Синусоїдальна планетарна передача
Формула / Реферат
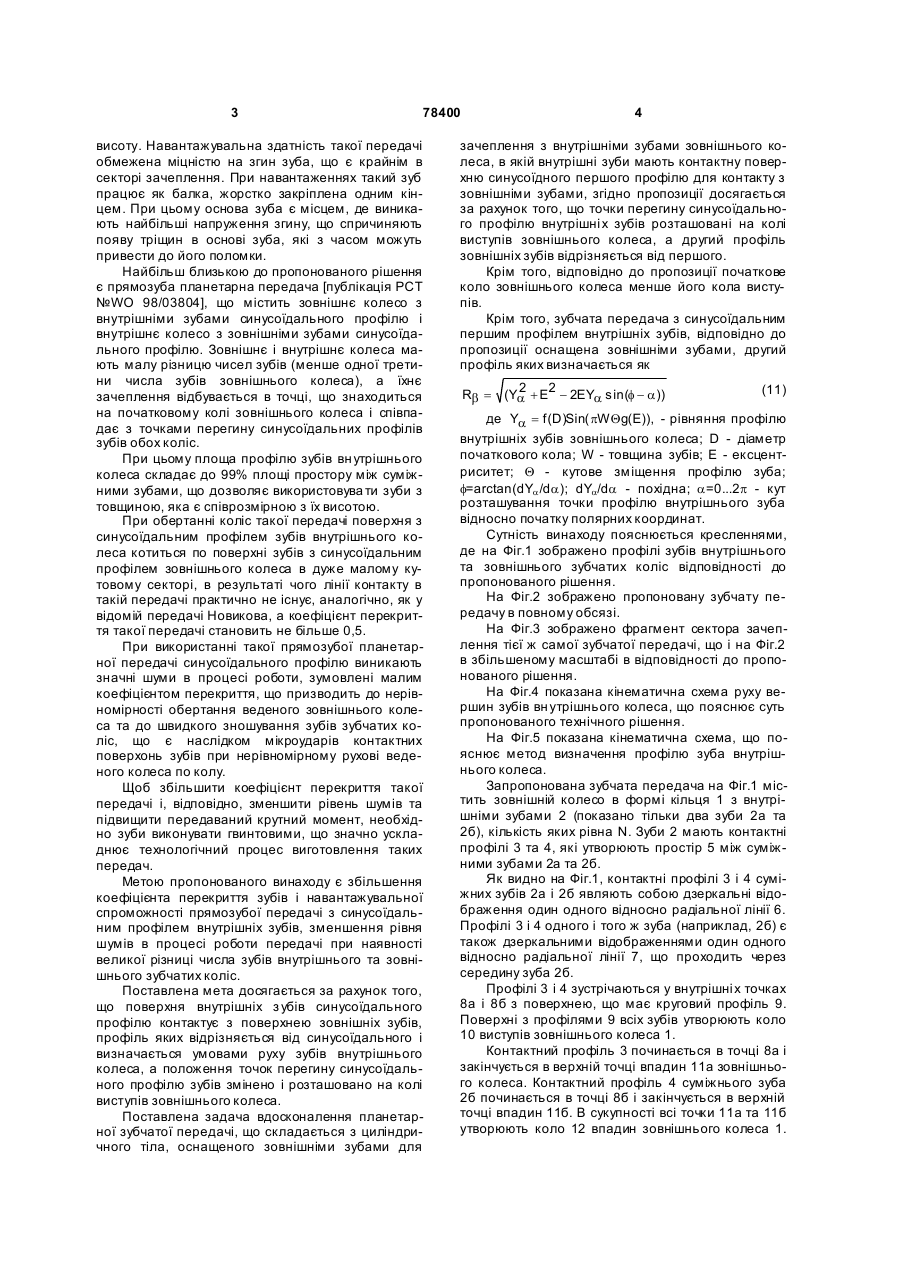
1. Синусоїдальна планетарна передача, що складається з циліндричного тіла (16), оснащеного зовнішніми зубами (17) для зачеплення з внутрішніми зубами (2) зовнішнього колеса (1), в якій внутрішні зуби (2) мають контактну поверхню першого синусоїдального профілю (3,4) для контакту з зовнішніми зубами (17), яка відрізняється тим, що точки перегину (8) синусоїдального профілю (3,4) внутрішніх зубів (2) розташовані на колі виступів (10) зовнішнього колеса (1), а другий профіль (18,19) зовнішніх зубів (17) відрізняється від першого.
2. Планетарна передача за п.1. яка відрізняється тим, що діаметр початкового кола (28) зовнішнього колеса (1) менший його діаметра (10) кола виступів.
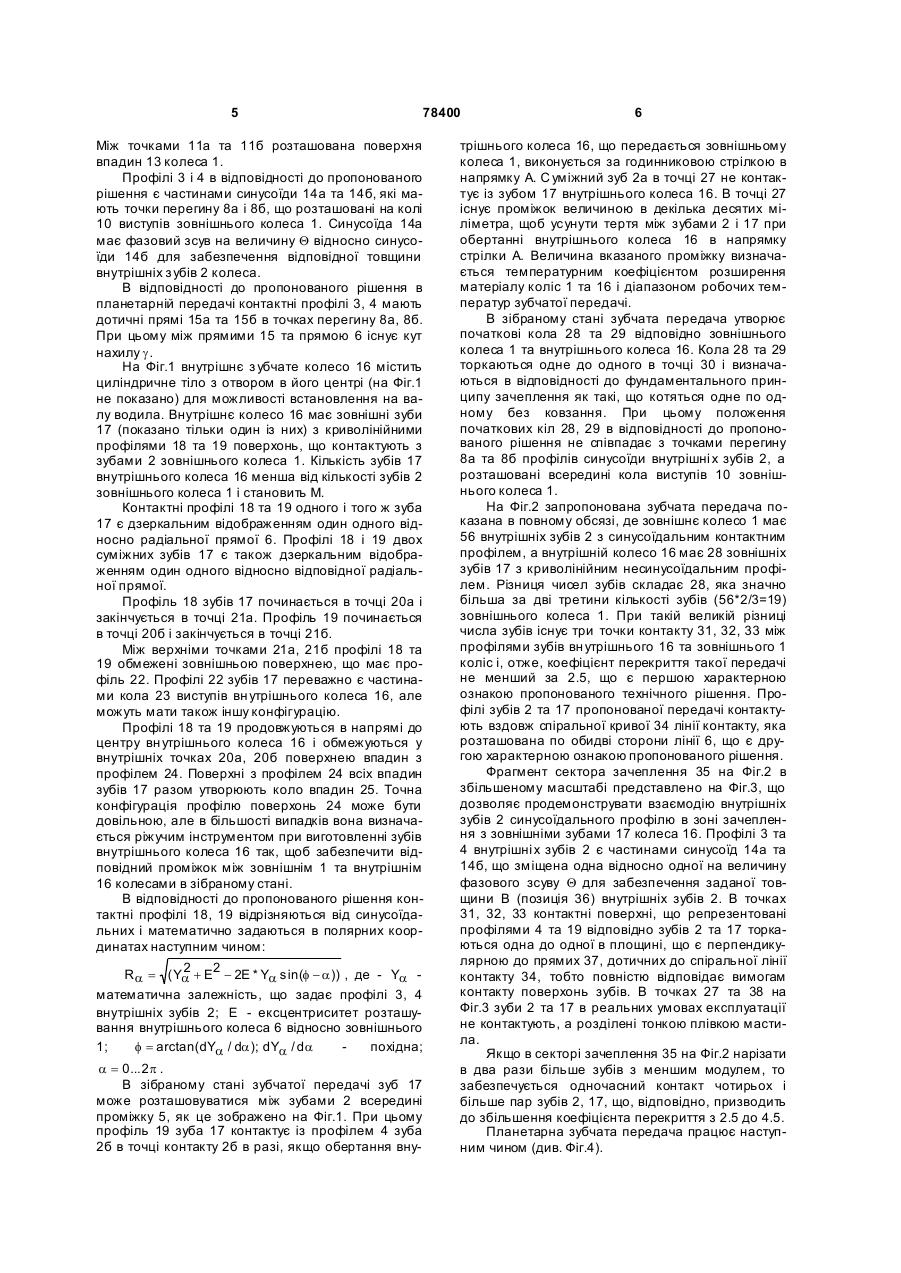
3. Планетарна передача за п.1. яка відрізняється тим, що циліндричне тіло (16) оснащено зовнішніми зубами (17), другий профіль (18,19) яких визначається в полярних координатах як
![]()
де ![]() - рівняння профілю внутрішніх зубів зовнішнього колеса; D - діаметр початкового кола; W - товщина зубів; Е - ексцентриситет;
- рівняння профілю внутрішніх зубів зовнішнього колеса; D - діаметр початкового кола; W - товщина зубів; Е - ексцентриситет; ![]() - кутове зміщення профілю зуба;
- кутове зміщення профілю зуба; ![]()
![]() - похідна в полярних координатах,
- похідна в полярних координатах, ![]() - кут розташування точки профілю внутрішнього зуба відносно початку координат.
- кут розташування точки профілю внутрішнього зуба відносно початку координат.
Текст
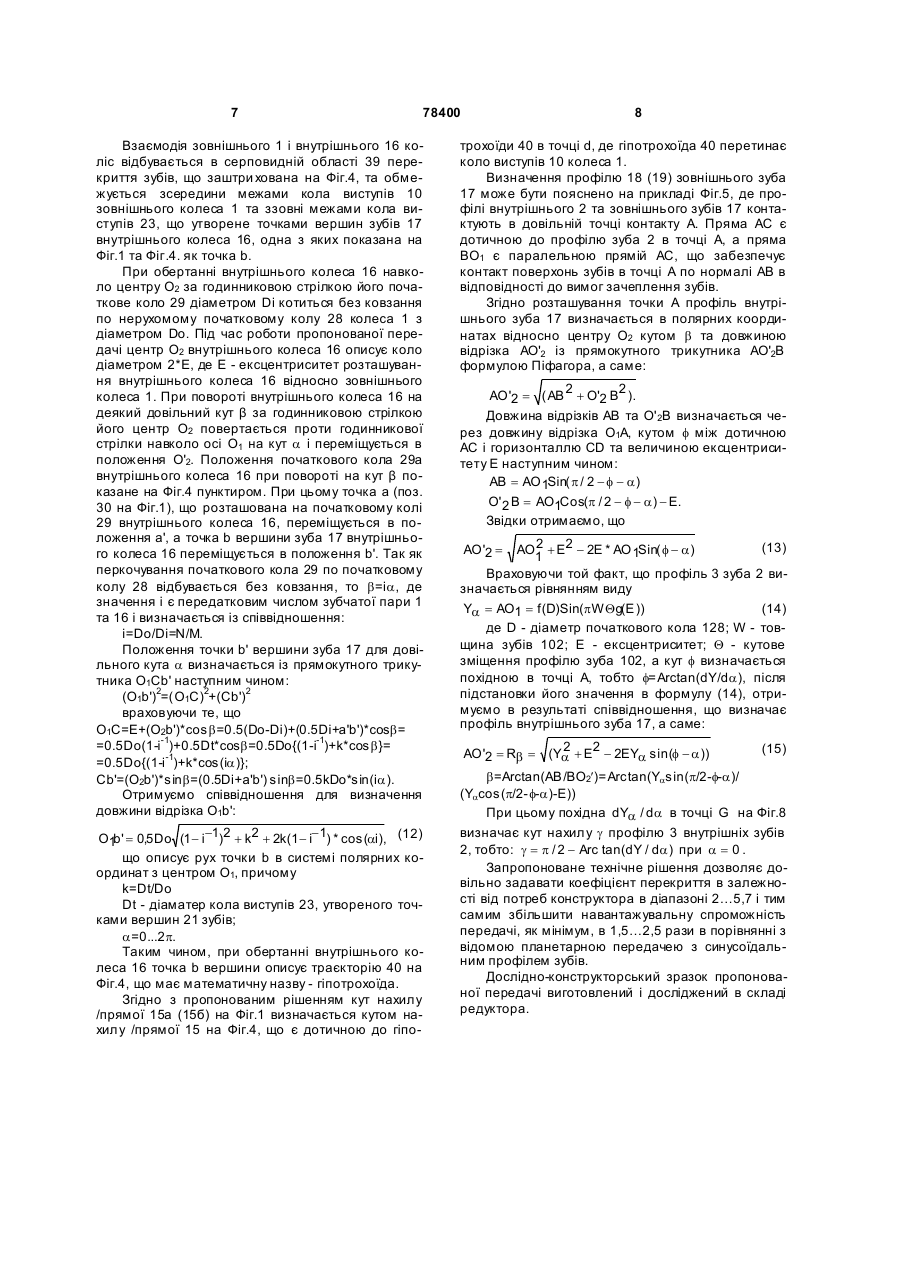
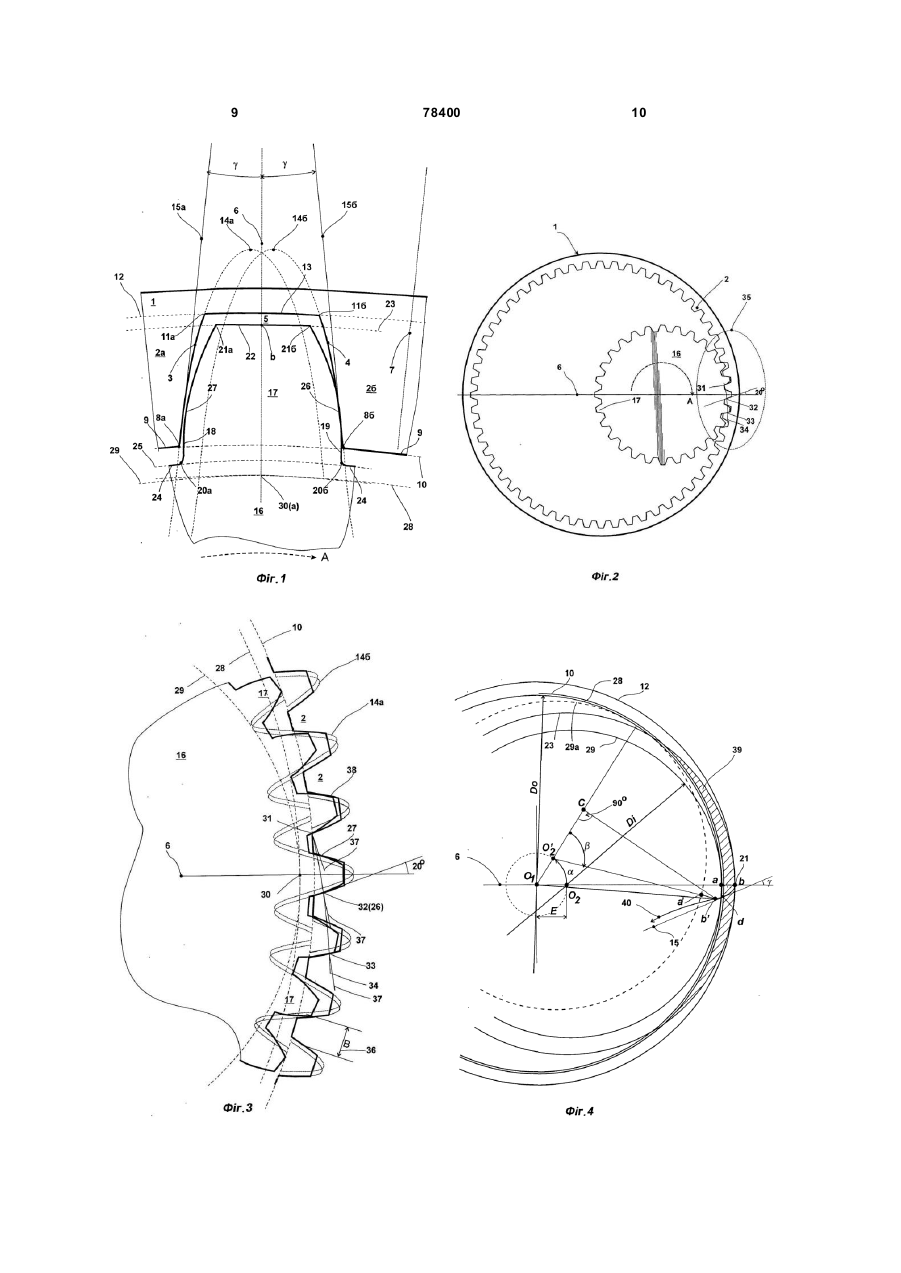
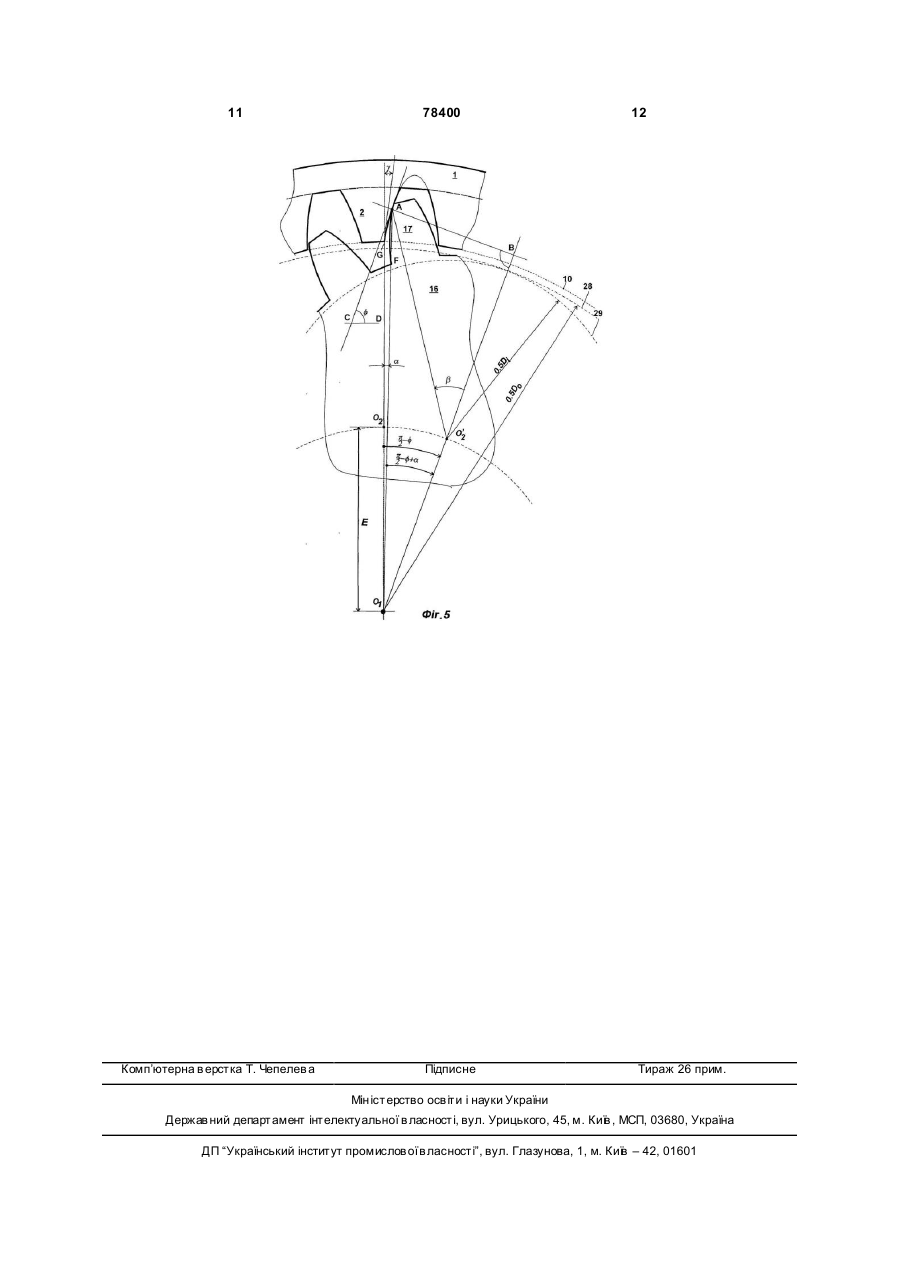
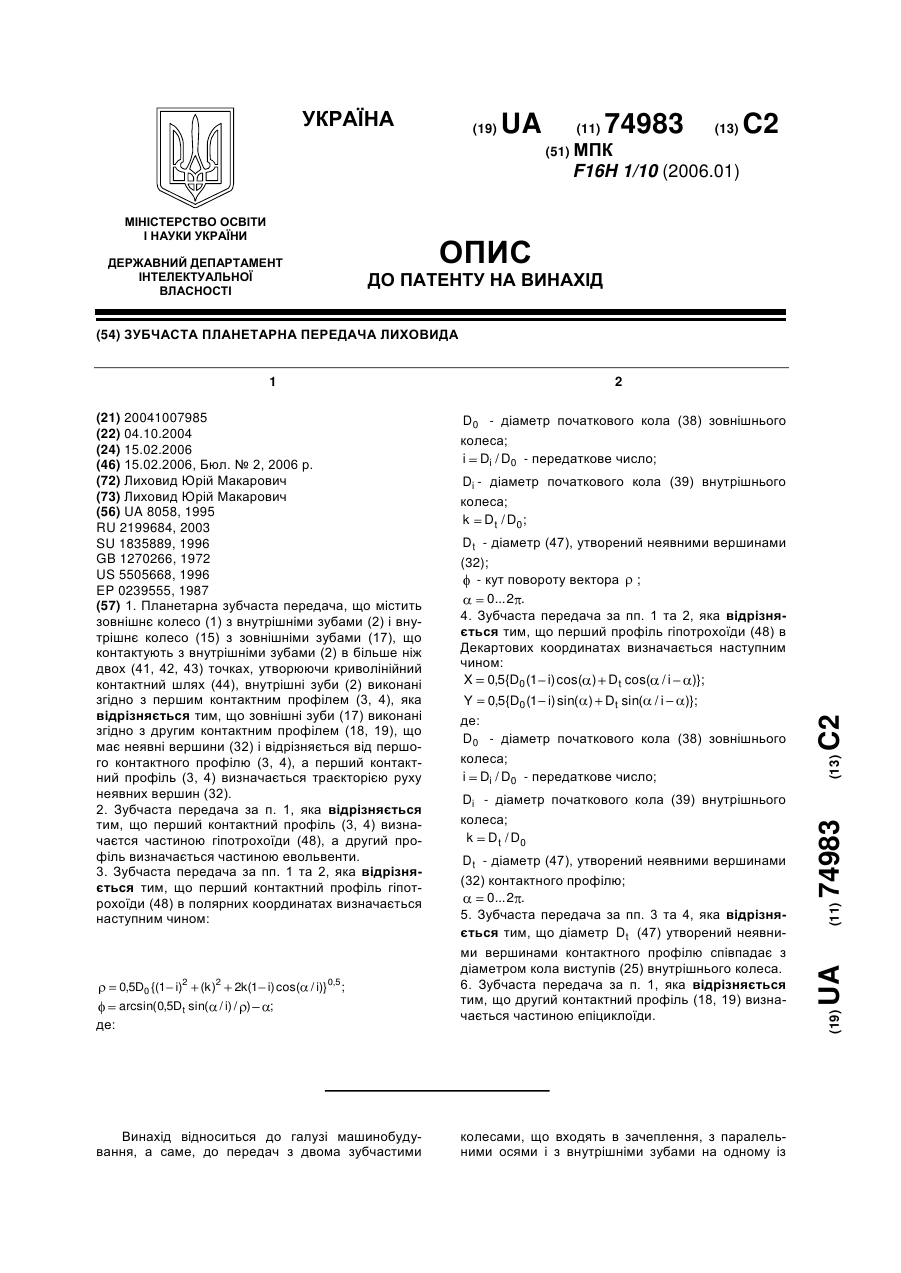
1. Синусоїдальна планетарна передача, що складається з циліндричного тіла (16), оснащеного зовнішніми зубами (17) для зачеплення з внутрішніми зубами (2) зовнішнього колеса (1), в якій внутрішні зуби (2) мають контактну поверхню першого синусоїдального профілю (3,4) для контакту з зовнішніми зубами (17), яка відрізняється тим, що точки перегину (8) синусоїдального профілю (3,4) внутрішніх зубів (2) розташовані на колі виступів (10) зовнішнього колеса (1), а другий про філь (18,19) зовнішніх зубів (17) відрізняється від першого. 2. Планетарна передача за п.1. яка відрізняється тим, що діаметр початкового кола (28) зовнішнього колеса (1) менший його діаметра (10) кола виступів. 3. Планетарна передача за п.1. яка відрізняється тим, що циліндричне тіло (16) оснащено зовнішніми зубами (17), другий профіль (18,19) яких визначається в полярних координатах як Винахід відноситься до галузі машинобудування, а саме - до планетарних передач, що складаються з зовнішнього колеса, оснащеного внутрішніми зубами синусоїдального профілю, та внутрішнього колеса з зовнішніми зубами, де внутрішнє колесо входить в зачеплення з зовнішнім колесом трьома і більше парами зубів і може бути використана в приводах машин, агрегатів та механізмів для передачі силового навантаження з підвищеним крутним моментом та малим рівнем шумів. Відома планетарна передача, що містить зовнішнє колесо з внутрішніми зубами і взаємодіючий з ним сателіт з зовнішніми зубами. Зовнішнє колесо і сателіт мають малу різницю чисел зубів (менше 6), а їхнє зачеплення відбувається в багатьох точках області перекриття зубів і утворюють лінію контакту - спіраль Архімеда -, що розташована повністю по один бік від прямої, яка проходить через центри колеса і відповідного сателіта, [па тент США №5505668, М. Кл. F16Н1/32 від 9.04.1996р.]. Така конструкція дозволяє виготовляти редуктори багатопарного зачеплення з довільним модулем і евольвентним профілем зубів, що нарізаються на звичайних зуборізних чи зубодовбальних станках. При обертанні коліс такої передачі поверхня зубів са теліта з евольвентним профілем котиться по поверхні зубів евольвентного профілю зовнішнього колеса. Характерною особливістю відомої ексцентрикової передачі є неефективне використання проміжку між зубами зовнішнього колеса, що проявляється в наявності достатньо великого зазору між контактними поверхнями суміжних зубів колеса. В результаті цього площа профілю зубів сателіта становить не більше 75% площі простору між суміжними зубами зовнішнього колеса. Це обумовлює необхідність зменшення товщини зубів сателіта, яка повинна бути в 1,3-1,6 рази менша за їх (13) 78400 (11) UA координатах, a = 0... 2 p - кут розташування точки профілю внутрішнього зуба відносно початку координат. (19) де Ya = f (D)Sin(pW Qg(E)) - рівняння профілю внутрішніх з убів зовнішнього колеса; D - діаметр початкового кола; W - товщина зубів; Е - ексцентриситет; Q - кутове зміщення профілю зуба; f - arctan(dYa / da ); dYa / da - похідна в полярних C2 2 Rb = æ Ya + E2 - 2YaE sin(f - a )ö , ç ÷ è ø 3 78400 висоту. Навантажувальна здатність такої передачі обмежена міцністю на згин зуба, що є крайнім в секторі зачеплення. При навантаженнях такий зуб працює як балка, жорстко закріплена одним кінцем. При цьому основа зуба є місцем, де виникають найбільші напруження згину, що спричиняють появу тріщин в основі зуба, які з часом можуть привести до його поломки. Найбільш близькою до пропонованого рішення є прямозуба планетарна передача [публікація РСТ №WO 98/03804], що містить зовнішнє колесо з внутрішніми зубами синусоїдального профілю і внутрішнє колесо з зовнішніми зубами синусоїдального профілю. Зовнішнє і внутрішнє колеса мають малу різницю чисел зубів (менше одної третини числа зубів зовнішнього колеса), а їхнє зачеплення відбувається в точці, що знаходиться на початковому колі зовнішнього колеса і співпадає з точками перегину синусоїдальних профілів зубів обох коліс. При цьому площа профілю зубів вн утрішнього колеса складає до 99% площі простору між суміжними зубами, що дозволяє використовува ти зуби з товщиною, яка є співрозмірною з їх висотою. При обертанні коліс такої передачі поверхня з синусоїдальним профілем зубів внутрішнього колеса котиться по поверхні зубів з синусоїдальним профілем зовнішнього колеса в дуже малому кутовому секторі, в результаті чого лінії контакту в такій передачі практично не існує, аналогічно, як у відомій передачі Новикова, а коефіцієнт перекриття такої передачі становить не більше 0,5. При використанні такої прямозубої планетарної передачі синусоїдального профілю виникають значні шуми в процесі роботи, зумовлені малим коефіцієнтом перекриття, що призводить до нерівномірності обертання веденого зовнішнього колеса та до швидкого зношування зубів зубчатих коліс, що є наслідком мікроударів контактних поверхонь зубів при нерівномірному рухові веденого колеса по колу. Щоб збільшити коефіцієнт перекриття такої передачі і, відповідно, зменшити рівень шумів та підвищити передаваний крутний момент, необхідно зуби виконувати гвинтовими, що значно ускладнює технологічний процес виготовлення таких передач. Метою пропонованого винаходу є збільшення коефіцієнта перекриття зубів і навантажувальної спроможності прямозубої передачі з синусоїдальним профілем внутрішніх зубів, зменшення рівня шумів в процесі роботи передачі при наявності великої різниці числа зубів внутрішнього та зовнішнього зубчатих коліс. Поставлена мета досягається за рахунок того, що поверхня внутрішніх з убів синусоїдального профілю контактує з поверхнею зовнішніх зубів, профіль яких відрізняється від синусоїдального і визначається умовами руху зубів внутрішнього колеса, а положення точок перегину синусоїдального профілю зубів змінено і розташовано на колі виступів зовнішнього колеса. Поставлена задача вдосконалення планетарної зубчатої передачі, що складається з циліндричного тіла, оснащеного зовнішніми зубами для 4 зачеплення з внутрішніми зубами зовнішнього колеса, в якій внутрішні зуби мають контактну поверхню синусоїдного першого профілю для контакту з зовнішніми зубами, згідно пропозиції досягається за рахунок того, що точки перегину синусоїдального профілю внутрішні х зубів розташовані на колі виступів зовнішнього колеса, а другий профіль зовнішніх зубів відрізняється від першого. Крім того, відповідно до пропозиції початкове коло зовнішнього колеса менше його кола виступів. Крім того, зубчата передача з синусоїдальним першим профілем внутрішніх зубів, відповідно до пропозиції оснащена зовнішніми зубами, другий профіль яких визначається як 2 Rb = (Ya + E2 - 2EYa sin(f - a)) (11) де Ya = f (D)Sin( pW Qg(E)), - рівняння профілю внутрішніх зубів зовнішнього колеса; D - діаметр початкового кола; W - товщина зубів; Ε - ексцентриситет; Q - кутове зміщення профілю зуба; f=arctan(dYa /da); dYa/da - похідна; a=0...2p - кут розташування точки профілю внутрішнього зуба відносно початку полярних координат. Сутність винаходу пояснюється кресленнями, де на Фіг.1 зображено профілі зубів внутрішнього та зовнішнього зубчатих коліс відповідності до пропонованого рішення. На Фіг.2 зображено пропоновану зубчату передачу в повному обсязі. На Фіг.3 зображено фрагмент сектора зачеплення тієї ж самої зубчатої передачі, що і на Фіг.2 в збільшеному масштабі в відповідності до пропонованого рішення. На Фіг.4 показана кінематична схема руху вершин зубів вн утрішнього колеса, що пояснює суть пропонованого технічного рішення. На Фіг.5 показана кінематична схема, що пояснює метод визначення профілю зуба внутрішнього колеса. Запропонована зубчата передача на Фіг.1 містить зовнішній колесо в формі кільця 1 з внутрішніми зубами 2 (показано тільки два зуби 2а та 2б), кількість яких рівна N. Зуби 2 мають контактні профілі 3 та 4, які утворюють простір 5 між суміжними зубами 2а та 2б. Як видно на Фіг.1, контактні профілі 3 і 4 суміжних зубів 2а і 2б являють собою дзеркальні відображення один одного відносно радіальної лінії 6. Профілі 3 і 4 одного і того ж зуба (наприклад, 2б) є також дзеркальними відображеннями один одного відносно радіальної лінії 7, що проходить через середину зуба 2б. Профілі 3 і 4 зустрічаються у внутрішні х точках 8а і 8б з поверхнею, що має круговий профіль 9. Поверхні з профілями 9 всіх зубів утворюють коло 10 виступів зовнішнього колеса 1. Контактний профіль 3 починається в точці 8а і закінчується в верхній точці впадин 11а зовнішнього колеса. Контактний профіль 4 суміжнього зуба 2б починається в точці 8б і закінчується в верхній точці впадин 11б. В сукупності всі точки 11а та 11б утворюють коло 12 впадин зовнішнього колеса 1. 5 78400 Між точками 11а та 11б розташована поверхня впадин 13 колеса 1. Профілі 3 і 4 в відповідності до пропонованого рішення є частинами синусоїди 14а та 14б, які мають точки перегину 8а і 8б, що розташовані на колі 10 виступів зовнішнього колеса 1. Синусоїда 14а має фазовий зсув на величину Q відносно синусоїди 14б для забезпечення відповідної товщини внутрішніх з убів 2 колеса. В відповідності до пропонованого рішення в планетарній передачі контактні профілі 3, 4 мають дотичні прямі 15а та 15б в точках перегину 8а, 8б. При цьому між прямими 15 та прямою 6 існує кут нахилу g. На Фіг.1 внутрішнє з убчате колесо 16 містить циліндричне тіло з отвором в його центрі (на Фіг.1 не показано) для можливості встановлення на валу водила. Внутрішнє колесо 16 має зовнішні зуби 17 (показано тільки один із них) з криволінійними профілями 18 та 19 поверхонь, що контактують з зубами 2 зовнішнього колеса 1. Кількість зубів 17 внутрішнього колеса 16 менша від кількості зубів 2 зовнішнього колеса 1 і становить М. Контактні профілі 18 та 19 одного і того ж зуба 17 є дзеркальним відображенням один одного відносно радіальної прямої 6. Профілі 18 і 19 двох суміжних зубів 17 є також дзеркальним відображенням один одного відносно відповідної радіальної прямої. Профіль 18 зубів 17 починається в точці 20а і закінчується в точці 21а. Профіль 19 починається в точці 20б і закінчується в точці 21б. Між верхніми точками 21а, 21б профілі 18 та 19 обмежені зовнішньою поверхнею, що має профіль 22. Профілі 22 зубів 17 переважно є частинами кола 23 виступів вн утрішнього колеса 16, але можуть мати також іншу конфігурацію. Профілі 18 та 19 продовжуються в напрямі до центру вн утрішнього колеса 16 і обмежуються у внутрішніх точках 20а, 20б поверхнею впадин з профілем 24. Поверхні з профілем 24 всіх впадин зубів 17 разом утворюють коло впадин 25. Точна конфігурація профілю поверхонь 24 може бути довільною, але в більшості випадків вона визначається ріжучим інструментом при виготовленні зубів внутрішнього колеса 16 так, щоб забезпечити відповідний проміжок між зовнішнім 1 та внутрішнім 16 колесами в зібраному стані. В відповідності до пропонованого рішення контактні профілі 18, 19 відрізняються від синусоїдальних і математично задаються в полярних координатах наступним чином: 2 Ra = ( Ya + E2 - 2E * Ya sin(f - a)) , де - Ya математична залежність, що задає профілі 3, 4 внутрішніх зубів 2; E - ексцентриситет розташування внутрішнього колеса 6 відносно зовнішнього 1; f = arctan(dYa / da ); dYa / da похідна; = 0... 2p . a В зібраному стані зубчатої передачі зуб 17 може розташовуватися між зубами 2 всередині проміжку 5, як це зображено на Фіг.1. При цьому профіль 19 зуба 17 контактує із профілем 4 зуба 2б в точці контакту 2б в разі, якщо обертання вну 6 трішнього колеса 16, що передається зовнішньому колеса 1, виконується за годинниковою стрілкою в напрямку А. С уміжний зуб 2а в точці 27 не контактує із зубом 17 внутрішнього колеса 16. В точці 27 існує проміжок величиною в декілька десятих міліметра, щоб усунути тертя між зубами 2 і 17 при обертанні внутрішнього колеса 16 в напрямку стрілки А. Величина вказаного проміжку визначається температурним коефіцієнтом розширення матеріалу коліс 1 та 16 і діапазоном робочих температур зубчатої передачі. В зібраному стані зубчата передача утворює початкові кола 28 та 29 відповідно зовнішнього колеса 1 та внутрішнього колеса 16. Кола 28 та 29 торкаються одне до одного в точці 30 і визначаються в відповідності до фундаментального принципу зачеплення як такі, що котяться одне по одному без ковзання. При цьому положення початкових кіл 28, 29 в відповідності до пропонованого рішення не співпадає з точками перегину 8а та 8б профілів синусоїди внутрішні х зубів 2, а розташовані всередині кола виступів 10 зовнішнього колеса 1. На Фіг.2 запропонована зубчата передача показана в повному обсязі, де зовнішнє колесо 1 має 56 внутрішніх зубів 2 з синусоїдальним контактним профілем, а внутрішній колесо 16 має 28 зовнішніх зубів 17 з криволінійним несинусоїдальним профілем. Різниця чисел зубів складає 28, яка значно більша за дві третини кількості зубів (56*2/3=19) зовнішнього колеса 1. При такій великій різниці числа зубів існує три точки контакту 31, 32, 33 між профілями зубів вн утрішнього 16 та зовнішнього 1 коліс і, отже, коефіцієнт перекриття такої передачі не менший за 2.5, що є першою характерною ознакою пропонованого технічного рішення. Профілі зубів 2 та 17 пропонованої передачі контактують вздовж спіральної кривої 34 лінії контакту, яка розташована по обидві сторони лінії 6, що є другою характерною ознакою пропонованого рішення. Фрагмент сектора зачеплення 35 на Фіг.2 в збільшеному масштабі представлено на Фіг.3, що дозволяє продемонструвати взаємодію внутрішніх зубів 2 синусоїдального профілю в зоні зачеплення з зовнішніми зубами 17 колеса 16. Профілі 3 та 4 внутрішні х зубів 2 є частинами синусоїд 14а та 14б, що зміщена одна відносно одної на величину фазового зсуву Q для забезпечення заданої товщини В (позиція 36) внутрішніх зубів 2. В точках 31, 32, 33 контактні поверхні, що репрезентовані профілями 4 та 19 відповідно зубів 2 та 17 торкаються одна до одної в площині, що є перпендикулярною до прямих 37, дотичних до спіральної лінії контакту 34, тобто повністю відповідає вимогам контакту поверхонь зубів. В точках 27 та 38 на Фіг.3 зуби 2 та 17 в реальних умовах експлуатації не контактують, а розділені тонкою плівкою мастила. Якщо в секторі зачеплення 35 на Фіг.2 нарізати в два рази більше зубів з меншим модулем, то забезпечується одночасний контакт чотирьох і більше пар зубів 2, 17, що, відповідно, призводить до збільшення коефіцієнта перекриття з 2.5 до 4.5. Планетарна зубчата передача працює наступним чином (див. Фіг.4). 7 78400 Взаємодія зовнішнього 1 і внутрішнього 16 коліс відбувається в серповидній області 39 перекриття зубів, що заштри хована на Фіг.4, та обмежується зсередини межами кола виступів 10 зовнішнього колеса 1 та ззовні межами кола виступів 23, що утворене точками вершин зубів 17 внутрішнього колеса 16, одна з яких показана на Фіг.1 та Фіг.4. як точка b. При обертанні внутрішнього колеса 16 навколо центру О2 за годинниковою стрілкою його початкове коло 29 діаметром Di котиться без ковзання по нерухомому початковому колу 28 колеса 1 з діаметром Do. Під час роботи пропонованої передачі центр О2 внутрішнього колеса 16 описує коло діаметром 2*Е, де Ε - ексцентриситет розташування внутрішнього колеса 16 відносно зовнішнього колеса 1. При повороті внутрішнього колеса 16 на деякий довільний кут β за годинниковою стрілкою його центр О2 повертається проти годинникової стрілки навколо осі О1 на кут a і переміщується в положення О'2. Положення початкового кола 29а внутрішнього колеса 16 при повороті на кут β показане на Фіг.4 пунктиром. При цьому точка а (поз. 30 на Фіг.1), що розташована на початковому колі 29 внутрішнього колеса 16, переміщується в положення а', а точка b вершини зуба 17 внутрішнього колеса 16 переміщується в положення b'. Так як перкочування початкового кола 29 по початковому колу 28 відбувається без ковзання, то b=ia, де значення і є передатковим числом зубчатої пари 1 та 16 і визначається із співвідношення: і=Do/Di=N/M. Положення точки b' вершини зуба 17 для довільного кута a визначається із прямокутного трикутника О1Сb' наступним чином: (O1b')2=(O1C)2+(Cb')2 враховуючи те, що O1C=E+(O2b')*cosb=0.5(Do-Di)+(0.5Di+a'b')*cosb= =0.5Do(1-i-1)+0.5Dt*cosb=0.5Do{(1-i-1)+k*cosb}= =0.5Do{(1-i-1)+k*cos(ia)}; Cb'=(O2b')*sinb=(0.5Di+a'b') sinb=0.5kDo*sin(ia). Отримуємо співвідношення для визначення довжини відрізка O1b': O1 ' = 0,5Do (1- i-1)2 + k2 + 2k(1- i- 1) * cos(ai), (12) b що описує рух точки b в системі полярних координат з центром О1, причому k=Dt/Do Dt - діаматер кола виступів 23, утвореного точками вершин 21 зубів; a=0...2p. Таким чином, при обертанні внутрішнього колеса 16 точка b вершини описує траєкторію 40 на Фіг.4, що має математичну назву - гіпотрохоїда. Згідно з пропонованим рішенням кут нахилу /прямої 15а (15б) на Фіг.1 визначається кутом нахилу /прямої 15 на Фіг.4, що є дотичною до гіпо 8 трохоїди 40 в точці d, де гіпотрохоїда 40 перетинає коло виступів 10 колеса 1. Визначення профілю 18 (19) зовнішнього зуба 17 може бути пояснено на прикладі Фіг.5, де профілі внутрішнього 2 та зовнішнього зубів 17 контактують в довільній точці контакту А. Пряма АС є дотичною до профілю зуба 2 в точці А, а пряма ВО1 є паралельною прямій АС, що забезпечує контакт поверхонь зубів в точці А по нормалі АВ в відповідності до вимог зачеплення зубів. Згідно розташування точки А профіль внутрішнього зуба 17 визначається в полярних координатах відносно центру О2 кутом b та довжиною відрізка АО'2 із прямокутного трикутника АО'2В формулою Піфагора, а саме: AO '2 = ( AB 2 + O'2 B2 ). Довжина відрізків АВ та О' 2В визначається через довжину відрізка О1А, кутом f між дотичною АС і горизонталлю CD та величиною ексцентриситету Ε наступним чином: AB = AO 1Sin( p / 2 - f - a ) O' 2 B = AO1Cos(p / 2 - f - a ) - E. Звідки отримаємо, що 2 (13) AO '2 = AO1 + E2 - 2E * AO 1Sin( f - a ) Враховуючи той факт, що профіль 3 зуба 2 визначається рівнянням виду Ya = AO1 = f (D)Sin(p W Qg(E )) (14) де D - діаметр початкового кола 128; W - товщина зубів 102; Ε - ексцентриситет; Q - кутове зміщення профілю зуба 102, а кут f визначається похідною в точці А, тобто f=Arctan(dY/da), після підстановки його значення в формулу (14), отримуємо в результаті співвідношення, що визначає профіль внутрішнього зуба 17, а саме: 2 (15) AO '2 = Rb = (Ya + E2 - 2EYa sin(f - a)) b=Arctan(AB/BO2¢)=Arctan(Yasin(p/2-f-a)/ (Yacos(p/2-f-a)-E)) При цьому похідна dYa / da в точці G на Фіг.8 визначає кут нахилу g профілю 3 внутрішніх зубів 2, тобто: g = p / 2 - Arc tan(dY / d a ) при a = 0 . Запропоноване технічне рішення дозволяє довільно задавати коефіцієнт перекриття в залежності від потреб конструктора в діапазоні 2…5,7 і тим самим збільшити навантажувальну спроможність передачі, як мінімум, в 1,5…2,5 рази в порівнянні з відомою планетарною передачею з синусоїдальним профілем зубів. Дослідно-конструкторський зразок пропонованої передачі виготовлений і дослідженийв складі редуктора. 9 78400 10 11 Комп’ютерна в ерстка Т. Чепелев а 78400 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSinusoidal planetary gearing
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюСинусоидальная планетарная передача
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
Мітки: передача, синусоїдальна, планетарна
Код посилання
<a href="https://ua.patents.su/6-78400-sinusodalna-planetarna-peredacha.html" target="_blank" rel="follow" title="База патентів України">Синусоїдальна планетарна передача</a>
Зубчаста планетарна передача лиховида
Номер патенту: 74983
Опубліковано: 15.02.2006
Автор: Лиховид Юрій Макарович
МПК: F16H 1/10
Мітки: зубчаста, планетарна, передача, лиховида
Формула / Реферат:
1. Планетарна зубчаста передача, що містить зовнішнє колесо (1) з внутрішніми зубами (2) і внутрішнє колесо (15) з зовнішніми зубами (17), що контактують з внутрішніми зубами (2) в більше ніж двох (41, 42, 43) точках, утворюючи криволінійний контактний шлях (44), внутрішні зуби (2) виконані згідно з першим контактним профілем (3, 4), яка відрізняється тим, що зовнішні зуби (17) виконані згідно з другим контактним профілем (18, 19), що має...
Синусоїдальна зубчата передача благута
Номер патенту: 35691
Опубліковано: 16.04.2001
Автор: Благут Еміль Миколайович
МПК: F16H 1/24
Мітки: зубчата, передача, синусоїдальна, благута
Формула / Реферат:
Синусоїдальна зубчата передача, що містить зубчаті колеса з криволінійними боковими профілями зубів, яка відрізняється тим, що профіль зуба окреслений синусоїдою, віссю абсцис якої є коло певного радіуса, причому в зачепленні бере участь не вся синусоїда, а тільки нижня частина її верхньої (додатньої) вітки, і тільки на цій частині синусоїда збігається з евольвентою при параметрах, що визначаються із залежностей:
Планетарна передача
Номер патенту: 35697
Опубліковано: 16.04.2001
Автор: Бичук Анатолій Володимирович
МПК: F16H 1/36
Мітки: передача, планетарна
Формула / Реферат:
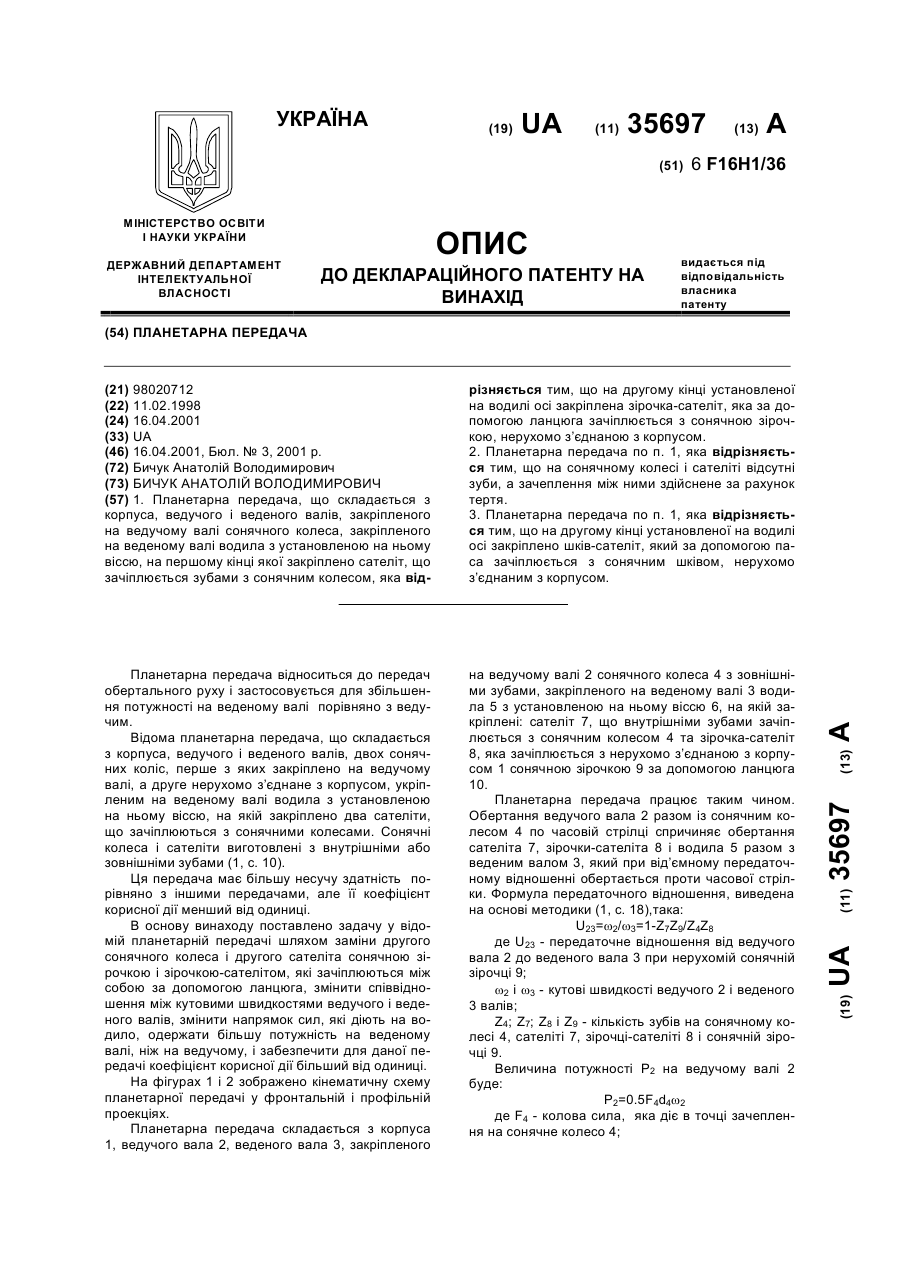
1. Планетарна передача, що складається з корпуса, ведучого і веденого валів, закріпленого на ведучому валі сонячного колеса, закріпленого на веденому валі водила з установленою на ньому віссю, на першому кінці якої закріплено сателіт, що зачіплюється зубами з сонячним колесом, яка відрізняється тим, що на другому кінці установленої на водилі осі закріплена зірочка-сателіт, яка за допомогою ланцюга зачіплюється з сонячною зірочкою, нерухомо...
Планетарна передача
Номер патенту: 30682
Опубліковано: 15.12.2000
Автор: Бичук Анатолій Володимирович
МПК: F16H 1/36
Мітки: планетарна, передача
Формула / Реферат:
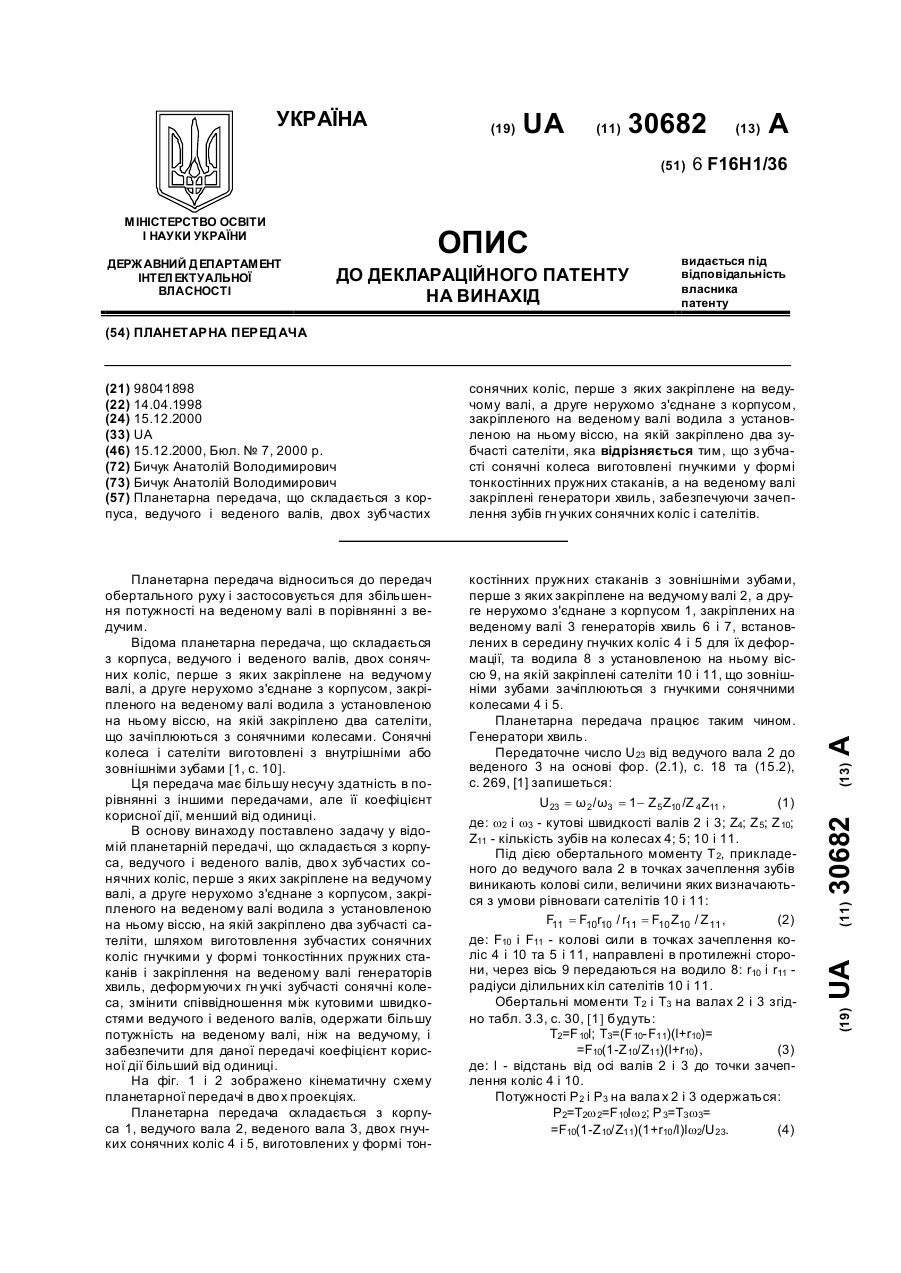
Планетарна передача, що складається з корпуса, ведучого і веденого валів, двох зубчастих сонячних коліс, перше з яких закріплене на ведучому валі, а друге нерухомо з'єднане з корпусом, закріпленого на веденому валі водила з установленою на ньому віссю, на якій закріплено два зубчасті сателіти, яка відрізняється тим, що зубчасті сонячні колеса виготовлені гнучкими у формі тонкостінних пружних стаканів, а на веденому валі закріплені генератори...
Планетарна передача

Номер патенту: 18542
Опубліковано: 15.11.2006
Автор: Бичук Анатолій Володимирович
МПК: F16H 1/36
Мітки: передача, планетарна
Формула / Реферат:
Планетарна передача, що складається з корпуса, ведучого і веденого валів, закріпленого на веденому валу першого сонячного колеса та з'єднаного з ведучим валом водила з установленою на ньому першою віссю із закріпленими на ній двома сателітами, перший з яких зачіплюється з першим сонячним колесом, яка відрізняється тим, що на водилі установлена друга вісь із закріпленим на ній котком, встановленим всередину циліндричної порожнини другого...
Попередній патент: Аеродинамічна труба
Наступний патент: Спосіб одержання 4-бром-1,8-нафталіндикарбонової кислоти
Випадковий патент: Спосіб прогнозування зрощення перелому