Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації
Номер патенту: 62734
Опубліковано: 15.08.2005
Автори: Корсун Валентин Петрович, Мотуз Георгій Іванович, Старков Юрій Володимирович, Кралін Володимир Всеволодович, Демченко Леонтій Іванович

Формула / Реферат
Засіб для лікування і профілактики гострих респіраторних хвороб молодняку сільськогосподарських тварин містить тримекаїн, наповнювач, розчинник. Додатково засіб містить тимол, хладон, як наповнювач - гліцерин, як розчинник- спирт етиловий.
Текст
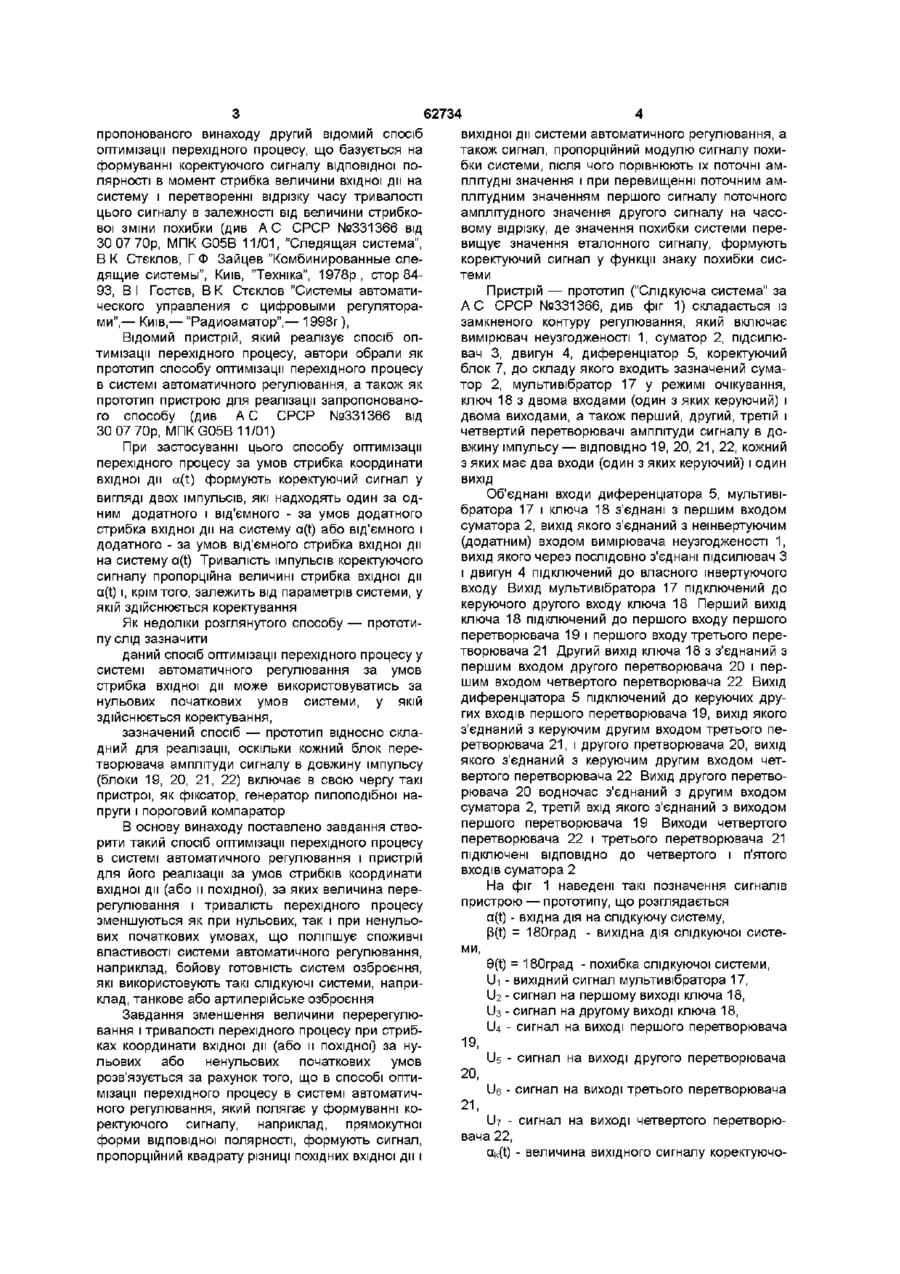
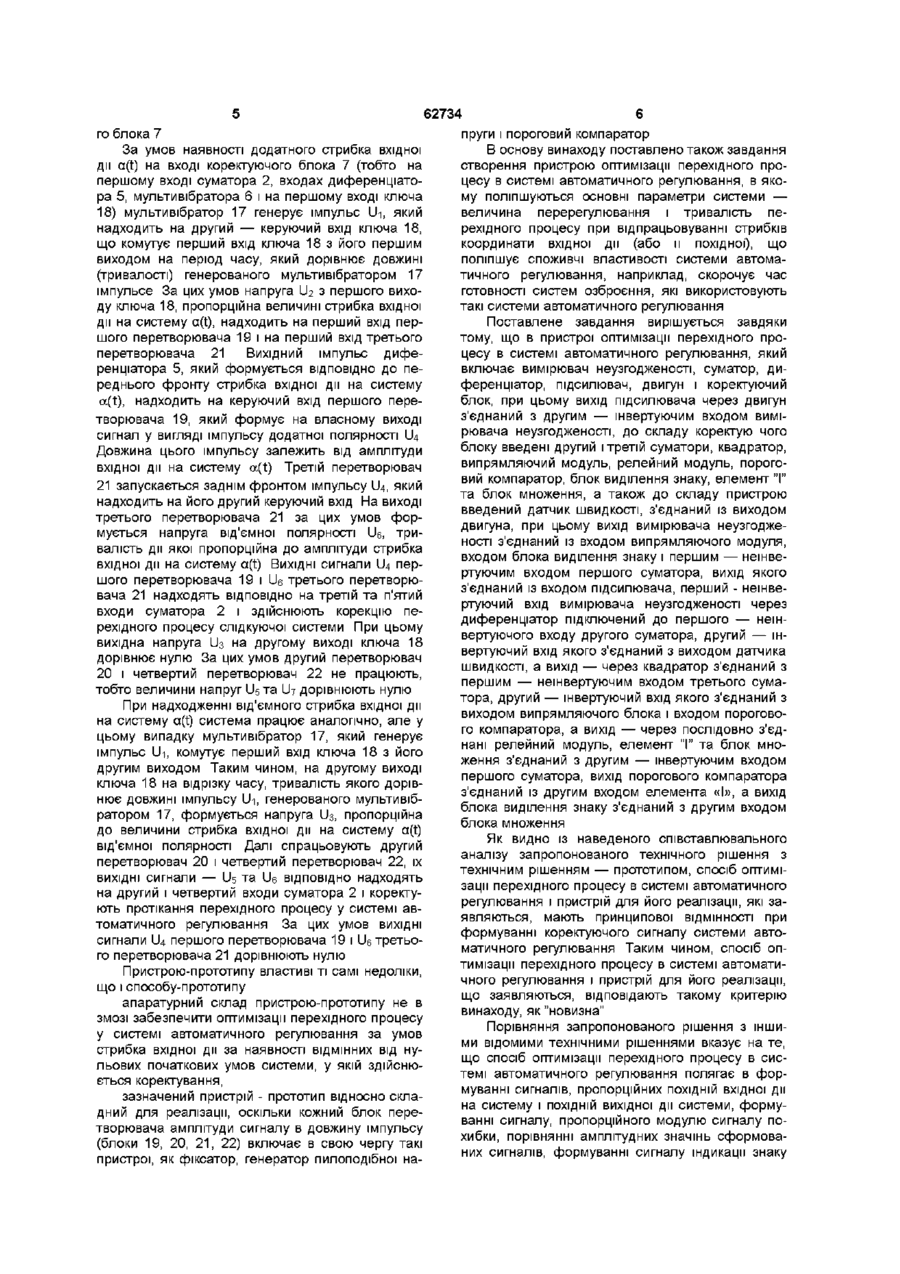
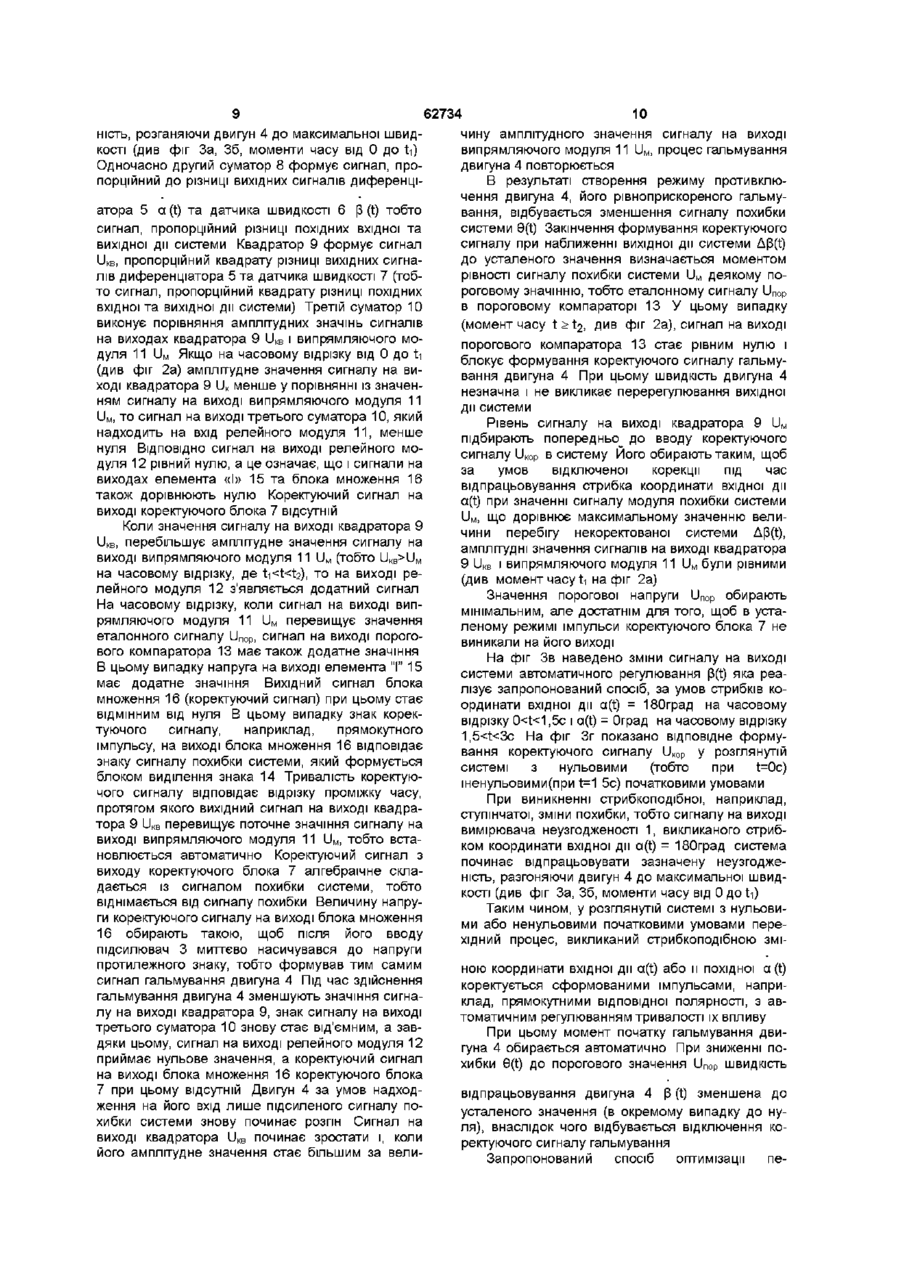
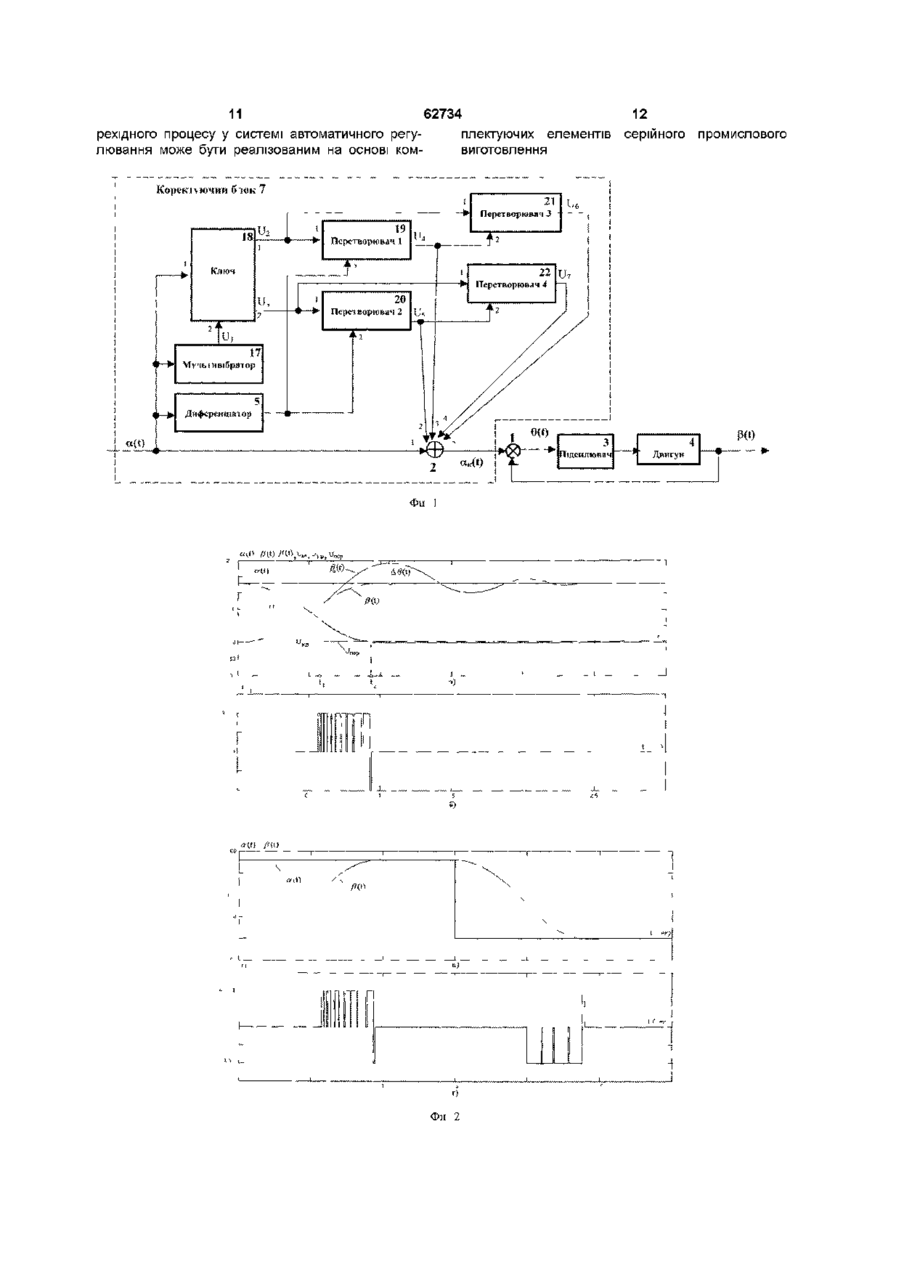
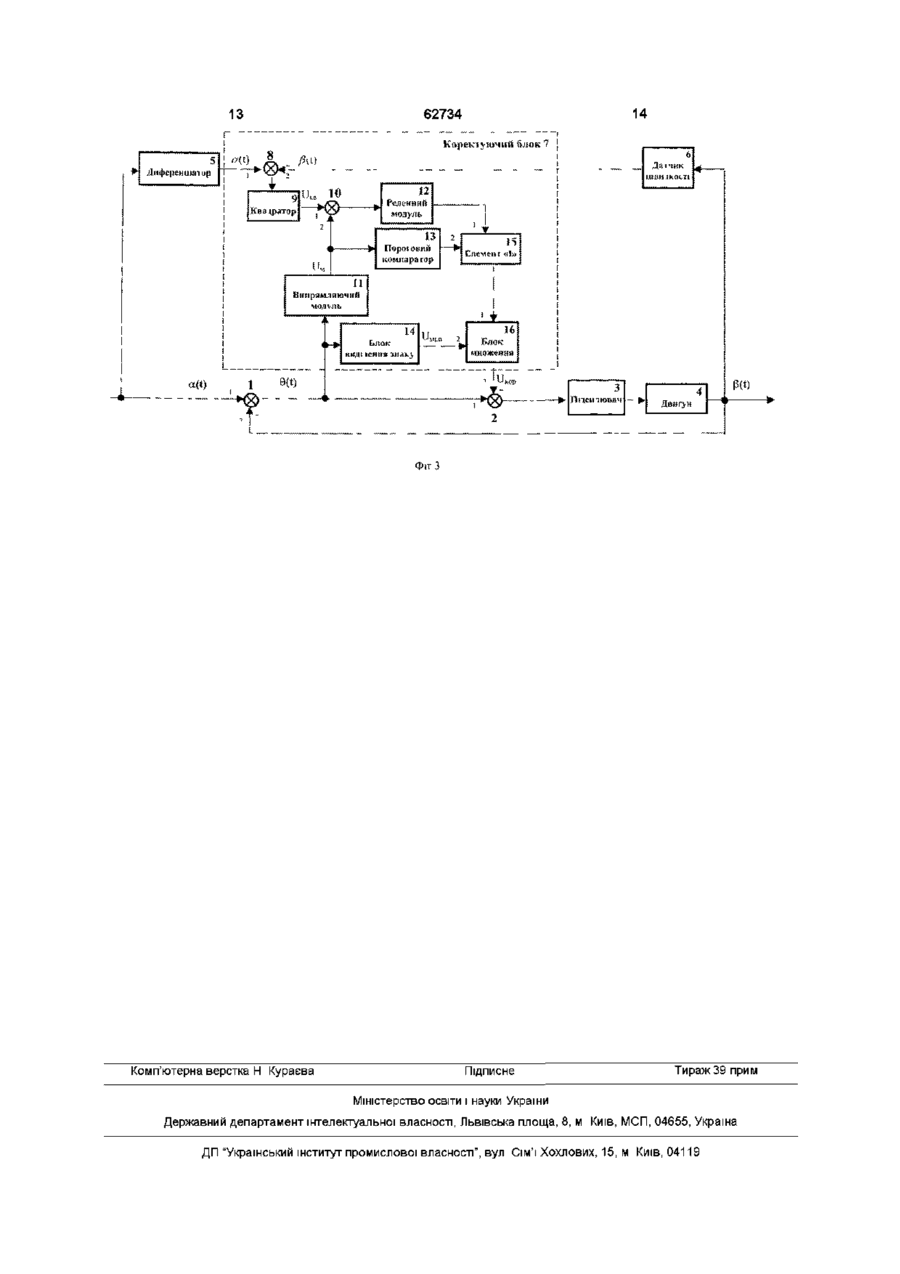
1 Спосіб оптимізацм перехідного процесу в системі автоматичного регулювання, що базується на формуванні коректуючого сигналу, наприклад, прямокутної форми відповідної полярності, за умов скачкоподібної зміни координати вхідної дії, який відрізняється тим, що формують сигнал, пропорційний квадрату різниці похідних вхідної і вихідної дії системи автоматичного регулювання, а також сигнал, пропорційний модулю сигналу похибки системи, після чого порівнюють поточні амплітудні значення цих сигналів і при перевищенні поточним амплітудним значенням першого сигналу поточного амплітудного значення другого сигналу на часовому відрізку, де значення похибки системи перевищує значення еталонного сигналу, формують коректуючий сигнал у функції знаку похибки системи 2 Пристрій оптимізацм перехідного процесу в системі автоматичного регулювання, що включає вимірювач неузгодженості, суматор, диференціатор, підсилювач, двигун і коректуючий блок, при цьому вихід підсилювача через двигун з'єднаний з другим - інвертуючим входом вимірювача неузгодженості, який відрізняється тим, що до складу коректуючого блока введені другий і третій суматори, квадратор, випрямляючий модуль, релейний модуль, пороговий компаратор, блок виділення знаку, елемент "І" та блок множення, а також до складу пристрою введений датчик швидкості, з'єднаний із виходом двигуна, при цьому вихід вимірювача неузгодженості з'єднаний із входом випрямляючого модуля, входом блока виділення знаку і першим -нешвертуючим входом першого суматора, вихід якого з'єднаний із входом підсилювача, перший - нешвертуючий вхід вимірювача неузгодженості через диференціатор підключений до першого - нешвертуючого входу другого суматора, другий - інвертуючий вхід якого з'єднаний з виходом датчика швидкості, а вихід - через квадратор з'єднаний з першим - неінвертуючим входом третього суматора, другий - інвертуючий вхід якого з'єднаний з виходом випрямляючого модуля і входом порогового компаратора, а вихід -через послідовно з'єднані релейний модуль, елемент "І" та блок множення з'єднаний із другим - інвертуючим входом першого суматора, при цьому вихід порогового компаратора з'єднаний з другим входом елемента "І", а вихід блока виділення знаку з'єднаний з другим входом блока множення СО сч (О Запропонований винахід належить до способів і систем автоматичного керування і регулювання, насамперед, до слідкуючих систем, і може використовуватись, в тому числі, при розробці нелінійних коректуючих пристроїв Відомий спосіб оптимізацм перехідного процесу базується на формуванні коректуючого сигналу, пропорційного швидкості системи автоматичного регулювання, складанні (сумуванні) його із сигналом похибки на часовому інтервалі неспівпадання знаків сигналів похибки і и похідної, порівнянні їх ВІДПОВІДНИХ поточних амплітудних значень і формуванні коректуючого сигналу з моменту, коли ці поточні амплітудні значення рівні, до моменту, коли поточне значення сигналу похідної від сигналу похибки дорівнює значенню еталонного сигналу (див А С СРСР №660016 від 30 04 79р. МПК G05B 11/01) До недоліків розглянутого способу — аналогу належать складність його реалізації, пов'язана з використанням сигналу похибки, який найчастіше не звільнено від шумів, неможливість забезпечення повної відсутності перерегул ювання Найбільш близький за технічною суттю до за 62734 пропонованого винаходу другий відомий спосіб оптимізацм перехідного процесу, що базується на формуванні коректуючого сигналу відповідної полярності в момент стрибка величини вхідної дії на систему і перетворенні відрізку часу тривалості цього сигналу в залежності від величини стрибковоі зміни похибки (див А С СРСР №331366 від 30 07 70р. МПК G05B 11/01, "Следящая система", В К Стєклов, ГФ Зайцев "Комбинированные следящие системы", Київ, "Техніка", 1978р, стор 8493, В І Гостєв, В К Стєклов "Системы автоматического управления с цифровыми регуляторами",— Київ,— "Радиоаматор",— 1998г), Відомий пристрій, який реалізує спосіб оптимізацм перехідного процесу, автори обрали як прототип способу оптимізацм перехідного процесу в системі автоматичного регулювання, а також як прототип пристрою для реалізації запропонованого способу (див А С СРСР №331366 від 30 07 70р. МПК G05B 11/01) При застосуванні цього способу оптимізацм перехідного процесу за умов стрибка координати вхідної дії a(t) формують коректуючий сигнал у вигляді двох імпульсів, які надходять один за одним додатного і від'ємного - за умов додатного стрибка вхідної дії на систему a(t) або від'ємногоі додатного - за умов від'ємного стрибка вхідної дії на систему a(t) Тривалість імпульсів коректуючого сигналу пропорційна величині стрибка вхідної дії a(t) і, крім того, залежить від параметрів системи, у якій здійснюється коректування Як недоліки розглянутого способу — прототипу слід зазначити даний спосіб оптимізацм перехідного процесу у системі автоматичного регулювання за умов стрибка вхідної дії може використовуватись за нульових початкових умов системи, у якій здійснюється коректування, зазначений спосіб — прототип відносно складний для реалізації, оскільки кожний блок перетворювача амплітуди сигналу в довжину імпульсу (блоки 19, 20, 21, 22) включає в свою чергу такі пристрої, як фіксатор, генератор пилоподібної напруги і пороговий компаратор В основу винаходу поставлено завдання створити такий спосіб оптимізацм перехідного процесу в системі автоматичного регулювання і пристрій для його реалізації за умов стрибків координати вхідної дії (або и похідної), за яких величина перерегулювання і тривалість перехідного процесу зменшуються як при нульових, так і при ненульових початкових умовах, що поліпшує споживчі властивості системи автоматичного регулювання, наприклад, бойову готовність систем озброєння, які використовують такі слідкуючі системи, наприклад, танкове або артилерійське озброєння Завдання зменшення величини перерегулювання і тривалості перехідного процесу при стрибках координати вхідної дії (або и похідної) за нульових або ненульових початкових умов розв'язується за рахунок того, що в способі оптимізацм перехідного процесу в системі автоматичного регулювання, який полягає у формуванні коректуючого сигналу, наприклад, прямокутної форми відповідної полярності, формують сигнал, пропорційний квадрату різниці похідних вхідної дії і вихідної дії системи автоматичного регулювання, а також сигнал, пропорційний модулю сигналу похибки системи, після чого порівнюють їх поточні амплітудні значення і при перевищенні поточним амплітудним значенням першого сигналу поточного амплітудного значення другого сигналу на часовому відрізку, де значення похибки системи перевищує значення еталонного сигналу, формують коректуючий сигнал у функції знаку похибки системи Пристрій — прототип ("Слідкуюча система" за А С СРСР №331366, див фіг 1) складається із замкненого контуру регулювання, який включає вимірювач неузгодженості 1, суматор 2, підсилювач 3, двигун 4, диференціатор 5, коректуючий блок 7, до складу якого входить зазначений суматор 2, мультивібратор 17 у режимі очікування, ключ 18 з двома входами (один з яких керуючий) і двома виходами, а також перший, другий, третій і четвертий перетворювачі амплітуди сигналу в довжину імпульсу— ВІДПОВІДНО 19, 20, 21, 22, кожний з яких має два входи (один з яких керуючий) і один вихід Об'єднані входи диференціатора 5, мультивібратора 17 і ключа 18 з'єднані з першим входом суматора 2, вихід якого з'єднаний з нешвертуючим (додатним) входом вимірювача неузгодженості 1, вихід якого через послідовно з'єднані підсилювач З і двигун 4 підключений до власного інвертуючого входу Вихід мультивібратора 17 підключений до керуючого другого входу ключа 18 Перший вихід ключа 18 підключений до першого входу першого перетворювача 19 і першого входу третього перетворювача 21 Другий вихід ключа 18 з з'єднаний з першим входом другого перетворювача 20 і першим входом четвертого перетворювача 22 Вихід диференціатора 5 підключений до керуючих других входів першого перетворювача 19, вихід якого з'єднаний з керуючим другим входом третього перетворювача 21, і другого претворювача 20, вихід якого з'єднаний з керуючим другим входом четвертого перетворювача 22 Вихід другого перетворювача 20 водночас з'єднаний з другим входом суматора 2, третій вхід якого з'єднаний з виходом першого перетворювача 19 Виходи четвертого перетворювача 22 і третього перетворювача 21 підключені ВІДПОВІДНО до четвертого і п'ятого входів суматора 2 На фіг 1 наведені такі позначення сигналів пристрою — прототипу, що розглядається a(t) - вхідна дія на слідкуючу систему, (3(t) = 180град - вихідна дія слідкуючої системи, 9(t) = 180град - похибка слідкуючої системи, Ui - вихідний сигнал мультивібратора 17, 112 - сигнал на першому виході ключа 18, 113 - сигнал на другому виході ключа 18, ІЦ - сигнал на виході першого перетворювача 19, Us - сигнал на виході другого перетворювача 20, 1 6 - сигнал на виході третього перетворювача 1 21, 117 - сигнал на виході четвертого перетворювача 22, dk(t) - величина вихідного сигналу коректуючо 62734 го блока 7 пруги і пороговии компаратор За умов наявності додатного стрибка вхідної В основу винаходу поставлено також завдання дм a(t) на вході коректуючого блока 7 (тобто на створення пристрою оптимізацм перехідного пропершому вході суматора 2, входах диференціатоцесу в системі автоматичного регулювання, в якора 5, мультивібратора 6 і на першому вході ключа му поліпшуються основні параметри системи — 18) мультивібратор 17 генерує імпульс U-i, який величина перерегул ювання і тривалість пенадходить на другий — керуючий вхід ключа 18, рехідного процесу при відпрацьовуванні стрибків що комутує перший вхід ключа 18 з його першим координати вхідної дії (або и похідної}, що виходом на період часу, який дорівнює довжині поліпшує споживчі властивості системи автома(тривалості) генерованого мультивібратором 17 тичного регулювання, наприклад, скорочує час імпульсе За цих умов напруга ІІ2 з першого вихоготовності систем озброєння, які використовують ду ключа 18, пропорційна величині стрибка вхідної такі системи автоматичного регулювання дії на систему a(t), надходить на перший вхід перПоставлене завдання вирішується завдяки шого перетворювача 19 і на перший вхід третього тому, що в пристрої оптимізацм перехідного проперетворювача 21 Вихідний імпульс дифецесу в системі автоматичного регулювання, який ренціатора 5, який формується ВІДПОВІДНО до певключає вимірювач неузгодженості, суматор, диреднього фронту стрибка вхідної дії на систему ференціатор, підсилювач, двигун і коректуючий a(t), надходить на керуючий вхід першого переблок, при цьому вихід підсилювача через двигун творювача 19, який формує на власному виході з'єднаний з другим — інвертуючим входом вимісигнал у вигляді імпульсу додатної полярності ІЦ рювача неузгодженості, до складу коректую чого Довжина цього імпульсу залежить від амплітуди блоку введені другий і третій суматори, квадратор, вхідної дії на систему a(t) Третій перетворювач випрямляючий модуль, релейний модуль, порого21 запускається заднім фронтом імпульсу ІЦ, який вий компаратор, блок виділення знаку, елемент "І" надходить на його другий керуючий вхід На виході та блок множення, а також до складу пристрою третього перетворювача 21 за цих умов форвведений датчик швидкості, з'єднаний із виходом мується напруга від'ємної полярності ІІє, тридвигуна, при цьому вихід вимірювача неузгоджевалість дії якої пропорційна до амплітуди стрибка ності з'єднаний із входом випрямляючого модуля, вхідної дії на систему a(t) ВИХІДНІ сигнали ІЦ первходом блока виділення знаку і першим — неінвешого перетворювача 19 і ІІє третього перетворюртуючим входом першого суматора, вихід якого вача 21 надходять ВІДПОВІДНО на третій та п'ятий з'єднаний із входом підсилювача, перший - неінвевходи суматора 2 і здійснюють корекцію пертуючий вхід вимірювача неузгодженості через рехідного процесу слідкуючої системи При цьому диференціатор підключений до першого — неінвихідна напруга ІІз на другому виході ключа 18 вертуючого входу другого суматора, другий — індорівнює нулю За цих умов другий перетворювач вертуючий вхід якого з'єднаний з виходом датчика 20 і четвертий перетворювач 22 не працюють, швидкості, а вихід — через квадратор з'єднаний з тобто величини напруг Us та ІІ7 дорівнюють нулю першим — нешвертуючим входом третього суматора, другий — інвертуючий вхід якого з'єднаний з виходом випрямляючого блока і входом пороговоПри надходженні від'ємного стрибка вхідної дії го компаратора, а вихід — через послідовно з'єдна систему a(t) система працює аналогічно, але у нані релейний модуль, елемент "І" та блок мноцьому випадку мультивібратор 17, який генерує ження з'єднаний з другим — інвертуючим входом імпульс U-i, комутує перший вхід ключа 18 з його першого суматора, вихід порогового компаратора другим виходом Таким чином, на другому виході з'єднаний із другим входом елемента «І», а вихід ключа 18 на відрізку часу, тривалість якого дорівблока виділення знаку з'єднаний з другим входом нює довжині імпульсу U-i, генерованого мультивібблока множення ратором 17, формується напруга ІІз, пропорційна до величини стрибка вхідної дії на систему a(t) Як видно із наведеного співставлювального від'ємної полярності Далі спрацьовують другий аналізу запропонованого технічного рішення з перетворювач 20 і четвертий перетворювач 22, їх технічним рішенням — прототипом, спосіб оптиміВИХІДНІ сигнали — Us та U6 ВІДПОВІДНО надходять зацм перехідного процесу в системі автоматичного на другий і четвертий входи суматора 2 і коректурегулювання і пристрій для його реалізації, які зають протікання перехідного процесу у системі авявляються, мають принципової ВІДМІННОСТІ при томатичного регулювання За цих умов ВИХІДНІ формуванні коректуючого сигналу системи автосигнали U4 першого перетворювача 19 і U6 третьоматичного регулювання Таким чином, спосіб опго перетворювача 21 дорівнюють нулю тимізацм перехідного процесу в системі автоматиПристрою-прототипу властиві ті самі недоліки, чного регулювання і пристрій для його реалізації, що і способу-прототипу що заявляються, відповідають такому критерію апаратурний склад пристрою-прототипу не в винаходу, як "новизна" змозі забезпечити оптимізаци перехідного процесу Порівняння запропонованого рішення з іншиу системі автоматичного регулювання за умов ми відомими технічними рішеннями вказує на те, стрибка вхідної дії за наявності ВІДМІННИХ ВІД нущо спосіб оптимізацм перехідного процесу в сисльових початкових умов системи, у якій здійснютемі автоматичного регулювання полягає в форється коректування, муванні сигналів, пропорційних ПОХІДНІЙ ВХІДНОЇ ДІЇ зазначений пристрій - прототип відносно склана систему і ПОХІДНІЙ вихідної дії системи, формудний для реалізації, оскільки кожний блок переванні сигналу, пропорційного модулю сигналу потворювача амплітуди сигналу в довжину імпульсу хибки, порівнянні амплітудних значінь сформова(блоки 19, 20, 21, 22) включає в свою чергу такі них сигналів, формуванні сигналу індикації знаку пристрої, як фіксатор, генератор пилоподібної на 62734 похибки регулирования системи, а також у формуванні коректуючого сигналу, який має відповідну полярність та тривалість, і при відповідному взаємозв'язку з формуванням інших сигналів системи автоматичного регулювання дозволяє поліпшити основні параметри системи — величину перерегулювання і тривалість перехідного процесу при відпрацьовуванні стрибків координати вхідної дії на систему або її похідної за умов нульових або ненульових початкових умов коректованої системи автоматичного регулювання Суть винаходу пояснюється кресленнями, де на фіг 1 — наведено блок-схему пристрою — прототипу, на фіг 2 (а-г) — наведено часові діаграми, що ілюструють запропонований спосіб оптимізацм перехідного процесу в системі автоматичного регулювання, на фіг 3 - зображено блок-схему пристрою, який реалізує запропонований спосіб На часових діаграмах (див фіг 2), а також у наведеній блок-схемі пристрою, який реалізує роботу запропонованого способу (див фіг 3), позначено a(t) - вхідна дія на систему автоматичного регулювання, a (t) - сигнал похідної від вхідної дії на зазначену систему, po(t) - вихідна (відпрацьована) дія некоректованої системи, up(t) - максимальне перерегулювання вихідної дії po(t) некоректованої системи, p(t) - вихідна (відпрацьована) дія коректованої системи, р (t) - сигнал похідної вихідної (відпрацьованої) дії системи, 9(t) - сигнал похибки системи, U H - сигнал, який формується на виході випрямляючого модуля 11 (див фіг 3) похибки, и к в - сигнал, який формується на виході квадратора 9 (див фіг 3), Unop - еталонний сигнал (заданий пороговий сигнал) порогового компаратора 13 (див фіг 3), USign - сигнал на виході блока виділення знаку 14 (див фіг 3), UKOp - коректуючий сигнал системи (сигнал на виході блока множення 16, див фіг 3) Спосіб оптимізацм перехідного процесу в системі автоматичного регулювання полягає в наступному (див фіг 2, 3) При відпрацьовуванні керуючих сигналів повільної зміни a(t) за умов усталеного режиму, величина похибки системи 9(t) близька до нуля і не перевищує заданого порогового значення UnOp Коректуючий сигнал на виході коректуючого пристрою UKOp відсутній Таким чином, система автоматичного регулювання працює як лінійна система з малою похибкою керування При виникненні стрибкоподібних змін координати вхідної дії a(t) або и похідної a (t) формують сигнал, пропорційний квадрату різниці похідних вхідної дії системи автоматичного регулювання 8 a (t) та и вихідної дм р (t) Одночасно формують сигнал, пропорційний модулю сигналу похибки системи автоматичного регулювання U H Після цього порівнюють поточні амплітудні значення вказаних сформованих сигналів За умов перевищення поточним амплітудним значенням сигналу UKB, пропорційним квадрату різниці похідних вхідної та вихідної дії, амплітудного значення сигналу UH, пропорційного модулю похибки системи автоматичного регулювання, на часовому відрізку, де значення сигналу U H перевищує значення еталонного сигналу UnOp, формують коректуючий сигнал відповідної полярності UKOp в функції знаку сигналу похибки системи автоматичного регулювання Функціональну схему пристрою — системи автоматичного регулювання, яка реалізує запропонований спосіб, наведено на фіг З Система включає вимірювач неузгодженості 1, перший суматор 2, підсилювач 3, двигун 4, диференціатор 5, датчик швидкості (диференціатор вихідної дії системи) 6 та коректуючий блок 7, до складу якого входять другий суматор 8, квадратор 9, третій суматор 10, випрямляючий модуль 11, релейний модуль 12, пороговий компаратор 13, блок виділення знаку 14, елемент "І" 15 та блок множення 16 Вхід диференціатора 5 з'єднаний з першим — нешвертуючим входом вимірювача неузгодженості 1, вихід якого через послідовно з'єднані перший суматор 2 і підсилювач 3 з'єднаний із входом двигуна 4, вихід якого з'єднаний з другим — інвертуючим входом вимірювача неузгодженості 1 та входом датчика швидкості 6 Вихід диференціатора 5 з'єднаний з першим — нешвертуючим входом другого суматора 8, другий — інвертуючий вхід якого з'єднаний з виходом датчика швидкості 6, а вихід — через послідовно з'єднані квадратор 9, третій суматор 10, релейний модуль 12, елемент "І" 15 і блок множення 16 з'єднаний з інвертуючим — другим входом першого суматора 2 Водночас вихід вимірювача неузгодженості 1 з'єднаний з об'єднаними входами випрямляючого модуля 11 та блока виділення знаку 14, вихід якого з'єднаний із другим входом блока множення 16 Вихід випрямляючого модуля 11 з'єднаний з другим — інвертуючим входом третього суматора 10 і через пороговий компаратор 13 з'єднаний з другим входом елемента "І" 15 При відпрацьовуванні керуючих сигналів a(t) повільної зміни за умов усталеного режиму, величина похибки системи 9(t) близька до нуля і не перевищує заданого порогового значення UnOp в пороговому компараторі 13 Внаслідок цього, сигнал на виході порогового компаратора 13 дорівнює нулю, а коректуючий сигнал на виході коректуючого пристрою (вихід блока множення 16) відсутній Система автоматичного регулювання працює як лінійна система з малою похибкою керування При виникненні стрибкоподібної, наприклад, ступінчатої, зміни похибки, тобто сигналу на виході вимірювача неузгодженості 1, викликаного стрибком координати вхідної дії a(t) = 180град система починає відпрацьовувати зазначену неузгодже 62734 ність, розганяючи двигун 4 до максимальної швидкості (див фіг За, 36, моменти часу від 0 до t-i) Одночасно другий суматор 8 формує сигнал, пропорційний до різниці вихідних сигналів диференціатора 5 a (t) та датчика швидкості 6 [3 (t) тобто сигнал, пропорційний різниці похідних вхідної та вихідної дії системи Квадратор 9 формує сигнал и к в , пропорційний квадрату різниці вихідних сигналів диференціатора 5 та датчика швидкості 7 (тобто сигнал, пропорційний квадрату різниці похідних вхідної та вихідної дії системи) Третій суматор 10 виконує порівняння амплітудних значінь сигналів на виходах квадратора 9 UKB і випрямляючого модуля 11 U M Якщо на часовому відрізку від 0 до ti (див фіг 2а) амплітудне значення сигналу на виході квадратора 9 UK менше у порівнянні із значенням сигналу на виході випрямляючого модуля 11 U H , то сигнал на виході третього суматора 10, який надходить на вхід релейного модуля 1 1 , менше нуля ВІДПОВІДНО сигнал на виході релейного модуля 12 рівний нулю, а це означає, що і сигнали на виходах елемента «І» 15 та блока множення 16 також дорівнюють нулю Коректуючий сигнал на виході коректуючого блока 7 відсутній Коли значення сигналу на виході квадратора 9 и к в , перебільшує амплітудне значення сигналу на виході випрямляючого модуля 11 U M (тобто и К в > и н на часовому відрізку, де t-i
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for optimizing transients in an automatic control system and a device for the realization of the method
Автори англійськоюDemchenko Leontii Ivanovych, Korsun Valentyn Petrovych, Kralin Volodymyr Vsevolodovych, Motuz Heorhii Ivanovych
Назва патенту російськоюСпособ оптимизации переходных процессов в системе автоматического регулирования и устройство для осуществления способа
Автори російськоюДемченко Леонтий Иванович, Корсун Валентин Петрович, Кралин Владимир Всеволодович, Мотуз Георгий Иванович
МПК / Мітки
МПК: G05B 11/01, G05B 11/00
Мітки: перехідного, системі, спосіб, автоматичного, процесу, пристрій, оптимізації, регулювання, реалізації
Код посилання
<a href="https://ua.patents.su/7-62734-sposib-optimizaci-perekhidnogo-procesu-u-sistemi-avtomatichnogo-regulyuvannya-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб оптимізації перехідного процесу у системі автоматичного регулювання та пристрій для його реалізації</a>
Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів чи виробів (парс-тп) та спосіб такого регулювання
Номер патенту: 34060
Опубліковано: 15.04.2003
Автори: Костогриз Кирило Петрович, Русінковський Олег Юрійович, Костогриз Петро Васильович
МПК: F26B 3/02, F26B 25/22, F26B 21/06
Мітки: прогартовування, пристрій, виробів, автоматичного, парс-тп, регулювання, сушіння, матеріалів, процесу, такого, спосіб
Формула / Реферат:
1. Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів або виробів у сушильному агрегаті, що містить вимірювальні пристрої, кожен з яких виконаний у вигляді, принаймні одного датчика, з’єднаного з елементом порівняння, блок керування, із входами якого з’єднані вимірювальні пристрої, а вихід якого зв'язаний з виконавчим механізмом регулювального органа подачі палива у камеру спалювання, при цьому датчик першого...
Спосіб автоматичного регулювання електричного режиму дугової сталеплавильної печі та пристрій для його реалізації
Номер патенту: 61549
Опубліковано: 17.11.2003
Автор: Циганаш Віктор Євграфович
МПК: G05F 1/00
Мітки: режиму, електричного, автоматичного, дугової, пристрій, регулювання, реалізації, печі, спосіб, сталеплавильної
Формула / Реферат:
1. Спосіб автоматичного регулювання електричного режиму дугової сталеплавильної печі, згідно з яким вимірюють струми та напруги дуг печі, перетворюють їх у сигнали, пропорційні вимірюваним параметрам, і подають сигнали на модель силового контуру печі, після чого вимірюють на моделі сигнали, порівнюють їх із заданими та при наявності неузгодженостей змінюють довжини дуг до усунення неузгодженостей, який відрізняється тим, що сигнали,...
Пристрій для автоматичного регулювання процесу розкочування фарби в друкарських машинах
Номер патенту: 54192
Опубліковано: 17.02.2003
Автори: Бабінець Василь Михайлович, Верхола Михайло Іванович, Никифорук Богдан Васильович, Гук Ігор Богданович
МПК: B41F 31/00
Мітки: розкочування, фарби, друкарських, автоматичного, машинах, регулювання, процесу, пристрій
Формула / Реферат:
Пристрій для автоматичного регулювання процесу розкочування фарби в друкарських машинах, що містить розтиральний циліндр, пазовий кулачок, механічно зв'язаний з валом електродвигуна, вхід якого з'єднаний з блоком керування швидкістю обертання, задавальні елементи перетворення кута повороту в код, кінематично зв'язані входами з формним циліндром і пазовим кулачком, а виходами електрично зв'язані з входами першого суматора, імпульсні задавальні...
Спосіб оптимізації передавання програми багатьом користувачам,cистема для його реалізації та використовувані в системі приймач для приймання програми та пристрій планування .
Номер патенту: 41301
Опубліковано: 17.09.2001
Автор: Де Бей Генрі Куртіс
Мітки: використовувані, приймач, спосіб, системі, користувачам,cистема, програми, оптимізації, передавання, багатьом, приймання, планування, пристрій, реалізації
Формула / Реферат:
1. Способ оптимизации передачи программы многим пользователям, заключающийся в том, что передают программы через систему распределения, отличающийся тем, что в головной части системы распределения формируют программу, разделенную на множество программных сегментов для реализации алгоритма планирования, располагающего программные сегменты в заданной последовательности, и передают программные сегменты согласно алгоритму планирования с...
Пристрій для контролю обмерзання і автоматичного регулювання процесу відтавання

Номер патенту: 64119
Опубліковано: 16.02.2004
Автори: Федорейко Валерій Степанович, Андрієвський Володимир Вікторович, Чотарі Аттіла Золтанович, Полищук Володимир Анатолійович
МПК: F25D 21/00, G01K 11/00
Мітки: контролю, пристрій, обмерзання, автоматичного, процесу, регулювання, відтавання
Формула / Реферат:
Пристрій для контролю обмерзання і автоматичного регулювання процесу відтавання, що містить ємність з плавкою речовиною, яка є діелектриком в твердому стані та електролітом в рідкому стані, в яку введенні електроконтакти, який відрізняється тим, що пристрій виконаний у вигляді кільцевого електрода, що охоплює трубу теплообмінника та ізольований від неї шаром діелектрика з малим тепловим опором.
Попередній патент: Газовий радіаційний пальник
Наступний патент: Спосіб профілактики запальних захворювань тканин пародонту у дітей, що проживають в регіоні з низьким вмістом фтору у питній воді
Випадковий патент: Спосіб відновлення і зміцнення циліндричних деталей