Спосіб механічної передачі обертального моменту від привідного до веденого вала і планетарний механізм для його здійснення
Формула / Реферат
1. Спосіб механічної передачі обертального моменту від привідного вала до веденого, що полягає у використанні механізму посилення обертального моменту, який відрізняється тим, що як механізм посилення обертальногомоменту використовують ексцентрикову передачу обертання, виконану у вигляді кривошипно-повзункового механізму з кільцевим шатуном, установленим на роликах на кривошипі, і повзунами, виконаними у вигляді дисків, установлених з ексцентриситетом на осях і з можливістю взаємодії своїми зовнішніми поверхнями із зовнішньою поверхнею шатуна, причому осі повзунів розташовані у водилі на рівній відстані від осі обертання кривошипа.
2. Спосіб по п. 1, який відрізняється тим, що використовують додаткову ексцентрикову передачу обертання, виконану у вигляді кривошипно-повзункового механізму з кільцевими шатунами, установленими на роликах на кривошипі, і повзунами, виконаними у вигляді пластин, установлених на шатуні з можливістю зворотно-поступального переміщення в площині обертання кривошипа, і зв'язаних з осями дискових повзунів, а водило встановлене на веденому валу з можливістю повороту щодо нього.
3. Планетарний механізм, утримуючий корпус, співвісно розташовані в ньому привідний й ведений вали, водило, зовнішнє зубчасте колесо, жорстко закріплене на веденому валу, ексцентрикову передачу обертання від привідного вала до веденого, виконану у вигляді кривошипно-повзункового механізму з кільцевим шатуном, установленим на роликах на кривошипі, й повзунами, що містять жорстко зв'язані з кожним із них вісь і сателіт, установлені з можливістю взаємодії із шатуном і зовнішнім зубчастим колесом, який відрізняється тим, що повзуни виконані у вигляді дисків, установлених з ексцентриситетом на осях і можливістю взаємодії своїми зовнішніми поверхнями з зовнішньою поверхнею шатуна, причому осі повзунів розташовані у водилі на рівній відстані від осі обертання кривошипа.
4. Планетарний механізм по п. 3, який відрізняється тим, що оснащений додатковою ексцентриковою передачею, виконаною у вигляді кривошипно-повзункового механізму з кільцевими шатунами, установленими на роликах на кривошипі, і повзунами, виконаними у вигляді пластин, установлених на шатунах із можливістю зворотно-поступального переміщення в площині обертання водила і зв'язаних із дисковими повзунами за допомогою їхніх осей, що входять у пази пластинчастих повзунів, а водило встановлене на веденому валу з можливістю повороту щодо нього.
5. Планетарний механізм по п. 4, який відрізняється тим, що кривошипи основної й додаткової ексцентрикових передач жорстко зв'язані з привідним валом і виконані з різними по величині ексцентриситетами.
Текст
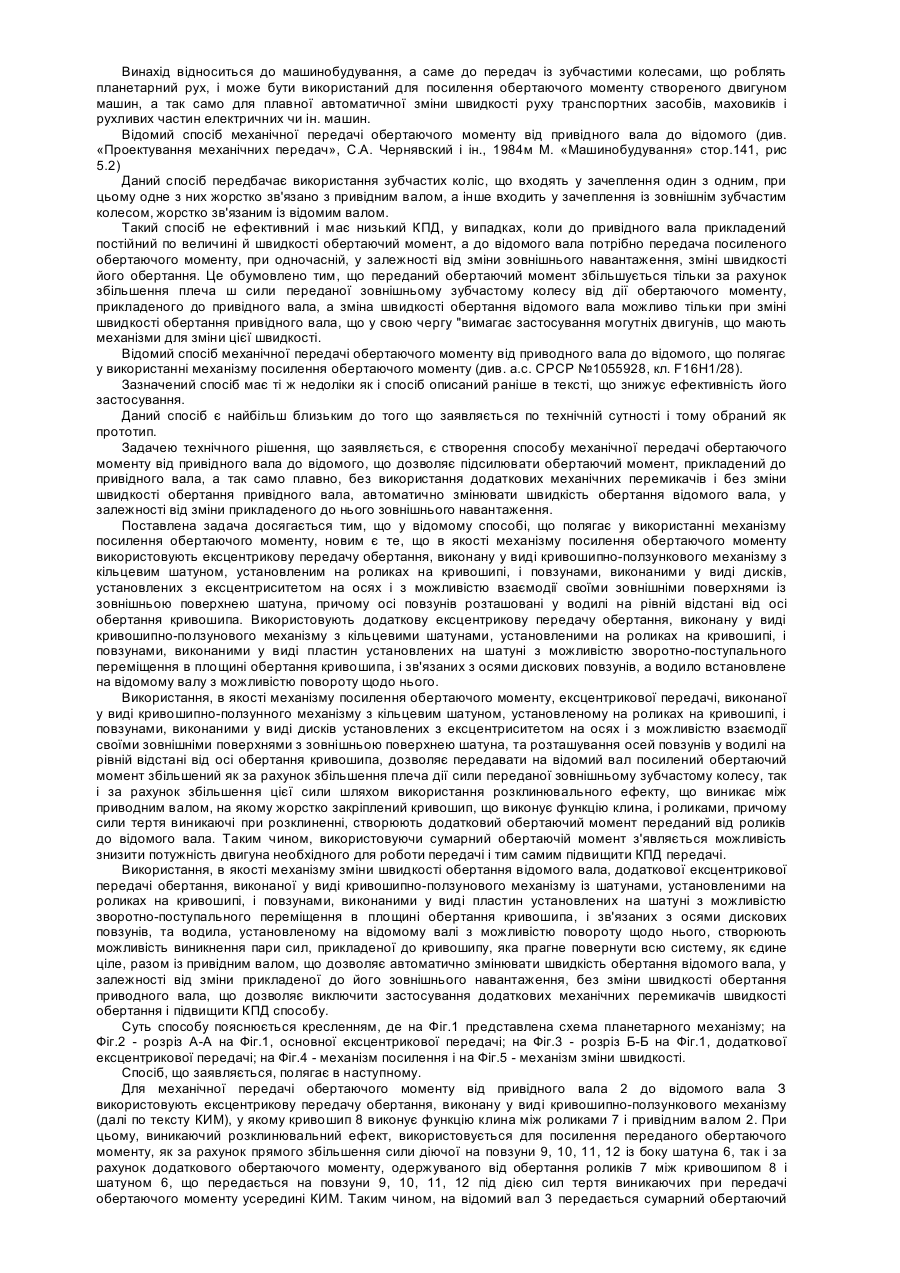
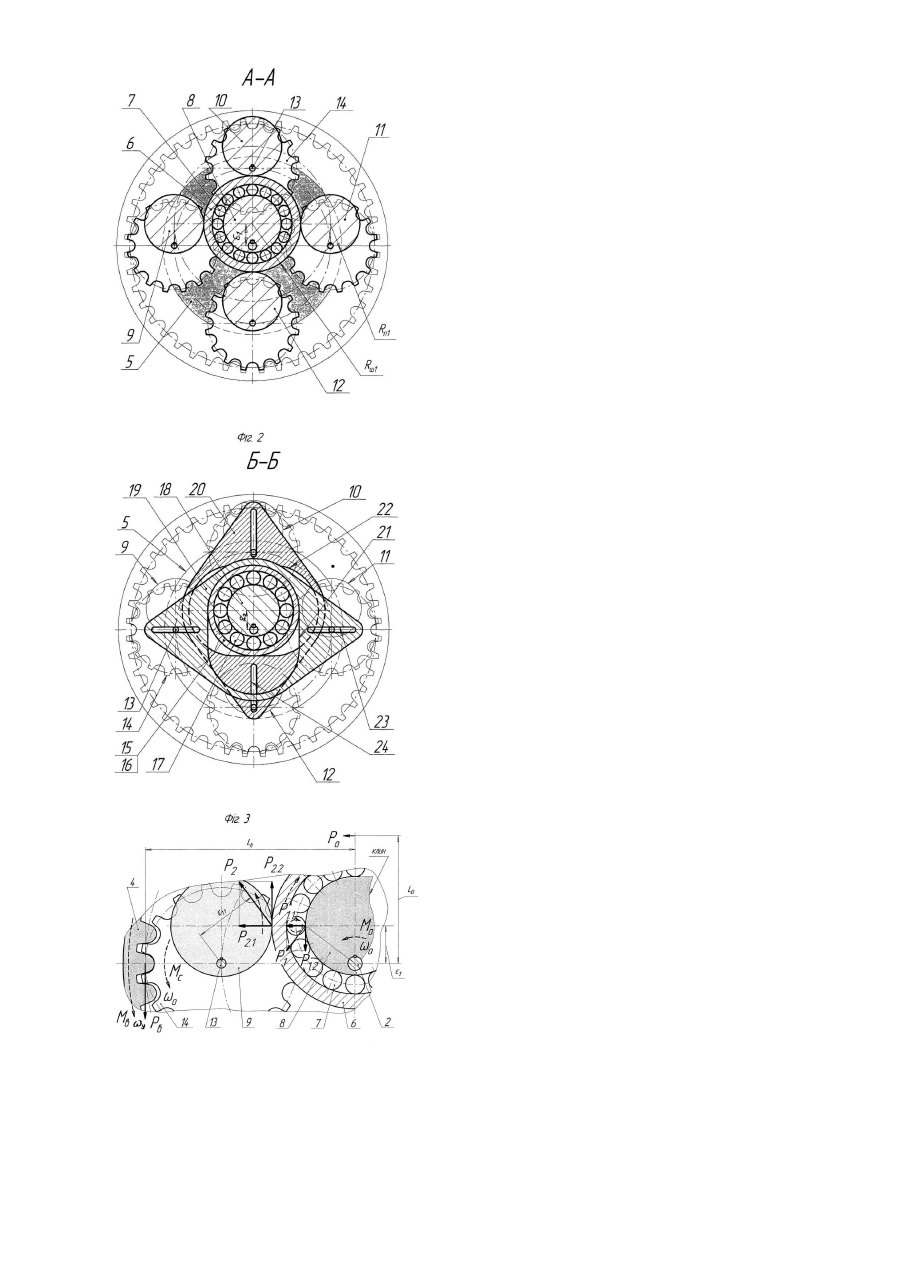
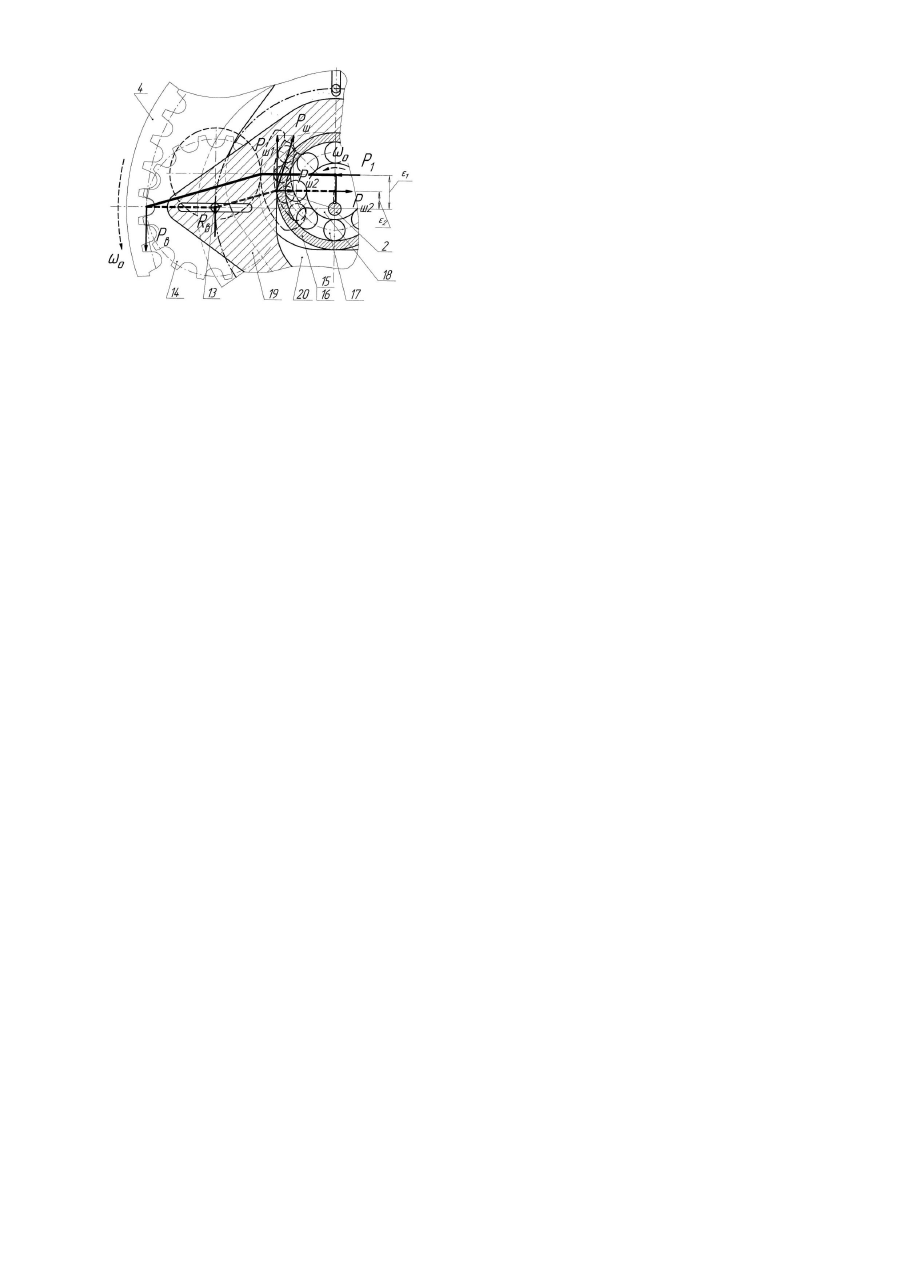
Винахід відноситься до машинобудування, а саме до передач із зубчастими колесами, що роблять планетарний рух, і може бути використаний для посилення обертаючого моменту створеного двигуном машин, а так само для плавної автоматичної зміни швидкості руху транспортних засобів, маховиків і рухливих частин електричних чи ін. машин. Відомий спосіб механічної передачі обертаючого моменту від привідного вала до відомого (див. «Проектування механічних передач», С.А. Чернявский і ін., 1984м М. «Машинобудування» стор.141, рис 5.2) Даний спосіб передбачає використання зубчастих коліс, що входять у зачеплення один з одним, при цьому одне з них жорстко зв'язано з привідним валом, а інше входить у зачеплення із зовнішнім зубчастим колесом, жорстко зв'язаним із відомим валом. Такий спосіб не ефективний і має низький КПД, у випадках, коли до привідного вала прикладений постійний по величині й швидкості обертаючий момент, а до відомого вала потрібно передача посиленого обертаючого моменту, при одночасній, у залежності від зміни зовнішнього навантаження, зміні швидкості його обертання. Це обумовлено тим, що переданий обертаючий момент збільшується тільки за рахунок збільшення плеча ш сили переданої зовнішньому зубчастому колесу від дії обертаючого моменту, прикладеного до привідного вала, а зміна швидкості обертання відомого вала можливо тільки при зміні швидкості обертання привідного вала, що у свою чергу "вимагає застосування могутніх двигунів, що мають механізми для зміни цієї швидкості. Відомий спосіб механічної передачі обертаючого моменту від приводного вала до відомого, що полягає у використанні механізму посилення обертаючого моменту (див. а.с. СРСР №1055928, кл. F16H1/28). Зазначений спосіб має ті ж недоліки як і спосіб описаний раніше в тексті, що знижує ефективність його застосування. Даний спосіб є найбільш близьким до того що заявляється по технічній сутності і тому обраний як прототип. Задачею технічного рішення, що заявляється, є створення способу механічної передачі обертаючого моменту від привідного вала до відомого, що дозволяє підсилювати обертаючий момент, прикладений до привідного вала, а так само плавно, без використання додаткових механічних перемикачів і без зміни швидкості обертання привідного вала, автоматично змінювати швидкість обертання відомого вала, у залежності від зміни прикладеного до нього зовнішнього навантаження. Поставлена задача досягається тим, що у відомому способі, що полягає у використанні механізму посилення обертаючого моменту, новим є те, що в якості механізму посилення обертаючого моменту використовують ексцентрикову передачу обертання, виконану у виді кривошипно-ползункового механізму з кільцевим шатуном, установленим на роликах на кривошипі, і повзунами, виконаними у виді дисків, установлених з ексцентриситетом на осях і з можливістю взаємодії своїми зовнішніми поверхнями із зовнішньою поверхнею шатуна, причому осі повзунів розташовані у водилі на рівній відстані від осі обертання кривошипа. Використовують додаткову ексцентрикову передачу обертання, виконану у виді кривошипно-ползунового механізму з кільцевими шатунами, установленими на роликах на кривошипі, і повзунами, виконаними у виді пластин установлених на шатуні з можливістю зворотно-поступального переміщення в площині обертання кривошипа, і зв'язаних з осями дискових повзунів, а водило встановлене на відомому валу з можливістю повороту щодо нього. Використання, в якості механізму посилення обертаючого моменту, ексцентрикової передачі, виконаної у виді кривошипно-ползунного механізму з кільцевим шатуном, установленому на роликах на кривошипі, і повзунами, виконаними у виді дисків установлених з ексцентриситетом на осях і з можливістю взаємодії своїми зовнішніми поверхнями з зовнішньою поверхнею шатуна, та розташування осей повзунів у водилі на рівній відстані від осі обертання кривошипа, дозволяє передавати на відомий вал посилений обертаючий момент збільшений як за рахунок збільшення плеча дії сили переданої зовнішньому зубчастому колесу, так і за рахунок збільшення цієї сили шляхом використання розклинювального ефекту, що виникає між приводним валом, на якому жорстко закріплений кривошип, що виконує функцію клина, і роликами, причому сили тертя виникаючі при розклиненні, створюють додатковий обертаючий момент переданий від роликів до відомого вала. Таким чином, використовуючи сумарний обертаючій момент з'являється можливість знизити потужність двигуна необхідного для роботи передачі і тим самим підвищити КПД передачі. Використання, в якості механізму зміни швидкості обертання відомого вала, додаткової ексцентрикової передачі обертання, виконаної у виді кривошипно-ползунового механізму із шатунами, установленими на роликах на кривошипі, і повзунами, виконаними у виді пластин установлених на шатуні з можливістю зворотно-поступального переміщення в площині обертання кривошипа, і зв'язаних з осями дискових повзунів, та водила, установленому на відомому валі з можливістю повороту щодо нього, створюють можливість виникнення пари сил, прикладеної до кривошипу, яка прагне повернути всю систему, як єдине ціле, разом із привідним валом, що дозволяє автоматично змінювати швидкість обертання відомого вала, у залежності від зміни прикладеної до його зовнішнього навантаження, без зміни швидкості обертання приводного вала, що дозволяє виключити застосування додаткових механічних перемикачів швидкості обертання і підвищити КПД способу. Суть способу пояснюється кресленням, де на Фіг.1 представлена схема планетарного механізму; на Фіг.2 - розріз А-А на Фіг.1, основної ексцентрикової передачі; на Фіг.3 - розріз Б-Б на Фіг.1, додаткової ексцентрикової передачі; на Фіг.4 - механізм посилення і на Фіг.5 - механізм зміни швидкості. Спосіб, що заявляється, полягає в наступному. Для механічної передачі обертаючого моменту від привідного вала 2 до відомого вала З використовують ексцентрикову передачу обертання, виконану у виді кривошипно-ползункового механізму (далі по тексту КИМ), у якому кривошип 8 виконує функцію клина між роликами 7 і привідним валом 2. При цьому, виникаючий розклинювальний ефект, використовується для посилення переданого обертаючого моменту, як за рахунок прямого збільшення сили діючої на повзуни 9, 10, 11, 12 із боку шатуна 6, так і за рахунок додаткового обертаючого моменту, одержуваного від обертання роликів 7 між кривошипом 8 і шатуном 6, що передається на повзуни 9, 10, 11, 12 під дією сил тертя виникаючих при передачі обертаючого моменту усередині КИМ. Таким чином, на відомий вал 3 передається сумарний обертаючий момент, що дозволяє зменшити потужність двигуна необхідну для роботи передачі, що підвищує КПД передачі. Для автоматичної зміни швидкості обертання відомого вала 3, використовують додаткову ексцентрикову передачу обертання, виконану у виді КПМ, у якому повзуни 19, 20, спираючись через шатуни 15, 16 і ролики 17 на кривошип 18, виконують функцію опори для осей 13 повзунів 9, 10, 11, 12, що виключає обертання водила 5 і кривошипа 18 у протилежні сторони. Крім цього, за рахунок пазів 21, 22, взаємодіючих із шатунами 15, 16 і пазів 23, 24 взаємодіючих з осями 13, повзуни 19, 20, роблячи зворотнопоступальне переміщення щодо осей 13, забезпечують рівнобіжну роботу основної й додаткової ексцентрикових передач обертання, одна з яких прагне обертати відомий вал 3 із мінімальною швидкістю, обумовленою передаточним числом механізму, й посиленим обертаючим моментом, а інша, за рахунок сили діючої на кривошип 18 під дією сили реакції опори осей 13 на повзуни 19, 20, прагне обертати відомий вал 3 зі швидкістю привідного 2 вали. Це дозволяє, без зміни швидкості обертання привідного вала 2, автоматично змінювати швидкість обертання відомого вала 3, у залежності від зміни прикладеної до нього зовнішнього навантаження, без застосування додаткових механічних перемикачів, що підвищує КПД передачі. Відомий планетарний механізм для передачі обертання утримуючий корпус, привідний і відомий вали, водило, передачу обертання від привідного до відомого вала і зовнішнє зубчасте колесо (див. «Проектування механічних передач», С.А. Чернявский і ін., 1984м М. «Машинобудування» стор.141, рис 5.2). У відомому пристрої передача обертання від привідного до відомого вала включає центральне зубчасте колесо, закріплене на привідному валі, зовнішнє зубчасте колесо й сателіти, розташовані з можливістю взаємодії з водилом і обкатування між центральним зубчастим колесом і зовнішнім зубчастим колесом, що закріплено на корпусі. Зазначений пристрій має постійне передатне відношення кутових швидкостей і обертаючих моментів, прикладених до привідного й відомого валів. Відомий планетарний механізм утримуючий корпус, соосно розташовані в ньому привідний і відомий вали, водило, зовнішнє зубчасте колесо, жорстко закріплене на відомому валу, ексцентрикову передачу обертання від привідного вала до відомого, виконану у виді КГТМ із кільцевим шатуном, установленим на роликах на кривошипі, і повзунами, установленими з можливістю взаємодії із шатуном і зовнішнім зубчастим колесом, маючіми жорстко зв'язані з ними ось і внутрішнє зубчасте колесо, (див. а. с. СРСР №1055928, кл. F16Н1/28). Зазначена конструкція, компактна, однак вона, так само має постійне передатне відношення кутових швидкостей і обертаючих моментів, прикладених до привідного й відомого валів, що не дозволяє використовувати її без застосування могутніх двигунів у випадках великої амплітуди зміни опору руху, що вимагає додатка великих зусиль і одночасної автоматичної зміни передатного відношення механізму. Даний планетарний механізм є найбільш близьким до того що заявляється по технічній сутності і тому обраний як прототип. Задачею технічного рішення, що заявляється, є створення планетарного механізму, що дозволяє підсилювати обертаючий момент, прикладений до привідного вала, а так само змінювати швидкість обертання відомого вала щодо привідного, без застосування додаткових механічних перемикачів, що дозволяє підвищити КПД планетарного механізму. Поставлена задача досягається тим, що в планетарному механізмі утримуючому корпус, соосно розташовані в ньому привідний і відомий вали, водило, зовнішнє зубчасте колесо, жорстко закріплене на відомому валу, ексцентрикову передачу обертання від привідного валу до відомого, виконану у виді КПМ із кільцевим шатуном, установленим на роликах на кривошипі, і повзунами, що включають жорстко зв'язані з ними ось і сателіт, установленими з можливістю взаємодії із шатуном і зовнішнім зубчастим колесом, новим є те, що повзуни виконані у виді дисків установлених на осях з ексцентриситетом, і з можливістю обертання і взаємодії своїми зовнішніми поверхнями з зовнішньою поверхнею шатуна, причому осі повзунів розташовані у водилі на рівній відстані від осі обертання кривошипа. Планетарний механізм, постачений додатковою ексцентриковою передачею, виконаної у виді КПМ із кільцевим шатуном, установленим на роликах на кривошипі, і пластинчастими повзунами, установленими на шатуні з можливістю зворотно-поступального переміщення в площині обертання кривошипів, і зв'язаними з дисковими повзунами за допомогою їхніх осей, що входять у пази виконані в пластинчастих повзунах, а водило встановлене на відомому валі з можливістю повороту довкола нього. Кривошипи основної й додатковий ексцентрикових передач, жорстко зв'язані з привідним валом і виконані з різним по величині ексцентриситетом. Виконання повзунів у виді дисків установлених на осях з ексцентриситетом, і з можливістю обертання й взаємодії своїми зовнішніми поверхнями із зовнішньою поверхнею шатуна, дозволяє використовувати розклинювальний ефект, створюваний кривошипом між привідним валом і роликами, за рахунок чого збільшується сила діюча на повзуни, у порівнянні із силою що діє на кривошип, і відповідно підсилюється обертаючий момент переданий зовнішньому зубчастому колесу. Крім цього сили тертя між кривошипом, роликами, шатуном і повзуном, створюють додатковий обертаючий момент, переданий зовнішньому зубчастому колесу. Таким чином, збільшується сумарний обертаючий момент виникаючий на відомому валу, що дозволяє підвищити КПД механізму. Розташування осей повзунів у водилі на рівній відстані від осі обертання кривошипа дозволяє всім повзунам працювати синхронно, забезпечуючи безупинний вплив сумарного обертаючого моменту на зовнішнє зубчасте колесо, що дозволяє підвищити КПД механізму. Постачання планетарного механізму додатковою ексцентриковою передачею, виконаної у виді КПМ із пластинчастими повзунами, установленими на кільцевих шатунах на роликах на кривошипі з можливістю зворотно-поступального переміщення в площині обертання кривошипа і зв'язаними з дисковими повзунами за допомогою їхніх осей, що входять у пази, виконані в пластинчастих повзунах, створює опору для осей дискових повзунів, жорстко зв'язаних із сателітами, що забезпечує обертання зовнішнього зубчастого колеса під дією прикладеного до сателітів посиленого обертаючого моменту і тим самим знижує витрати на створення необхідного обертаючого моменту прикладеного до приводного вала і цим підвищує КПД механізму. Зв'язок пластинчастих повзунів із дисковими повзунами за допомогою їхніх осей, що входять у пази пластинчастих повзунів, і установка водила з можливістю повороту навколо відомого вала, забезпечує рівнобіжну роботу основної й додаткової ексцентрикових передач, одна з яких прагне обертати відомий вал із мінімальною швидкістю, обумовленою передаточним числом механізму, і посиленим обертаючим моментом, а інша, за рахунок сили діючої на кривошип під дією сили реакції опори осей дискових повзунів на пластинчасті повзуни , прагне обертати відомий вал зі швидкістю привідного вала . Це дозволяє, без зміни швидкості обертання привідного вала, автоматично змінювати швидкість обертання відомого вала, у залежності від зміни прикладеного до нього зовнішнього навантаження, без застосування додаткових механічних перемикачів, що підвищує КПД передачі. Виконання кривошипів основної й додаткової ексцентрикових передач із різними по величині ексцентриситетами, виключає можливість обертання водила із сателітами у зворотну сторону стосовно напрямку обертання кривошипів і забезпечує простоту й надійність передачі однобічного обертання приводного й відомого валів, що підвищує КПД механізму. Суть винаходу пояснюється кресленням, де на Фіг.1 представлена схема планетарного механізму; на Фіг.2 - розріз А-А на Фіг.1, основний ексцентрикової передачі; на Фіг.3 - розріз Б-Б на Фіг.1, додаткової ексцентрикової передачі; на Фіг.4 - механізм посилення і на Фіг.5 - механізм зміни швидкості. Планетарний механізм містить корпус 1, у якому соосно встановлені привідний вал 2 і відомий вал 3, жорстко зв'язане з відомим валом 3 зовнішнє зубчасте колесо 4, водило 5, ексцентрикову передачу обертання від приводного вала 2 до відомого вала 3, виконану у виді КПМ із кільцевим шатуном 6, установленим на роликах 7 на кривошипі 8, і дисковими повзунами 9,10,11,12, установленими з ексцентриситетом на осях 13. При цьому кривошип 8, з ексцентриситетом e 1, жорстко зв'язаний із приводним валом 2, а повзуни 9, 10, 11, 12 жорстко зв'язані із сателітами 14 за допомогою осей 13, що входять у зачеплення із зовнішнім зубчастим колесом 4. Осі 13 зв'язані між собою за допомогою водила 5, у якому вони встановлені з можливістю повороту щодо своїх осей й розташовані на рівній відстані від осі обертання кривошипа 8, що забезпечує синхронність спрацьовування повзунів 9, 10, 11, 12, виконаних у виді дисків жорстко закріплених на осях 13 з ексцентриситетом e 1 рівному по величині й напрямку ексцентриситету e 1 кривошипа 8. Завдяки тому що водило 5 установлене на відомому валу з можливістю повороту щодо нього, планетарний механізм дозволяє передавати на відомий вал 3 кутову швидкість обертання, відмінну від кутової швидкості обертання приводного вала 2. Відстань між осями привідного вала 2 і відомого вала 3 та осями 13 складає: A=Rш1+Rп1 де: Rш1- радіус шатуна 6; Rп1 - радіус повзунів 9, 10, 11, 12. Планетарний механізм постачений додатковою ексцентриковою передачею обертання, виконаною у виді КПМ із кільцевими шатунами 15,16, установленими на роликах 17 на кривошипі 18 жорстко закріпленому з ексцентриситетом e 2 на приводному валі 2, і пластинчастими повзунами 19,20, установленими на шатунах 15, 16 з можливістю зворотно-поступального переміщення в площині обертання кривошипів 8 і 18. Повзуни 19, 20 установлені на шатунах 15, 16 за допомогою центральних пазів 21, 22 і постачені додатковими пазами 23,24, за допомогою яких вони встановлені на осях 13 жорстко зв'язаних із повзунами 9, 10, 11, 12 і сателітами 14. Ширина центральних пазів 21, 22 відповідає діаметру dш шатунів 15,16, а їхня мінімальна довга дорівнює dш+2e 2. Ширина додаткових пазів 23, 24 відповідає діаметру doc осей 13, а їхня мінімальна довга дорівнює doc+2e 2. Основна ексцентрикова передача, призначена для передачі обертання від привідного вала 2 до зовнішнього зубчастого колеса 4, а так само для посилення обертаючого моменту, прикладеного до привідного вала 2, за рахунок збільшення сили, із якою сателіти 14 впливають на зовнішнє зубчасте колесо 4, тому що кривошип 8 у даній конструкції виконує функцію клина між привідним валом 2 та роликами 7. Додаткова ексцентрикова передача призначена для опори осей 13 повзунів 9, 10, 11, 12 із сателітами 14 основної ексцентрикової передачі й автоматичної зміни швидкості обертання відомого вала, при зміні навантаження на відомий вал. Планетарний механізм працює таким чином. Під дією обертаючого моменту Mo=Po·Lo (де: Ро - сила; Lo - плече додатка сили), прикладеного до привідного вала 2 і відсутності навантаження на відомий вал 3, планетарний механізм прагне обертати відомий вал 3 із кутовою швидкістю, рівної кутової швидкості w 0 привідного вала 2. Під дією навантаження на відомий вал 3, зовнішнє зубчасте колесо 4, жорстко закріплене на цьому валі, чинить опір обертанню сателітів 14 з осями 13 і водилом 5 навколо осі привідного вала 2. Для подолання цього опору, починає спрацьовувати основна ексцентрикова передача обертання. Кривошип 8 цієї передачі під дією сили Ро за рахунок ексцентриситету e 1 створює силу діючу на ролики 7, шатун 6, повзуни 9,10,11,12 і зовнішнє зубчасте колесо 4. При передачі цієї сили через ролики на шатун вона розкладається на сили Р1.1 та Р1.2. Ролик 7, під дією сили Р1.1, притискає шатун 6 до дискових повзунів 9, 10, 11, 12 і одночасно, під дією сили Р1.2 та виникаючих сил тертя, ролик 7 одержує обертання убік протилежний обертанню кривошипа 8. При цьому шатун 6 , одержує однобічне з роликом 7 напрямок обертання. При обертанні, шатун 6 по черзі передає дисковим повзунам 9, 10, 11, 12 сумарне зусилля Р2, величина якого складається із сили Р2.1, отриманої у результаті прямої дії сили Р1.1 і зусилля розклинювання кривошипом 8 роликів 7 та привідного вала 2 під дією сили Р1, а так само сили Р2.2, отриманої за рахунок сил тертя й обертаючого моменту, прикладеного до шатунові 6 від роликів 7, під дією сили Р1.2. Таким чином, сила Р2, за рахунок ексцентриситету її додатка до повзунів 9, 10, 11, 12 щодо осі 13, створює на цій осі 13 обертаючий момент Мс=Р2х e1.1, що передається сателітам 14. У свою чергу сателіти 14 під дією обертаючого моменту Мс створюють силу Рв діючу на зовнішнє зубчасте колесо 4 і обертаючий момент Мв=Р2хLв (де: Lв - плече додатка сили, рівне радіусу ділильної окружності зовнішнього зубчастого колеса 4). При цьому швидкість обертання відомого вала 3 дорівнює w у=dc/dвxw 0 (де: dc діаметр ділильної окружності сателіта 14; dв -діаметр ділильної окружності зовнішнього зубчастого колеса 4). При цьому, у місці опори осей 13 на пластинчасті повзуни 19, 20 додаткової ексцентрикової передачі, виникає реакція опори Rв, рівна по величині силі Рв, прикладеної до зовнішнього зубчастого колеса 4 і протилежно до неї спрямована. Ця реакція опори передається шатунам 15,16 і діє на них із силою Рш. Одна зі складових цієї сили (Рш1), за рахунок сил тертя, прагне повернути шатуни 15, 16 убік, протилежну обертанню кривошипа 18, що, обертаючи разом із привідним валом 2 і кривошипом 8 основної ексцентрикової передачі, так само прагне провернути шатуни в ту ж сторону. Інша складових цієї сили (Рш2) спрямована до центра ексцентриситету 82, тобто убік протилежну зусиллю Ρ1.1. У випадку навантаження на зовнішнє зубчасте колесо 4, сателіти 14, обертаючи навколо власних осей 13, можуть обкатуватися по периметрі зовнішнього зубчастого колеса 4, не передаючи останньому обертання щодо кривошипа 8. Що б забезпечити обертання зовнішнього зубчастого колеса 4 щодо кривошипа 8 і привідного вала 2, служить додаткова ексцентрикова передача. При цьому її кривошип 18, обертаючи разом із кривошипом 8, впливають через ролики 17 і шатуни 15, 16 на пластинчасті повзуни 19, 20, передаючі останнім зворотно-поступальне переміщення в площині обертання кривошипів 8, 18, завдяки установці на осях 13, за допомогою своїх пазів 23, 24. Це створює опору осям 13, необхідну для обертання зовнішнього зубчастого колеса 4 сателітами 14, тому що пластинчасті повзуни 19, 20 завдяки своїм центральним пазам 21, 22, не можуть повернутися щодо шатунів 15,16, а отже, і кривошипа 18. За рахунок різниці напрямку дії сил Ρ1.1 і Рш2 і різниці ексцентриситетів e 1 і 82 по величині, у випадку додатка навантаження на відомий вал 3, виникає пари сил, що прагне об'єднати всі елементи планетарного механізму в одну тверду систему і повернути її разом із приводним валом 2, прагнучи повідомити відомому валові 3 кутову швидкість привідного вала 2w 0. Таким чином, використання двох, взаємозалежних через осі 13, ексцентрикових передач, виконаних у виді КПМ із кільцевими шатунами 6, 15, 16 установлених на роликах 7, 17 на кривошипах 8, 18 і повзунами 9, 10, 11, 12 виконаних у виді дисків, а так само повзунів 19, 20, виконаних у виді пластин із центральними пазами, дозволяють підсилювати переданий від привідного вала 2 до відомого вала 3 обертаючий момент за рахунок використання сил виникаючих при розклиненні роликів 7, 17 і привідного вала 2 кривошипами 8, 18, а так само сил тертя, що виникають при передачі обертаючих моментів усередині КПМ. При цьому, за рахунок рухливого, навколо відомого вала 3, розташування водила 5 та рівнобіжної роботи основної й додаткової ексцентрикових передач обертання, швидкість обертання відомого вала 3, автоматично змінюється в межах від швидкості w у - при максимальному навантаженні, до 9 швидкості обертання привідного вала 2w 0 - при мінімальному навантаженні на відомий вал 3, без зміни швидкості обертання привідного вала 2.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for mechanical transfer of torque from the drive shaft to the driven one and planetary mechanism for implementation of the method
Назва патенту російськоюСпособ механической передачи вращательного момента от приводного к ведомому валу и планетарный механизм для его осуществления
МПК / Мітки
МПК: F16H 1/28
Мітки: спосіб, механічної, механізм, веденого, передачі, привідного, моменту, здійснення, обертального, вала, планетарний
Код посилання
<a href="https://ua.patents.su/6-73975-sposib-mekhanichno-peredachi-obertalnogo-momentu-vid-prividnogo-do-vedenogo-vala-i-planetarnijj-mekhanizm-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб механічної передачі обертального моменту від привідного до веденого вала і планетарний механізм для його здійснення</a>
Пружна муфта для передачі обертального моменту від електродвигуна на віброзбуджувач технологічної вібромашини
Номер патенту: 18087
Опубліковано: 17.06.1997
Автори: Солов`ян Сергій Дмитрович, Олехнович Казимир Олександрович, Бахмудов Курбан Алісултанович
МПК: F16D 43/00
Мітки: віброзбуджувач, електродвигуна, технологічної, передачі, моменту, пружна, муфта, обертального, вібромашини
Формула / Реферат:
Упругая муфта для передачи крутящего момента от электродвигателя на вибровозбудитель технологической вибромашины, включающая упругий трубчатый элемент из полимерного материала, отличающаяся тем, что между упругим элементом и валом вибровозбудителя дополнительно установлен промежуточный вал, размещенный внутри полости пустотелого дебалансного вала, в конечной части которой запрессована цилиндрическая втулка с поперечным гребнем, входящим в...
Інерційний планетарний трансформатор моменту
Номер патенту: 36321
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: F16H 31/00, B60K 17/06, F16H 33/00
Мітки: планетарний, інерційний, моменту, трансформатор
Формула / Реферат:
Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним циліндричним колесом, принаймні двома сателітами з встановленими з можливістю обертання відносно осей, перпендикулярних одній з діаметральних площин кожного сателіту, дебалансами, який відрізняється тим, що кожен з дебалансів зв’язаний з водилом конічною передачею з передаточним числом рівним одиниці, причому одне з коліс конічної передачі жорстко зв'язане з...
Планетарний механізм

Номер патенту: 50100
Опубліковано: 15.10.2002
Автори: Гаркавий Віктор Васильович, Лапай Андрій Кирилович
МПК: F16H 1/28
Мітки: планетарний, механізм
Формула / Реферат:
1. Планетарний механізм який містить вхідний вал, жорстко посаджене на вхідний вал водило, діаметрально встановлений в ньому з можливістю обертання вал, на якому жорстко посаджені сателіти, вихідний вал, який розміщений з можливістю обертання співвісно з вхідним валом, на якому жорстко встановлена центральна вихідна шестірня, встановлену нерухомо центральну шестірню, встановлену співвісно з центральною вихідною шестірнею, який відрізняється...
Вимірювач обертального моменту
Номер патенту: 41001
Опубліковано: 15.01.2004
Автори: Кузін Юрій Леонідович, Кожевников Анатолій Олександрович, Мартиненко Іван Іванович, Сірик Віктор Федорович
МПК: E21B 45/00, G01L 3/02
Мітки: обертального, вимірювач, моменту
Формула / Реферат:
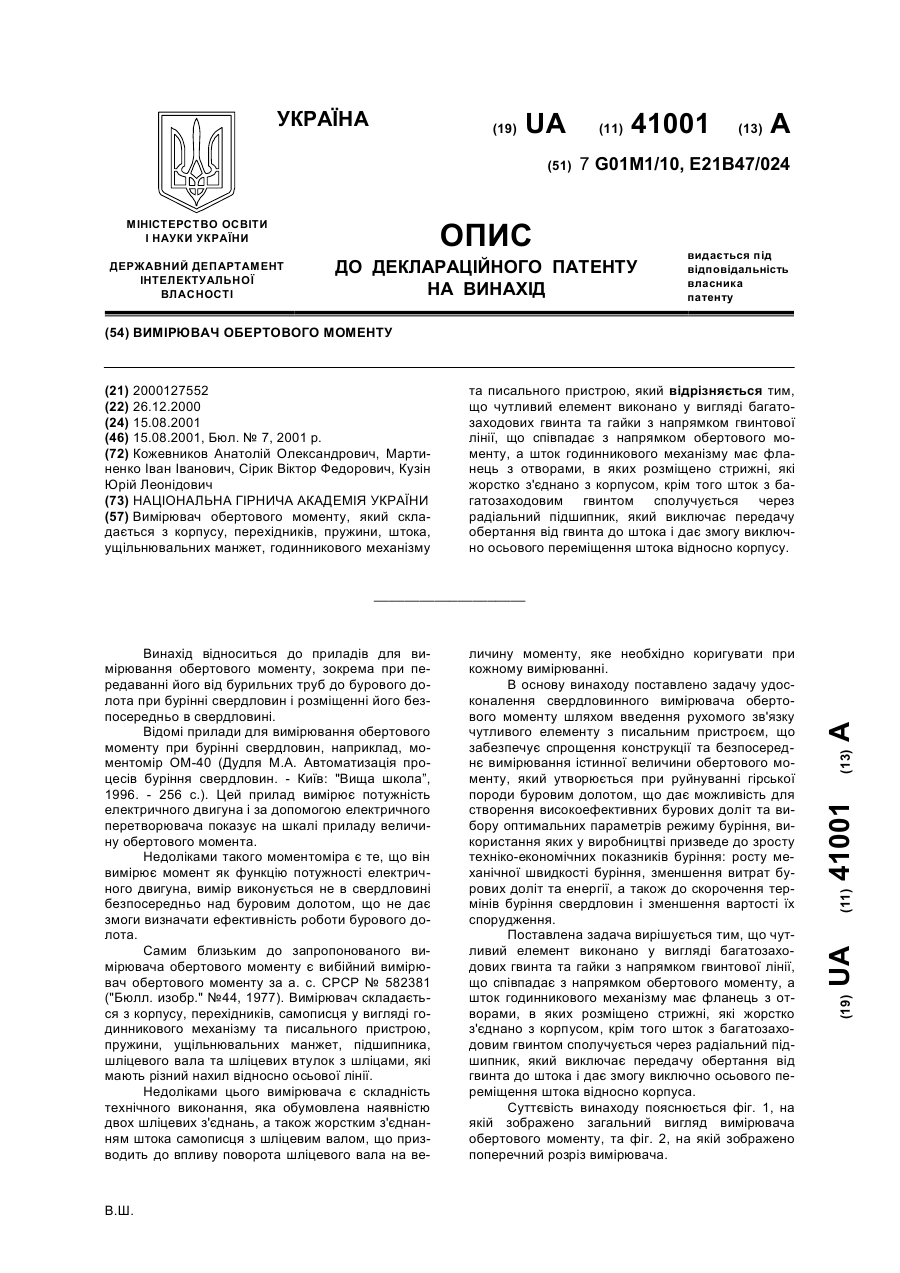
Вимірювач обертального моменту, який складається з корпусу, чутливого елемента, перехідників, пружини, штока, ущільнювальних манжет, годинникового механізму та записуючого пристрою, який відрізняється тим, що чутливий елемент виконано у вигляді багатозахідних гвинта та гайки з напрямком гвинтової лінії, що співпадає з напрямком обертального моменту, шток годинникового механізму має фланець з отворами, в яких розміщено стрижні, які жорстко...
Інерційний планетарний трансформатор моменту
Номер патенту: 55495
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: F16H 31/00, F16H 33/00
Мітки: інерційний, трансформатор, моменту, планетарний
Формула / Реферат:
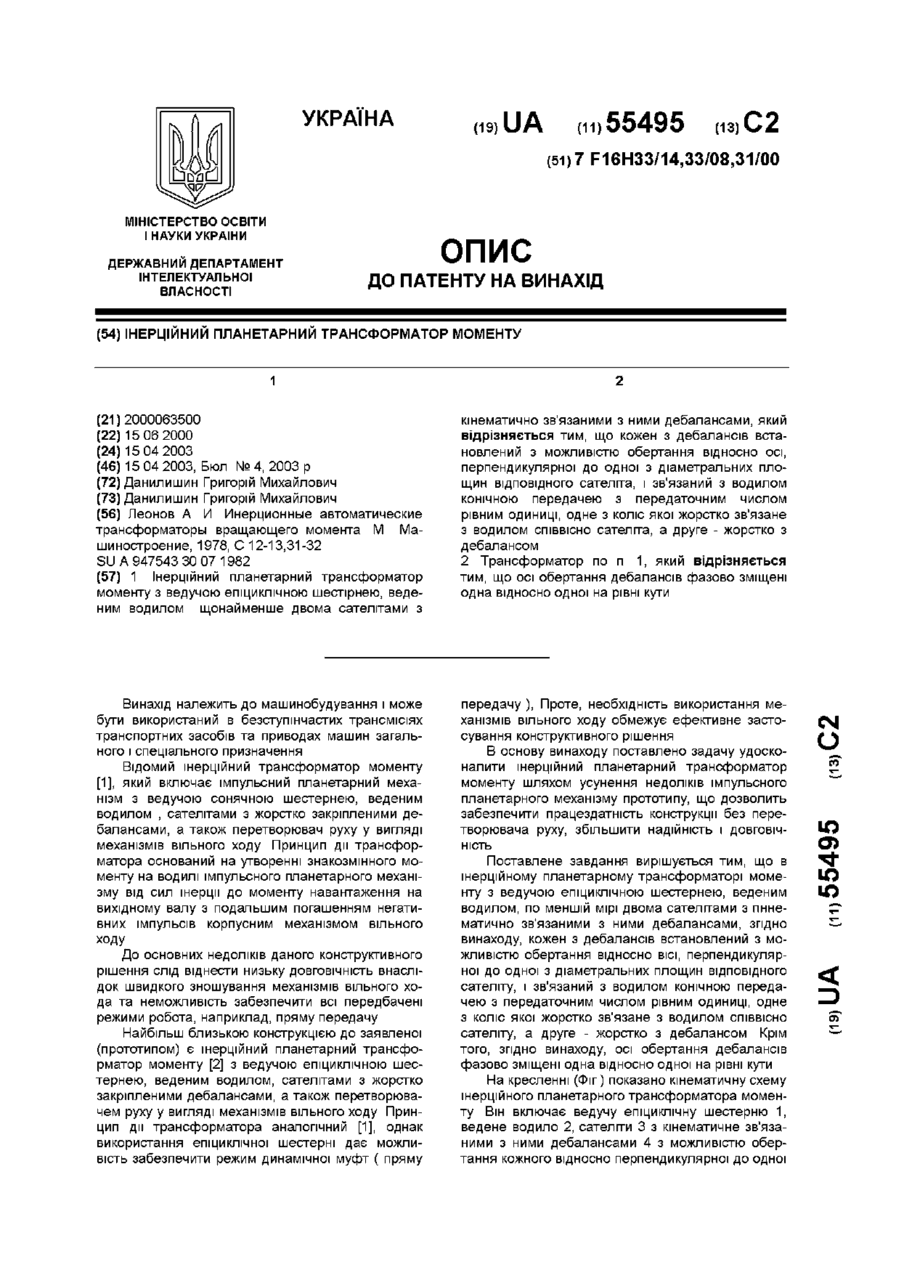
1. Інерційний планетарний трансформатор моменту з ведучою епіциклічною шестірнею, веденим водилом щонайменше двома сателітами з кінематично зв'язаними з ними дебалансами, який відрізняється тим, що кожен з дебалансів встановлений з можливістю обертання відносно осі, перпендикулярної до одної з діаметральних площин відповідного сателіта, і зв'язаний з водилом конічною передачею з передаточним числом рівним одиниці, одне з коліс якої жорстко...