Ротаційні ваги-дозатор хозіна в.в.
Формула / Реферат
1. Ротаційні ваги-дозатор, що містять множину окремих транспортних модулів, що зв’язані з механізмом диференційного переміщення їх по колу навкруг вертикальної осі з наявністю ступеня свободи у вертикальному напрямку у зоні зважування, споряджених пристроями, що несуть вантаж, у вигляді спряжених між собою платформ і установлених рухомо на кільцевих напрямних з вимірювальною секцією і взаємодіючих з пристроєм видалення вантажу, розміщеним у зоні розвантаження, які відрізняються тим, що механізм диференційного переміщення окремих транспортних модулів по колу виконаний у вигляді зовнішньої силової передачі, привідний орган якої сполучений поза зоною зважування з зовнішньою циліндричною поверхнею одного з окремих транспортних модулів, і внутрішнього опорного ролика, встановленого по вертикальній осі всередині множини модулів і сполученого з одним з них по його внутрішній циліндричній поверхні.
2. Ваги-дозатор за п. 1, які відрізняються тим, що сполучення платформ між собою виконано у вигляді рухомого з’єднання, що зв’язує дві суміжні платформи.
3. Ваги-дозатор за п. 2, які відрізняються тим, що рухоме з’єднання виконане у вигляді виступів Г-подібної форми, один з яких розташований на нижній частині платформи, а другий - на накладці, що прикріплена до нижньої частини стикованої з нею наступної платформи, і виступи сполучені з лінійним контактом у пазу на нижній частині платформи.
4. Ваги-дозатор за пп. 1-3, які відрізняються тим, що ваги сполучені пристроєм утримування окремих транспортних модулів при переміщенні їх по колу.
5. Ваги-дозатор за п. 4, які відрізняються тим, що пристрій утримування окремих транспортних модулів при переміщенні їх по колу виконаний у вигляді сукупності стяжних струн, один кінець яких закріплений з можливістю регулювання натягу на окремому транспортному модулі, а другий - на вільно підвішеному опорному кільці.
6. Ваги-дозатор за п. 4, які відрізняються тим, що пристрій утримування окремих транспортних модулів при переміщенні їх по колу виконаний у вигляді сукупності пластинчатих ланок, що зв’язують попарно суміжні платформи, і закріплених на них з можливістю вертикального зміщення відносно осі кріплення платформ.
7. Ваги-дозатор за пп. 1-6, які відрізняються тим, що пристрій видалення вантажу з платформи виконаний у вигляді нескінченної стрічки, яка встановлена радіально у вікні вивантаження.
8. Ваги-дозатор за п. 7, які відрізняються тим, що привід нескінченної стрічки сполучений з внутрішнім опорним роликом зовнішньої силової передачі.
9. Ваги-дозатор за пп. 1-7, які відрізняються тим, що внутрішня циліндрична поверхня множини окремих транспортних модулів виконана з зазором холостого ходу внутрішнього опорного ролика у зоні зважування.
10. Ваги-дозатор за пп. 1-8, які відрізняються тим, що зовнішня силова передача виконана у вигляді фрикційної пари, веденим елементом якої є циліндричний корпус окремого транспортного модуля.
11. Ваги-дозатор за п. 9, які відрізняються тим, що фрикційна передача сполучена роликом підпору привідного органа з циліндричним корпусом окремого транспортного модуля.
Текст
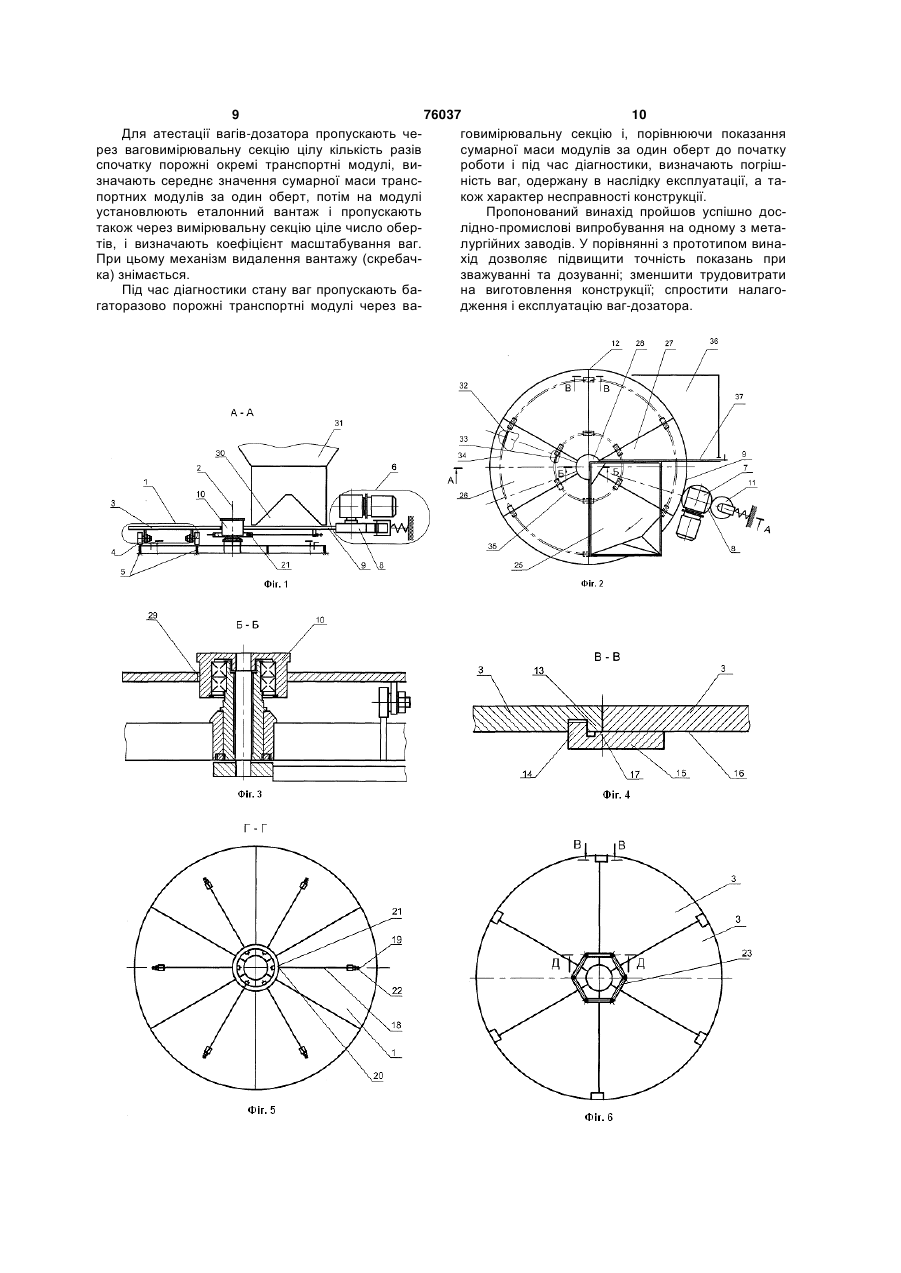
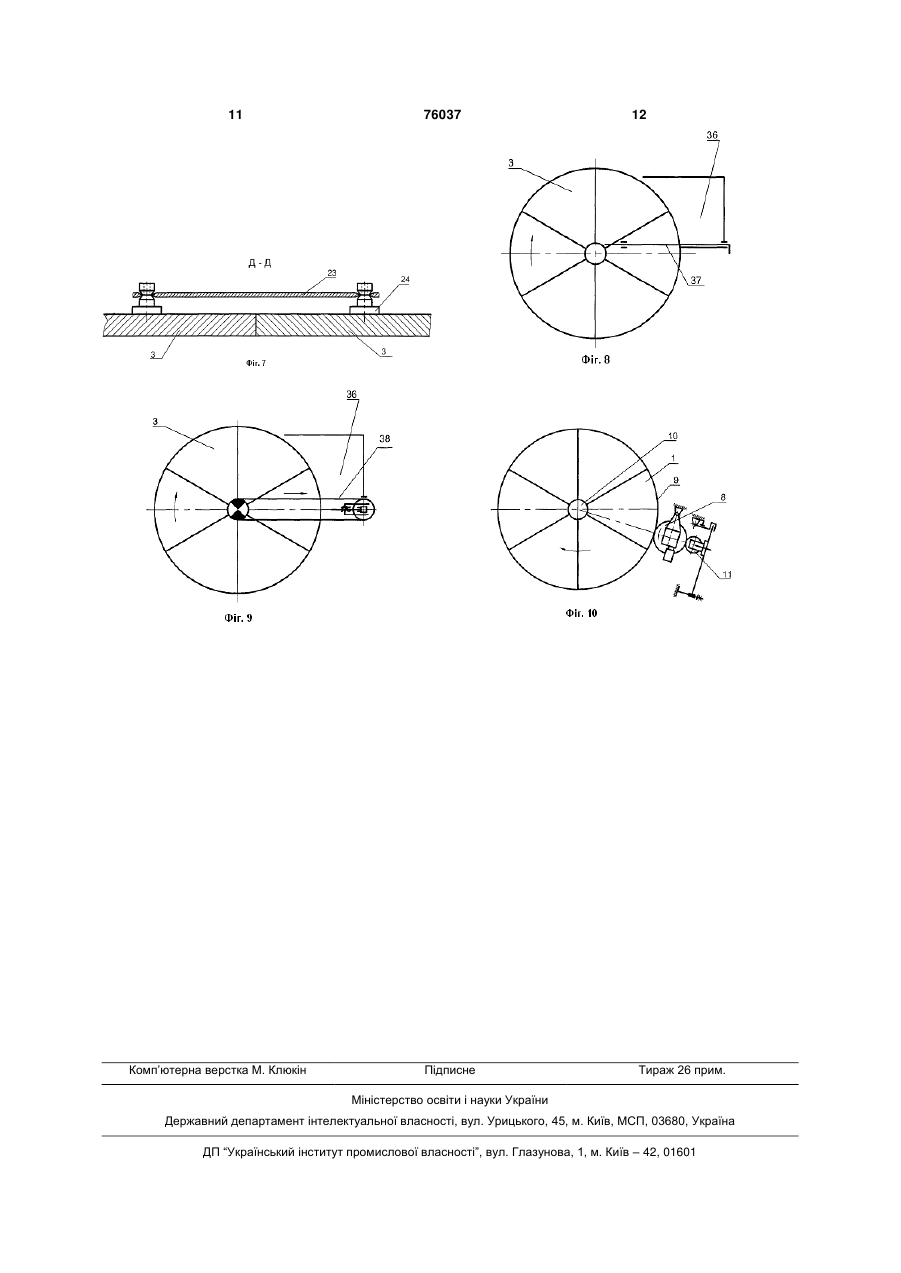
1. Ротаційні ваги-дозатор, що містять множину окремих транспортних модулів, що зв’язані з механізмом диференційного переміщення їх по колу навкруг вертикальної осі з наявністю ступеня свободи у вертикальному напрямку у зоні зважування, споряджених пристроями, що несуть вантаж, у вигляді спряжених між собою платформ і установлених рухомо на кільцевих напрямних з вимірювальною секцією і взаємодіючих з пристроєм видалення вантажу, розміщеним у зоні розвантаження, які відрізняються тим, що механізм диференційного переміщення окремих транспортних модулів по колу виконаний у вигляді зовнішньої силової передачі, привідний орган якої сполучений поза зоною зважування з зовнішньою циліндричною поверхнею одного з окремих транспортних модулів, і внутрішнього опорного ролика, встановленого по вертикальній осі всередині множини модулів і сполученого з одним з них по його внутрішній циліндричній поверхні. 2. Ваги-дозатор за п.1, які відрізняються тим, що сполучення платформ між собою виконано у вигляді рухомого з’єднання, що зв’язує дві суміжні платформи. 3. Ваги-дозатор за п.2, які відрізняються тим, що рухоме з’єднання виконане у вигляді виступів Гподібної форми, один з яких розташований на ни 2 (19) 1 Пропонований винахід відноситься до ваговимірювальної техніки і може бути використований для зважування або дозування різних матеріалів та вантажів, наприклад, піску, цементу, сільськогосподарчої продукції і т.п. Відомі ваги для безперервного зважування сипучих матеріалів, які містять в собі зони завантаження і вивантаження, а також множину вантажоприймальних пристроїв у вигляді секторних відділень, розташованих рівномірно по колу ротора, установленого з можливістю повороту (ротації) навколо вертикальної осі. Ротор охоплений корпусом, який спирається на дві поворотні опори і ваговимірювальний датчик [заявка на патент Великобританії №2127566, 3 МПК, G01G11/00, 1984]. Суттєвою ознакою вище приведеної конструкції ваг є безперервне переміщення і зважування матеріалу по колу - тобто ротація вантажу навколо вертикальної осі. Причому вимір ваги відбувається шляхом реєстрації показань ваговимірювального датчика, які пропорційні масі вантажу у вантажоприймальних пристроях ротора, охопленого корпусом, опертим на дві опори та ваговимірювальний датчик. Розглядена конструкція ваг заснована на схемі посередньої реєстрації ваги при безперервному зважуванні матеріалу. Ваги можуть функціонувати як дозатор при необхідності автоматичного відмірювання визначених порцій (доз) транспортованого вантажу, або підтримування заданої продуктивності. Найбільш близькою по технічній суті і результату, який досягається є конструкція ротаційних ваг Хозіна В.В., які мають зони завантаження, зважування і вивантаження, а також множину окремих транспортних модулів, пов’язаних з механізмом диференційного переміщення їх по колу навколо вертикальної осі з наявністю ступеня свободи у вертикальному напрямку у зоні зважування, які споряджені пристроями, що несуть вантаж, у вигляді спряжених між собою платформ і установлених рухомо на кільцевих напрямних з вимірювальною секцією і взаємодіючих з пристроєм видалення вантажу, що розміщується у зоні вивантаження [заявка на патент України на винахід "Ротаційні ваги Хозіна В.В.", №2004032141 від 23 березня 2004 року]. Ваги можуть функціонувати як дозатор при необхідності автоматичного відмірювання визначених порцій (доз) транспортованого вантажу, або підтримування заданої продуктивності. Відома конструкція ваг відповідно найближчого аналога забезпечує схему прямого зважування вантажу при усуненні впливу тічки матеріалу під час подавання і видалення його з вантажоприймальних пристроїв. Крім цього, має просту технологію атестації або автоматичного діагностування. Механізм диференційного переміщення окремих транспортних модулів по колу навколо вертикальної осі виконано у вигляді повідкового пристрою з горизонтальними штангами, що несуть навантаження, один кінець яких закріплений на привідному диску, а другий споряджений опорними штирями, сполученими з кульковою обоймою, прикріпленою до окремих транспортних модулів. Платформи установлені одним кінцем на рухомих опорах, виконаних у вигляді колеса або ковзуна, а другим спираються на передню частину наступної платформи. Особливістю конструкції ваг найближчого аналога є наявність значних сил тертя у вузлах і деталях сполучення повідків механізму диференційного переміщення з окремими транспортними модулями, що створює додаткові зусилля у зоні зважування, які приводять до зниження точності показань; наявність повідків з вузлами і деталями спряження у відповідності з кількістю окремих транспортних модулів спричиняє до накопичення погрішностей виготовлення та складання, збільшує трудомісткість виготовлення ваг. У зв’язку з цим задачею заявленого винаходу є створення такої конструкції ротаційних вагівдозатора, в якій шляхом усунення ряду вузлів і деталей сполучення механізму диференційного переміщення з окремими транспортними модулями, і, відповідно, зменшення сил тертя при вертикальному зважуванні окремого транспортного модуля досягається новий технічний результат зменшення впливу побічних зусиль на точність зважування; зниження накопичених погрішностей виготовлення та складання; зменшення трудомісткості виготовлення ваг. Для рішення поставленої задачі у відомій конструкції ваг, які мають множину окремих транспортних модулів, пов’язаних з механізмом диференційного переміщення їх по колу навколо вертикальної осі з наявністю ступеня свободи у вертикальному напрямку у зоні зважування, які споряджені пристроями, що несуть вантаж, у вигляді спряжених між собою платформ і установлених рухомо на кільцевих напрямних з вимірювальною секцією, які взаємодіють з пристроєм видалення вантажу, розташованим у зоні вивантаження, - відповідно виноходу, - механізм диференційного переміщення по колу окремих транспортних модулів виконаний у вигляді зовнішньої силової передачі, привідний орган якої сполучений поза зоною зважування з зовнішньою поверхнею одного з окремих транспортних модулів, і внутрішнього опорного ролика, розміщеного по вертикальній осі всередині множини зазначених модулів, і сполученого з одним з окремих транспортних модулів по його внутрішній циліндричній поверхні. Причинно-наслідковий зв'язок поміж новою сукупністю ознак і технічним результатом міститься у наступному. Механізм диференційного переміщення по колу окремих транспортних модулів виконаний без вузлів і деталей сполучення з кожним транспортним модулем, що усуває додаткові сили тертя, зменшує накопичення погрішностей виготовлення та складання, а також трудомісткість виготовлення ваг. Механізм диференційного переміщення винесено поза зону зважування і виконано у вигляді зовнішньої циліндричної передачі, що усуває вплив тічки та вивантаження матеріалу на транспортний модуль, розташований у зоні зважування. Внутрішній опорний ролик у сукупності з приводним органом забезпечують позиціонування модулів на кільцевих напрямних. Кожний з модулів входить послідовно та поперемінне у контакт з 5 76037 6 приводним органом, коли переміщується безпереДля усунення можливих зазорів та забезпервно по колу і проходить зони вивантаження, звачення зчеплення, достатнього для створення нежування та вивантаження матеріалу. обхідного крутильного моменту, фрикційна переДля характеристики важливої суттєвої ознаки дача споряджена роликом підпору приводного пропонованого виноходу введено термін "Мехаоргану до циліндричного корпусу окремого транснізм диференційного переміщення окремих транспортного модуля. портних модулів по колу". У найближчому аналозі Додатковий технічний результат: зменшення цей механізм пропонується у вигляді двох варіанналипання при вивантаженні вологих, липких матів повідкового пристрою; у винаході, що заявлятеріалів; забезпечення збереження у випадку звається, механізм виконано у формі зовнішньої сижування вантажів різних форм та габаритів - досялової передачі і внутрішнього опорного ролика, гається при виконанні пристрою видалення який підпирає окремий транспортний модуль до вантажу у вигляді нескінченної стрічки, що розтаприводного органу у процесі примусового перемішовується радіальне у вікні вивантаження . щення по кільцевим напрямним. При цьому оптимальний варіант виконання Під "диференціацією" розуміється роздільне суміщення приводу нескінченної стрічки з внутрішдіяння приводного механізму на кожний транспорнім опорним роликом зовнішньої силової передачі. тний модуль. Винахід, що пропонується, пояснюється схеУ конструкції ваг найближчого аналога мехаматичним кресленням, на якому показані: нізм диференційного переміщення діє на усі модуФіг.1 - загальний вид пропонованої конструкції лі, у винаході, що заявляється, - послідовно і безротаційних ваг-дозатора, розріз А-А, Фіг.2; перервно на кожний модуль. Фіг.2 - вид зверху на ваги-дозатор; Технічний результат більш ефективний при Фіг.3 - розріз Б-Б, Фіг.2, на якому показана сполученні платформ за допомогою рухомого конструкція внутрішнього опорного ролика у його з'єднання, що поєднує дві суміжні платформи. При сполученні з окремим транспортним модулем; цьому рухоме з'єднання забезпечує як зусилля Фіг.4 - розріз В-В, Фіг.2, виконання рухомого штовхання від приводного органу, так і тягнуче з’єднання між суміжними платформами окремих зусилля на суміжну платформу при переміщенні транспортних модулів; окремого транспортного модуля до зони вивантаФіг.5 - розріз Г-Г, Фіг.1, на якій показано викоження. При цьому рухоме з'єднання дає можлинання пристрою утримання окремих транспортних вість вільного переміщення окремого транспортномодулів у вигляді множини стяжних струн; го модуля у вертикальному напрямку у зоні Фіг.6 - виконання пристрою утримання окремих зважування. Конструктивно кращім є виконання транспортних модулів у вигляді сукупності пластирухомого з'єднання у вигляді виступів Г-образної нчатих ланок; форми, один з яких розташований на нижній часФіг.7 - розріз Д-Д, Фіг.6, конструктивне викотині платформи, а другий - на накладці, що прикрінання попарного зв'язку суміжних платформ; плюється до нижньої частини наступної платфорФіг.8 - виконання пристрою видалення вантами, що стикується з нею, і виступи сполучені з жу у вигляді скребачки; лінійним контактом у пазу на нижній частині платФіг.9 - виконання пристрою видалення вантаформи. жу у вигляді нескінченної стрічки; Додатковий технічний результат - позиціонуФіг.10 - показана фрикційна передача з роливання окремих транспортних модулів при переміком підпору. щенні їх по колу - досягається за допомогою спеПропоновані ваги-дозатор мають таку конструціального пристрою утримання, що пропонується у кцію. двох варіантах: у вигляді стяжних струн, один кіВаги-дозатор мають множину, у даному випанець яких закріплений з можливістю регулювання дку шість, окремих транспортних модулів секторнатягу на окремому транспортному модулі, а друної форми 1, розташованих з можливістю перемігий - на вільно підвішеному опорному кільці; і у щення навколо вертикальної осі 2, з наявністю вигляді сукупності пластинчатих ланок, що зав'яступеню свободи у вертикальному напрямку у зоні зують попарно суміжні платформи, і закріплених зважування (Фіг.1, 2). на них з можливістю вертикального зміщення плаОкремі транспортні модулі 1 споряджені притформ відносно осі кріплення. У останньому випастроями, що несуть вантаж, у вигляді сполучених дку жорсткість позиціонування збільшується у зв'яміж собою платформ 3, розміщених на рухомих зку з попарним зв’язком суміжних модулів. опорах 4, виконаних у вигляді колес або ковзунів, з Для усунення радіальних зусиль з боку внутможливістю переміщення по кільцевим напрямрішнього опорного ролика на окремий транспортним 5. ний модуль у зоні зважування внутрішня циліндриОкремі транспортні модулі 1 пов'язані з мехачна поверхня множини окремих транспортних нізмом диференційного переміщення їх по колу 6, модулів виконана з зазором холостого ходу внутякий містить в собі зовнішню силову передачу 7 у рішнього опорного ролика при переміщенні навевигляді фрикційної пари з приводним органом 8 і дених модулів крізь зону зважування. веденим елементом - циліндричним корпусом 9 Більш раціональним конструктивним виконанокремого транспортного модуля 1, сполученого ням є виконання зовнішньої силової передачі у зовнішньою циліндричною поверхнею з приводним вигляді фрикційної пари, веденим елементом якої органом 8 у зоні вивантаження. є циліндричний корпус окремого транспортного Окрім фрикційної пари (еквівалентом її можуть модуля. бути зубчаста, черв'якова передачі) механізм диференційного переміщення окремих транспортних 7 76037 8 модулів по колу 6 має в собі внутрішній опорний гами-дозаторами має широко відомі елементи: ролик 10, розміщений на вертикальній осі 2 всерепристрій, що задає масу; блок порівняння; частотдині множини наведених модулів і сполучений з ний перетворювач, від якого живиться електродвиодним з них по його внутрішній циліндричній повегун приводу (умовно не показані). рхні (Фіг.1, 3). Пропоновані ротаційні ваги-дозатор працюють Для усунення ймовірних радіальних зазорів та так. забезпечення необхідного зчеплення фрикційна Механізм диференційного переміщення окрепередача споряджена роликом підпору 11 приводмих транспортних модулів по колу 6 через зовнішного органу 8 до циліндричного корпусу 9 окремого ню силову передачу 7 (фрикційну пару) передає транспортного модуля 1. обертання від приводного органу 8 (напрям оберДля передачі руху окремим транспортним мотання показаний стрілкою на Фіг.2) до веденого дулям 1 по колу платформи 3 мають сполучення у елемента - циліндричного корпусу 9 окремого травигляді рухомого з'єднання 12 (Фіг.2, 4), виконанонспортного модуля 1, який знаходиться у зоні заго у вигляді виступів Г-образної форми, один з вантаження 25. Матеріал, наприклад вапняк, заваяких 13 розташований на нижній частині платфорнтажується через вікно завантаження 30 на ми 3, а другий 14 - на накладці 15, що прикріплюплатформи 3 під час проходження їх через зону ється до нижньої частини 16 наступної платформи завантаження 25. 3, що стикується з нею, і виступи 13, 14 сполучені Окремий транспортний модуль 1 з матеріалом з лінійним контактом у пазу на нижній частині плапереміщується на рухомих опорах 4 по кільцевим тформи 3. Кожна з платформ спирається на опорнапрямним 5. ну дільницю 17, виконану на накладці 15. Під час наїзду рухомих опор 4 окремих трансДля забезпечення позиціонування кожного портних модулів 1 на вагові вставки 32,33 у зоні окремого транспортного модуля 1 ваги-дозатор зважування 26 відбувається реєстрація маси ванспоряджені пристроєм утримання окремих транстажу у модулі. портних модулів при переміщенні їх по колу, викоПід час подальшого руху окремих транспортнаним у двох варіантах. них модулів у зону вивантаження 27 відбувається У першому варіанті пристрій являє собою видалення матеріалу через вікно вивантаження 36 множину стяжних струн 18 (Фіг.5), один кінець яких з платформи за допомогою скребачки 37 або не19 закріплений з можливістю регулювання натягу скінченної гнучкої стрічки 38. на окремому транспортному модулі 1, а другий 20 Внутрішній опорний ролик 10 і ролик підпору - на вільно підвішеному опорному кільці 21. Кожен 11 забезпечують у процесі приводу окремого траз окремих транспортних модулів й має одну чи нспортного модуля усунення ймовірних радіальних кілька стяжних струн, натяг яких регулюється гайзазорів у фрикційній передачі і необхідне підтискою 22. кання фрикційної пари. У другому варіанті з метою жорсткого позиціоМеханізм диференційного переміщення окренування пристрій утримання окремих транспортмих транспортних модулів 3 виконує функцію груних модулів при переміщенні їх по колу (Фіг.6) випового приводу всієї множини транспортних модуконаний у вигляді сукупності пластинчатих ланок лів, які безперервно переміщуються по колу. При 23 (Фіг.7), які пов'язують попарно дві суміжні плацьому окремий транспортний модуль 1, який заватформи 3, і закріплені на них з можливістю вертинтажується, проходить через зону завантаження, кального зміщення платформи відносно осі кріпштовхає через сполучення платформ у вигляді лення 24. рухомого з'єднання передній модуль, який знахоПропоновані ротаційні ваги-дозатор мають в диться у зоні зважування, і тягне за допомогою собі зони завантаження 25, зважування 26 і вивананалогічного з'єднання задній модуль, який знахотаження 27 (Фіг.2). диться у зоні вивантаження; розвантажений моВнутрішня циліндрична поверхня 28 множини дуль вступає у зону завантаження, де одержує окремих транспортних модулів 1 виконано з зазопримусове обертання від зовнішньої силової пером холостого ходу 29 внутрішнього опорного роредачі 7 механізму диференційного переміщення лика 10. окремих транспортних модулів і штовхає модуль, Для завантаження матеріалу є вікно завантащо рухається попереду, у зону зважування, і т.д. У ження 30, а також верхня тічка 31. зоні зважування модулі рухаються накатом, не Зона зважування 26 має інтегровану вимірюзамикаючи на себе силові ланцюги, які забезпечувальну секцію з ваговимірювальним датчиком ють переміщення модулів у зоні завантаження і (умовно не показаний), яка створюється ваговими вивантаження матеріалу. Таким чином механізм вставками 32, 33 (Фіг.2), розміщеними у концентдиференційного переміщення забезпечує безперичне розташованих зовнішній 34 і внутрішній 35 рервне переміщення по колу окремих транспортрейках кільцевих напрямних 5; зона вивантаження них модулів, і чинить примусове діяння тільки на 27 має вікно вивантаження 36 з пристроєм видаодин модуль, який знаходиться у зоні завантаженлення вантажу у вигляді скребачки 37, або у виня. гляді нескінченної стрічки 38 (Фіг.9), розташованої Позиціонування окремих транспортних модурадіальне у вікні вивантаження 36. Привід нескінлів при переміщенні по колу здійснюють стяжними ченної стрічки може бути сумісним з внутрішнім струнами 18 пристрою утримання, послаблюючи опорним роликом 10 зовнішньої силової переабо притискаючи їх натяг гайкою 22, або за доподачі 6. могою пластинчатих ланок 23, розташованих на Для регулювання продуктивності, а також веосях кріплення 24. личини доз, що зважуються, схема керування ва 9 76037 10 Для атестації вагів-дозатора пропускають чеговимірювальну секцію і, порівнюючи показання рез ваговимірювальну секцію цілу кількість разів сумарної маси модулів за один оберт до початку спочатку порожні окремі транспортні модулі, вироботи і під час діагностики, визначають погрішзначають середнє значення сумарної маси трансність ваг, одержану в наслідку експлуатації, а тапортних модулів за один оберт, потім на модулі кож характер несправності конструкції. установлюють еталонний вантаж і пропускають Пропонований винахід пройшов успішно достакож через вимірювальну секцію ціле число оберлідно-промислові випробування на одному з метатів, і визначають коефіцієнт масштабування ваг. лургійних заводів. У порівнянні з прототипом винаПри цьому механізм видалення вантажу (скребачхід дозволяє підвищити точність показань при ка) знімається. зважуванні та дозуванні; зменшити трудовитрати Під час діагностики стану ваг пропускають бана виготовлення конструкції; спростити налагогаторазово порожні транспортні модулі через вадження і експлуатацію ваг-дозатора. 11 Комп’ютерна верстка М. Клюкін 76037 Підписне 12 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюV.v. khosin rotary weigher proposed
Автори англійськоюKhosin Valerii Vasyliovych
Назва патенту російськоюРотационные весы, предложенные хозиным в.в.
Автори російськоюХозин Валерий Васильевич
МПК / Мітки
МПК: G01G 13/00, G01G 19/00, G01G 11/00
Мітки: ротаційні, в.в, ваги-дозатор, хозіна
Код посилання
<a href="https://ua.patents.su/6-76037-rotacijjni-vagi-dozator-khozina-vv.html" target="_blank" rel="follow" title="База патентів України">Ротаційні ваги-дозатор хозіна в.в.</a>
Ротаційні ваги хозіна в.в.
Номер патенту: 75952
Опубліковано: 15.06.2006
Автор: Хозін Валерій Васильович
МПК: G01G 13/00, G01G 11/00
Мітки: в.в, хозіна, ваги, ротаційні
Формула / Реферат:
1. Ротаційні ваги, що містять в собі вікна завантаження та вивантаження, привідний механізм, множину вантажоприймальних пристроїв, що установлені з можливістю переміщення навколо вертикальної осі та мають контакт з ваговимірювальним датчиком, які відрізняються тим, що вантажоприймальні пристрої виконані у вигляді окремих транспортних модулів, зв’язаних з повідцями привідного повідкового механізму з наявністю ступеня свободи у вертикальному...
Ваги
Номер патенту: 32706
Опубліковано: 15.02.2001
Автор: Галченко Семен Микитович
МПК: G01G 1/00
Мітки: ваги
Формула / Реферат:
Ваги, що містять корпус та вантажну і гирьову платформи, які відрізняються тим, що кінематичний ваговий зв'язок між платформами здійснюється за допомогою циліндричного валу, прикріпленого нерухомо до гирьової платформи, а до корпуса вагів і до вантажної платформи за допомогою тонких, гнучких стрічок, які забезпечують рухомість платформи, а гирьова платформа має 10 поперечних пазів, які знаходяться один від одного на відстані рівній діаметру...
Низькопрофільні ваги для зважування залізничного транспорту
Номер патенту: 63031
Опубліковано: 15.01.2004
Автори: Нікітінський Михайло Павлович, Докаленко Сергій Анатолійович, Капітельман Леонід Вільямович
МПК: G01G 19/00, B60S 5/00
Мітки: транспорту, низькопрофільні, зважування, ваги, залізничного
Формула / Реферат:
1. Низькопрофільні ваги для зважування залізничного транспорту, які містять вантажоприймальну платформу, пристрій силовведення, встановлені на фундаменті силовимірювальні модулі з тензодатчиками, які відрізняються тим, що силовимірювальні модулі з тензодатчиками розташовані перед стиками рейок під'їзного шляху з рейками вантажоприймальної платформи та вписані по висоті у кінцеві опорні частини подовжніх балок вантажоприймальної платформи,...
Ваги для зважування транспортних засобів
Номер патенту: 37468
Опубліковано: 15.05.2001
Автори: Браз Давид Леонідович, Альтман Ілля Аронович, Фурер Олександр Мойсейович
МПК: B60S 5/00, G01G 19/00
Мітки: транспортних, зважування, засобів, ваги
Формула / Реферат:
1. Ваги для зважування транспортних засобів, що містять установлену на нерухомій опорі опорну раму вантажоприймальну платформу, датчики для вимірювання сили, що розташовані між опорною рамою і вантажоприймальною платформою, струнки, апаратуру індикації та реєстрації, які відрізняються тим, що опорна рама виконана у вигляді пов'язаних перемичкою блоків коробчастої форми, нижні горизонтальні плити яких обладнані вертикально розташованими...
Ваги платформні
Номер патенту: 67819
Опубліковано: 15.07.2004
Автори: Нестеренко Василь Іванович, Вільяверде Кано Відаль, Артюшенко Анатолій Дмитрович
МПК: G01G 19/02
Мітки: платформні, ваги
Формула / Реферат:
1. Ваги платформні, що містять вантажоприймальну платформу, силовимірювальні датчики по її кутах, які з'єднані анкерними болтами з основою та вимірювальною апаратурою, вузли поперечної і повздовжньої стабілізації, які відрізняються тим, що повздовжні балки вантажоприймальної платформи розташовані попарно з урахуванням даних статистики про колію, наприклад, автомобілів, а по осях платформи розташовані чотири вузли із ковзними парами, що її...
Попередній патент: Спосіб діагностики асиметрії легеневої вентиляції
Наступний патент: Виконавчий орган гірничої машини
Випадковий патент: Бойова машина