Адаптивна система керування
Номер патенту: 75879
Опубліковано: 10.12.2012
Автори: Тєут Василь Михайлович, Олійник Павло Борисович, Іванов Сергій Вікторович

Формула / Реферат
Адаптивна система автоматичного керування, що містить задавальний пристрій, перший суматор, до виходу якого підключено адаптивний регулятор, вихід регулятора приєднано до першого входу об'єкта керування, на який діє збурення і з яким послідовно з'єднано датчик вихідного сигналу об'єкта керування, вихід датчика вихідного сигналу приєднано до інверсного входу першого суматора, яка відрізняється тим, що містить другий суматор, неінвертуючий вхід якого приєднано до виходу здавального пристрою, а вихід - до неінвертуючого входу першого суматора, та блок ідентифікації, перший вхід якого приєднано до виходу датчика вихідного сигналу об'єкта керування, другий вхід - до виходу задавального пристрою, перший вихід приєднано до другого входу регулятора, а другий - до інвертуючого входу другого суматора.
Текст
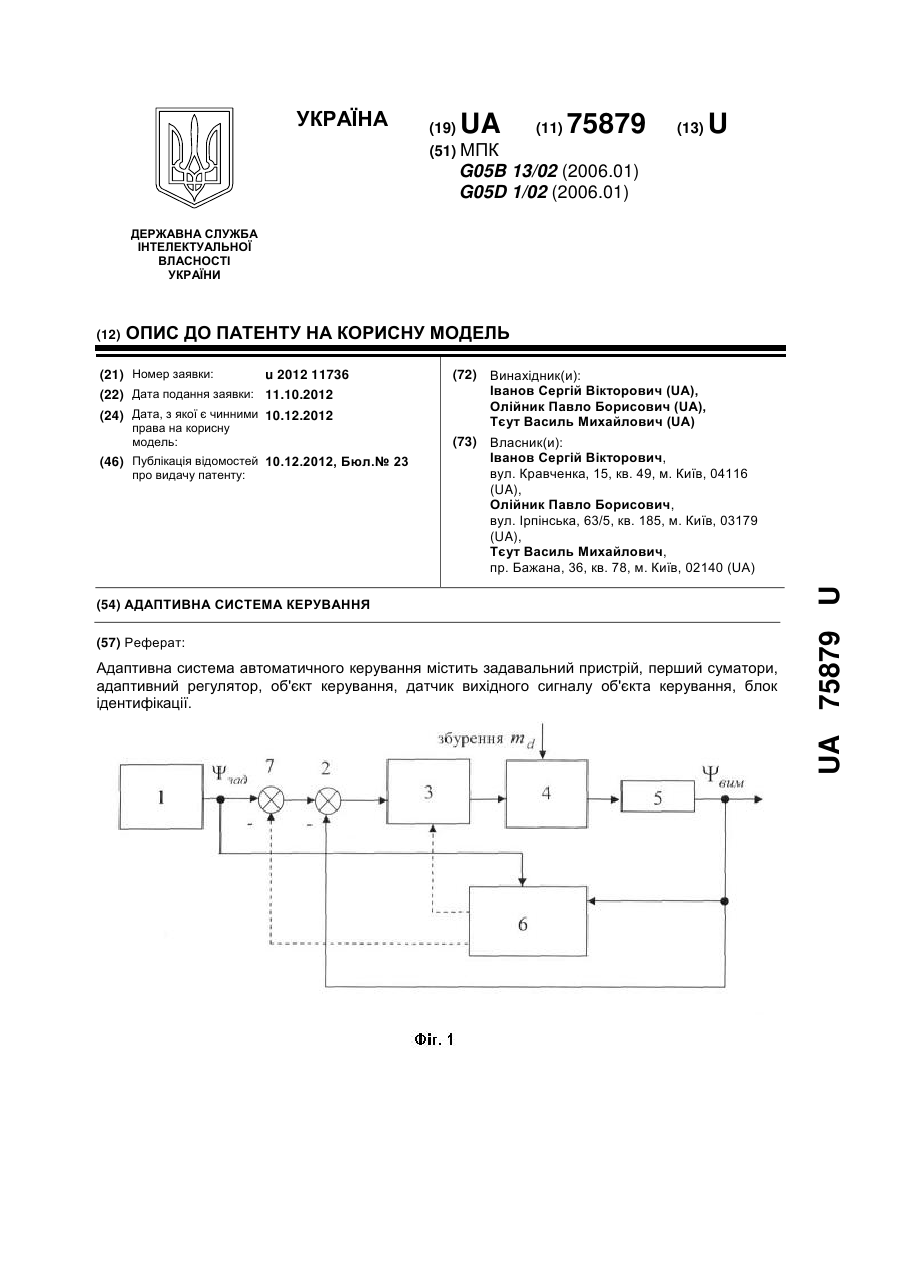
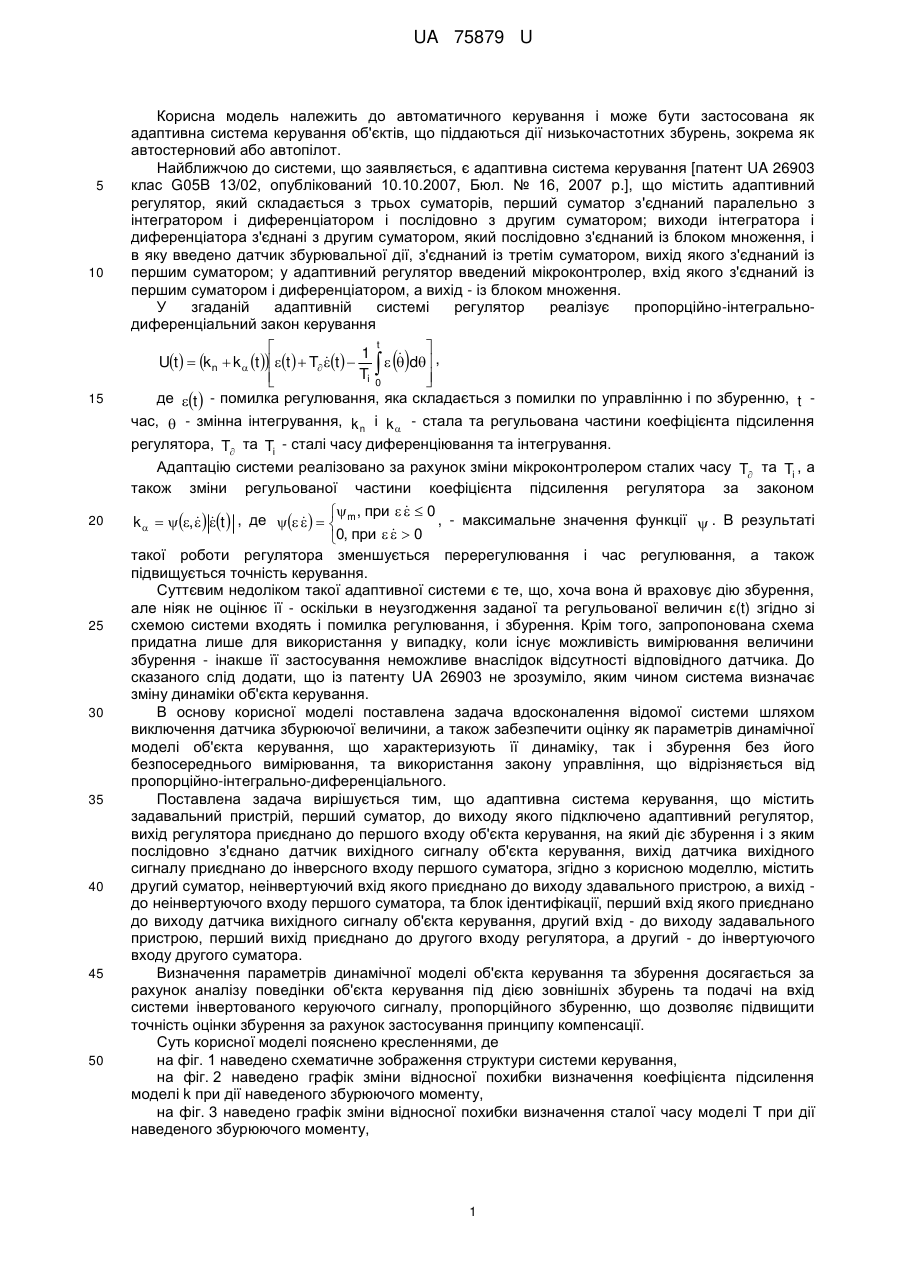
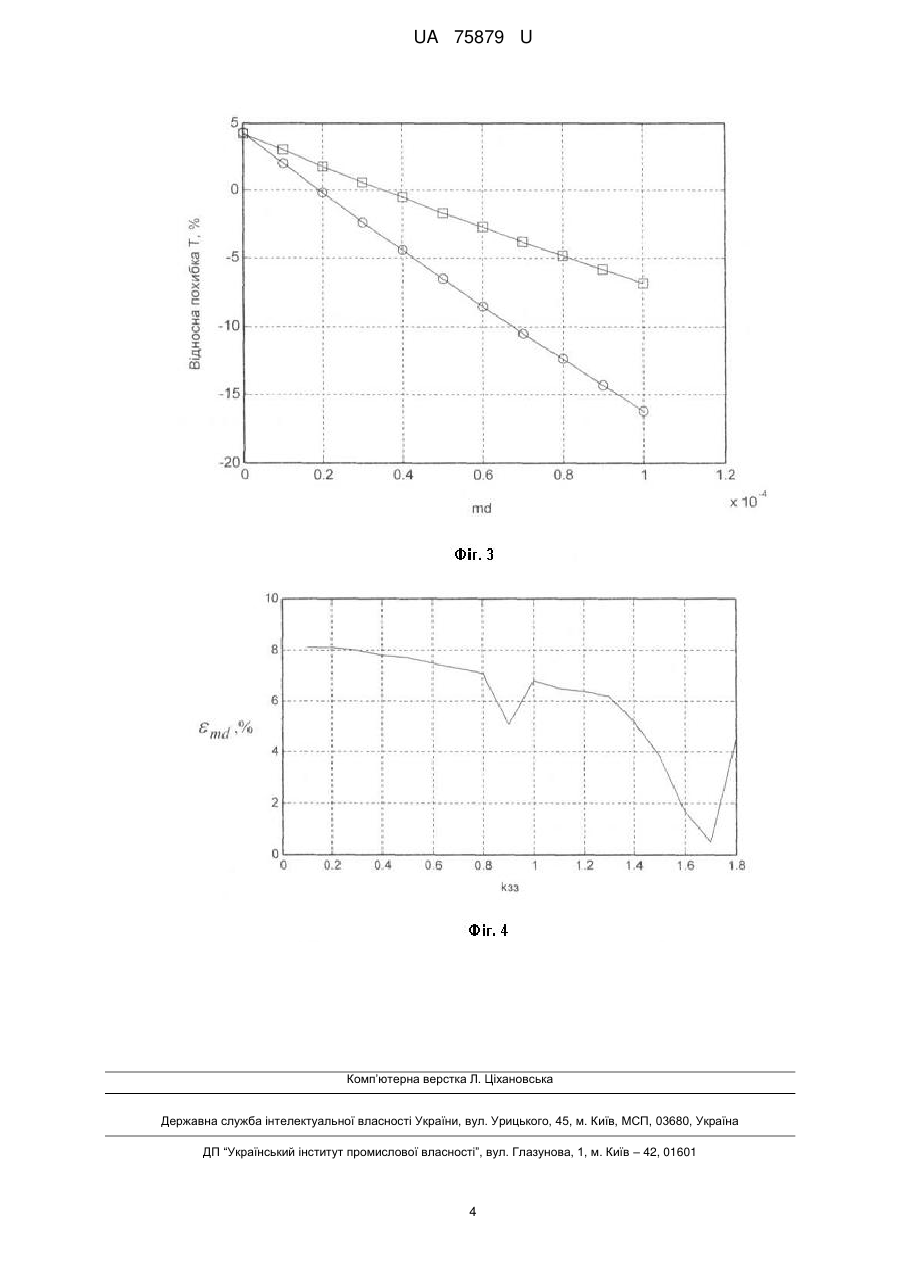
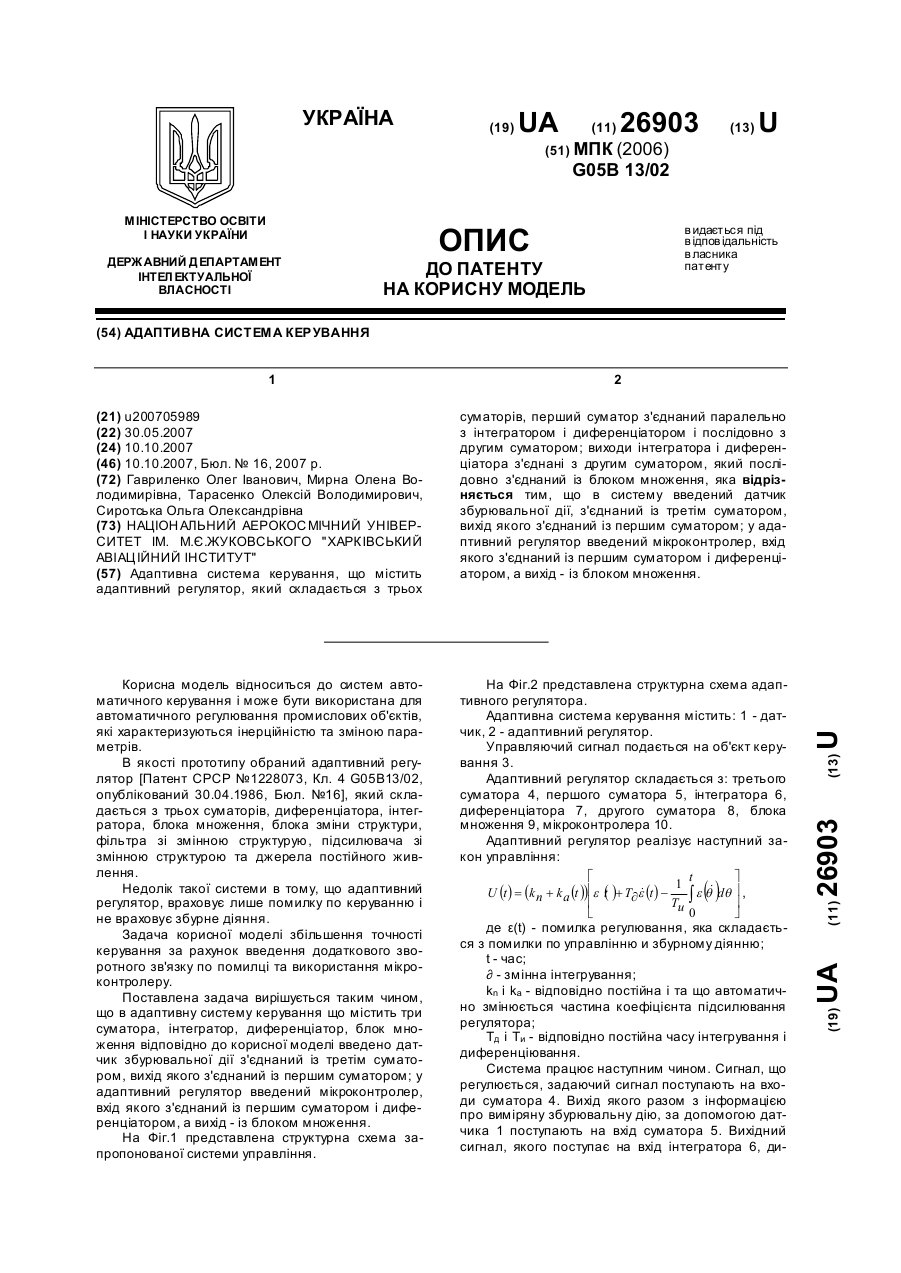
Реферат: Адаптивна система автоматичного керування містить задавальний пристрій, перший суматори, адаптивний регулятор, об'єкт керування, датчик вихідного сигналу об'єкта керування, блок ідентифікації. UA 75879 U (12) UA 75879 U UA 75879 U 5 10 Корисна модель належить до автоматичного керування і може бути застосована як адаптивна система керування об'єктів, що піддаються дії низькочастотних збурень, зокрема як автостерновий або автопілот. Найближчою до системи, що заявляється, є адаптивна система керування [патент UA 26903 клас G05B 13/02, опублікований 10.10.2007, Бюл. № 16, 2007 p.], що містить адаптивний регулятор, який складається з трьох суматорів, перший суматор з'єднаний паралельно з інтегратором і диференціатором і послідовно з другим суматором; виходи інтегратора і диференціатора з'єднані з другим суматором, який послідовно з'єднаний із блоком множення, і в яку введено датчик збурювальної дії, з'єднаний із третім суматором, вихід якого з'єднаний із першим суматором; у адаптивний регулятор введений мікроконтролер, вхід якого з'єднаний із першим суматором і диференціатором, а вихід - із блоком множення. У згаданій адаптивній системі регулятор реалізує пропорційно-інтегральнодиференціальний закон керування t 1 Ut k n k t t T t d , Ti 0 де t - помилка регулювання, яка складається з помилки по управлінню і по збуренню, t час, - змінна інтегрування, k n і k - стала та регульована частини коефіцієнта підсилення регулятора, T та Ti - сталі часу диференціювання та інтегрування. 15 20 25 30 35 40 45 50 Адаптацію системи реалізовано за рахунок зміни мікроконтролером сталих часу T та Ti , а також зміни регульованої частини коефіцієнта підсилення регулятора за законом , при 0 , - максимальне значення функції . В результаті k , t , де m 0, при 0 такої роботи регулятора зменшується перерегулювання і час регулювання, а також підвищується точність керування. Суттєвим недоліком такої адаптивної системи є те, що, хоча вона й враховує дію збурення, але ніяк не оцінює її - оскільки в неузгодження заданої та регульованої величин ε(t) згідно зі схемою системи входять і помилка регулювання, і збурення. Крім того, запропонована схема придатна лише для використання у випадку, коли існує можливість вимірювання величини збурення - інакше її застосування неможливе внаслідок відсутності відповідного датчика. До сказаного слід додати, що із патенту UA 26903 не зрозуміло, яким чином система визначає зміну динаміки об'єкта керування. В основу корисної моделі поставлена задача вдосконалення відомої системи шляхом виключення датчика збурюючої величини, а також забезпечити оцінку як параметрів динамічної моделі об'єкта керування, що характеризують її динаміку, так і збурення без його безпосереднього вимірювання, та використання закону управління, що відрізняється від пропорційно-інтегрально-диференціального. Поставлена задача вирішується тим, що адаптивна система керування, що містить задавальний пристрій, перший суматор, до виходу якого підключено адаптивний регулятор, вихід регулятора приєднано до першого входу об'єкта керування, на який діє збурення і з яким послідовно з'єднано датчик вихідного сигналу об'єкта керування, вихід датчика вихідного сигналу приєднано до інверсного входу першого суматора, згідно з корисною моделлю, містить другий суматор, неінвертуючий вхід якого приєднано до виходу здавального пристрою, а вихід до неінвертуючого входу першого суматора, та блок ідентифікації, перший вхід якого приєднано до виходу датчика вихідного сигналу об'єкта керування, другий вхід - до виходу задавального пристрою, перший вихід приєднано до другого входу регулятора, а другий - до інвертуючого входу другого суматора. Визначення параметрів динамічної моделі об'єкта керування та збурення досягається за рахунок аналізу поведінки об'єкта керування під дією зовнішніх збурень та подачі на вхід системи інвертованого керуючого сигналу, пропорційного збуренню, що дозволяє підвищити точність оцінки збурення за рахунок застосування принципу компенсації. Суть корисної моделі пояснено кресленнями, де на фіг. 1 наведено схематичне зображення структури системи керування, на фіг. 2 наведено графік зміни відносної похибки визначення коефіцієнта підсилення моделі k при дії наведеного збурюючого моменту, на фіг. 3 наведено графік зміни відносної похибки визначення сталої часу моделі Т при дії наведеного збурюючого моменту, 1 UA 75879 U 5 10 15 20 25 30 35 40 45 50 55 на фіг. 4 наведено залежність відносної похибки md оцінки збурюючого моменту mdo на основі оцінок md , розрахованих системою, від значення коефіцієнта зворотного зв'язку k зз . ˆ Як показано на фіг. 1, до виходу задавального пристрою 1 приєднано послідовно з'єднані з використанням неінвертуючих входів другий суматор 7 і перший суматор 2, до виходу якого підключено адаптивний регулятор 3. Вихід регулятора 3 приєднано до першого входу об'єкта керування 4, на який діє збурення і з яким послідовно з'єднано датчик вихідного сигналу об'єкта керування 5. Сигнал з виходу датчика вихідного сигналу 5 приєднано до інвертуючого входу першого суматора 2. Перший вихід блока ідентифікації 6 приєднано до виходу датчика вихідного сигналу об'єкта керування 5, другий вхід - до виходу задавального пристрою 1, перший вихід блока ідентифікації приєднано до другого входу регулятора 3, а другий - до інвертуючого входу другого суматора 7. Система працює наступним чином. В режимі переходу до нового значення величини при сталих характеристиках об'єкта керування блок ідентифікації не працює. Вмикання та вимикання блока ідентифікації виконується за даними заданого Ψзад та виміряного Ψвим значення вихідної величини об'єкта керування, отриманих з задавального пристрою. В режимі підтримання заданого значення вихідної величини об'єкта керування Ψзад блок ідентифікації працює постійно. При цьому, оскільки судно весь час перебуває під дією зовнішніх збурень, для компенсації яких доводиться перекладати стерно, його траєкторія має вид зигзагу. Якщо неузгодженість заданого та виміряного значень Ψзад - Ψвим при роботі системи керування не перевищує за модулем певну, наперед задану величину, ідентифікація не виконується; інакше блок ідентифікації оцінює параметри моделі судна та зовнішнього збурення, і при зміні їх на величину, більшу певного, наприклад заданого судноводієм або пілотом значення, проводить корекцію параметрів регулятора. Для підвищення точності оцінки величини збурення на інвертуючий вхід другого суматора з блока ідентифікації подається величина, пропорційна оцінці збурення, що компенсує дію збурення на об'єкт керування, за допомогою чого підвищується точність визначення величини збурення. Розглянемо приклад реалізації системи керування для використання як автостернового. Як модель судна вибрано модель Номото першого порядку, методику ідентифікації описано в статті: Іванов С.В., Олійник П.Б., Тєут В.М. Автоматична ідентифікація параметрів судна // Системи управління, навігації та зв'язку, № 4 (16), 2010 - с. 6-11. Для підвищення точності визначення параметрів системи в умовах дії збурюючого моменту крім звичайної керуючої дії u , на вхід привода додатково через аперіодичну ланку, що входить до складу блока ідентифікації зі сталою часу 100 с (приблизно рівна періоду зигзагу) подано сигнал оцінки збурюючого моменту. Коефіцієнт підсилення підсилювача після аперіодичної ˆ ˆ ˆ ланки вибрано за формулою K кор k оз T , де T і k - оцінки сталої часу і коефіцієнта передачі ˆ k судна відповідно, а k оз - коефіцієнт зворотного зв'язку, при моделюванні k оз 1 . Разова вибірка даних складається з 32768 точок, тривалість набору даних однієї вибірки ≈ 330 с (три періоди зигзагу). Результати визначення параметрів моделі судна у випадку відсутності та застосування зворотного зв'язку наведено на Фіг. 2 і 3 (○ - без зворотного зв'язку, □ - зі зворотним зв'язком). Як видно з Фіг. 2 і 3, застосування зворотного зв'язку дозволяє зменшити похибку визначення сталої часу та коефіцієнта передачі приблизно вдвічі. Крім того, таке зменшення похибки дозволяє розширити динамічний діапазон збурюючих моментів, за яких оцінка параметрів моделі судна за розробленою методикою дає прийнятну похибку. Дійсне значення збурюючого моменту mdo можна оцінити за формулою mdo md 1 k зз . ˆ Залежність відносної похибки md md mdo / md 100 % оцінки збурюючого моменту mdo на основі оцінок md , розрахованих системою, від значення коефіцієнта зворотного зв'язку k зз ˆ наведено на Фіг. 4. Як видно з Фіг. 4, похибка оцінки mdo не перевищує 8,1 %. Прийнятність такої похибки оцінки збурюючого моменту для практичних цілей слід оцінювати в кожному випадку окремо. Технічний результат використання корисної моделі полягає в тому, що використання запропонованої системи дозволяє проводити ідентифікацію параметрів моделі судна та збурення з меншою похибкою і, відповідно, більш гнучко налаштовувати регулятор. 2 UA 75879 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Адаптивна система автоматичного керування, що містить задавальний пристрій, перший суматор, до виходу якого підключено адаптивний регулятор, вихід регулятора приєднано до першого входу об'єкта керування, на який діє збурення і з яким послідовно з'єднано датчик вихідного сигналу об'єкта керування, вихід датчика вихідного сигналу приєднано до інверсного входу першого суматора, яка відрізняється тим, що містить другий суматор, неінвертуючий вхід якого приєднано до виходу здавального пристрою, а вихід - до неінвертуючого входу першого суматора, та блок ідентифікації, перший вхід якого приєднано до виходу датчика вихідного сигналу об'єкта керування, другий вхід - до виходу задавального пристрою, перший вихід приєднано до другого входу регулятора, а другий - до інвертуючого входу другого суматора. 3 UA 75879 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive control system
Автори англійськоюIvanov Serhii Viktorovych, Oliinyk Pavlo Borysovych, Tieut Vasyl Mykhailovych
Назва патенту російськоюАдаптивная система управления
Автори російськоюИванов Сергей Викторович, Олейник Павел Борисович, Теут Василий Михайлович
МПК / Мітки
МПК: G05B 13/02, G05D 1/02
Мітки: система, адаптивна, керування
Код посилання
<a href="https://ua.patents.su/6-75879-adaptivna-sistema-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система керування</a>
Адаптивна система керування
Номер патенту: 26903
Опубліковано: 10.10.2007
Автори: Сиротська Ольга Олександрівна, Мирна Олена Володимирівна, Тарасенко Олексій Володимирович, Гавриленко Олег Іванович
МПК: G05B 13/02
Мітки: керування, адаптивна, система
Формула / Реферат:
Адаптивна система керування, що містить адаптивний регулятор, який складається з трьох суматорів, перший суматор з'єднаний паралельно з інтегратором і диференціатором і послідовно з другим суматором; виходи інтегратора і диференціатора з'єднані з другим суматором, який послідовно з'єднаний із блоком множення, яка відрізняється тим, що в систему введений датчик збурювальної дії, з'єднаний із третім суматором, вихід якого з'єднаний із першим...
Адаптивна нелінійна система управління
Номер патенту: 44723
Опубліковано: 12.10.2009
Автори: Дибська Ирина Юріївна, Шпак Ганна Сергіївна, Бандура Іван Миколайович
МПК: G05B 13/00
Мітки: управління, нелінійна, адаптивна, система
Формула / Реферат:
Адаптивна нелінійна система управління, що містить перший помножувач, вихід якого з'єднаний через паралельно включені диференціатор, інтегратор і підсилювач з входами першого суматора, а вихід якого підключений до першого входу другого помножувача, вихідний сигнал з цього помножувача сполучений з першим входом другого суматора, вихід якого з'єднаний через регулятор з входом об'єкта управління, вихід якого підключений до першого входу першого...
Система керування
Номер патенту: 59845
Опубліковано: 15.09.2003
Автори: Ткачук Денис Ярославович, Жиляков Віктор Іванович, Дрючин Віктор Гаврилович
МПК: G05B 13/00
Формула / Реферат:
Система керування, що містить об'єкт керування, що складається з n послідовно з'єднаних інерційних ланок, модель об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а виходом, що віднімає, - до виходу об'єкта керування, зворотну модель об'єкта керування, два підсилювачі, яка відрізняється тим, що на вхід, що підсумовує, першого підсилювача надходить сигнал завдання, а n його...
Система керування нестаціонарним нелінійним об’єктом
Номер патенту: 45234
Опубліковано: 26.10.2009
Автори: Тарасова Аліна Сергіївна, Дибська Ирина Юріївна, Бандура Іван Миколайович
МПК: G05B 13/00
Мітки: система, об'єктом, керування, нелінійним, нестаціонарним
Формула / Реферат:
Система керування нестаціонарним нелінійним об'єктом, що містить два суматори, яка відрізняється тим, що в неї введені спостерігач стану по керуванню, вихід якого сполучений з першим входом третього суматора, другий вхід якого з'єднаний з виходом спостерігача стану вихідного параметра об'єкта керування, причому вихід третього суматора та вихід нестаціонарного нелінійного об'єкта сполучені з четвертим суматором, вихід якого через ітераційний...
Система керування
Номер патенту: 61030
Опубліковано: 15.10.2003
Автори: Жиляков Віктор Іванович, Ткачук Денис Ярославович, Дрючин Віктор Гаврилович
МПК: G05B 13/00
Формула / Реферат:
Система керування, до складу якої входить об'єкт керування, що складається з «n» послідовно з'єднаних інерційних ланок, моделі об'єкта керування, два суматори, перший із яких входом, що підсумовує, підключений до виходу моделі об'єкта керування, а входом, що віднімає, - до виходу об'єкта керування, зворотну модель, релейний елемент, два підсилювачі, яка відрізняється тим, що додатково введені «n+1» квадраторів, інтегратор і блок...
Попередній патент: Плита тирсобетонна оздоблювально-утеплювальна
Наступний патент: Спосіб формування штучного шлунка після гастректомії
Випадковий патент: Електроосмотично-конвективна геліосушарка