Спосіб оптимізації перехідного процесу в системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 81526
Опубліковано: 10.01.2008
Автори: Стеба Олександр Михайлович, Корсун Валентин Петрович, Мотуз Георгій Іванович, Кралін Володимир Всеволодович
Формула / Реферат
1. Спосіб оптимізації перехідного процесу в системі автоматичного регулювання, що базується на формуванні коректуючого сигналу за умов стрибкоподібної зміни координати вхідної дії, який відрізняється тим, що формують перший сигнал, пропорційний різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та другий сигнал, пропорційний модулю різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та сигнал, пропорційний модулю сигналу похибки системи, і на часовому відрізку, де значення модуля сигналу похибки системи перевищує значення еталонного сигналу, формують коректуючий сигнал, пропорційний добутку першого та другого сигналів, який складається з сигналом похибки системи.
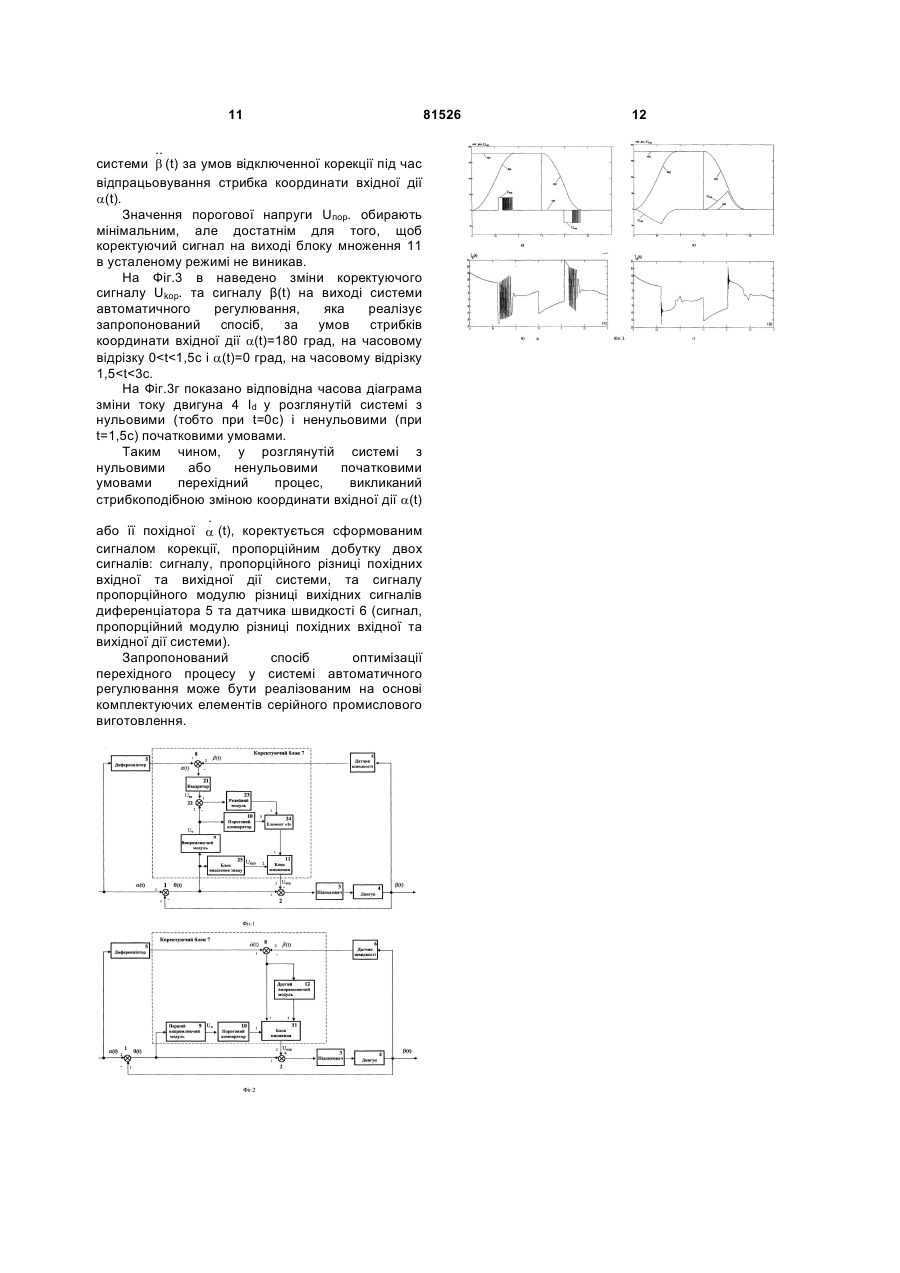
2. Пристрій для оптимізації перехідного процесу в системі автоматичного регулювання, який включає до свого складу вимірювач неузгодженості, перший суматор, підсилювач, двигун, датчик швидкості, диференціатор і коректуючий блок, який включає другий суматор, випрямляючий модуль, пороговий компаратор, та блок множення, при цьому вихід вимірювача неузгодженості через перший випрямляючий модуль підключений до входу порогового компаратора, а також через послідовно з'єднані перший суматор, підсилювач та двигун підключений до інвертуючого першого входу вимірювача неузгодженості, неінвертуючий другий вхід якого через диференціатор з'єднаний з неінвертуючим першим входом другого суматора, інвертуючий другий вхід якого підключений до виходу датчика швидкості, вхід якого з'єднаний з виходом двигуна, який відрізняється тим, що до складу коректуючого блока введено другий випрямляючий модуль, при цьому вихід другого суматора підключений до першого входу блока множення і через другий випрямляючий модуль підключений до другого входу блока множення, третій вхід якого з'єднаний з виходом порогового компаратора, а вихід блока множення підключений до неінвертуючого другого входу першого суматора.
Текст
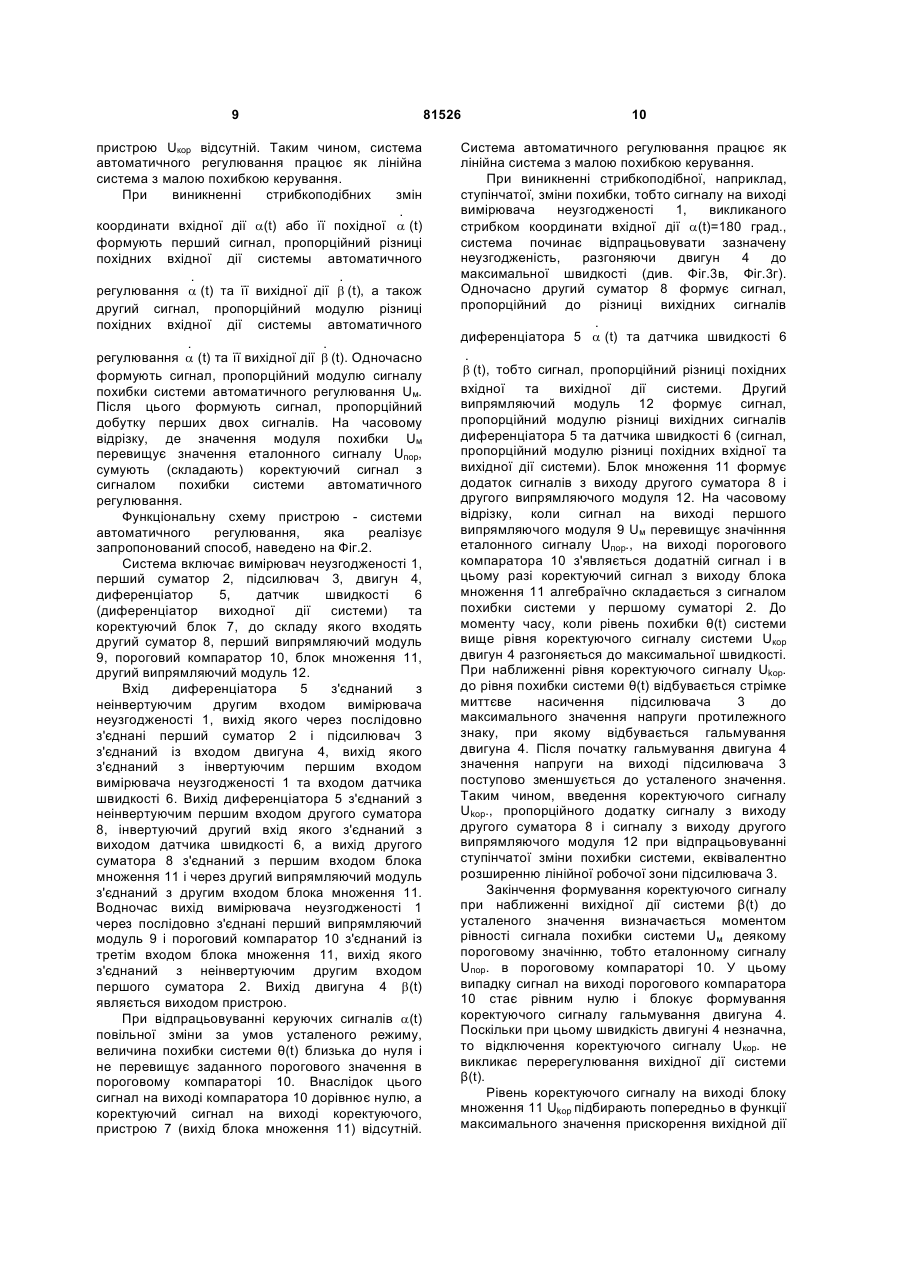
1. Спосіб оптимізації перехідного процесу в системі автоматичного регулювання, що базується на формуванні коректуючого сигналу за умов стрибкоподібної зміни координати вхідної дії, який відрізняється тим, що формують перший сигнал, пропорційний різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та другий сигнал, пропорційний модулю різниці похідних вхідної і вихідної дії системи автоматичного регулювання, та сигнал, пропорційний модулю сигналу похибки системи, і на часовому відрізку, де значення модуля сигналу похибки системи перевищує значення еталонного сигналу, формують коректуючий сигнал, пропорційний добутку першого та другого сигналів, який складається з сигналом похибки системи. C2 2 81526 1 3 коректуючого сигналу відповідної полярності при стрибках величини вхідної дії на систему по результату порівняння двох сформованих сигналів: сигнала, пропорційного квадрату різниці похідних вхідної дії і вихідної дії системи автоматичного регулювання, а також сигнала, пропорційного модулю сигналу похибки системи [див. Патент на винахід №62734 «Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації» Бюл. №8 від 15.08.2005]. Відомий спосіб оптимізації перехідного процесу автори обрали як прототип запропонованого способу оптимізації перехідного процесу в системі автоматичного регулювання, а пристрій, для реалізації цього відомого способа оптимізації, був обраний також, як прототип пристрою для реалізації запропонованого способа [див. Патент на винахід №62734 «Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації» Бюл. №8 від 15.08.2005]. При застосуванні цього відомого способу оптимізації перехідного процесу за умов стрибка координати вхідної дії a(t) формують два сигнала: сигнал, пропорційний квадрату різниці сигналів похідних вхідної і вихідної дії системи автоматичного регулювання, а також сигнал, пропорційний модулю сигналу похибки системи, після чого порівнюють поточні амплітудні значення цих двох сигналів і при перевищенні поточним амплітудним значенням першого сигналу поточного амплітудного значення другого сигналу на часовому відрізку, де значення похибки системи перевищує значення еталонного сигналу, формують коректуючий сигнал в залежності від знаку похибки системи. Недоліком розглянутого способу слід зазначити складність його реалізації, що пов'язана з обробкою сигналу, який становить результат порівняння двох сигналів: сигналу, пропорційного квадрату різниці похідних сигналів вхідної і вихідної дії системи автоматичного регулювання, і сигналу, пропорційного модулю сигналу похибки системи. В основу винаходу поставлено завдання створити такий спосіб оптимізації перехідного процесу в системі автоматичного регулювання і пристрій для його реалізації за умов стрибків координати вхідної дії (або її похідної), за яких величина перерегулювання і тривалість перехідного процесу зменшуються як при нульових, так і при ненульових початкових умовах, при спрощенні пристрія для його реалізації, що поліпшує споживчі властивості системи автоматичного регулювання, наприклад, скорочує час готовності систем озброєння, які використовують такі слідкуючі системи. Завдання зменшення величини перерегулювання і тривалості перехідного процесу при стрибках координати вхідної дії (або її похідної) за нульових або ненульових початкових умов при спрощенні пристрія для його реалізації, розв'язується за рахунок того, що в способі оптимізації перехідного процесу в системі 81526 4 автоматичного регулювання формують перший сигнал, пропорційний різниці похідних сигналів вхідної і вихідної дії системи автоматичного регулювання, другий сигнал, пропорційний модулю різниці похідних сигналів вхідної і вихідної дії системи автоматичного регулювання, а також, сигнал, пропорційний модулю сигналу похибки системи, і на часовому відрізку, де значення модуля сигналу похибки системи перевищує значення еталонного сигналу, формують коректуючий сигнал, пропорційний добутку першого та другого сигналів, який складається з сигналом похибки системи. Пристрій-прототип [Патент на винахід №62734 «Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації» Бюл. №8 від 15.08.2005, див. Фіг.1] складається із замкненого контуру регулювання, який включає вимірювач неузгодженості 1, суматор 2, підсилювач 3, двигун 4, диференціатор 5, датчик швидкості 6, коректуючий блок 7, до складу якого входить другий сумматор 8, випрямляючий модуль 9, пороговий компаратор 10, блок множення 11, квадратор 21, третій суматор 22, релейний модуль 23, елемент «І» 24, блок виділення знаку 25. Вхід диференціатора 5 з'єднаний з неінвертуючим другим входом вимірювача неузгодженості 1, вихід якого через послідовно з'єднані перший сумматор 2 і підсилювач 3 з'єднаний із входом двигуна 4, вихід якого з'єднаний з інвертуючим першим входом вимірювача неузгодженості 1 та входом датчика швидкості 6. Вихід диференціатора 5 з'єднаний з неінвертуючим першим входом другого суматора 8, інвертуючий другий вхід якого з'єднаний з виходом датчика швидкості 6, а вихід - через послідовно з'єднані квадратор 21, третій суматор 22, релейний модуль 23 та елемент «І» 24 з'єднаний з першим входом блоку множення 11, вихід якого з'єднаний з інвертуючим другим входом першого суматора 2. Водночас вихід вимірювача неузгодженості 1 з'єднаний з об'єднаними входами випрямляючого модуля 9 та блока виділення знаку 25, вихід якого з'єднаний із другим входом блока множення 11. Вихід випрямляючого модуля 9 з'єднаний з інвертуючим другим входом третього суматора 22 і через пороговий компаратор 10 з'єднаний з другим входом елемента «І» 24. На Фіг.1 наведені такі позначення сигналів пристрою - прототипу, що розглядається: a(t) - вхідна дія на систему автоматичного регулювання; . a (t) - сигнал похідної від вхідної дії на зазначену систему; β(t) - вихідна (відпрацьована) дія коректованої системи; . b (t) сигнал похідної вихідної (відпрацьованої) дії системи; q(t) - сигнал похибки системи; Uм - сигнал, який формується на виході випрямляючого модуля 9, (модуль похибки); 5 Uкв. - сигнал, який формується на виході квадратора 21; Uпор. - еталонний сигнал (заданий пороговий сигнал) порогового компаратора 10 (на Фіг.1 не показано); Usign - сигнал на виході блока виділення знаку 25; Uкор. - коректуючий сигнал системи (сигнал на виході блока множення 11). При виникненні стрибкоподібної, наприклад, ступінчатої, зміни похибки, тобто сигналу на виході вимірювача неузгодженості 1, викликаного стрибком координати вхідної дії a(t), система починає відпрацьовувати зазначену неузгодженість, разгоняючи двигун 4 до максимальної швидкості. Одночасно другий суматор 8 формує сигнал, пропорційний різниці . вихідних сигналів диференціатора 5 a (t) та . датчика швидкості 6 b (t). Квадратор 21 формує сигнал UKB., пропорційний квадрату різниці вихідних сигналів диференціатора 5 та датчика швидкості 6 (тобто сигнал, пропорційний квадрату різниці похідних вхідної та вихідної дії системи). Третій суматор 22 виконує порівняння амплітудних значінь сигналів на виходах квадратора 21 Uкв і випрямляючого модуля 9 Uм. На часовому відрізку, коли амплітудне значення сигналу на виході квадратора 21 Uкв меньше амплітудного значення сигналу на виході випрямляючого модуля 9 Uм, то сигнал на виході третього суматора 22, який надходить на вхід релейного модуля 23, менше нуля. Відповідно сигнал на виході релейного модуля 23 равний нулю, а це означає, що і сигнали на виходах елемента «І» 24 та блока множення 11 також дорівнюють нулю. Коректуючий сигнал на виході коректуючого блока 7 відсутній. У випадку, коли значення сигналу на виході квадратора 21 Uкв, перебільшує амплітудне значення сигналу на виході випрямляючого модуля 9 Uм, то сигнал на виході третього суматора 22, який надходить на вхід релейного модуля 23, більше нуля. Відповідно на виході релейного модуля 23 з'являється додатний сигнал. На часовому відрізку, коли сигнал на виході випрямляючого модуля 9 Uм перевищує значення еталонного сигналу Uпор., сигнал на виході порогового компаратора 10 має також додатне значіння, а напруга на виході елемента «І» 24 має додатне значіння. Вихідний сигнал блока множення 11 (коректуючий сигнал) при цьому стає відмінним від нуля. В цьому випадку знак коректуючого сигналу, наприклад, прямокутного імпульса, на виході блока множення 11 відповідає знаку сигналу похибки системи, який формується блоком виділення знака 25. Тривалість коректуючого сигналу відповідає відрізку проміжку часу, протягом якого вихідний сигнал на виході квадратора 21 Uкв перевищує поточне значіння сигналу на виході випрямляючого модуля 9 Uм, тобто встановлюється автоматично. Коректуючий сигнал з виходу коректуючого блока 7 алгебраїчно 81526 6 складається із сигналом похибки системи, тобто віднімається від сигналу похибки. Величину напруги коректуючого сигналу на виході блока множення 11 обирають такою, щоб після його вводу підсилювач 3 миттєво насичувався до напруги протилежного знаку, тобто формував тим самим сигнал гальмування двигуна 4. Під час здійснення гальмування двигуна 4 зменшується значіння сигналу на виході квадратора 21, знак сигналу на виході третього суматора 22 знову стає від'ємним, а завдяки цьому, сигнал на виході релейного модуля 23 приймає нульове значення, а коректуючий сигнал на виході блока множення 11 коректуючого блока 7 при цьому відсутній. Двигун 4 за умов надходження на його вхід лише підсиленого сигналу похибки системи знову починає розгін. Сигнал на виході квадратора Uкв починає зростати і, коли його амплітудне значення стає більшим за величину амплітудного значення сигналу на виході випрямляючого модуля 9 Uм, процес гальмування двигуна 4 повторюється. Закінчення формування коректуючого сигналу при наближенні вихідної дії системи b(t) до усталеного значення визначається моментом рівності сигналу похибки системи Uм деякому пороговому значенню, тобто еталонному сигналу Uпор. в пороговому компараторі 10. У цьому випадку сигнал на виході порогового компаратора 10 стає рівним нулю і блокує формування коректуючого сигналу гальмування двигуна 4. При цьому швидкість двигуна 4 незначна і не викликає перерегулювання вихідної дії системи. На, Фіг.3а наведено зміни коректуючого сигналу Ukop та сигналу b(t) нa виході системи автоматичного регулювання, яка реалізує спосібпрототип, за умов стрибків координати вхідної дії a(t)=180 град. на часовому відрізку 0
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for optimization of transition process in system of automated control and appliance for its realization
Автори англійськоюKorsun Valentyn Petrovych, Kralin Volodymyr Vsevolodovych, Motuz Heorhii Ivanovych, Steba Oleksandr Mykhailovych
Назва патенту російськоюСпособ оптимизации переходного процесса в системе автоматической регулировки и устройство для его реализации
Автори російськоюКорсун Валентин Петрович, Кралин Владимир Всеволодович, Мотуз Георгий Иванович, Стеба Александр Михайлович
МПК / Мітки
МПК: G05B 11/01
Мітки: оптимізації, реалізації, процесу, автоматичного, пристрій, спосіб, перехідного, регулювання, системі
Код посилання
<a href="https://ua.patents.su/6-81526-sposib-optimizaci-perekhidnogo-procesu-v-sistemi-avtomatichnogo-regulyuvannya-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб оптимізації перехідного процесу в системі автоматичного регулювання та пристрій для його реалізації</a>
Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 62734
Опубліковано: 15.08.2005
Автори: Кралін Володимир Всеволодович, Мотуз Георгій Іванович, Старков Юрій Володимирович, Демченко Леонтій Іванович, Корсун Валентин Петрович
МПК: G05B 11/00, G05B 11/01
Мітки: оптимізації, системі, процесу, автоматичного, перехідного, реалізації, регулювання, пристрій, спосіб
Формула / Реферат:
Засіб для лікування і профілактики гострих респіраторних хвороб молодняку сільськогосподарських тварин містить тримекаїн, наповнювач, розчинник. Додатково засіб містить тимол, хладон, як наповнювач - гліцерин, як розчинник- спирт етиловий.
Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів чи виробів (парс-тп) та спосіб такого регулювання
Номер патенту: 34060
Опубліковано: 15.04.2003
Автори: Костогриз Кирило Петрович, Русінковський Олег Юрійович, Костогриз Петро Васильович
МПК: F26B 25/22, F26B 21/06, F26B 3/02
Мітки: матеріалів, регулювання, автоматичного, пристрій, парс-тп, сушіння, такого, процесу, прогартовування, виробів, спосіб
Формула / Реферат:
1. Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів або виробів у сушильному агрегаті, що містить вимірювальні пристрої, кожен з яких виконаний у вигляді, принаймні одного датчика, з’єднаного з елементом порівняння, блок керування, із входами якого з’єднані вимірювальні пристрої, а вихід якого зв'язаний з виконавчим механізмом регулювального органа подачі палива у камеру спалювання, при цьому датчик першого...
Спосіб автоматичного регулювання електричного режиму дугової сталеплавильної печі та пристрій для його реалізації
Номер патенту: 61549
Опубліковано: 17.11.2003
Автор: Циганаш Віктор Євграфович
МПК: G05F 1/00
Мітки: печі, дугової, реалізації, спосіб, режиму, пристрій, регулювання, сталеплавильної, автоматичного, електричного
Формула / Реферат:
1. Спосіб автоматичного регулювання електричного режиму дугової сталеплавильної печі, згідно з яким вимірюють струми та напруги дуг печі, перетворюють їх у сигнали, пропорційні вимірюваним параметрам, і подають сигнали на модель силового контуру печі, після чого вимірюють на моделі сигнали, порівнюють їх із заданими та при наявності неузгодженостей змінюють довжини дуг до усунення неузгодженостей, який відрізняється тим, що сигнали,...
Пристрій для автоматичного регулювання процесу освітлення оборотних вод
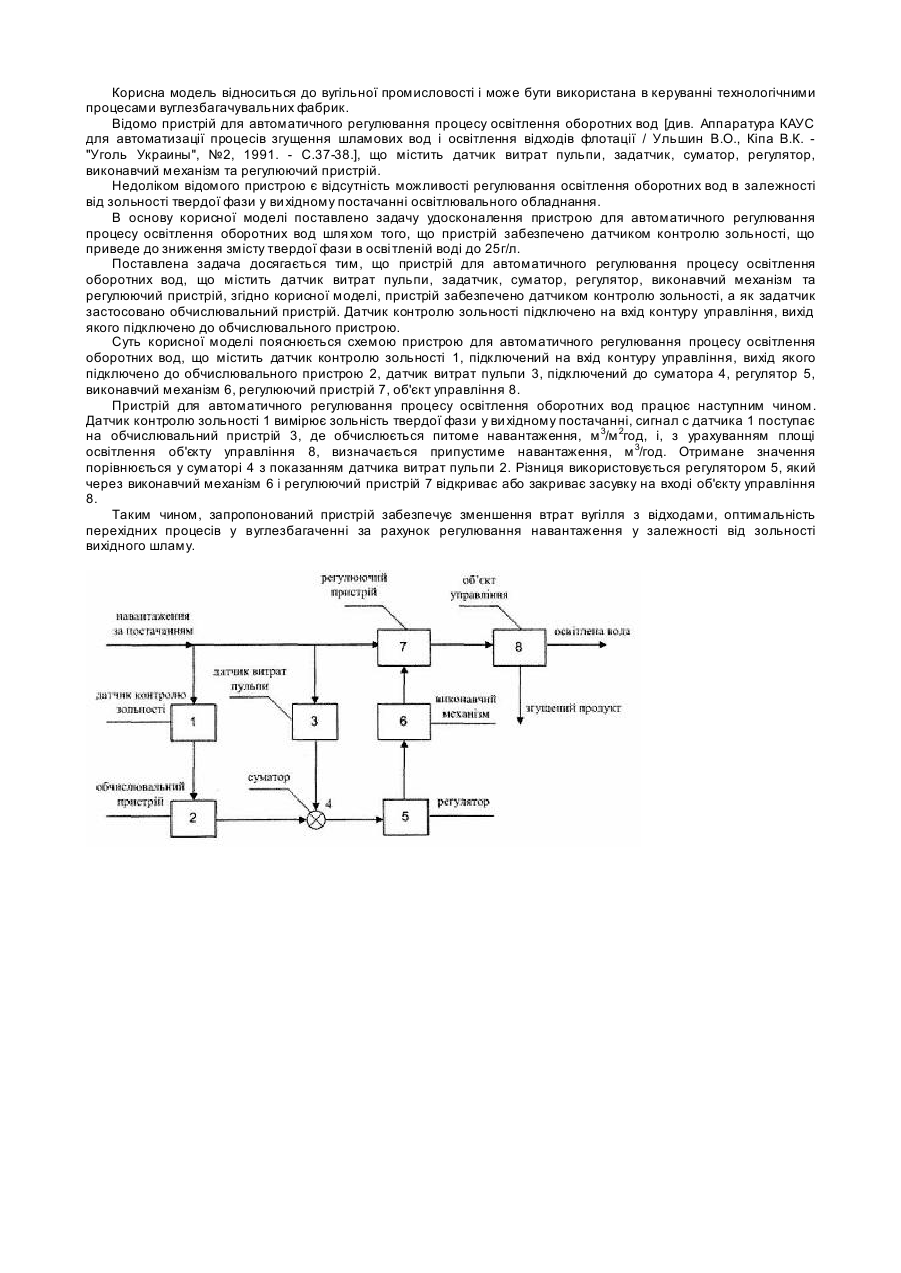
Номер патенту: 22505
Опубліковано: 25.04.2007
Автори: Ульшин Віталій Олександрович, Худяков Віктор Миколайович
МПК: B03B 13/00
Мітки: регулювання, оборотних, автоматичного, процесу, освітлення, вод, пристрій
Формула / Реферат:
Пристрій для автоматичного регулювання процесу освітлення оборотних вод, який містить датчик витрати пульпи, задатчик, суматор, регулятор, виконавчий механізм та регулюючий пристрій, який відрізняється тим, що пристрій забезпечено датчиком контролю зольності, а як задатчик застосовано обчислювальний пристрій, датчик контролю зольності підключено на вхід контуру керування, вихід якого підключено до обчислювального пристрою.
Пристрій для автоматичного регулювання процесу розкочування фарби в друкарських машинах
Номер патенту: 54192
Опубліковано: 17.02.2003
Автори: Бабінець Василь Михайлович, Верхола Михайло Іванович, Гук Ігор Богданович, Никифорук Богдан Васильович
МПК: B41F 31/00
Мітки: друкарських, пристрій, фарби, розкочування, автоматичного, процесу, машинах, регулювання
Формула / Реферат:
Пристрій для автоматичного регулювання процесу розкочування фарби в друкарських машинах, що містить розтиральний циліндр, пазовий кулачок, механічно зв'язаний з валом електродвигуна, вхід якого з'єднаний з блоком керування швидкістю обертання, задавальні елементи перетворення кута повороту в код, кінематично зв'язані входами з формним циліндром і пазовим кулачком, а виходами електрично зв'язані з входами першого суматора, імпульсні задавальні...
Попередній патент: Ротор багатоступінчастого осьового компресора та спосіб його складання
Наступний патент: Спосіб знешкодження димових газів паливоспалювальних агрегатів
Випадковий патент: Спосіб визначення величини дихальної синусової аритмії