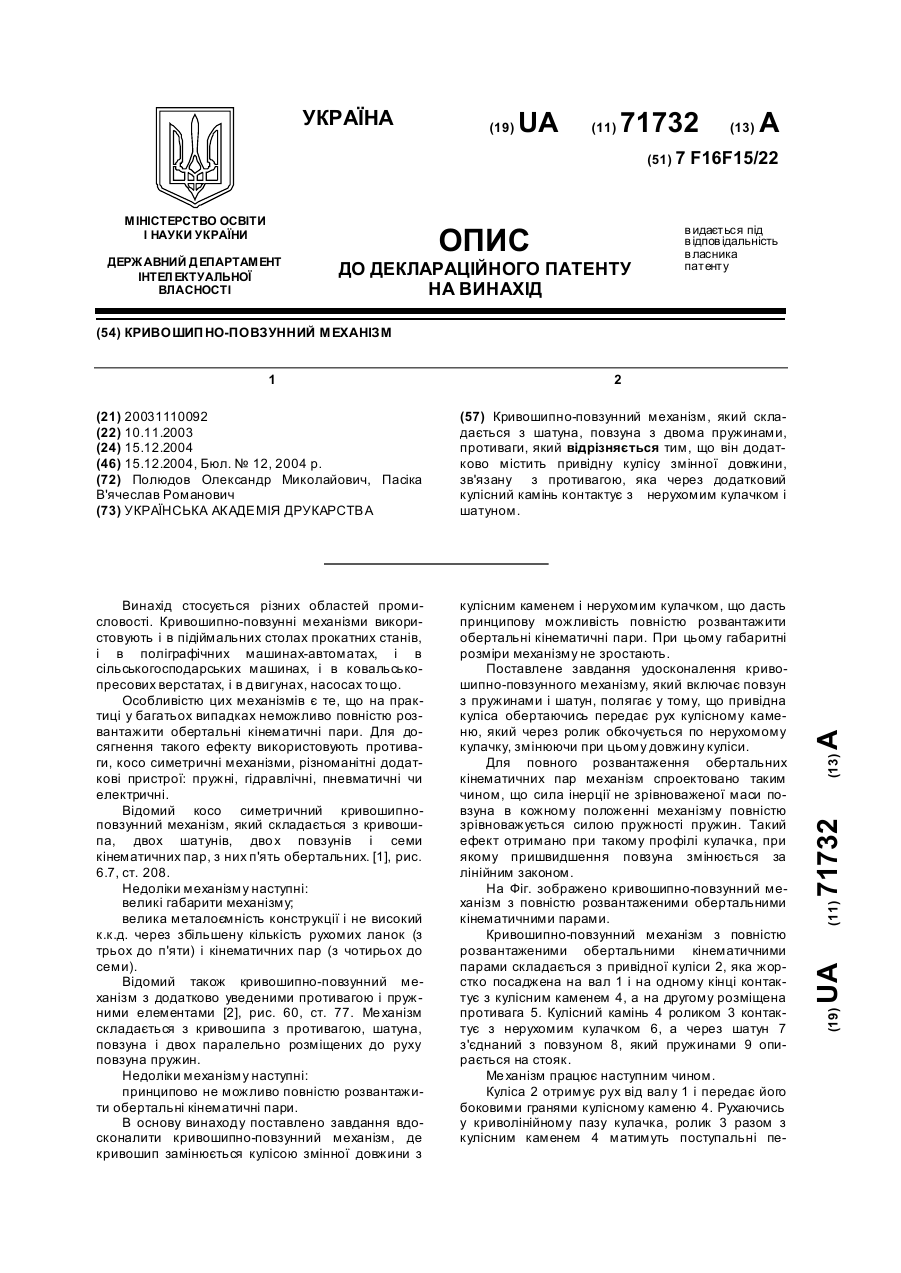
Кривошипно-повзунний п’ятиланковий механізм голки
Номер патенту: 68981
Опубліковано: 16.08.2004
Автори: Шевченко Ігор Аркадійович, Терещенко Олександр Пилипович, Капустенський Петро Гнатович
МПК: D05B 1/00
Мітки: кривошипно-повзунний, механізм, п'ятиланковий, голки
Формула / Реферат:
Кривошипно-повзунний п‘ятиланковий механізм голки, який містить головний та голковий вал, який відрізняється тим, що зубчаті шківи та зубчата пасова передача розміщені на головному та голковому валах, а на іншому кінці голкового вала закріплено кривошип, який з'єднаний з двоплечим важелем через шатун, інший кінець двоплечого важеля з'єднаний за допомогою шатуна з голководієм.
Кривошипно-повзунний механізм молота з пружною ланкою

Номер патенту: 54723
Опубліковано: 17.03.2003
Автори: Роганов Лев Леонідович, Кравченко Руслан Анатолійович
МПК: B21J 7/00
Мітки: молота, ланкою, пружною, кривошипно-повзунний, механізм
Формула / Реферат:
Кривошипно-повзунний механізм молота з пружною ланкою, що містить кривошип, шатун у вигляді пружної ресори і бойок, що здійснює коливальний рух у вертикальній площині, який відрізняється тим, що для отримання безшаботної схеми механізм додатково має шатун, виконаний у вигляді пружної ресори і обидва шатуни здійснюють коливальний рух під впливом тяг, що коливаються, причому величина ходу падаючих частин регулюється за рахунок зміни...
Кривошипно-повзунний механізм
Номер патенту: 71732
Опубліковано: 15.12.2004
Автори: Пасіка Вячеслав Романович, Полюдов Олександр Миколайович
МПК: F16F 15/22
Мітки: механізм, кривошипно-повзунний
Формула / Реферат:
Кривошипно-повзунний механізм, який складається з шатуна, повзуна з двома пружинами, противаги, який відрізняється тим, що він додатково містить привідну кулісу змінної довжини, зв'язану з противагою, яка через додатковий кулісний камінь контактує з нерухомим кулачком і шатуном.
Чотириланцюговий шарнірний кривошипно-коромисловий механізм
Номер патенту: 8916
Опубліковано: 15.08.2005
Автор: Кононенко Володимир Іванович
МПК: F16H 21/52
Мітки: шарнірний, механізм, кривошипно-коромисловий, чотириланцюговий
Формула / Реферат:
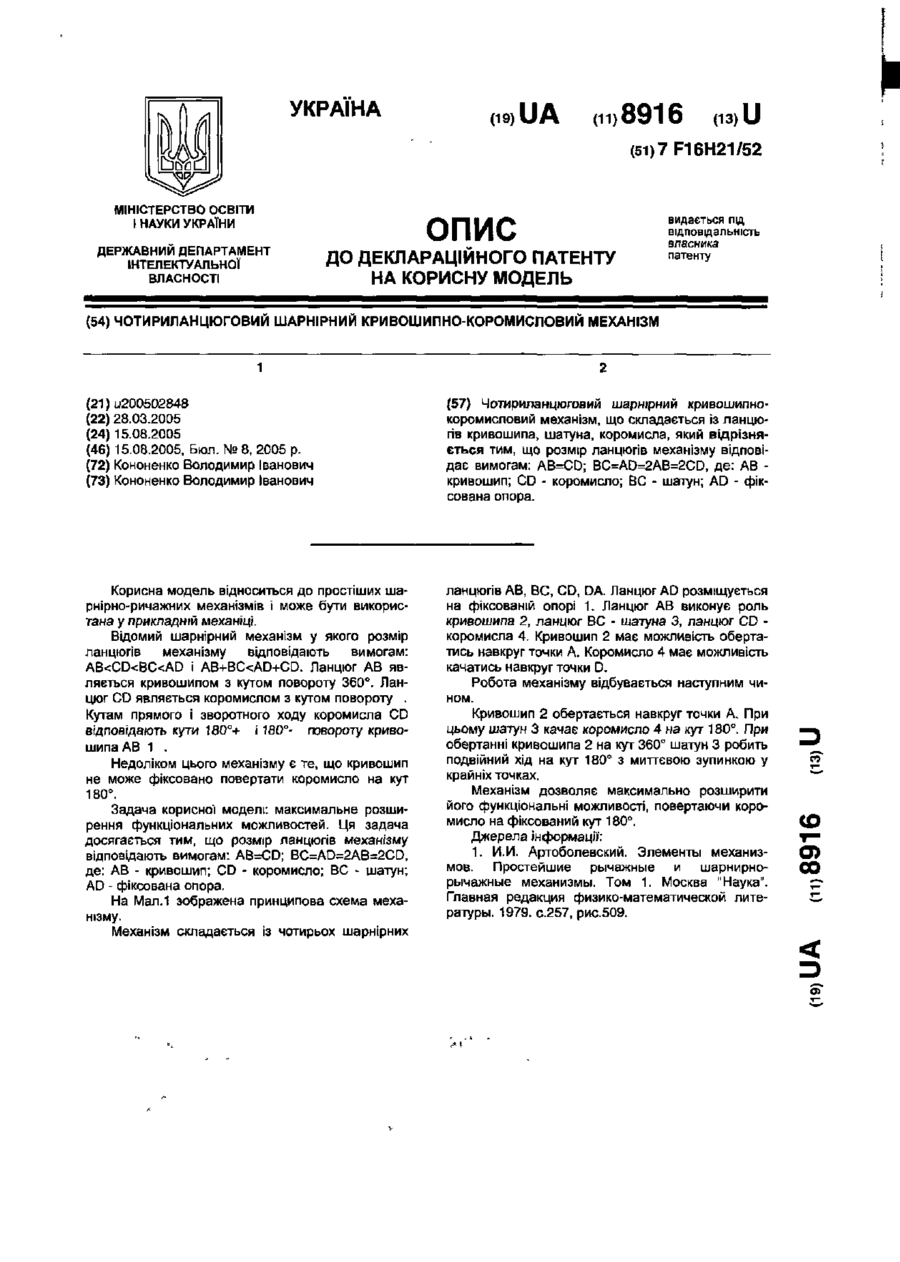
Чотириланцюговий шарнірний кривошипно-коромисловий механізм, що складається із ланцюгів кривошипа, шатуна, коромисла, який відрізняється тим, що розмір ланцюгів механізму відповідає вимогам: АВ=CD; ВС=AD=2АВ=2CD, де: АВ - кривошип; CD - коромисло; ВС - шатун; AD - фіксована опора.
Кривошипно-шатунний механізм поршневої машини
Номер патенту: 50789
Опубліковано: 15.11.2002
Автор: Підгорний Олександр Сергійович
МПК: F01B 9/04
Мітки: механізм, поршневої, машини, кривошипно-шатунний
Формула / Реферат:
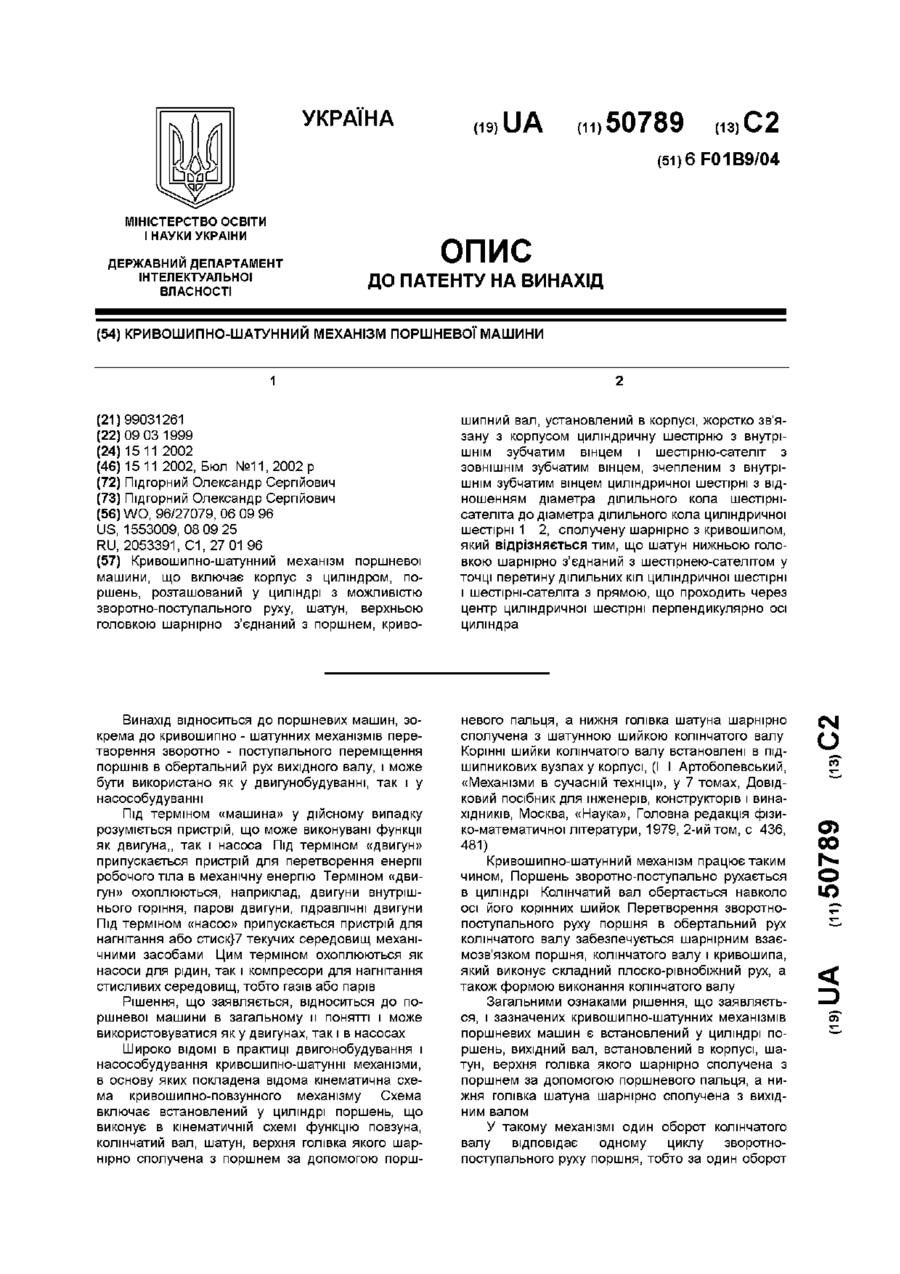
Кривошипно-шатунний механізм поршневої машини, що включає корпус з циліндром, поршень, розташований у циліндрі з можливістю зворотно-поступального руху, шатун, верхньою головкою шарнірно з’єднаний з поршнем, кривошипний вал, установлений в корпусі, жорстко зв'язану з корпусом циліндричну шестірню з внутрішнім зубчатим вінцем і шестірню-сателіт з зовнішнім зубчатим вінцем, зчепленим з внутрішнім зубчатим вінцем циліндричної шестірні з...
Попередній патент: Спосіб а.і. іщука лікування вертеброгенного радикуліту
Наступний патент: Абразивна маса
Випадковий патент: Спосіб виготовлення трафаретних друкарських форм лазерним випромінюванням і композиція для його реалізації