Планетарна передача лиховида

Формула / Реферат
1. Планетарна передача, що містить зовнішнє колесо (1) з внутрішніми зубами (2) і внутрішнє колесо (16) з зовнішніми зубами (17), перші профілі (18,19) яких окреслені кривою і контактують з другими профілями (3,4) внутрішніх зубів (2), яка відрізняється тим, що другі профілі (3,4) внутрішніх зубів (2) зовнішнього колеса (1) виконані прямолінійними.
2. Планетарна передача за п. 1, яка відрізняється тим, що діаметр Do початкового кола (31) зовнішнього колеса (1) визначається діаметром De його кола виступів (10) як Do=De·K, де К - безрозмірний коефіцієнт, що знаходиться в межах від 0,5 до 1,0.
3. Планетарна передача за п. 1, яка відрізняється тим, що діаметр De кола виступів (10) зовнішнього колеса (1) визначається діаметром Do його кола початкового кола (31) як De=Do·K, де К - безрозмірний коефіцієнт, що знаходиться в межах від 1,0 до 2,0.
Текст
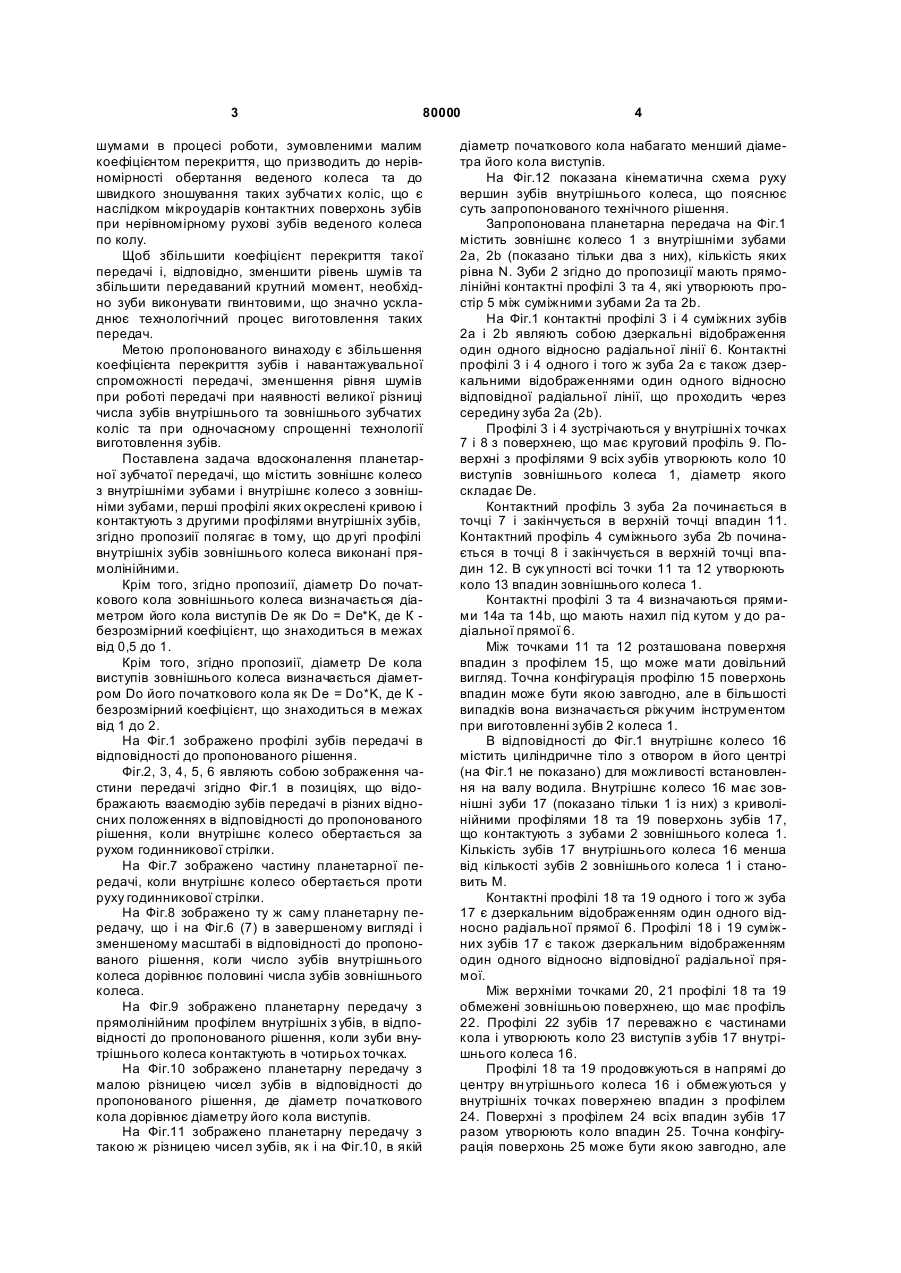
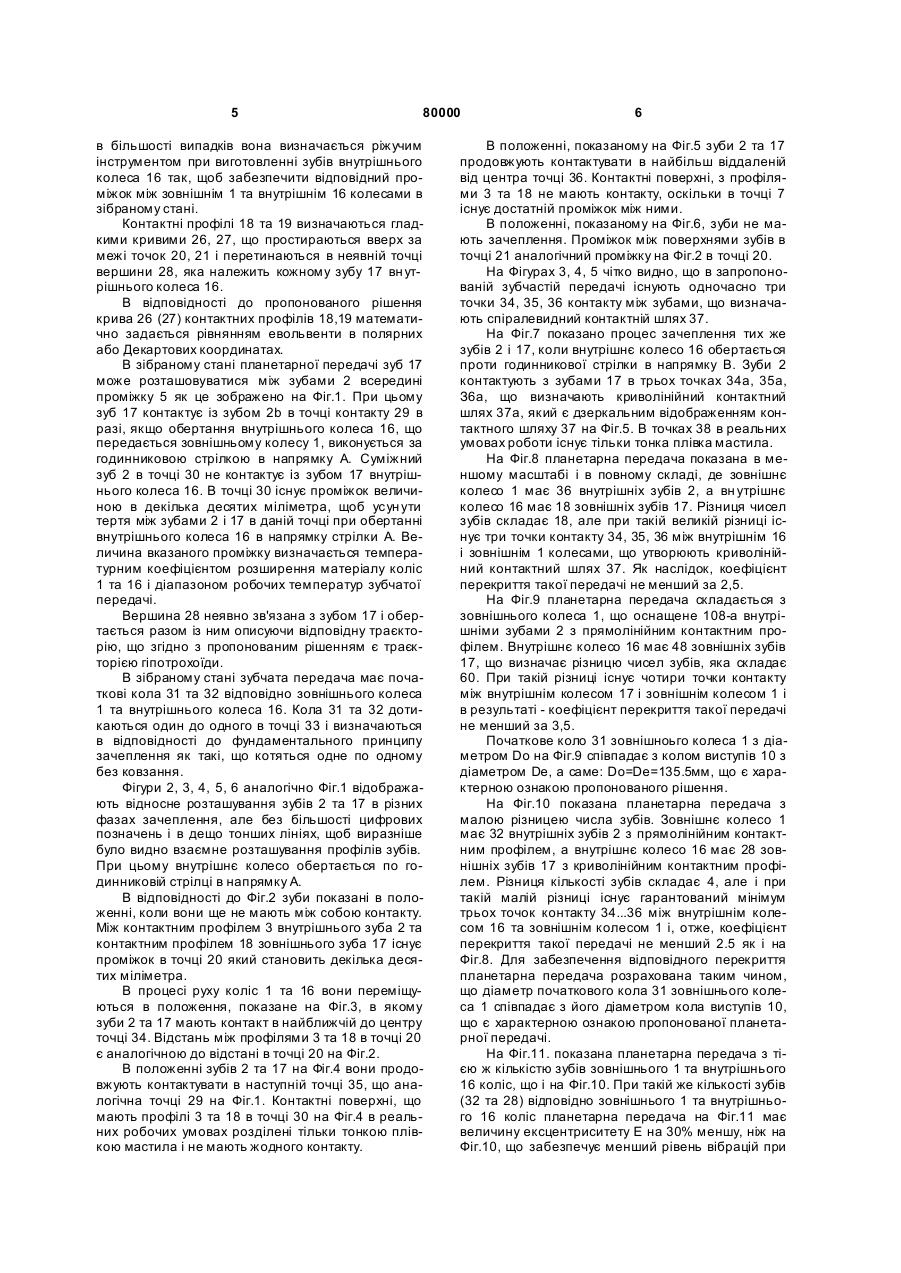
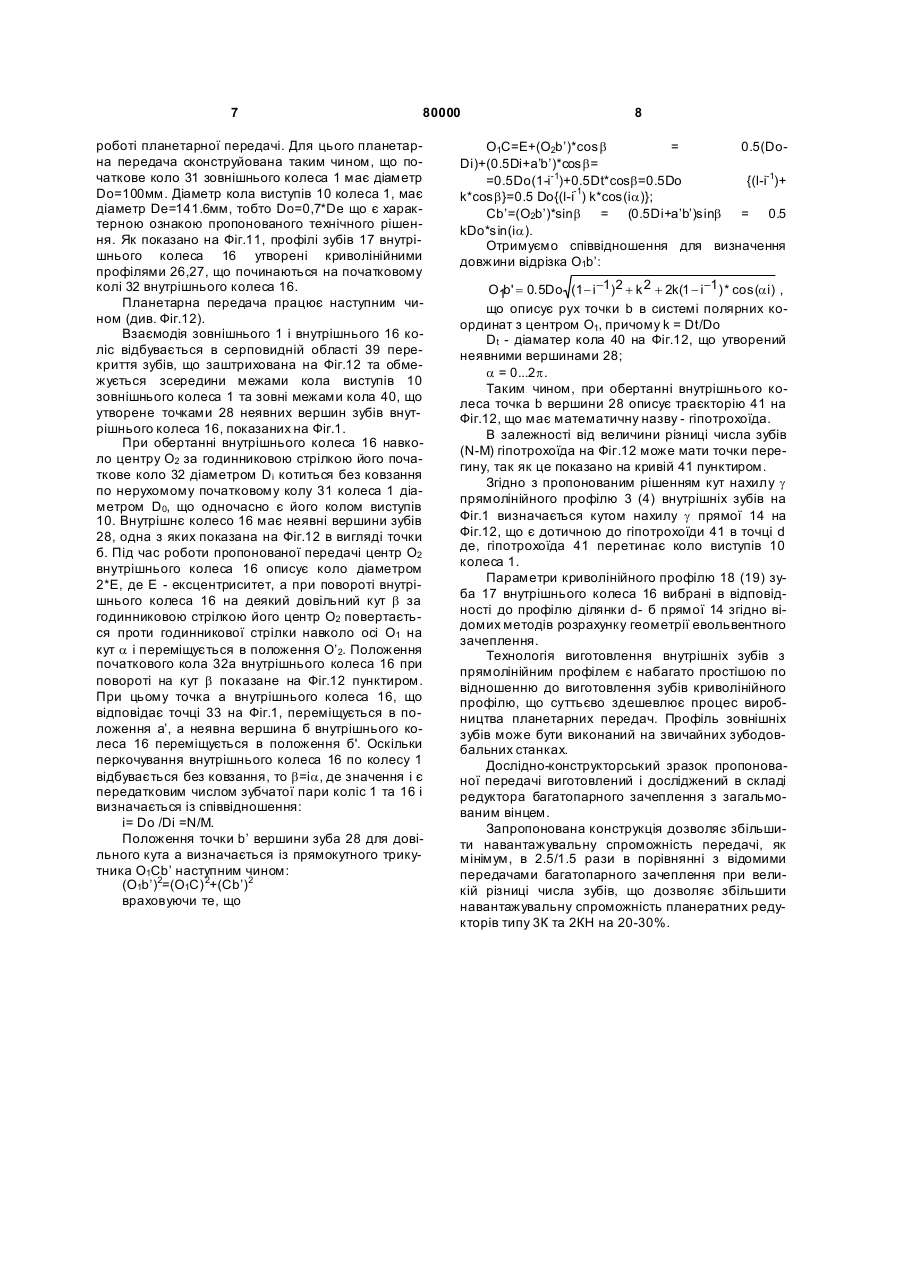
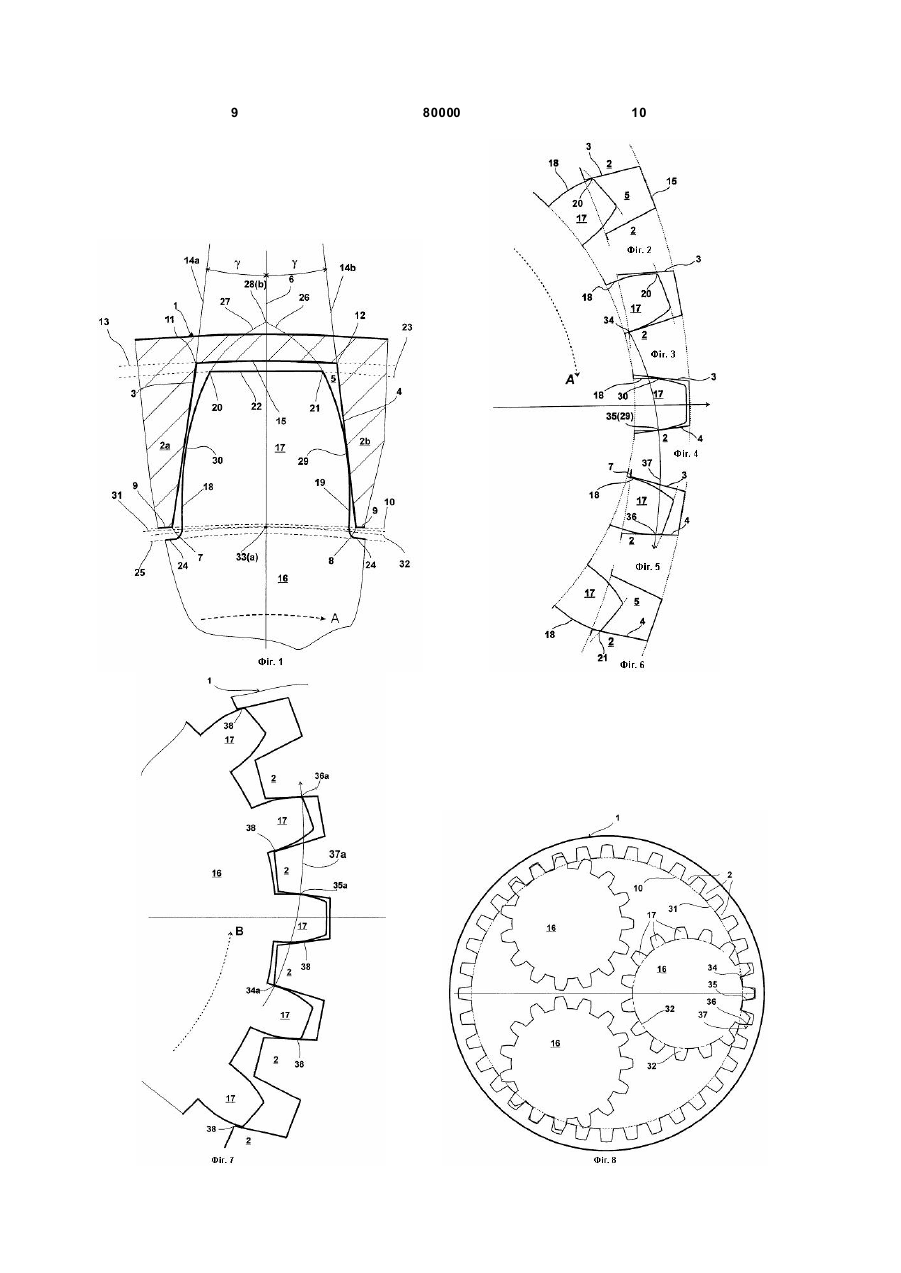
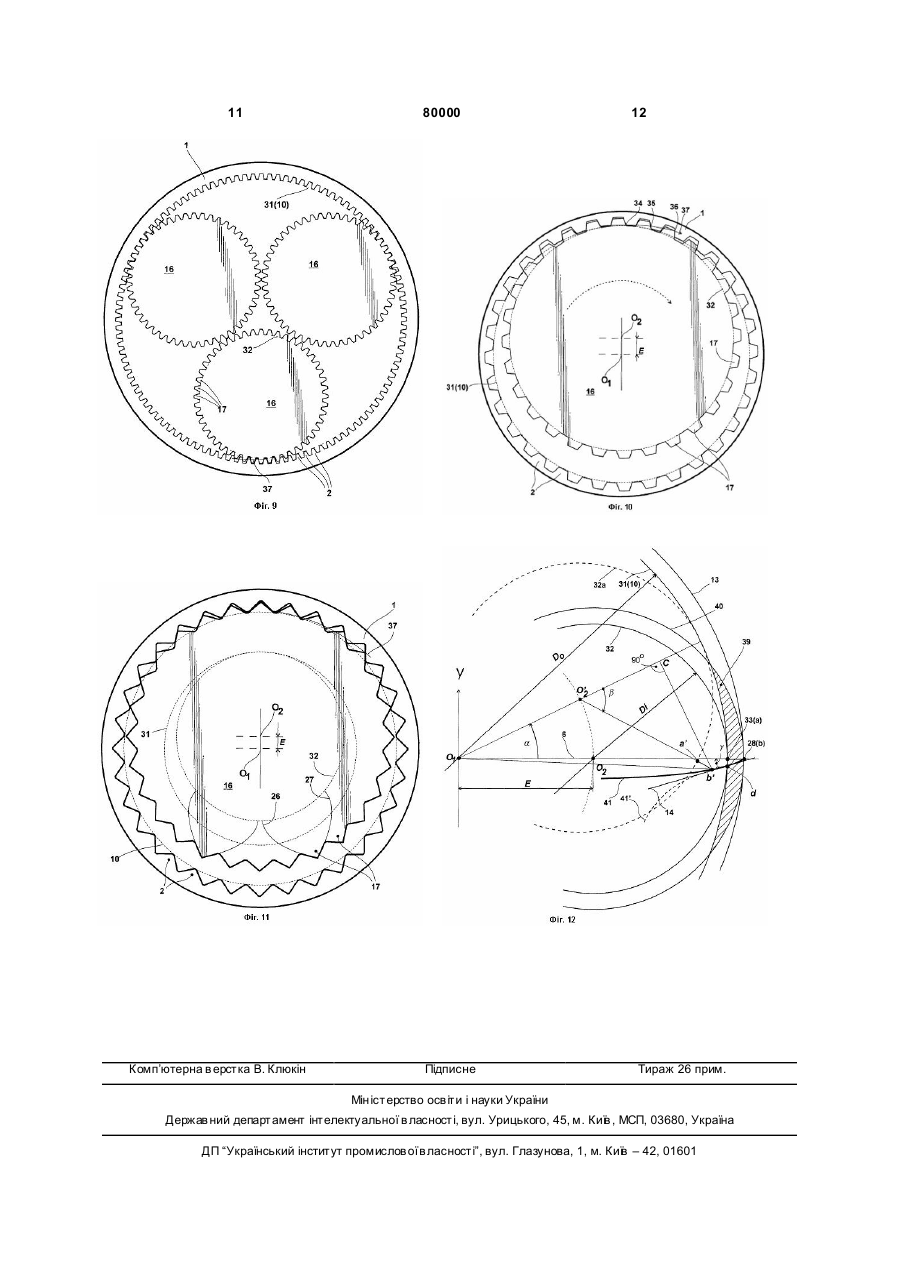
1. Планетарна передача, що містить зовнішнє колесо (1) з внутрішніми зубами (2) і внутрішнє колесо (16) з зовнішніми зубами (17), перші профілі (18,19) яких окреслені кривою і контактують з другими профілями (3,4) внутрішніх зубів (2), яка відрізняє ться тим, що другі профілі (3,4) внутрі 3 80000 шумами в процесі роботи, зумовленими малим коефіцієнтом перекриття, що призводить до нерівномірності обертання веденого колеса та до швидкого зношування таких зубчати х коліс, що є наслідком мікроударів контактних поверхонь зубів при нерівномірному рухові зубів веденого колеса по колу. Щоб збільшити коефіцієнт перекриття такої передачі і, відповідно, зменшити рівень шумів та збільшити передаваний крутний момент, необхідно зуби виконувати гвинтовими, що значно ускладнює технологічний процес виготовлення таких передач. Метою пропонованого винаходу є збільшення коефіцієнта перекриття зубів і навантажувальної спроможності передачі, зменшення рівня шумів при роботі передачі при наявності великої різниці числа зубів внутрішнього та зовнішнього зубчатих коліс та при одночасному спрощенні технології виготовлення зубів. Поставлена задача вдосконалення планетарної зубчатої передачі, що містить зовнішнє колесо з внутрішніми зубами і внутрішнє колесо з зовнішніми зубами, перші профілі яких окреслені кривою і контактують з другими профілями внутрішніх зубів, згідно пропозиії полягає в тому, що др угі профілі внутрішніх зубів зовнішнього колеса виконані прямолінійними. Крім того, згідно пропозиії, діаметр Do початкового кола зовнішнього колеса визначається діаметром його кола виступів De як Do = De*K, де К безрозмірний коефіцієнт, що знаходиться в межах від 0,5 до 1. Крім того, згідно пропозиії, діаметр De кола виступів зовнішнього колеса визначається діаметром Do його початкового кола як De = Do*K, де К безрозмірний коефіцієнт, що знаходиться в межах від 1 до 2. На Фіг.1 зображено профілі зубів передачі в відповідності до пропонованого рішення. Фіг.2, 3, 4, 5, 6 являють собою зображення частини передачі згідно Фіг.1 в позиціях, що відображають взаємодію зубів передачі в різних відносних положеннях в відповідності до пропонованого рішення, коли внутрішнє колесо обертається за рухом годинникової стрілки. На Фіг.7 зображено частину планетарної передачі, коли внутрішнє колесо обертається проти руху годинникової стрілки. На Фіг.8 зображено ту ж саму планетарну передачу, що і на Фіг.6 (7) в завершеному вигляді і зменшеному масштабі в відповідності до пропонованого рішення, коли число зубів внутрішнього колеса дорівнює половині числа зубів зовнішнього колеса. На Фіг.9 зображено планетарну передачу з прямолінійним профілем внутрішніх з убів, в відповідності до пропонованого рішення, коли зуби внутрішнього колеса контактують в чотирьох точках. На Фіг.10 зображено планетарну передачу з малою різницею чисел зубів в відповідності до пропонованого рішення, де діаметр початкового кола дорівнює діаметру його кола виступів. На Фіг.11 зображено планетарну передачу з такою ж різницею чисел зубів, як і на Фіг.10, в якій 4 діаметр початкового кола набагато менший діаметра його кола виступів. На Фіг.12 показана кінематична схема руху вершин зубів внутрішнього колеса, що пояснює суть запропонованого технічного рішення. Запропонована планетарна передача на Фіг.1 містить зовнішнє колесо 1 з внутрішніми зубами 2а, 2b (показано тільки два з них), кількість яких рівна N. Зуби 2 згідно до пропозиції мають прямолінійні контактні профілі 3 та 4, які утворюють простір 5 між суміжними зубами 2а та 2b. На Фіг.1 контактні профілі 3 і 4 суміжних зубів 2а і 2b являють собою дзеркальні відображення один одного відносно радіальної лінії 6. Контактні профілі 3 і 4 одного і того ж зуба 2а є також дзеркальними відображеннями один одного відносно відповідної радіальної лінії, що проходить через середину зуба 2а (2b). Профілі 3 і 4 зустрічаються у внутрішні х точках 7 і 8 з поверхнею, що має круговий профіль 9. Поверхні з профілями 9 всіх зубів утворюють коло 10 виступів зовнішнього колеса 1, діаметр якого складає De. Контактний профіль 3 зуба 2а починається в точці 7 і закінчується в верхній точці впадин 11. Контактний профіль 4 суміжнього зуба 2b починається в точці 8 і закінчується в верхній точці впадин 12. В сук упності всі точки 11 та 12 утворюють коло 13 впадин зовнішнього колеса 1. Контактні профілі 3 та 4 визначаються прямими 14а та 14b, що мають нахил під кутом у до радіальної прямої 6. Між точками 11 та 12 розташована поверхня впадин з профілем 15, що може мати довільний вигляд. Точна конфігурація профілю 15 поверхонь впадин може бути якою завгодно, але в більшості випадків вона визначається ріжучим інструментом при виготовленні зубів 2 колеса 1. В відповідності до Фіг.1 внутрішнє колесо 16 містить циліндричне тіло з отвором в його центрі (на Фіг.1 не показано) для можливості встановлення на валу водила. Внутрішнє колесо 16 має зовнішні зуби 17 (показано тільки 1 із них) з криволінійними профілями 18 та 19 поверхонь зубів 17, що контактують з зубами 2 зовнішнього колеса 1. Кількість зубів 17 внутрішнього колеса 16 менша від кількості зубів 2 зовнішнього колеса 1 і становить М. Контактні профілі 18 та 19 одного і того ж зуба 17 є дзеркальним відображенням один одного відносно радіальної прямої 6. Профілі 18 і 19 суміжних зубів 17 є також дзеркальним відображенням один одного відносно відповідної радіальної прямої. Між верхніми точками 20, 21 профілі 18 та 19 обмежені зовнішньою поверхнею, що має профіль 22. Профілі 22 зубів 17 переважно є частинами кола і утворюють коло 23 виступів з убів 17 внутрішнього колеса 16. Профілі 18 та 19 продовжуються в напрямі до центру вн утрішнього колеса 16 і обмежуються у внутрішніх точках поверхнею впадин з профілем 24. Поверхні з профілем 24 всіх впадин зубів 17 разом утворюють коло впадин 25. Точна конфігурація поверхонь 25 може бути якою завгодно, але 5 80000 в більшості випадків вона визначається ріжучим інструментом при виготовленні зубів внутрішнього колеса 16 так, щоб забезпечити відповідний проміжок між зовнішнім 1 та внутрішнім 16 колесами в зібраному стані. Контактні профілі 18 та 19 визначаються гладкими кривими 26, 27, що простираються вверх за межі точок 20, 21 і перетинаються в неявній точці вершини 28, яка належить кожному зубу 17 вн утрішнього колеса 16. В відповідності до пропонованого рішення крива 26 (27) контактних профілів 18,19 математично задається рівнянням евольвенти в полярних або Декартових координатах. В зібраному стані планетарної передачі зуб 17 може розташовуватися між зубами 2 всередині проміжку 5 як це зображено на Фіг.1. При цьому зуб 17 контактує із зубом 2b в точці контакту 29 в разі, якщо обертання внутрішнього колеса 16, що передається зовнішньому колесу 1, виконується за годинниковою стрілкою в напрямку А. Суміжний зуб 2 в точці 30 не контактує із зубом 17 внутрішнього колеса 16. В точці 30 існує проміжок величиною в декілька десятих міліметра, щоб усун ути тертя між зубами 2 і 17 в даній точці при обертанні внутрішнього колеса 16 в напрямку стрілки А. Величина вказаного проміжку визначається температурним коефіцієнтом розширення матеріалу коліс 1 та 16 і діапазоном робочих температур зубчатої передачі. Вершина 28 неявно зв'язана з зубом 17 і обертається разом із ним описуючи відповідну траєкторію, що згідно з пропонованим рішенням є траєкторією гіпотрохоїди. В зібраному стані зубчата передача має початкові кола 31 та 32 відповідно зовнішнього колеса 1 та внутрішнього колеса 16. Кола 31 та 32 дотикаються один до одного в точці 33 і визначаються в відповідності до фундаментального принципу зачеплення як такі, що котяться одне по одному без ковзання. Фігури 2, 3, 4, 5, 6 аналогічно Фіг.1 відображають відносне розташування зубів 2 та 17 в різних фазах зачеплення, але без більшості цифрових позначень і в дещо тонших лініях, щоб виразніше було видно взаємне розташування профілів зубів. При цьому внутрішнє колесо обертається по годинниковій стрілці в напрямку А. В відповідності до Фіг.2 зуби показані в положенні, коли вони ще не мають між собою контакту. Між контактним профілем 3 внутрішнього зуба 2 та контактним профілем 18 зовнішнього зуба 17 існує проміжок в точці 20 який становить декілька десятих міліметра. В процесі руху коліс 1 та 16 вони переміщуються в положення, показане на Фіг.3, в якому зуби 2 та 17 мають контакт в найближчій до центру точці 34. Відстань між профілями 3 та 18 в точці 20 є аналогічною до відстані в точці 20 на Фіг.2. В положенні зубів 2 та 17 на Фіг.4 вони продовжують контактувати в наступній точці 35, що аналогічна точці 29 на Фіг.1. Контактні поверхні, що мають профілі 3 та 18 в точці 30 на Фіг.4 в реальних робочих умовах розділені тільки тонкою плівкою мастила і не мають жодного контакту. 6 В положенні, показаному на Фіг.5 зуби 2 та 17 продовжують контактувати в найбільш віддаленій від центра точці 36. Контактні поверхні, з профілями 3 та 18 не мають контакту, оскільки в точці 7 існує достатній проміжок між ними. В положенні, показаному на Фіг.6, зуби не мають зачеплення. Проміжок між поверхнями зубів в точці 21 аналогічний проміжку на Фіг.2 в точці 20. На Фігурах 3, 4, 5 чітко видно, що в запропонованій зубчастій передачі існують одночасно три точки 34, 35, 36 контакту між зубами, що визначають спіралевидний контактній шлях 37. На Фіг.7 показано процес зачеплення тих же зубів 2 і 17, коли внутрішнє колесо 16 обертається проти годинникової стрілки в напрямку В. Зуби 2 контактують з зубами 17 в трьох точках 34а, 35а, З6а, що визначають криволінійний контактний шлях 37а, який є дзеркальним відображенням контактного шляху 37 на Фіг.5. В точках 38 в реальних умовах роботи існує тільки тонка плівка мастила. На Фіг.8 планетарна передача показана в меншому масштабі і в повному складі, де зовнішнє колесо 1 має 36 внутрішніх зубів 2, а вн утрішнє колесо 16 має 18 зовнішніх зубів 17. Різниця чисел зубів складає 18, але при такій великій різниці існує три точки контакту 34, 35, 36 між внутрішнім 16 і зовнішнім 1 колесами, що утворюють криволінійний контактний шлях 37. Як наслідок, коефіцієнт перекриття такої передачі не менший за 2,5. На Фіг.9 планетарна передача складається з зовнішнього колеса 1, що оснащене 108-а внутрішніми зубами 2 з прямолінійним контактним профілем. Внутрішнє колесо 16 має 48 зовнішніх зубів 17, що визначає різницю чисел зубів, яка складає 60. При такій різниці існує чотири точки контакту між внутрішнім колесом 17 і зовнішнім колесом 1 і в результаті - коефіцієнт перекриття такої передачі не менший за 3,5. Початкове коло 31 зовнішноьго колеса 1 з діаметром Do на Фіг.9 співпадає з колом виступів 10 з діаметром De, а саме: Do=De=135.5мм, що є характерною ознакою пропонованого рішення. На Фіг.10 показана планетарна передача з малою різницею числа зубів. Зовнішнє колесо 1 має 32 внутрішніх зубів 2 з прямолінійним контактним профілем, а внутрішнє колесо 16 має 28 зовнішніх зубів 17 з криволінійним контактним профілем. Різниця кількості зубів складає 4, але і при такій малій різниці існує гарантований мінімум трьох точок контакту 34...36 між внутрішнім колесом 16 та зовнішнім колесом 1 і, отже, коефіцієнт перекриття такої передачі не менший 2.5 як і на Фіг.8. Для забезпечення відповідного перекриття планетарна передача розрахована таким чином, що діаметр початкового кола 31 зовнішнього колеса 1 співпадає з його діаметром кола виступів 10, що є характерною ознакою пропонованої планетарної передачі. На Фіг.11. показана планетарна передача з тією ж кількістю зубів зовнішнього 1 та внутрішнього 16 коліс, що і на Фіг.10. При такій же кількості зубів (32 та 28) відповідно зовнішнього 1 та внутрішнього 16 коліс планетарна передача на Фіг.11 має величину ексцентриситету Е на 30% меншу, ніж на Фіг.10, що забезпечує менший рівень вібрацій при 7 80000 роботі планетарної передачі. Для цього планетарна передача сконструйована таким чином, що початкове коло 31 зовнішнього колеса 1 має діаметр Do=100мм. Діаметр кола виступів 10 колеса 1, має діаметр Dе=141.6мм, тобто Do=0,7*De що є характерною ознакою пропонованого технічного рішення. Як показано на Фіг.11, профілі зубів 17 внутрішнього колеса 16 утворені криволінійними профілями 26,27, що починаються на початковому колі 32 внутрішнього колеса 16. Планетарна передача працює наступним чином (див. Фіг.12). Взаємодія зовнішнього 1 і внутрішнього 16 коліс відбувається в серповидній області 39 перекриття зубів, що заштрихована на Фіг.12 та обмежується зсередини межами кола виступів 10 зовнішнього колеса 1 та зовні межами кола 40, що утворене точками 28 неявних вершин зубів внутрішнього колеса 16, показаних на Фіг.1. При обертанні внутрішнього колеса 16 навколо центру О2 за годинниковою стрілкою його початкове коло 32 діаметром Di котиться без ковзання по нерухомому початковому колу 31 колеса 1 діаметром D0, що одночасно є його колом виступів 10. Внутрішнє колесо 16 має неявні вершини зубів 28, одна з яких показана на Фіг.12 в вигляді точки б. Під час роботи пропонованої передачі центр О2 внутрішнього колеса 16 описує коло діаметром 2*Е, де Е - ексцентриситет, а при повороті внутрішнього колеса 16 на деякий довільний кут b за годинниковою стрілкою його центр О2 повертається проти годинникової стрілки навколо осі О1 на кут a і переміщується в положення О’2. Положення початкового кола 32а внутрішнього колеса 16 при повороті на кут b показане на Фіг.12 пунктиром. При цьому точка а внутрішнього колеса 16, що відповідає точці 33 на Фіг.1, переміщується в положення а’, а неявна вершина б внутрішнього колеса 16 переміщується в положення б'. Оскільки перкочування внутрішнього колеса 16 по колесу 1 відбувається без ковзання, то b=іa, де значення і є передатковим числом зубчатої пари коліс 1 та 16 і визначається із співвідношення: і= Do /Di =N/M. Положення точки b’ вершини зуба 28 для довільного кута а визначається із прямокутного трикутника О1Сb’ наступним чином: (O1b’)2=(O1C) 2+(Cb’)2 враховуючи те, що 8 O1C=E+(O2b’)*cosb = 0.5(DoDi)+(0.5Di+a’b’)*cosb= =0.5Do(1-і-1)+0.5Dt*cosb=0.5Do {(l-i-1)+ -1 k*cosb}=0.5 Do{(l-i ) k*cos(іa)}; Cb’=(O2b’)*sinb = (0.5Di+a’b’)sinb = 0.5 kDo*sin(ia). Отримуємо співвідношення для визначення довжини відрізка O1b’: O1 ' = 0. 5Do (1- i-1)2 + k 2 + 2k(1 - i-1) * cos(a i) , b що описує рух точки b в системі полярних координат з центром О1, причому k = Dt/Do Dt - діаматер кола 40 на Фіг.12, що утворений неявними вершинами 28; a = 0...2p. Таким чином, при обертанні внутрішнього колеса точка b вершини 28 описує траєкторію 41 на Фіг.12, що має математичну назву - гіпотрохоїда. В залежності від величини різниці числа зубів (N-M) гіпотрохоїда на Фіг.12 може мати точки перегину, так як це показано на кривій 41 пунктиром. Згідно з пропонованим рішенням кут нахилу g прямолінійного профілю 3 (4) внутрішніх зубів на Фіг.1 визначається кутом нахилу g прямої 14 на Фіг.12, що є дотичною до гіпотрохоїди 41 в точці d де, гіпотрохоїда 41 перетинає коло виступів 10 колеса 1. Параметри криволінійного профілю 18 (19) зуба 17 внутрішнього колеса 16 вибрані в відповідності до профілю ділянки d- б прямої 14 згідно відомих методів розрахунку геометрії евольвентного зачеплення. Технологія виготовлення внутрішніх зубів з прямолінійним профілем є набагато простішою по відношенню до виготовлення зубів криволінійного профілю, що суттьєво здешевлює процес виробництва планетарних передач. Профіль зовнішніх зубів може бути виконаний на звичайних зубодовбальних станках. Дослідно-конструкторський зразок пропонованої передачі виготовлений і досліджений в складі редуктора багатопарного зачеплення з загальмованим вінцем. Запропонована конструкція дозволяє збільшити навантажувальну спроможність передачі, як мінімум, в 2.5/1.5 рази в порівнянні з відомими передачами багатопарного зачеплення при великій різниці числа зубів, що дозволяє збільшити навантажувальну спроможність планератних редукторів типу 3К та 2КН на 20-30%. 9 80000 10 11 Комп’ютерна в ерстка В. Клюкін 80000 Підписне 12 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLykhovyd planetary gearing
Автори англійськоюLykhovyd Yurii Makarovych
Назва патенту російськоюПланетарная передача лиховида
Автори російськоюЛиховид Юрий Макарович
МПК / Мітки
Мітки: планетарна, передача, лиховида
Код посилання
<a href="https://ua.patents.su/6-80000-planetarna-peredacha-likhovida.html" target="_blank" rel="follow" title="База патентів України">Планетарна передача лиховида</a>
Зубчаста планетарна передача лиховида
Номер патенту: 74983
Опубліковано: 15.02.2006
Автор: Лиховид Юрій Макарович
МПК: F16H 1/10
Мітки: лиховида, передача, зубчаста, планетарна
Формула / Реферат:
1. Планетарна зубчаста передача, що містить зовнішнє колесо (1) з внутрішніми зубами (2) і внутрішнє колесо (15) з зовнішніми зубами (17), що контактують з внутрішніми зубами (2) в більше ніж двох (41, 42, 43) точках, утворюючи криволінійний контактний шлях (44), внутрішні зуби (2) виконані згідно з першим контактним профілем (3, 4), яка відрізняється тим, що зовнішні зуби (17) виконані згідно з другим контактним профілем (18, 19), що має...
Зубчаста передача лиховида
Номер патенту: 78841
Опубліковано: 25.04.2007
Автор: Лиховид Юрій Макарович
МПК: F16H 1/10
Мітки: зубчаста, передача, лиховида
Формула / Реферат:
Зубчаcта передача внутрішнього багатопарного зачеплення, що складається із жорстких внутрішнього і зовнішнього зубчастих коліс, осі яких є паралельними, а вісь внутрішнього зубчастого колеса зміщена в площині зачеплення відносно свого номінального положення на величину А, що визначається із співвідношення: A=KE+L, де: Е - величина розрахункової міжосьової відстані; К -...
Безступенева планетарна передача
Номер патенту: 73305
Опубліковано: 15.07.2005
Автор: Мізін Денис Васильович
МПК: F16H 47/00, F16H 59/04
Мітки: безступенева, передача, планетарна
Формула / Реферат:
Безступенева планетарна передача, що складається із привідного вала, сонячного колеса, коронного колеса, водила з сателітами, регульованої муфти чи гідротрансформатора, яка відрізняється тим, що дві ланки передачі, наприклад привідний вал і коронне колесо, з'єднані між собою за допомогою регульованої муфти чи гідротрансформатора, які мають здатність змінювати величину переданого крутного моменту.
Синусоїдальна планетарна передача
Номер патенту: 78400
Опубліковано: 15.03.2007
Автор: Лиховид Юрій Макарович
Мітки: передача, синусоїдальна, планетарна
Формула / Реферат:
1. Синусоїдальна планетарна передача, що складається з циліндричного тіла (16), оснащеного зовнішніми зубами (17) для зачеплення з внутрішніми зубами (2) зовнішнього колеса (1), в якій внутрішні зуби (2) мають контактну поверхню першого синусоїдального профілю (3,4) для контакту з зовнішніми зубами (17), яка відрізняється тим, що точки перегину (8) синусоїдального профілю (3,4) внутрішніх зубів (2) розташовані на колі виступів (10)...
Планетарна передача

Номер патенту: 20421
Опубліковано: 15.01.2007
Автор: Бичук Анатолій Володимирович
МПК: F16H 1/36
Мітки: передача, планетарна
Формула / Реферат:
Планетарна передача, що складається з корпусу, двох валів, гнучкого колеса, закріпленого на корпусі першого сонячного колеса, закріпленого на другому валу другого сонячного колеса, закріпленого на першому валу водила з установленими на ньому осями із закріпленими на них котками, забезпечуючими зачеплення гнучкого колеса із першим сонячним колесом, яка відрізняється тим, що гнучке колесо виготовлене з окремих ланок, сполучених шарнірно між...
Попередній патент: Кривошипний редуктор
Наступний патент: Спосіб виробництва цементу з мінеральними домішками зі зменшеними викидами діоксиду вуглецю
Випадковий патент: Спосіб проведення гірничої виробки