Пристрій для контролю положення гірничої машини
Номер патенту: 7630
Опубліковано: 26.12.1995
Автори: Злодєєв Олександр Васильович, Войтюк Клим Кирилович, Сіненко Віктор Васильович, Прудніков Олександр Васильович, Некрасов Сергій Вікторович, Рябчиков Анатолій Єгорович
Формула / Реферат
Устройство для контроля положения горной машины, содержащее лазер и задатчик опорной плоскости, установленные в выработке, а также блок индикации и подключенные к нему фотоприемные линейки, отличающееся тем, что с целью повышения его дальности действия и надежности, оно дополнительно снабжено светоиндикаторными линейками, соединенными с выходами фотоприемных линеек, а задатчик опорной плоскости выполнен из набора инфракрасных излучателей, блока развертки и щелевой диафрагмы, расположенных на общей оптической оси в одной плоскости.
Текст
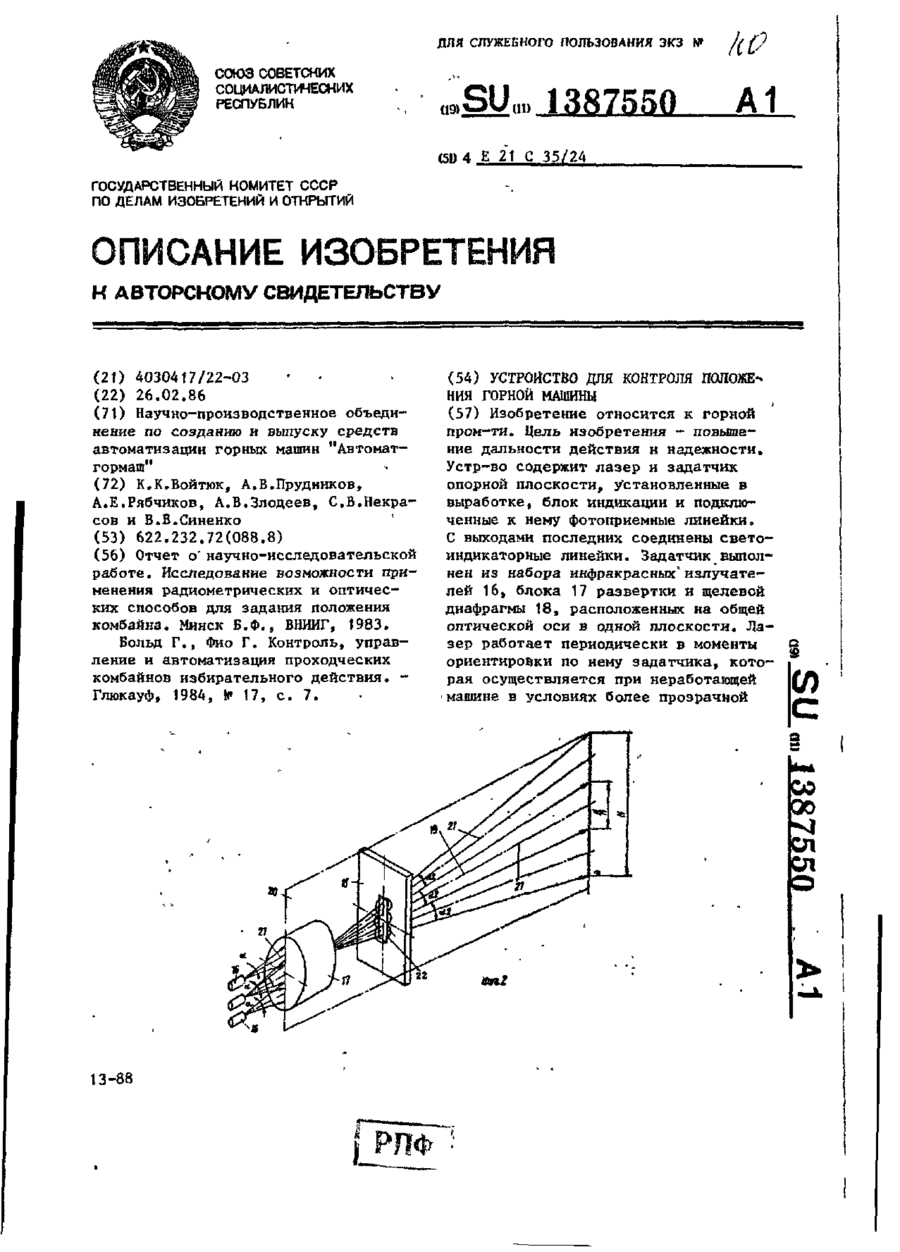
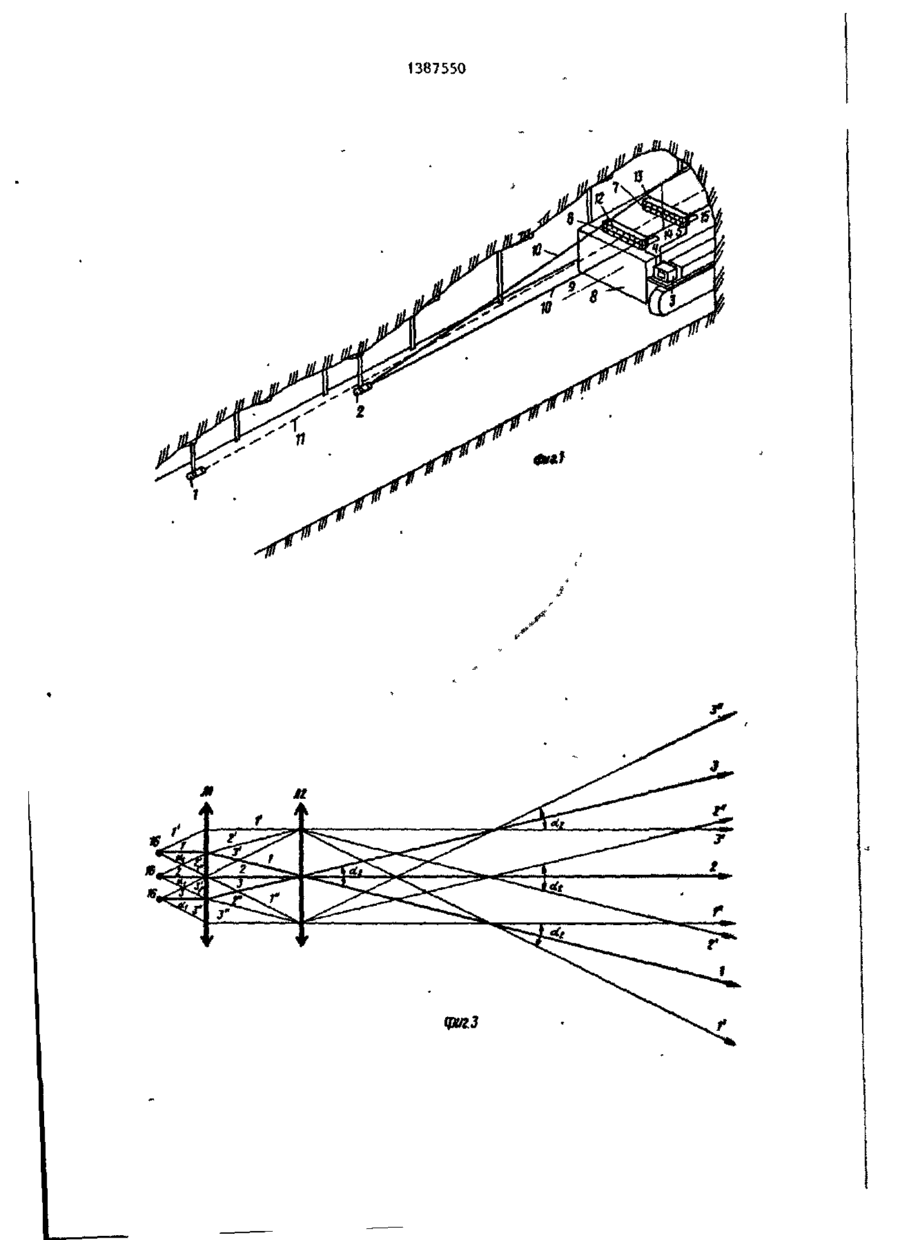
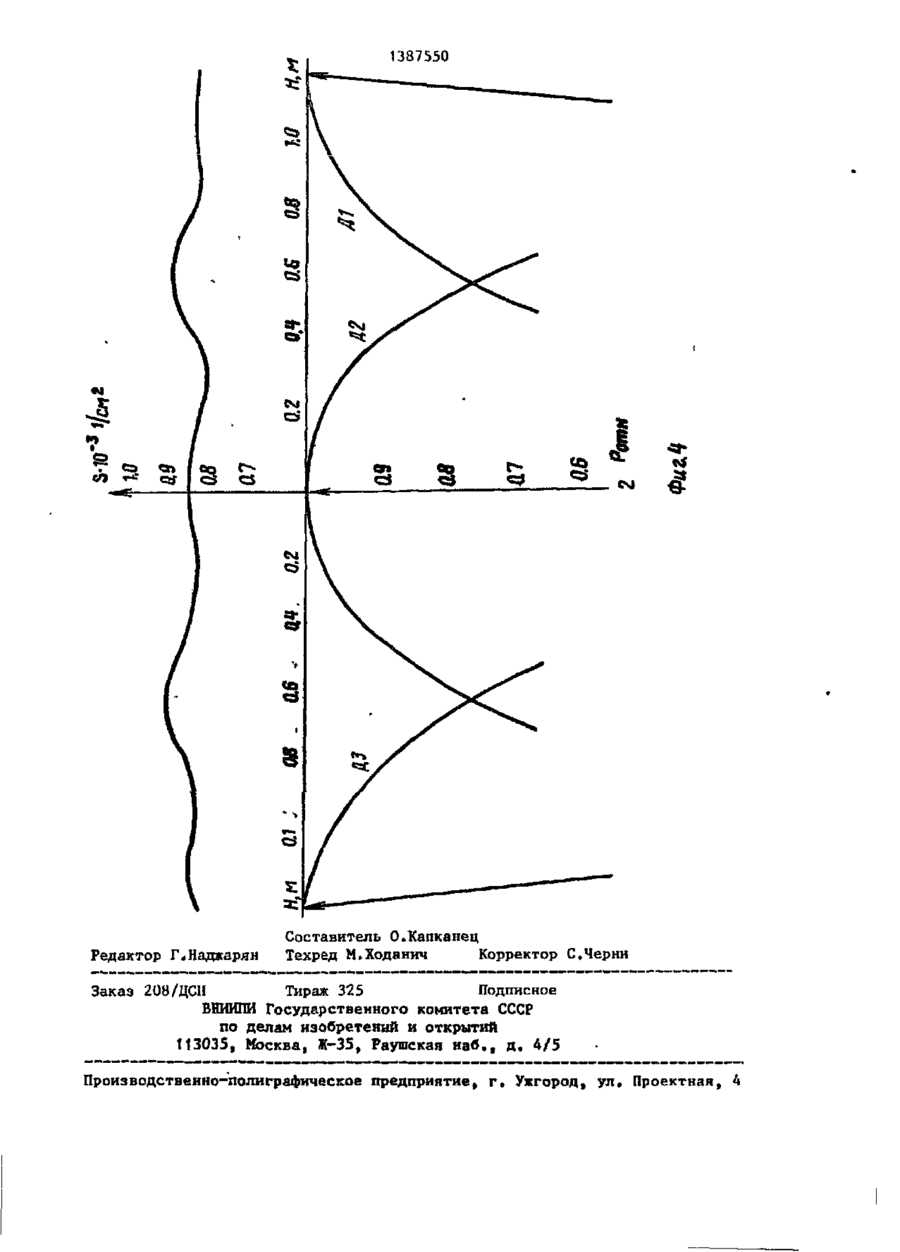
ДЛЯ СЛУЖЕБНОГО ПОЛЬЗОВАНИЯ СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК ЭКЗ № ///, А1 (50 4 Е 21 С 35/24 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (21) 4030417/22-03 (22) 26.02.86 (71) Научно-производственное объединение по созданию и выпуску средств автоматизации горных машин "Автоматгормаш" (72) К.К.Войтюк, А.В.Прудников, А.Е.Рябчиков, А.В.Злодеев, С,В.Некрасов и В.В.Синенко (53) 622.232.72(088.8) (56) Отчет о' научно-исследовательской работе. Исследование возможности применения радиометрических и оптических способов для задания положения комбайна, Минск Б.Ф., ВНИИГ, 1983. Больд Г., Фио Г. Контроль, управление и автоматизация проходческих комбайнов избирательного действия. Глюкауф» 1984, № 17, с. 7. (54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ІЇОЛОЖЕ-* НИЯ ГОРНОЙ МАШИНЫ (57) Изобретение относится к горной пром-ти. Цель изобретения - повышение дальности действия и надежности, Устр-во содержит лазер и задатчнк опорной плоскости, установленные в выработке, блок индикации и подключенные к нему фотоприемные линейки. С выходами последних соединены светоиндикаторные линейки. Задатчик выполнен из набора инфракрасных1 излучателей 16, блока 17 развертки и щелевой диафрагмы 18, расположенных на общей оптической оси в одной плоскости. Лазер работает периодически в моменты с ориентировки по нему задатчика, которая осуществляется при неработающей • машине в условиях более прозрачной (Л со 00 ел СЛ О 13-88 1387550 ния в любом поперечном сечении плосатмосферы. Набор излучателей 16, блок кости. Это обуславливает равенства 17 и диафрагма 18 обеспечивают ориуглов расходимости их излучения на ентацию опорной плоскости относительвыходе задатчика и равномерность их но общей оптической оси и равноудаперекрытия в пространстве. 4 ил. ленность максимумов диаграмм излуче Изобретение относится к горной промышленности и предназначено для контроля отклонения и угла поворота горной машины, например проходческого 5 комбайна, относительно заданного направления. Целью изобретения является увеличение оперативной дальности действия и повышение надежности устройства. W На фиг. 1 приведена функциональная схема устройства для контроля положения горной машины; на фиг. 2 - функциональная схема задатчика опорной плоскости; на фиг. 3 - оптическая схе-15 ма блока развертки; на фиг, 4 - диаграммы направленности и плотности излучения задатчика опорной плоскости. Инфракрасные излучатели 16 расположены перед конденсатором на расстоянии, равном 0,5F, На оптической схеме показан в сечении ход центральных 1 (1,2,3) и боковых О ' , 1 * , 2', 2 ', З'; я 3 ) лучей излучателей 16 через блок развертки,. Возможность формирования опорной плоскости с любыми требуемыми геометрическими параметрами обеспечивается способом расположения элементов блока развертки. Изменяя, например, расположение и количество ИК-излучателей относительно линзы конденсора и форму щелевой диафрагмы 18 можно получить опорную плоскость любой конфигурации (круг, крест, квадрат), что практически невозможно делать Устройство содержит лазер 1 и аа- 20 в случае применения единичного лазера с видимым излучением или отдельдатчик 2 опорной плоскости, установного ИК-излучателя, ленные в выработке, блок 3 индикации и подключенные к нему перемычками 4, Устройство работает следующим об5 фотоприемные линейки 6,7, установразом. 25 ленные яа машине 8 друг за другом, Направление движения горной машиперпендикулярно ее продольной оси 9 ны, например проходческого комбайна, таким образом, что опорная вертии проходимой им выработки задается кальная плоскость 10 пересекает их на большой отрезок пути лучом лазепараллельно лучу 11 лазера, светоинра 1, Направление движения машины на дикаторные линейки 12,13, соединен30 короткие интервалы ее работы, наприные перемычками 14, 15 с фотоприеммер на несколько смен, задается задатными линейками 6,7. Задатчик 2 опорчиком 2 опорной плоскости. ной плоскости выполнен с повышенной Инфракрасное излучение излучатемощностью излучения и содержит набор лей -16 (фиг. 3 ) , набор которых может инфракрасных излучателей 16, блок 17 35 состоять из любого требуемого колиразвертки и щелевую диафрагму 18, чества, направляется на конденсорную расположенные на общей оптической линзу J 1 таким образом, чтобы обеспеI оси 19, в одной плоскости 20 с коточивался наиболее полный его прием. рой проходят через блок 17 развертЛинзой Л1 все излучение собирается ки и щелевую диафрагму 18 оси 21 из- 40 и концентрируется в одной плоскости лучения инфракрасных излучателей. На (в плоскости линзы Л 2 ) . Линзой 12 щелевой диафрагме 18 проектируются попадаемое на нее излучение развертыконтуры 22 излучения излучателей 16, вается в опорную плоскость, представБлок 17 развертки состоит из конденляющую в вертикальном сечении сочетасорной линзы 11 и линзы объектива Л2,д5 ние расположенных друг под другом Линзы сферические (двояковыпуклые) сечений телесных углов. Сформированс одинаковым фокусным расстоянием F. н о е в опорную плоскость 10 излучение 1387550 после блока 17 развертки проходит через щелевую диафрагму 18, которая окончательно формирует контуры поперечного сечения плоскости путем теневого обрезания нечетных контуров 22 излучения. Сформированная таким образом вертикальная опорная плоскость 10 параллельна лучу лазера 1 и в исходном состоянии пересекает центральные ^Q чувствительные элементы фотоприемных линеек 6 и 7. При отклонении или разворотах горной машины 8 в горизонтальной плоскости опорная плоскость смещается с центральных на другие у$ 'чувствительные элементы фотоприемных линеек 6 и 7, которые преобразуют энергию попадающего на элементы инфракрасного излучения в электрические сигналы. По этим сигналам, в соот20 ветствии с позиционными номерами чувствительных элементов блок 3 индикации определяет середины засвеченных интервалов и индицирует машинисту параметры отклонения комбайна от за- 25 данного направления, по которым он управляет ее положением в пространстве выработки. Одновременно выходные сигналы фотопрнемников 6 и 7 поступают по перемычкам Ї4 и 15 соответственно на входы своих светоинди- 30 каторных линеек 12 и 13, на которых засвечиваются те световые индикаторы, которые расположены на одних осях с одноименными, засвеченными инфракрасным излучением, чувствительными эле- 35 ментами фотоприемных линеек 6 и 7. Этим осуществляется постоянный контроль положения опорной плоскости и работоспособности задатчика опорной плоскости и фотоприемных линеек 6,7. 40 Кроме того, при необходимости машинист может использовать эти данные для определения отклонения ими угла поворота машины, что дублирует элемен ты системы и повышает ее надежность. 45 Задатчик 2 опорной плоскости работает практически в течение всего времени работы и движения машины, ікогда условия прохождения видимого лазерного излучения ухудшаются из-за снижения прозрачности атмосферы в выработке. Применение в задатчике опорной плоскости более мощного и менее чувствительного к запыленной атмосфере инфракрасного излучения обеспечивает увеличение дальности устройства с одной установки задатчика 2 опорной плоскости и повышает надежность контроля положения машины. Применение инфракрасного задатчика опорной плоскости с повышенной мощностью излучения позволяет снизить требование к чувствительности фотоприемных линеек 6, 7, что повышает надежность устройства за счет упрощения приемноусилительных устройств. Сущность способа формирования опорной плоскости из набора инфракрасных излучателей 16, обеспечивающего более равномерную пространственную плотность излучений в любом ее сечении заключается в следующем. Набор инфракрасных излучателей 16, блок 17 развертки и щелевая диафрагма 18 расположены на общей оптической оси 19, в одной плоскости с которой проходят через блок 17 развертки и щелевую диафрагму 18 равноудаленно друг от друга оси излучений инфракрасных излучателей 16. Этими условиями обеспечивается ориентация опорной плоскости относительно общей оптической оси и равноудаленность максимумов диаграмм излучения в любом поперечном сечении плоскости, что обуславливает равенство углов расходимости из излучения на выходе задатчика и равномерность их перекрытия в пространстве. Благодаря этому в сочетании со вторым условием, в соответствии с Лазер 1 в устройстве работает пекоторым мощности излучения инфракрасриодически в моменты ориентировки ных излучателей 16 равны, обеспечивапо нему задатчика опорной плоскости, 50 ется более равномерная плотность изкоторая осуществляется, как правило, лучения в любом сечении плоскостии, при неработающей машине в условиях так как изменяя угол расходимости < . *, более прозрачной атмосферы. можно добиться такого перекрытия изЭто повышает общую дальность дейлучения, что его плотность на участствия устройства для одной переноски ках между осями излучения будет прилазера 1,, повышает его надежность за 55 мерно равна плотности по осям излусчет увеличения срока службы лазера Ї, чения. А это не только повышает обусловленную менее интенсивным режидальность действия устройства и его мом его работы. надежность в условиях пониженной 1387550 прозрачности атмосферы, но и повышает точность контроля благодаря исключению ложных срабатываний фотоприемников, обусловленных провалами по _ чувствительности в поперечном сечении опорной плоскости. Возможное в процессе работы в шахтной атмосфере размывание контуров поперечного сечения опорной плоскостию не влияет существенно на точность контроля системы, так как координаты отклонения определяются по центру засвеченных участков фотоприемных линеек. J5 Сущность способа обеспечения близкой к равномерной пространственной плотности излучения в зависимости от основных параметров задатчика 2 опорной плоскости выражается математичес- 20 кой зависимостью, полученной следующим образом (фиг. 2 ) . Пусть L-заданная (например, по условиям чувствительности фотоприемников) максимальная дальность действия 25 задатчика 2 опорной плоскости; Н заданная высота поперечного сечения опорной плоскости на максимальной дальности; еб2 - угол излучения единичных инфракрасных излучателей 16 зо на выходе блока развертки, при котором обеспечивается близкое к равномерному перекрытие диаграмм их излучения . Определим количество излучателей п, при котором обеспечивается близкая к равномерной плоскость излучения на участке поперечного сечения опорной плоскости каждого излучателя, Н Для обеспечения перекрытия излучения излучателей угол должен выбираться меньше величины полного угла излучения (фиг. 4 - диаграммы направленности) единичного излучателя, т.е. et,=k,ot, • (4) где к, - коэффициент перекрытия диаграмм излучения. Для большинства инфракрасных излучателей (инфракрасных диодов, лазеров) полный угол излучения равен в среднем 60°. В зависимости от типа излучателя угол oL, рекомендуется принимать в диапазоне 10...30 градусов, что соответствует среднему значению коэффициента к =0,15...0,5. С учетом Н 2гіГ Є 5к,оі. (5) Согласно (5) количество инфракрасных излучателей Н (6) n где k=0,5k, - коэффициент перекрытия диаграмм излучения единичных излучателей, значение которого рекомендуется выбирать в диапазоне 0,075... 0,25. Данная структура задатчика опорной плоскости и способ формирования с ее помощью более равномерной пространственной плотности излучения позволяют создавать безопасные по фактору излучаемой и потребляемой мощности устройства. Ф о р м у л а и з о б р е т е н и я равном -. , 40 Устройство для контроля положения горной машины, содержащее лазер и заПо фиг. 2 для осевого (центрально го) излучателя датчик опорной плоскости, установленные в выработке, а также блок инди0,5*,. (1) 5 S r t g 45 кации и подключенные к нему фотоприКоэффициент углового увеличения блоемные линейки, о т л и ч а ю щ е е ка развертки с я тем, что, с целью повышения его дальности действия и надежности, оно tg 0,5*. дополнительно снабжено светоиндика(2) торными линейками, соединенными с В соответствии с ( 50 выходами фотоприемных линеек, а заtg 0,5
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of position of mining machine
Автори англійськоюVoitiuk Klym Kyrylovych, Prudnikov Oleksandr Vasyliovych, Riabchikov anatolii Yegorovych, Zlodeiev Oleksandr Vasyliovych, Sinenko Viktor Vasyliovych
Назва патенту російськоюУстройство для контроля положения горной машины
Автори російськоюВойтюк Клим Кириллович, Прудников Александр Васильевич, Рябчиков Анатолий Егорович, Злодеев Александр Васильевич, Синенко Виктор Васильевич
МПК / Мітки
МПК: E21C 35/24
Мітки: положення, машини, контролю, пристрій, гірничої
Код посилання
<a href="https://ua.patents.su/6-7630-pristrijj-dlya-kontrolyu-polozhennya-girnicho-mashini.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю положення гірничої машини</a>
Фотоприйомний пристрій для контролю положення гірничої машини

Номер патенту: 7627
Опубліковано: 26.12.1995
Автори: Прудніков Олександр Васильович, Огійчук Юрій Іванович, Войтюк Клим Кирилович, Рябчиков Анатолій Єгорович, Злодєєв Олександр Васильович
МПК: E21C 35/24
Мітки: гірничої, положення, фотоприйомний, пристрій, машини, контролю
Формула / Реферат:
фотоприемное устройство для контроля положения горной машины, содержащее фотоприемную линейку с расположенными на ней в один ряд информационными фотоэлементами, фотоусилитель, коммутатор, генератор, три элемента И и дешифратор, отличающееся тем, что, с целью повышения функциональной надежности и уменьшения погрешности, оно снабжено ключами по количеству информационных фотоэлементов, двумя компенсирующими фотоэлементами, расположенными у...
Тірісторний пристрій для управління та захисту електромагнітної муфти привода гірничої машини
Номер патенту: 7611
Опубліковано: 29.09.1995
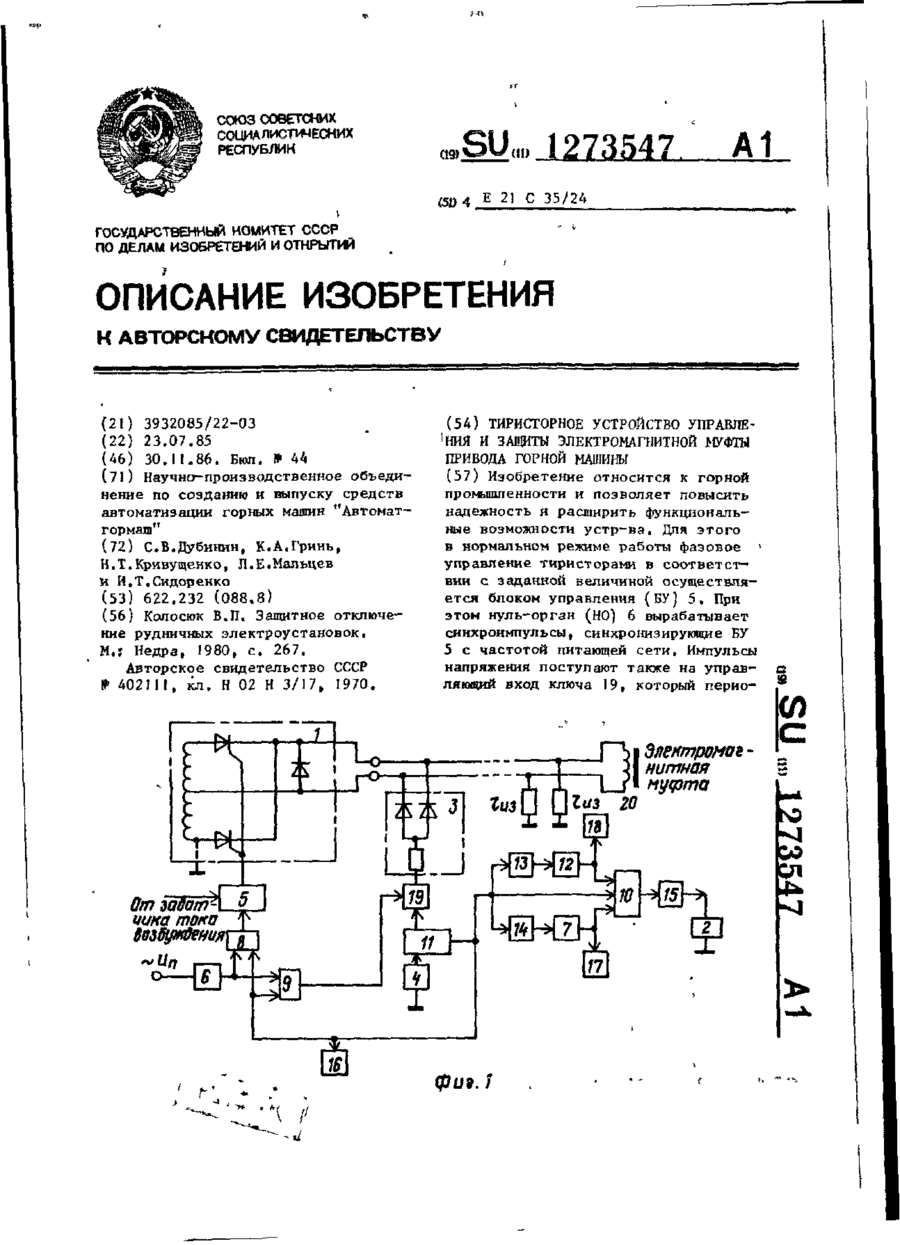
Автори: Гринь Костянтин Афанасійович, Сидоренко Іван Тимофійович, Кривущенко Микола Тимофійович, Мальцев Леонід Єгорович, Дубінін Сергій Васильович
МПК: E21C 35/24
Мітки: муфти, захисту, машини, пристрій, тиристорний, привода, гірничої, управління, електромагнітної
Формула / Реферат:
Тиристорнеє устройство управлений и защиты электромагнитной муфты привода горной машины, содержащее источник переменного напряжения, источник постоянного напряжения, первый фильтр, электромагнитное реле, блок управления тиристорами, выход которого связан с управляющим входом тиристорного выпрямителя, выходные клеммы которого подключены к нагрузке, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей...
Пристрій для управління швидкістю електромагнітної муфти сковзання приводу гірничої машини
Номер патенту: 7613
Опубліковано: 29.09.1995
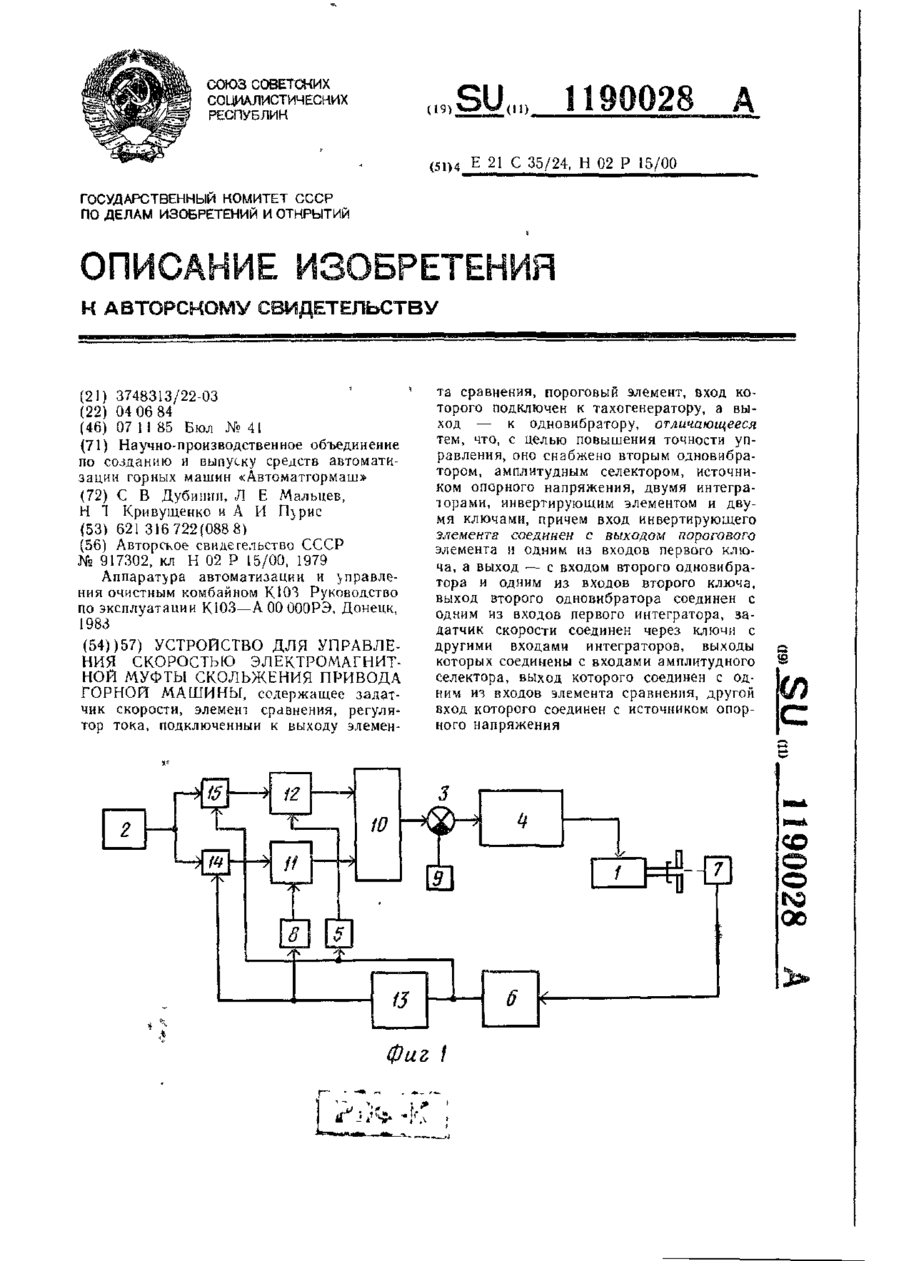
Автори: Пуріс Олександр Іванович, Дубінін Сергій Васильович, Мальцев Леонід Єгорович, Кривущенко Микола Тимофійович
МПК: E21C 35/24, H02P 15/00
Мітки: управління, швидкістю, муфти, машини, пристрій, гірничої, приводу, електромагнітної, сковзання
Формула / Реферат:
Устройство для управлення скоростью электромагнитной муфты скольжения привода горной машины, содержащее задатчик скорости, элемент сравнения, регулятор тока, подключенный к выходу элемента сравнения, пороговый элемент, вход которого подключен к тахогенератору, а выход - к одновибратору, отличающееся тем, что, с целью повышения точности управлення, оно снабжено вторым одновибратором, амплитудным селектором, источником опорного напряжения,...
Пристрій для контролю перевищення швидкості шахтної підйомної машини
Номер патенту: 4955
Опубліковано: 28.12.1994
Автори: Прохоренко Вадим Олександрович, Матвієнко Микола Павлович
МПК: B66B 5/04
Мітки: швидкості, машини, пристрій, шахтної, контролю, підйомної, перевищення
Формула / Реферат:
1. Устройство для контроля превышения скорости шахтной подъемной машины, содержащее первый генератор тактовых импульсов, выход которого подключен к первому входу первого элемента И, второй вход которого соединен с первым входом второго элемента И, второй вход которого подключен к выходу первого датчика пути и к входу первого дифференцирующего элемента, отличающееся тем, что, с целью повышения надежности, оно снабжено вторым датчиком и...
Пристрій для контролю виткових замикань в обмотці ротора електричної машини
Номер патенту: 5510
Опубліковано: 28.12.1994
Автори: Шофул Анатолій Кирилович, Конарєв Олексій Павлович, Кузьмін Віктор Володимирович, Ліцов Володимир Іванович
МПК: H02K 11/00, H02H 7/08
Мітки: машини, замикань, контролю, ротора, обмотці, виткових, пристрій, електричної
Формула / Реферат:
Устройство контроля витковых замыканий в обмотке ротора электрической машины, содержащее установленный в воздушном зазоре датчик электромагнитной индукции, блок индикации, блок аналоговых ключей и последовательно соединенные блок пиковых детекторов, блок сумматоров, дифференциальный усилитель и компаратор, отличающееся тем, что в него дополнительно введены блок восстановления низкочастотной составляющей сигнала, полосовой фильтр с...
Попередній патент: Пристрій для приймання сигналів
Наступний патент: Пристрій для біологічної оцінки токсичності води
Випадковий патент: Склад пресованого порошкового дроту для зварювання міді