Спосіб настроювання вагових коефіцієнтів системи “adaline” при керуванні динамічними об’єктами
Номер патенту: 81997
Опубліковано: 25.02.2008
Автори: Богучарський В''ячеслав Вікторович, Чіпіжко Юрій Анатолійович, Рудаков Володимир Іванович, Гупало Андрій Юрійович, Турчин Валентин Миколайович, Кучеров Дмитро Павлович
Формула / Реферат
Спосіб настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічними об'єктами, за яким в системі керування встановлюють вхідні дані, які включають потрібну похибку відпрацювання завдання динамічним об'єктом, початковий вектор настроюваних параметрів та початковий стан динамічного об'єкта, що відповідає еталонній вирішальній функції системи "Adaline", вимірюють координати динамічного об'єкта, за координатами динамічного об'єкта та вектора настроюваних параметрів обчислюють значення вирішальної функції системи "Adaline", порівнюють значення отриманої вирішальної функції зі значенням еталонної для певного моменту часу керування, на заключній стадії настроювання в разі невідповідності значень вирішальної та еталонної функцій змінюють початковий вектор настроюваних параметрів в бік зменшення похибки відпрацювання з подальшим приведенням її до мінімального значення, який відрізняється тим, що при встановленні вхідних даних в системі керування додатково встановлюють необхідне число перемикань керуючого сигналу, при вимірюванні координат системи додатково контролюють число перемикань сигналу керування та запам'ятовують координати динамічного об'єкта в момент першого перемикання, а на заключній стадії змінюють вектор настроюваних параметрів з використанням додаткових даних числа перемикань сигналу керування на вході динамічного об'єкта та координат точки першого перемикання.
Текст
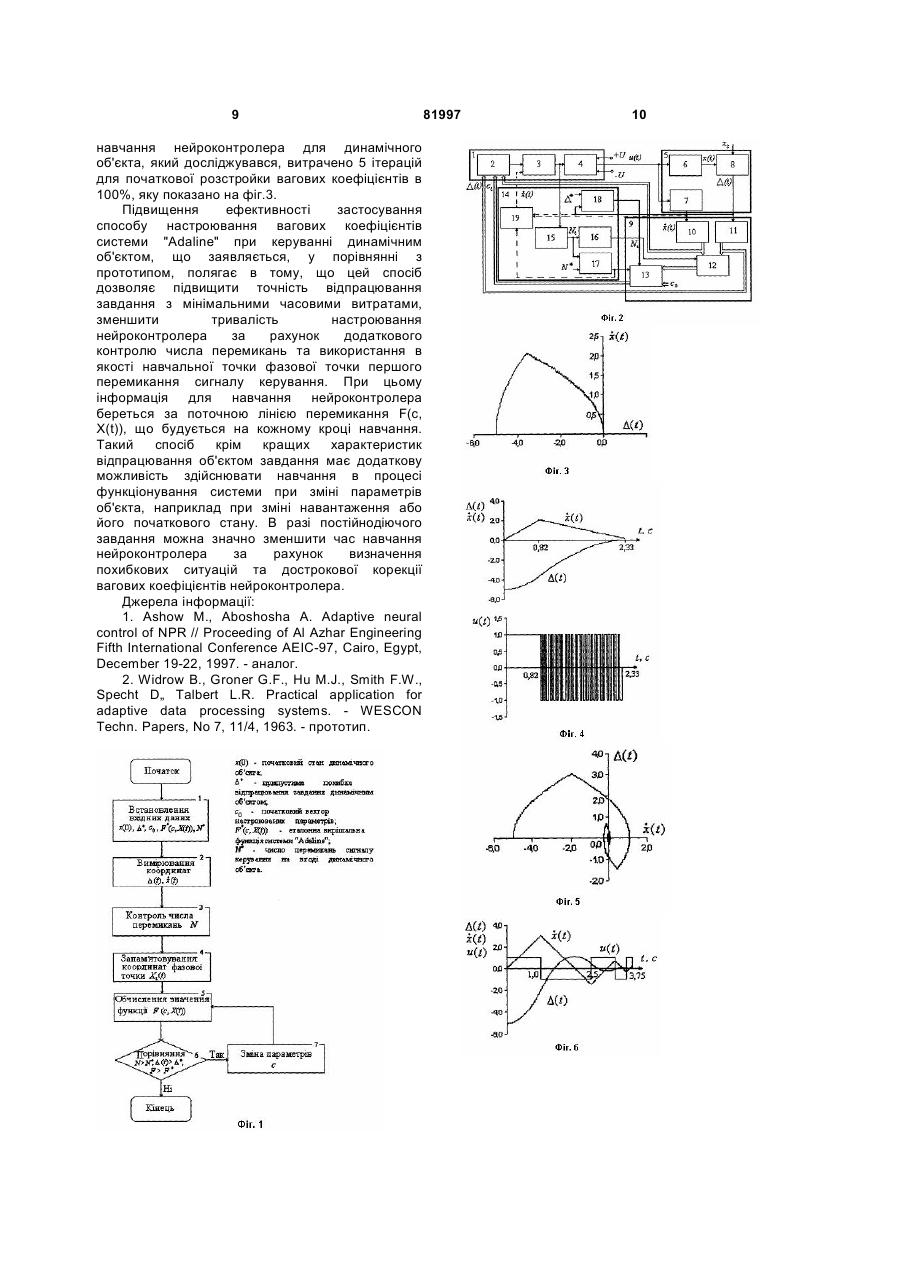
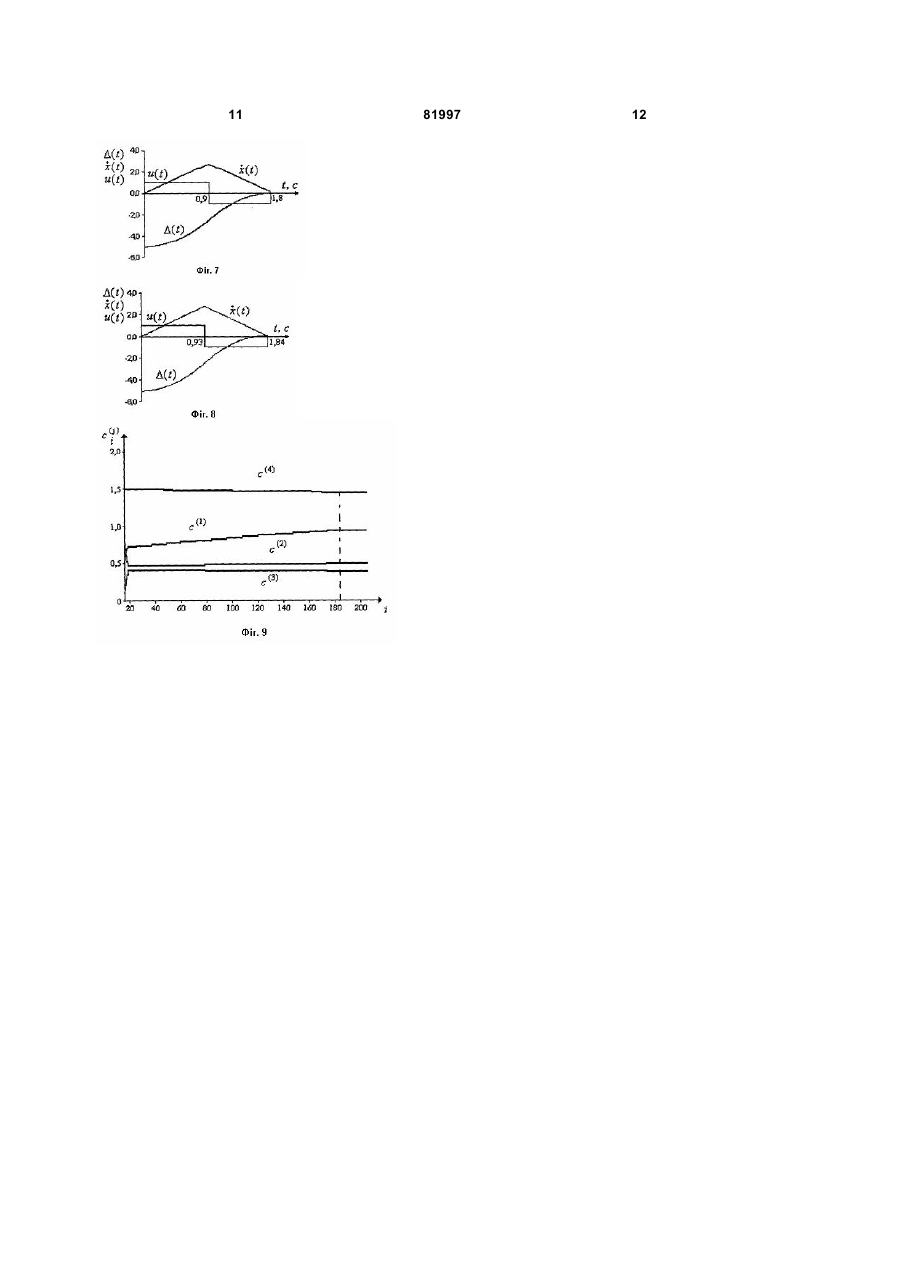
Спосіб настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічними об'єктами, за яким в системі керування встановлюють вхідні дані, які включають потрібну похибку відпрацювання завдання динамічним об'єктом, початковий вектор настроюваних C2 2 81997 1 3 випадком. Різка зміна параметрів та збурень розстроюють систему керування, яка добре працює при середніх розрахункових умовах, при цьому ціль керування може не досягнутися. Саме в таких випадках доцільне застосування адаптивних підходів. Відомі способи реалізації адаптивних систем базуються на методах побудови самонастроюваних систем - це способи побудови екстремальних та нейромережевих систем. Доцільність використання того чи іншого способу визначається властивостями об'єкта та умовами його функціонування. За наявності екстремальної залежності параметрів об'єкта від сигналу керування та умов безперервної зміни характеристик обладнання існує можливість застосування екстремальних способів керування. В тих же системах, де екстремальність характеристик не виявлена, доцільно використовувати методи, що базуються на регулюванні за нейромережевими принципами. Основою нейромережевих регуляторів є система Adaline (Adaptive linear neurone), яка складається з підсилювачів зі змінними коефіцієнтами передачі (ваговими коефіцієнтами, настроюваними параметрами), що настроюються при функціонуванні, та суматора сигналів. Відомий спосіб настроювання системи "Adaline" реалізовано в системі керування ядерним реактором, що складається безпосередньо з системи "Adaline" та ПІДрегулятора. Для настройки нейроконтролера (виконаного за принципами побудови системи "Adaline") в якості еталонної моделі використовується ПІД-регулятор. Для настройки вагових коефіцієнтів системи "Adaline" використовуються вихідні дані ПІД-регулятора, які змінюють вагові коефіцієнти так, що реакція нейроконтролера стає такою самою, як вихід ПІДрегулятора. Після проведення настройки ПІДрегулятор вимикається (1). До недоліків способу відносяться низька швидкість настроювання вагових коефіцієнтів та недостатня точність і швидкодія самої системи керування з ПІД-регулятором, який використовується як еталонна модель для настроювання нейроконтролера. Швидкість настроювання характеризується числом ітерацій, які витрачаються на навчання нейроконтролера (підстроювання вагових коефіцієнтів системи "Adaline"). Точність та швидкодія системи керування в значній мірі визначаються параметрами ПІД-регулятора. Найбільш близьким технічним рішенням, обраним за прототип, є спосіб настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічними об'єктами, за яким в системі керування встановлюють вхідні дані, які включають потрібну похибку відпрацювання завдання динамічним об'єктом, початковий вектор настроюваних параметрів та початковий стан динамічного об'єкта, що відповідає еталонній вирішальній функції системи "Adaline", вимірюють координати динамічного об'єкта, за координатами динамічного об'єкта та вектора настроюваних 81997 4 параметрів обчислюють значення вирішальної функції системи "Adaline", порівнюють значення отриманої вирішальної функції зі значенням еталонної для певного моменту часу керування, на заключній стадії настроювання в разі невідповідності значень вирішальної та еталонної функцій змінюють початковий вектор настроюваних параметрів в бік зменшення похибки відпрацювання з подальшим приведенням її до мінімального значення (2). Недоліком способу настроювання вагових коефіцієнтів системи "Adaline", який обраний за прототип, є тривалість настроювання та точність відпрацювання завдання динамічним об'єктом після проведення настроювання. Спосіб настроювання суттєво спирається на відмінності, що є в вирішальній функції еталонної моделі та системі "Adaline". Наявність відмінностей з одного боку визначає величину та напрям зміни вагових коефіцієнтів, а з іншого примушує здійснювати корекцію малим кроком, що впливає на тривалість процесу їх підстроювання. При цьому поведінка динамічної системи підстроюється до навчаючої моделі, яка не враховує динамічні властивості об'єкту керування. Таким чином, якщо параметри еталонної моделі відрізняються від параметрів керованого об'єкта, то бажаної точності та швидкодії отримано не буде, при цьому буде завжди получатися якийсь режим, близький до роботи моделі. Цей недолік є важливим, тому що реальний об'єкт завжди відрізняється від моделі. В основу способу настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічними об'єктами за винаходом покладено завдання шляхом усунення недоліків прототипу забезпечити підвищення точності відпрацювання завдання динамічним об'єктом за мінімально можливий час в системі керування з "Adaline" за рахунок контролю числа перемикань сигналу керування та вибору в якості інформаційної точки для корекції невідомих вагових коефіцієнтів системи "Adaline" - фазової точки, за якою було здійснено перше перемикання сигналу керування. Суть способу настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічними об'єктами, за яким в системі керування встановлюють вхідні дані, які включають потрібну похибку відпрацювання завдання динамічним об'єктом, початковий вектор настроюваних параметрів та початковий стан динамічного об'єкта, що відповідає еталонній вирішальній функції системи "Adaline", вимірюють координати динамічного об'єкта, за координатами динамічного об'єкта та вектора настроюваних параметрів обчислюють значення вирішальної функції системи "Adaline", порівнюють значення отриманої вирішальної функції зі значенням еталонної для певного моменту часу керування, на заключній стадії настроювання в разі невідповідності значень вирішальної та еталонної функцій змінюють початковий вектор настроюваних параметрів в бік зменшення похибки відпрацювання з подальшим приведенням її до мінімального значення полягає в тому, що при встановленні вхідних даних в 5 системі керування додатково встановлюють необхідне число перемикань керуючого сигналу, при вимірюванні координат системи додатково контролюють число перемикань сигналу керування та запам'ятовують координати динамічного об'єкта в момент першого перемикання, а на заключній стадії змінюють вектор настроюваних параметрів з використанням додаткових даних числа перемикань сигналу керування на вході динамічного об'єкта та фазових координат точки першого перемикання сигналу керування. Порівняльний аналіз способу, який заявляється, із прототипом дозволяє зробити висновок, що спосіб настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічним об'єктом, відрізняється тим, що при встановленні вхідних даних в системі керування додатково встановлюють необхідне число перемикань керуючого сигналу, при вимірюванні координат системи додатково контролюють число перемикань сигналу керування та запам'ятовують координати динамічного об'єкта в момент першого перемикання сигналу керування, а на заключній стадії змінюють вектор настроюваних параметрів з використанням додаткових даних числа перемикань сигналу керування на вході динамічного об'єкта та фазових координат точки першого перемикання. Суть способу пояснюється за допомогою ілюстрацій, де на фіг.1 показано послідовність дій виконання способу, що заявляється, на фіг.2 приведено структурну схему пристрою, що реалізує спосіб, який заявляється, на фіг.3 приведено "ковзний" режими роботи системи для випадку вимірювання двох координат у площині положення-швидкість, на фіг.4 показано той же "ковзний" режим роботи системи в часовій площині, на фіг.5 показано режим автоколивань у фазовій площині, на фіг.6 пояснюється режим автоколивань в часовій площині, на фіг.7 показано оптимальну за швидкодією траєкторію об'єкта, на фіг.8 показано квазіоптимальну за швидкодією траєкторію навантаження об'єкта, на фіг.9 показано процес настроювання вагових коефіцієнтів системи "Adaline". Послідовність виконання дій в способі настроювання вагових коефіцієнтів системи "Adaline" пояснюється схемою на фіг.1, де показано, що перед початком функціонування в системі керування встановлюють вхідні дані, які складаються з припустимої похибки D* відпрацювання завдання динамічним об'єктом, початкового вектора настроюваних параметрів c0 та початкового стану х(0) динамічного об'єкта, еталонної вирішальної функції F*(с, X(f)) системи Adaline" та додатково встановленого числа перемикань N* сигналу керування на вході динамічного об'єкта. Далі, в процесі настроювання вимірюють не тільки координати D(t), x(t) динамічного об'єкта, а ще й контролюють число перемикань N сигналу керування на вході об'єкта, & при цьому координати фазової точки X1(D(t), x( t )) , яка відповідає моменту першого перемикання, запам'ятовуються. За даними координат Х(t) 81997 6 динамічного об'єкта та вектора настроюваних параметрів с обчислюють значення вирішальної функції F(c, X(t)) системи "Adaline", порівнюють значення отриманої вирішальної функції F(c, X(t)) зі значенням еталонної F*(c, X(t)) для даного моменту часу керування t. На заключній стадії настроювання в разіневідповідності значень вирішальної F(c, X(t)) та еталонної F*(c, X(t)) функцій змінюють початковий вектор настроюваних параметрів с в бік зменшення похибки відпрацювання D(t) з подальшим приведенням її до припустимого значення D* з урахуванням необхідного числа N перемикань & керуючого сигналу та координат X1(D(t), x( t )) фазового стану динамічного об'єкта в момент першого перемикання. Спосіб настроювання системи "Adaline" при керуванні динамічним об'єктом реалізується за допомогою пристрою, який містить (див. фіг.2), як варіант конструктивного виконання, виконавчу частину 1, що складається з нейроконтролера 2, релейного елемента 3, динамічного об'єкта 4, вимірювального каналу 5, що складається з датчика положення б, датчика швидкості 7, обчислювача похибки 8, системи настроювання нейроконтролеру 9, що складається із кодуючих блоків 10, 11, блоку пам'яті 12, обчислювача 13, пристрою логіки 14, що складається із лічильника числа перемикань 15, фіксатора першого перемикання 16, компаратора числа перемикань 17, компаратора похибки 18, а також може бути включено блок зупину та початкових уставок 19. Конструктивно вихід нейроконтролера 2 зв'язаний зі входом динамічного об'єкта 4 через релейний елемент 3. Вихід об'єкта 4 конструктивно зв'язаний зі входами датчиків положення 6 та швидкості 7. Вихід датчику 6 зв'язаний з сигнальними входами D(t) нейроконтролера 2 через обчислювач похибки 8 та кодуючий блок 10, а вихід датчика 7 з & сигнальними входами x( t ) нейроконтролера 2 через кодуючий блок 11, виходи кодуючих блоків 10, 11 зв'язані зі входами вагових коефіцієнтів с, нейроконтролера 2 послідовно через блок пам'яті 12 та обчислювач 13. Для реалізації способу настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічним об'єктом пристрій додатково містить лічильник числа перемикань 16, який зв'язаний з фіксатором першого перемикання 16 і компаратором числа перемикань 17, а також компаратор похибки 18. Фіксатор першого перемикання 16 зв'язаний із блоком пам'яті 12, компаратори числа перемикань 17 та похибки 18 зв'язані з обчислювачем 13. Пристрій, як варіант конструктивного виконання, може додатково містити пристрій зупину та початкових уставок 19, входи якого зв'язані з датчиками положення 6, швидкості 7, виходом компаратора числа перемикань 17, а вихід 19 підключений до входу релейного елемента 3. Пристрій, за допомогою якого реалізується спосіб настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічним об'єктом, працює таким чином. 7 81997 Перед початком роботи системи керування (див. фіг.2) для об'єкта, що знаходиться в початковому стані х(0), встановлюють припустиме значення похибки D* і точне значення мінімального числа перемикань N*. Встановлюють також довільні значення вагових коефіцієнтів нейрорегулятора c0. На вхід системи подають завдання x3 для відпрацювання. Момент часу t подачі завдання на систему керування вважають за початковий, тобто t=0. З цього моменту здійснюють розрахунок похибки і швидкості навантаження за допомогою датчиків положення 6, швидкості 7 та обчислювача похибки 8. Їх значення поступають на кодуючі блоки 10, 11, які перетворюють поточні значення похибки положення та швидкості навантаження об'єкта в цифровий код. Цей код поступає на сигнальні & входи D(t) і x( t ) нейроконтролера 2. На входи вагових коефіцієнтів сi нейроконтролера поступають значення c0 через обчислювач 13. & Нейроконтролер 2 за даними c0 і D(t), x( t ) обчислює значення деякої функції F(c, X(t)), яка в фазовому просторі має назву поверхні перемикань, де X(t) - вектор, компоненти якого складаються з цифрового коду сигналів D(t)=x3(t)& x(t) і x( t ) . Знак функції F(c, X(t)) буде визначати знак сигналу керування u(t) який формує релейний елемент 3, а саме ì + U, якщо F(c, X( t )) > 0, ï u( t ) = í - U, якщо F(c, X( t )) >N*, а сигнал похибки D(t) зменшується за величиною, але знак її відносно D* не змінюється, то розпізнається ситуація 1, тобто система керування працює в "ковзному" режимі (див. фіг.3, 4). Фіксатором першого перемикання 16 надається команда до блока пам'яті на запис & координат D(t) і x( t ) першого перемикання. Обчислювач 13 здійснює корекцію вагових 8 коефіцієнтів ci на величину сигналу першого перемикання. Якщо разом зі зміною знаку керуючої дії здійснюється зміна знаку сигналу похибки D(t) відносно D*, то розпізнається ситуація 2 - режим автоколивань (див. фіг.5, 6). За командою фіксатора 16 здійснюється запис фазової точки першого перемикання до блока пам'яті 12. Обчислювач 13 здійснює корекцію вагових коефіцієнтів за правилом (2) c i = c i-1 - X1( t )signD i-1 де X1(t) - значення фазової точки в момент першого перемикання, сi-1 - ваговий коефіцієнт на (i-1)-му кроці настроювання системи, Di - значення похибки на момент прийняття рішення про останов системи для чергового запуску системи, функція sign(.) ì+ 1, якщо l > 0, ï sign(l) = í - 1, якщо l < 0, ï 0, якщо l = 0. î (3) Правило (2) діє кожного разу, коли не задовільняються умови оптимального режиму об'єкта, тобто не виконуються умови N £ N* і D £ D*. Робота системи закінчується, якщо задовільняються вимоги N £ N* і D £ D* (див. фіг.8). Типовий характер зміни вагових коефіцієнтів cі показаний на фіг.9. В разі, коли розпізнана одна з похибкових ситуацій, не варто чекати тих результатів фазового вектора, коли система зупиниться в районі припустимих похибок D* тому, що інформація для проведення корекції обчислювачем вже є, тобто числа N і Х1, вже відомі. Таким чином, при розпізнаванні похибкової ситуації система може бути зупинена та приведена в початковий стан з подальшою відповідною корекцією вагових коефіцієнтів сі. Операція переводу об'єкту в початковий стан Х(0) здійснюється блоком зупину та початкових уставок 19 за інформацією обчислювача похибки 8, датчика швидкості 7, компаратора числа перемикань 18. Вихідний сигнал блока 19 діє на релейний елемент 3, який встановлює об'єкт 4 в початковий стан, при цьому фазовий вектор становиться рівним початковому значенню X(t)=Х(0). Результат випробування способу, що заявляється, можна відстежити за фіг.4, 6, 8. Так, на фіг.4 представлено розстройку вагових коефіцієнтів нейроконтролера в бік збільшення, що привело до "ковзного" режиму динамічного об'єкта з навантаженням; така сама розстройка в бік зменшення коефіцієнтів привела до режиму автоколивань (див. фіг.6). Після завершення процесу настроювання отримано квазіоптимальний за швидкодією процес керування (див. фіг.8). Порівняння "ковзного" режиму (див. фіг.4) з оптимальним (див. фіг.7) дозволяє оцінити програш в тривалості "ковзного" режиму, в цьому випадку він складає 29%. В той же час квазіоптимальний режим роботи, який отримано після процесу настроювання, програє оптимальному режиму тільки 3%. На процес 9 навчання нейроконтролера для динамічного об'єкта, який досліджувався, витрачено 5 ітерацій для початкової розстройки вагових коефіцієнтів в 100%, яку показано на фіг.3. Підвищення ефективності застосування способу настроювання вагових коефіцієнтів системи "Adaline" при керуванні динамічним об'єктом, що заявляється, у порівнянні з прототипом, полягає в тому, що цей спосіб дозволяє підвищити точність відпрацювання завдання з мінімальними часовими витратами, зменшити тривалість настроювання нейроконтролера за рахунок додаткового контролю числа перемикань та використання в якості навчальної точки фазової точки першого перемикання сигналу керування. При цьому інформація для навчання нейроконтролера береться за поточною лінією перемикання F(c, X(t)), що будується на кожному кроці навчання. Такий спосіб крім кращих характеристик відпрацювання об'єктом завдання має додаткову можливість здійснювати навчання в процесі функціонування системи при зміні параметрів об'єкта, наприклад при зміні навантаження або його початкового стану. В разі постійнодіючого завдання можна значно зменшити час навчання нейроконтролера за рахунок визначення похибкових ситуацій та дострокової корекції вагових коефіцієнтів нейроконтролера. Джерела інформації: 1. Ashow M., Aboshosha A. Adaptive neural control of NPR // Proceeding of Al Azhar Engineering Fifth International Conference AEIC-97, Cairo, Egypt, December 19-22, 1997. - аналог. 2. Widrow В., Groner G.F., Hu M.J., Smith F.W., Specht D„ Talbert L.R. Practical application for adaptive data processing systems. - WESCON Techn. Papers, No 7, 11/4, 1963. - прототип. 81997 10 11 81997 12
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adjustment of weight coefficients of system "adaline" at control of dynamical objects
Автори англійськоюKucherov Dmytro Pavlovych, Bohucharskyi Viacheslav Viktorovych, Rudakov Volodymyr Ivanovych, Hupalo Andrii Yuriiovych, Chipizhko Yurii Anatoliiovych, Turchyn Valentyn Mykolaiovych
Назва патенту російськоюСпособ настройки весовых коэффициентов системы "adaline" при управлении динамическими объектами
Автори російськоюКучеров Дмитрий Павлович, Богучарский Вячеслав Викторович, Рудаков Владимир Иванович, Гупало Андрей Юрьевич, Чипижко Юрий Анатольевич, Турчин Валентин Николаевич
МПК / Мітки
МПК: G05B 11/00, G05B 13/00
Мітки: настроювання, керуванні, об'єктами, вагових, коефіцієнтів, спосіб, системі, adaline, динамічними
Код посилання
<a href="https://ua.patents.su/6-81997-sposib-nastroyuvannya-vagovikh-koeficiehntiv-sistemi-adaline-pri-keruvanni-dinamichnimi-obehktami.html" target="_blank" rel="follow" title="База патентів України">Спосіб настроювання вагових коефіцієнтів системи “adaline” при керуванні динамічними об’єктами</a>
Спосіб настроювання вагових коефіцієнтів двошарового персептрона для рішення задач розпізнавання образів і діагностики
Номер патенту: 49380
Опубліковано: 16.09.2002
Автори: Жеманюк Павло Дмитрович, Субботін Сергій Олександрович, Внуков Юрій Миколайович, Дубровін Валерій Іванович
МПК: G06G 7/60
Мітки: образів, вагових, спосіб, розпізнавання, коефіцієнтів, діагностики, задач, настроювання, персептрона, рішення, двошарового
Формула / Реферат:
Спосіб настроювання вагових коефіцієнтів двошарового персептрона для рішення задач розпізнавання образів і діагностики, який полягає в тому, що класифікацію об’єктів за ознаками здійснюють на основі двошарового персептрона, який перетворює вхідну інформацію у бінарний номер класу екземпляра, який відрізняється тим, що ваги двошарового персептрона настроюють автоматично у безітераційному режимі, для чого здійснюють одномірну класифікацію...
Спосіб настроювання вагових коефіцієнтів тришарового персептрона для вирішення задач розпізнавання образів і діагностики
Номер патенту: 47881
Опубліковано: 15.07.2002
Автори: Дубровін Валерій Іванович, Субботін Сергій Олександрович, Лук'янов Валентин Семенович
МПК: G06G 7/60
Мітки: розпізнавання, діагностики, тришарового, задач, настроювання, спосіб, образів, персептрона, вирішення, вагових, коефіцієнтів
Формула / Реферат:
Спосіб настроювання вагових коефіцієнтів тришарового персептрона для вирішення задач розпізнавання образів і діагностики, який полягає у тому, що класифікацію об'єктів за ознаками роблять на основі тришарового персептрона, що перетворює вхідну інформацію у бінарний номер класу екземпляра, який відрізняється тим, що ваги тришарового персептрона настроюють автоматично у безітераційному режимі на основі інформації, що характеризує поділ об'єктів...
Спосіб визначення вагових коефіцієнтів вихорів оптичного волокна
Номер патенту: 20070
Опубліковано: 15.01.2007
Автори: Рибась Олександр Федорович, Алексєєв Костянтин Миколайович, Фадеєва Тетяна Андріївна, Воляр Олександр Володимирович, Алексєєв Олексій Миколайович
МПК: G02B 6/00
Мітки: коефіцієнтів, оптичного, вихорів, спосіб, волокна, вагових, визначення
Формула / Реферат:
Спосіб визначення вагових коефіцієнтів вихорів оптичного волокна, що включає напрямок випромінювання через поляризатор і мікрооб'єктив на вхідний торець оптичного волокна, напрямок вихідного випромінювання через мікрооб'єктив, другий поляризатор на реєструвальний пристрій, який відрізняється тим, що випромінювання, що минує другий поляризатор, попередньо направляють на послідовно розташовані фотодіод і мікроамперметр, вимірюють залежність...
Спосіб визначення вагових коефіцієнтів вихорів оптичного волокна
Номер патенту: 68651
Опубліковано: 16.08.2004
Автори: Олексіїв Олексій Миколайович, Рибась Олександр Федорович, Воляр Олександр Володимирович
МПК: G02B 6/00
Мітки: визначення, вагових, коефіцієнтів, волокна, оптичного, спосіб, вихорів
Формула / Реферат:
Спосіб визначення вагових коефіцієнтів вихорів оптичного волокна, що включає спрямоване випромінювання на транспарант і його реєстрацію, який відрізняється тим, що випромінювання після транспаранта направляють на пластинку, поляризатор, оптичне волокно, поляризаційний фільтр, і по картині реєстрації визначають ваговий коефіцієнт IV вихору по формулі:
Спосіб адаптивної фільтрації калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків
Номер патенту: 49862
Опубліковано: 15.10.2002
Автор: Ланге Антті Аарне Ілмарі
МПК: G01D 18/00, H03H 21/00
Мітки: системі, параметрів, фільтрації, датчиків, модельних, систем, настроювання, калмана, калібрувальних, адаптивної, динамічних, спосіб
Формула / Реферат:
Спосіб адаптивної фільтрації Калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків, яка супроводжується моделлю зовнішніх подій, у якій вихідні блоки датчиків забезпечують сигнали у відповідь на вказані зовнішні події і де послідовності одночасно оброблюваних значень вихідних сигналів датчиків є довгими, який складається з таких етапів:a) забезпечення блока бази даних для зберігання...
Попередній патент: Порошковий дріт для наплавлення
Наступний патент: Пристрій для транспортування і очистки коренебульбоплодів
Випадковий патент: Шлаковоз