Слідкуючий електропривід верстатів з чпу
Номер патенту: 74967
Опубліковано: 15.02.2006
Автори: Верещаго Євген Миколайович, Квасницький Вячеслав Федорович, Романовський Георгій Федорович, Просянов Олег Федорович

Формула / Реферат
Слідкуючий електропривід верстатів з ЧПУ, що містить силову частину у вигляді двигуна постійного струму з незалежним збудженням, який живиться від транзисторного перетворювача, з'єднаного через редуктор з виконавчим механізмом, а також з’єднаного зворотним зв'язком з датчиками швидкості і положення, та керуючу частину у вигляді контуру регулювання положення, який складається з датчика положення, першого суматора, перший вхід якого підключений до виходу верстатів з ЧПУ, а другий - до виходу датчика положення, П-регулятора положення, вхід якого з'єднаний з виходом першого суматора, а вихід підключений до одного з входів другого суматора, віднімаючий вхід якого з'єднаний з виходом датчика швидкості, і ПІ-регулятора швидкості, підключеного входом до виходу другого суматора, а виходом - до першого входу третього суматора, другий вхід якого з'єднаний з датчиком струму, і регулятора струму, підключеного входом до виходу третього суматора, а виходом - до транзисторного перетворювача напруги, який відрізняється тим, що у нього додатково введено підсумовуючий підсилювач, входи якого з'єднані з виходами верстатів з ЧПУ, з виходами датчиків положення і швидкості відповідно, четвертий суматор, перший вхід якого з'єднаний з виходом підсумовуючого підсилювача, а другий вхід - з виходом датчика струму, і підсилювач з коефіцієнтом підсилення k, причому вхід останнього підключений до виходу четвертого суматора, а вихід з'єднаний із третім входом другого суматора.
Текст
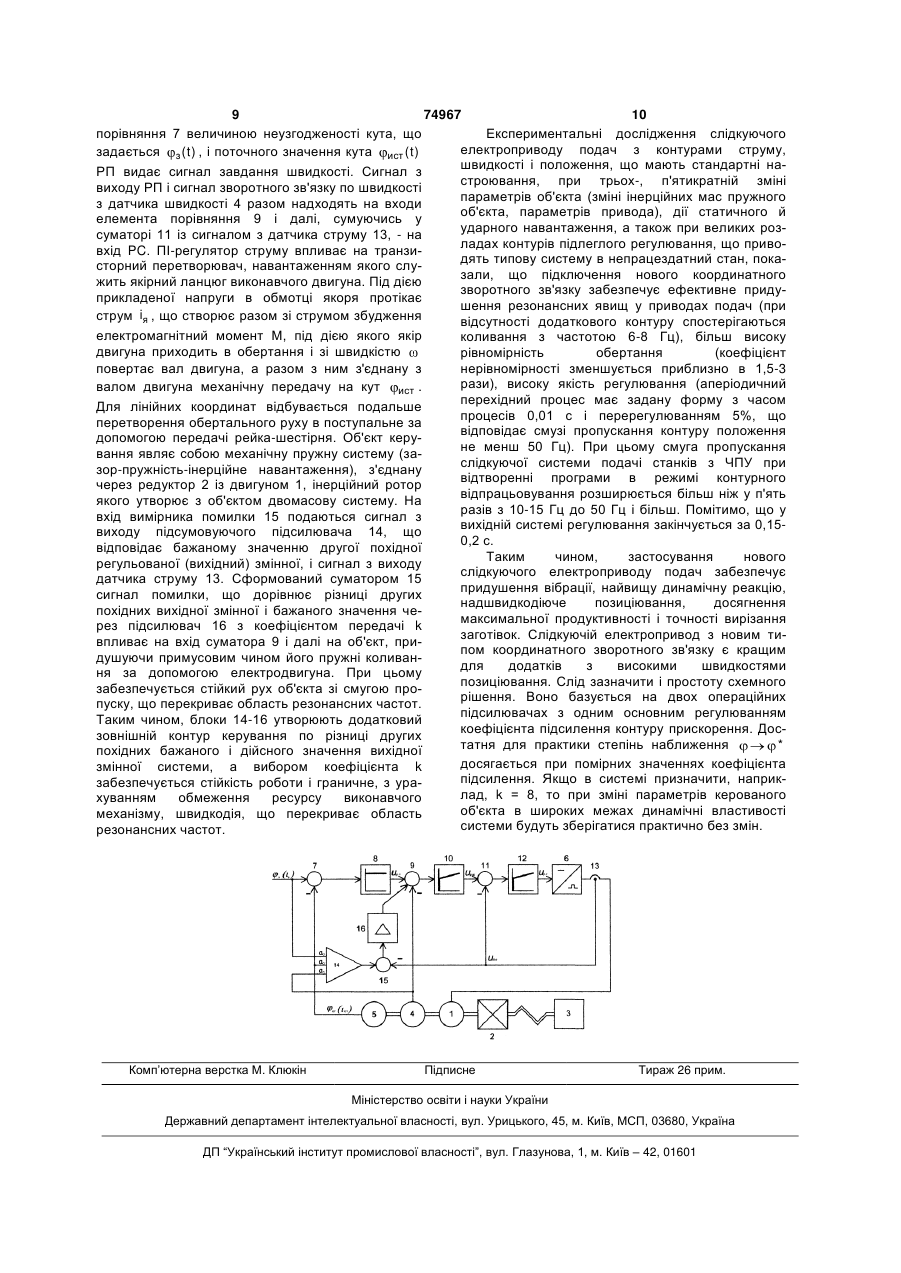
Слідкуючий електропривід верстатів з ЧПУ, що містить силову частину у вигляді двигуна постійного струму з незалежним збудженням, який живиться від транзисторного перетворювача, з'єднаного через редуктор з виконавчим механізмом, а також з’єднаного зворотним зв'язком з датчиками швидкості і положення, та керуючу частину у вигляді контуру регулювання положення, який складається з датчика положення, першого суматора, перший вхід якого підключений до виходу верста C2 2 (19) 1 3 74967 4 представляють собою датчики струму (ДС), часного транзисторного електропривода. У той же швидкості (ДШ) і положення (ДП) [Следящие элекчас в умовах неповноти інформації про стан керотропроводы станков с ЧПУ/А.М. Лебедев, Р.Т. Орваного процесу, неконтрольованих збурювань і лов, А.В. Пальцев. - М.: Энергоатомиздат, 1988. с. зміни властивостей об'єкта не представляється 44; Тимофеев А.В. Управление роботами: Учеб. можливим знайти задовільні рішення, базуючись в пособие. - Л.: Изд-во Ленингр. ун-та, 1986. с. 104]. керуванні на стаціонарні стратегії, особливо при Перший (внутрішній) контур - контур струму підвищених вимогах до точності і глибини регулюмістить у собі виконавчий двигун, керований транвання. Стабільність роботи системи з такими зисторний перетворювач, датчик струму, перший об'єктами безпосередньо залежить від гнучкості суматор і ПІ-регулятор струму (PC) з динамічним стратегій керування, що є функцією факторів, збурюючих об'єкт. На точність відтворення контуру коефіцієнтом підсилення регулятора і р.т. заготівки впливають і форма контуру деталі і постійної часу регулятора р.т. . На входи першого швидкість руху по контуру. Наприклад, замічено, що рух робота при обході кутів супроводжується елемента порівняння подаються сигнали завдання динамічними ефектами. Механічні системи "приструм у якоря uр.с. з регулятора зовнішнього конвод-портал", "привод-супорт" піддаються туру швидкості і датчика струму uд.т. . Вихідна наімпульсному впливові; тривалість імпульсу пруга PC подана на вхід транзисторного перетвоТи R /( 2v ) , де R - радіус обходу (для портальрювача. них роботів кисневого різання радіус окружності, Другий контур регулювання - контур швидкості. що апроксимує прямий кут, дорівнює 1...3мм, для Він містить у собі контур струму і, крім того, портальних роботів газолазерного різання містить другий суматор, датчик швидкості і ПІ0,1...1,0 мм); v - швидкість обходу. При цьому регулятор швидкості РШ із динамічним стрибкоподібне змінюються швидкість і прискокоефіцієнтом підсилення р.с. і постійної часу р.с. . рення руху. Очевидно, що динамічними ефектами форма вихідного кута буде перекручена, тому що На входи другого суматора подаються сигнали з час проходження кута порівняно з періодами датчика швидкості, пропорційний істинному знавласних коливань порталу і супорта. ченню швидкості, і з виходу РП, що відповідає заСтавиться задача удосконалення слідкуючого пропонованому значенню. електропривода подач верстатів з ЧПУ, у якому Контур положення, у свою чергу, складається введення додаткового контуру, орієнтованого на з контуру швидкості, датчика положення, третього подолання того або іншого виду невизначеності в суматора і П-регулятора положення. Кожний з цих поводженні об'єкта, забезпечує підвищення контурів являє собою систему автоматичного реточності і якості слідкуючої системи керування при гулювання з координатним зворотним зв'язком, збереженні високих інваріантних властивостей причому вихідний сигнал регулятора зовнішнього електропривода подач верстатів з ЧПУ в умовах контуру є задавальним (запропонованим значенширокої зміни адитивних і параметричних збурюням) для регулятора внутрішнього контуру, тобто вань і впливу нелінійностей, причому цей резулькожен внутрішній контур підпорядкований тат повинен досягатися в класі безперервних кевідповідному зовнішньому. Від показників якості рувань і при кінцевих коефіцієнтах передачі в динаміки електропривода багато в чому залежить контурі координатного зворотного зв'язку, що і є продуктивність машин для термічного різання і оптимальним рішенням сформульованої вище якість продукції, що випускається ними. Істотними задачі. факторами, що визначають динамічні властивості Поставлена задача вирішується тим, що в електроприводів, є нестаціонарність слідкуючий електропривод подач верстатів з ЧПУ, (нестабільність) їхніх параметрів і зовнішніх що містить силову частину у вигляді двигуна впливів, наявність нелинійностей і пружних ланок. постійного струму з незалежним збудженням, До цих факторів потрібно віднести і труднощі зв'язаного, з одного боку, через редуктор з викоодержання початкової інформації про значення навчим механізмом, а з іншого боку - з датчиками параметрів, а також можливість їхньої зміни в швидкості і положення, що одержує живлення від процесі модернізації і ремонту. Наявність, наприктранзисторного перетворювача, і регулюючу часлад, зазорів і пружних ланок у системі електротину, що містить зовнішній контур регулювання привода з ЧПУ приводить до появи різного роду положення, який складається з контуру швидкості, механічних коливань. Цікаво відзначити, що датчика положення, першого суматора, один вхід демпфірування (компенсація) пружних коливань за якого підключений до виходу ЧПУ, а другий - до рахунок автоматизованого електропривода звивиходу датчика положення, і П-регулятор полочайно зводиться до необхідності одночасного зниження, вхід якого з'єднаний з виходом першого ження динамічних коефіцієнтів підсилення суматора, при цьому вихід останнього регуляторів швидкості р.с. і струму р.т. у такому підключений до одного з входів другого суматора, степені, щоб резонансні сплески амплітудної внутрішнього контуру швидкості, що включає в частотної характеристики не заходили в заборонну себе контур струму, другий суматор, віднімаючий зону. При перенастроюванні регуляторів вхід якого з'єднаний з виходом датчика швидкості, реалізована частота пропускання контуру полоі ПІ-регулятор швидкості, підключений входом до ження принципово залишається значно нижче виходу другого суматора, вихід якого підключений області частот механічного резонансу, тобто значдо першого входу третього суматора, підлеглий но знижується добротність слідкуючої системи і контур струму, що включає в себе третій суматор, недовикористовуються динамічні властивості судругий вхід якого з'єднаний з датчиком струму, 5 74967 6 датчик струму і регулятор струму, підключений ланки самонастроювання в силу обмеженості ревходом до виходу третього суматора, вихід якого сурсу керування в реальних системах. Вихідний з'єднаний із транзисторним перетворювачем насигнал додаткового контуру просто обчислюється пруги, і вимірювально-перетворювальний за значеннями вимірюваних змінних з , ист , , пристрій, що складається з датчиків струму, ія . Отже, використання додаткового контуру швидкості і положення, згідно з винаходом додатдозволяє цілком вирішити задачі придушення збуково введено контур, що містить підсумовуючий рювань і дрейфу параметрів, забезпечити підсилювач, з'єднаний з виходами ЧПУ, датчиків рівномірність руху в регульованому режимі, положення і швидкості, четвертий суматор, пераперіодичний характер перехідного процесу при ший вхід якого з'єднаний з виходом позиціюванні робочого органа і високу точність підсумовуючого підсилювача, другий вхід спостереження при відтворенні програми в режимі підключений до виходу датчика струму, і контурної обробки. У результаті в контурі полопідсилювач з коефіцієнтом підсилення k, вхід якого ження забезпечується сполучення суперечливих приєднаний до виходу четвертого суматора, вихід вимог - широка смуги пропуску в контурному якого підключений до третього входу другого сурежимі й аперіодичній характеристиці в режимі матора. Такі нововведення забезпечують примупозиціювання, що дозволяє підвищити точність сове придушення коливань, розширення смуги відтворення лінійних і кругових ділянок, гострих пропуску за область резонансних частот, досягкутів (найбільш складний елемент для спостеренення оптимальної, а якщо необхідно, то граничної ження), виключити вібрацію системи, в тому числі і (з урахуванням ресурсу двигуна) швидкодії і при одночасній роботі обох приводів зі швидкістю, стабільності динамічних характеристик на весь що змінюється. період експлуатації в умовах нестаціонарності і Зажадаємо, щоб динаміка системи по вихідний нелінійності пружнов'язкого електромеханічного змінній (р відповідала сконструйованому об'єкта. Введення нового типу зворотного зв'язку диференціальному рівнянню орієнтовано на подолання того або іншого виду невизначеності в поводженні об'єкта. Зміст уве * a1 * a * a0 з , ( a 0 , a1 0 ) дення додаткового контуру полягає в наступному. де з - запропоноване значення вихідної По-перше, тільки старша похідна регульованої змінної; a 0 , a1 - постійні параметри, вибором яких величини явно залежить від керуючого впливу, тобто може бути змінена в потрібному напрямку. визначається вид траєкторії * ( t ) . Тут * - проПо-друге, усі збурювання на виході системи награмне значення другої похідної регульованої весамперед виявляються в зміні старшої похідної личини - є впливом, що задає. Величина e * вихідної координати. Очевидно, що якщо увесь визначить відхилення фактичного поводження від час підтримувати необхідний закон зміни старшій бажаного Для компенсації цієї e(t ) 0 . похідній, то сама вихідна координата буде неузгодженості організуємо за допомогою принцизмінюватися за заданим законом. Принципові пу регулювання по відхиленню зворотний зв'язок труднощі при цьому зв'язани з можливістю ( t ) k e( t ) , розв'язання рівняння руху щодо керування на класі припустимих керувань. У нашому випадку де k - коефіцієнт підсилення, обумовлений з функція керування, що дозволяє, існує і легко умов забезпечення заданої помилки в статиці і будується. При цьому вирішується не тільки зададинаміці. ча оптимізації програмного руху з заданою якістю Сформуємо програмне значення * в такий (заздалегідь запропонований характер спосіб: перехідного процесу), але і задача термінального ) a1 . a0 ( з керування, тобто задача керування кінцевим стаДля реалізації керування виникає необхідність ном. Більш того, введення додаткового каналу по у багаторазовому диференціюванні сигналу, що відхиленню старшої похідної від бажаного значенспостерігається. Одержання точних значень ня дозволяє за рахунок більш ефективного викопохідних утруднено через випадкові збурювання, ристання ресурсів керування компенсувати пружні шуми у спостереженнях, апаратурні шуми. Однак, коливання і забезпечити в електроприводі малу маючи на увазі, що момент двигуна пропорційний чутливість до зміни параметричних і сигнальних току в якірному ланцюзі, значення другої похідної збурювань у широких межах. Таким чином, додатвід кута повороту може бути отримано непрямими ковий контур регулювання підвищує запаси вимірами з наступним обчисленням, не прибігаючи стійкості і забезпечує оптимальне, а якщо до двократного диференціювання. При відомих необхідно, то граничну швидкодію системи в умопараметрах двигуна друга похідна від кута пововах зміни параметрів і характеристик роту може бути обчислена з точністю до величини електромеханічного об'єкта, усуває пружні колимоменту опору, якщо вимірити струм якоря. Це вання. Цікаво відзначити, що для побудови додаткового контуру регулювання не потрібно точного означає, що d2 / dt 2 може бути оцінена за допознання моделі об'єкта. Відпадає і необхідність могою пропорційної ланки, якщо на його вхід виміру другої похідної регульованої величини. подається безпосередньо обмірювана величина Більш того, можна показати, що необхідний рух у струму якоря iя . Помітимо, що вимір струму є досистемі з додатковим контуром керування сить простою з технічної точки зору задачею. Тезабезпечується за допомогою кінцевих керувань, пер визначаємо сигнал впливу навіть при k . Це виявляється вирішальним ( t ) k [a0 ( з ) a1 a2iя ] фактором при виборі й обґрунтуванні аналітичної 7 74967 8 і замикаємо вихід контуру на вхід ПІчення кута повороту вала виконавчого двигуна регулятора швидкості. Ступінь наближення ист і формуючий сигнал завдання для РП, П(t) * ( t ) тим вища, чим більший коефіцієнт регулятор положення 8, що виробляє задане знапідсилення k. Використання додаткового зворотночення швидкості, другий обчислювач го зв'язку дозволяє побудувати замкнуту систему з неузгодженості 9, що формує сигнал різниці задарухами, що не залежать в асимптотиці від зміни в ного програмою керування значення швидкості й широких межах параметрів об'єкта і неконтрольовідслідкованого значення від елемента зворотного ваних зовнішніх збурювань. Коефіцієнти a 0 , a1 зв'язку 4 і подає його на вхід РШ, регулятор швидкості 10, що реалізує пропорційновизначаються з умови, щоб динаміка еталонної інтегральний закон регулювання виконавчого двисистеми відповідала бажаній динаміці гуна, третій елемент порівняння 11, що формує синтезованої замкнутої системи. Як правило, при сигнал різниці заданого і поточного значення проектуванні системи виявляється можливим приструму ія і падає його на вхід PC. ПІ-регулятор значити тривалість перехідних процесів tp * при струму 12, який впливає на транзисторний перевідпрацьовуванні постійних впливів, а також указатворювач 6 і вимірювально - перетворювальний ти характеристики перехідного процесу: перерегупристрій, що представляє собою датчики струму лювання , показник коливальності і ін. За ци13, швидкості 4 і положення 5. Регулюючий блок ми даними можна визначити шукані коефіцієнти містить додатковий контур, що складається з блоa 0 , a1 . ку формування бажаного значення другої похідної Як відзначалося вище, у контурі положення кута повороту вала, побудованого на необхідно забезпечити сполучення суперечливих підсумовуючому підсилювачі 14, на входи якого вимог - широку смугу пропускання (високу точність подають сигнали, пропорційні з , ист , , сумаспостереження при відтворенні програми) у контора 15, що визначає відхилення поточного знатурному режимі і аперіодичну характеристику в чення другої похідної від необхідного * і режимі позиціювання робочого органу. Виходячи з підсилювача 16 з коефіцієнтом підсилення k, на необхідних динамічних властивостей, запишемо вхід якого подають сигнал з виходу вузла еталонну модель, порядок диференціального порівняння 15, а вихід з'єднаний безпосередньо з рівняння якої не вище другого, у стандартному входом другого суматора 9. вигляді Слідкуючий електропривод подач реалізовано 2 * 2 * * з, відповідно до функціональної схеми, наведеної на малюнку. Блок 14, що виробляє сигнал, який де - постійна часу; - коефіцієнт згасання відповідає стійкому з граничною швидкодією коливань. Порівнюючи останнє рівняння з бажаперехідному процесові в електроприводі при станним, маємо дартному (стрибкоподібному) впливі, реалізований 1 2 a1 2 , a0 . на мікросхемі операційного підсилювача з R - зворотним зв'язком і трьома резисторными входами. 2 / 2 (настроювання на Як відомо, якщо Вимірювач помилки 15, що порівнює сигнали оптимум по модулю), то тривалість перехідного змінної, безпосередньо обмірюваної датчиком * процесу tp 3 , а перерегулювання складає 4,3 струму 13 і еталонним значенням, вироблюваним блоком 14 виконаний на операційному підсилювачі %. Такі характеристики для приводів подач з двома резисторными входами. Далі сигнал з винайбільш кращі. Приймаючи 2 / 2 одержимо ходу формувача помилки 15 надходить на вхід 2 * формувача сигналу корекції 16, що представляє a1 2 1 , a0 , tp / 3 собою безінерційний підсилювач з великим * Отже, по відомій величині tp можна знайти коефіцієнтом підсилення й обмеженням, реалізованим також на мікросхемі операційного шукані коефіцієнти. Потім обчислюється необхідне підсилювача. Інші незгадані зв'язки, показані на значення k, при якому реалізується ця траєкторія функціональній схемі, відповідають (запропонована траєкторія руху). функціональній схемі прототипу. Таким чином, при На кресленні наведено функціональну схему введенні нових блоків 14-16 і відповідних зв'язків пропонованого слідкуючого електропривода подач утвориться додатковий контур, що корегує роботу верстатів з ЧПУ, узяту як приклад конкретної електроприводу. При цьому нові введені блоки і реалізації винаходу. зв'язки забезпечують працездатність пропоноваСлідкуючий електропривод містить у собі синого електроприводу в цілому в умовах змінності лову частину у вигляді двигуна постійного струму 1 параметрів об'єкта і нелінійностей, що розширює з незалежним збудженням, зв'язаного з однієї стообласть застосування пропонованого слідкуючого рони через редуктор 2 з виконавчим механізмом 3, електроприводу. а з іншого боку - з датчиками швидкості 4 і полоСлідкуючий електропривод подач станків з ження 5, що одержує живлення від транзисторного ЧПУ працює в такий спосіб. перетворювача 6, і регулюючу частину, що містить перший елемент порівняння 7, який виділяє велиСигнал керування від ЧПУ з ( t ) разом із сигчину неузгодженості кута, що задається, (полоналом негативного зворотного зв'язку ист ( t ) з ження) з ( t ) (програмний рух з ( t ) формується датчика положення надходять на перший елемент спеціальним програмно-тимчасовим пристроєм, порівняння 7, вихідний сигнал якого надходить на що реалізується на микроЭВМ) і поточного знарегулятор положення 8. За виділеною елементом 9 74967 10 порівняння 7 величиною неузгодженості кута, що Експериментальні дослідження слідкуючого електроприводу подач з контурами струму, задається з ( t ) , і поточного значення кута ист ( t ) швидкості і положення, що мають стандартні наРП видає сигнал завдання швидкості. Сигнал з строювання, при трьох-, п'ятикратній зміні виходу РП і сигнал зворотного зв'язку по швидкості параметрів об'єкта (зміні інерційних мас пружного з датчика швидкості 4 разом надходять на входи об'єкта, параметрів привода), дії статичного й елемента порівняння 9 і далі, сумуючись у ударного навантаження, а також при великих розсуматорі 11 із сигналом з датчика струму 13, - на ладах контурів підлеглого регулювання, що привовхід PC. ПІ-регулятор струму впливає на транзидять типову систему в непрацездатний стан, покасторний перетворювач, навантаженням якого слузали, що підключення нового координатного жить якірний ланцюг виконавчого двигуна. Під дією зворотного зв'язку забезпечує ефективне придуприкладеної напруги в обмотці якоря протікає шення резонансних явищ у приводах подач (при струм ія , що створює разом зі струмом збудження відсутності додаткового контуру спостерігаються електромагнітний момент М, під дією якого якір коливання з частотою 6-8 Гц), більш високу двигуна приходить в обертання і зі швидкістю рівномірність обертання (коефіцієнт нерівномірності зменшується приблизно в 1,5-3 повертає вал двигуна, а разом з ним з'єднану з рази), високу якість регулювання (аперіодичний валом двигуна механічну передачу на кут ист . перехідний процес має задану форму з часом Для лінійних координат відбувається подальше процесів 0,01 с і перерегулюванням 5%, що перетворення обертального руху в поступальне за відповідає смузі пропускання контуру положення допомогою передачі рейка-шестірня. Об'єкт керуне менш 50 Гц). При цьому смуга пропускання вання являє собою механічну пружну систему (заслідкуючої системи подачі станків з ЧПУ при зор-пружність-інерційне навантаження), з'єднану відтворенні програми в режимі контурного через редуктор 2 із двигуном 1, інерційний ротор відпрацьовування розширюється більш ніж у п'ять якого утворює з об'єктом двомасову систему. На разів з 10-15 Гц до 50 Гц і більш. Помітимо, що у вхід вимірника помилки 15 подаються сигнал з вихідній системі регулювання закінчується за 0,15виходу підсумовуючого підсилювача 14, що 0,2 с. відповідає бажаному значенню другої похідної Таким чином, застосування нового регульованої (вихідний) змінної, і сигнал з виходу слідкуючого електроприводу подач забезпечує датчика струму 13. Сформований суматором 15 придушення вібрації, найвищу динамічну реакцію, сигнал помилки, що дорівнює різниці других надшвидкодіюче позиціювання, досягнення похідних вихідної змінної і бажаного значення чемаксимальної продуктивності і точності вирізання рез підсилювач 16 з коефіцієнтом передачі k заготівок. Слідкуючій електропривод з новим тивпливає на вхід суматора 9 і далі на об'єкт, припом координатного зворотного зв'язку є кращим душуючи примусовим чином його пружні коливандля додатків з високими швидкостями ня за допомогою електродвигуна. При цьому позиціювання. Слід зазначити і простоту схемного забезпечується стійкий рух об'єкта зі смугою прорішення. Воно базується на двох операційних пуску, що перекриває область резонансних частот. підсилювачах з одним основним регулюванням Таким чином, блоки 14-16 утворюють додатковий коефіцієнта підсилення контуру прискорення. Досзовнішній контур керування по різниці других татня для практики степінь наближення * похідних бажаного і дійсного значення вихідної досягається при помірних значеннях коефіцієнта змінної системи, а вибором коефіцієнта k підсилення. Якщо в системі призначити, наприкзабезпечується стійкість роботи і граничне, з уралад, k = 8, то при зміні параметрів керованого хуванням обмеження ресурсу виконавчого об'єкта в широких межах динамічні властивості механізму, швидкодія, що перекриває область системи будуть зберігатися практично без змін. резонансних частот. Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11 74967 12
ДивитисяДодаткова інформація
Назва патенту англійськоюServo drive for machines with numerical programmed control
Автори англійськоюVereschaho Yevhen Mykolaiovych, Kvasnytskyi Viacheslav Fedorovych, Romanovskyi Heorhii Fedorovych
Назва патенту російськоюСледящий электропривод для станков с числовым программным управлением
Автори російськоюВерещаго Евгений Николаевич, Квасницкий Вячеслав Федорович, Романовский Георгий Федорович
МПК / Мітки
МПК: G05B 11/01, G05B 13/00
Мітки: електропривід, чпу, верстатів, слідкуючий
Код посилання
<a href="https://ua.patents.su/6-74967-slidkuyuchijj-elektroprivid-verstativ-z-chpu.html" target="_blank" rel="follow" title="База патентів України">Слідкуючий електропривід верстатів з чпу</a>
Слідкуючий електропривід зі змінним моментом інерції

Номер патенту: 36098
Опубліковано: 16.04.2001
Автори: Пекеліс Дмитро Аркадійович, Балін Генадій Миколайович, Аркадьєв Віктор Юрійович, Боярчук Володимир Петрович, Лебеденко Юрій Олександрович
МПК: G05B 11/01, G05B 13/02
Мітки: інерції, слідкуючий, електропривід, змінним, моментом
Текст:
...зміна сигналу з виходу функціонального регулятора 12, що еквівалентно зміні параметрів самоналагоджуваного регулятору 9 швидкості. Сигнал джерела 14 опорного струму, пропорційний статичному струму ІС електродвигуна, й дат чика 7 струму якорю ІЯ, електродвигуна 2, просумовані суматором 15, формують на його виході сигнал динамічного моменту електроприводу Мдин Сm(ІЯ-ІС), де Сm - конструктивна постійна еле= ктродвигуна, яка установлює...
Електропривід з релейним керуванням
Номер патенту: 31224
Опубліковано: 15.12.2000
Автори: Казачковський Микола Миколайович, Савченко Сергій Борисович
МПК: H02P 7/06
Мітки: релейним, керуванням, електропривід
Текст:
...зг єднаний з виходом другого суматора, перший вхід якого підключений до виходу давача струму, другий вхід - до виходу давача напруги, третій вхід - до виходу третього блока диференціювання, п' ятнй вхід - до виходу задавача мінімальної напруги силового фільтра, вихід блока виділення модуля з' єднаний з входом третього блока диференціювання та з четвертям входом другого суматора, а ного вхід підключений до виходу третього суматора,...
Електропривід змінного струму
Номер патенту: 63254
Опубліковано: 15.01.2004
Автори: Скурятін Юрій Васильович, Самчелєєв Юрій Павлович, Карпук Ігор Анатолійович, Шевченко Іван Степанович
Мітки: змінного, струму, електропривід
Формула / Реферат:
Електропривід змінного струму, до складу якого входить асинхронний електродвигун з фазним ротором, обмотка статора якого підключена до мережі, виводи обмотки ротора з’єднані з трифазним входом першого мостового випрямляча, катодна група вентилів якого з’єднана з анодною групою вентилів другого мостового випрямляча, який відрізняється тим, що другий мостовий випрямляч виконаний на повністю керованих вентилях, при цьому анодна група вентилів...
Слідкуючий електрогідравлічний привід
Номер патенту: 69128
Опубліковано: 16.08.2004
Автори: Фірсов Сергій Миколайович, Нарожний Віталій Васильович, Гісцова Тетяна Іванівна, Лученко Олег Олексійович, Кулік Анатолій Степанович
МПК: F15B 9/00
Мітки: електрогідравлічний, привід, слідкуючий
Формула / Реферат:
Слідкуючий електрогідравлічний привід, що складається з гідравлічно з'єднаних реверсивно регульованого насоса і виконавчого гідроциліндра з датчиком положення його штока, підключеним через суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака і клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика сили споживаного струму і обмежника-формувача, який...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Таран Олександр Миколайович, Нарожний Віталій Васильович, Лученко Олег Олексійович
МПК: F15B 9/00
Мітки: електрогідравлічний, привід, слідкуючий
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...