Спосіб адаптивної фільтрації калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків
Формула / Реферат
Спосіб адаптивної фільтрації Калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків, яка супроводжується моделлю зовнішніх подій, у якій вихідні блоки датчиків забезпечують сигнали у відповідь на вказані зовнішні події і де послідовності одночасно оброблюваних значень вихідних сигналів датчиків є довгими, який складається з таких етапів:
a) забезпечення блока бази даних для зберігання інформації інформацією про:
- множину значень вихідних сигналів датчиків у контрольних точках для деяких з вказаних датчиків і множину значень для вказаних зовнішніх подій, відповідних вказаним значенням вихідних сигналів датчиків у контрольних точках, або одночасний ряд вказаних значень вихідних сигналів від суміжних датчиків для порівняння,
- значення вихідних сигналів датчиків, що супроводжуються значеннями модельних і калібрувальних параметрів і значеннями вказаних зовнішніх подій, які відповідають ситуації, та
- регулювання вказаних датчиків і зміни у вказаних зовнішніх подіях, що відповідають новій ситуації,
b) забезпечення блока логіки доступом до вказаних значень вихідних сигналів датчиків із вказаними модельними і калібрувальними параметрами, причому блок логіки має двосторонній зв'язок із блоком бази даних і обчислює початкові значення для невідомих модельних і калібрувальних параметрів, оцінюючи точність, якщо треба, з використанням фільтра верхніх частот Ланге,
c) подача вказаних значень вихідних сигналів з вказаних датчиків, у разі їх наявності, на вказаний блок логіки,
d) забезпечення вказаного блока бази даних інформацією про вказані регулювання і вказані зміни,
е) доступ до поточних значень вказаних модельних і калібрувальних параметрів та до елементів матриці переходів станів, обчислення з використанням формули швидкої фільтрації Калмана (FKF), одержаної зі зворотної формули Фробеніуса (26), де вдосконалення полягає у діагоналізації коваріантної матриці помилок, яка отримується використанням множників Fy, Fs і M у розширеній моделі (8), у вказаному блоці логіки та оновлення вказаних модельних і калібрувальних параметрів та значень вказаних зовнішніх подій і їх точностей, що відповідають новій ситуації,
f) керування сталістю вказаної фільтрації Калмана шляхом відстежування вказаних оцінок точності у вказаному блоці логіки і індикації, коли це необхідно, одного з наступного: додаткових значень вихідних сигналів датчиків, даних про контрольовані точки, порівняння датчиків або реконфігурації системи,
g) підстроювання тих значень вказаних модельних параметрів, для яких доступні сталі оновлення.
Текст
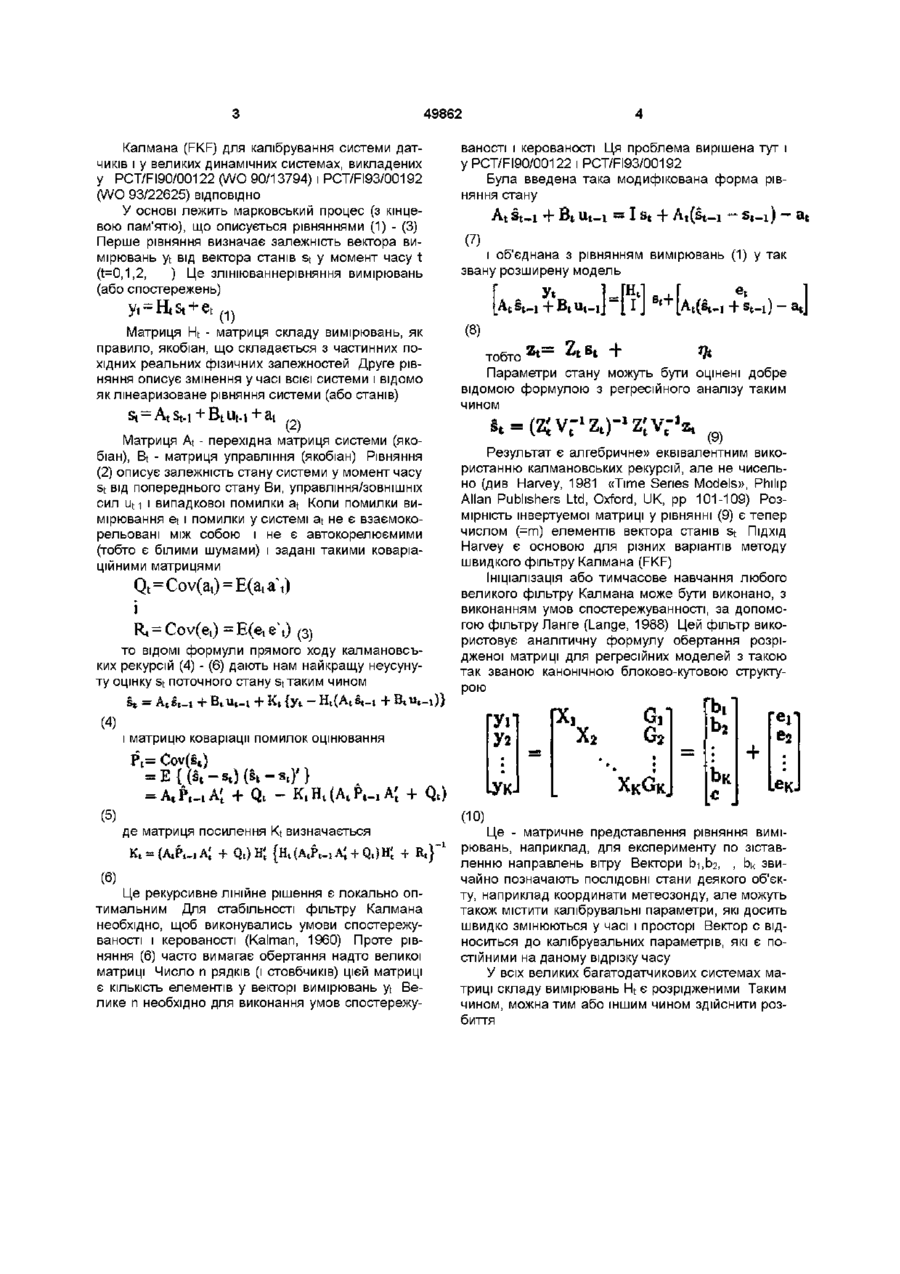
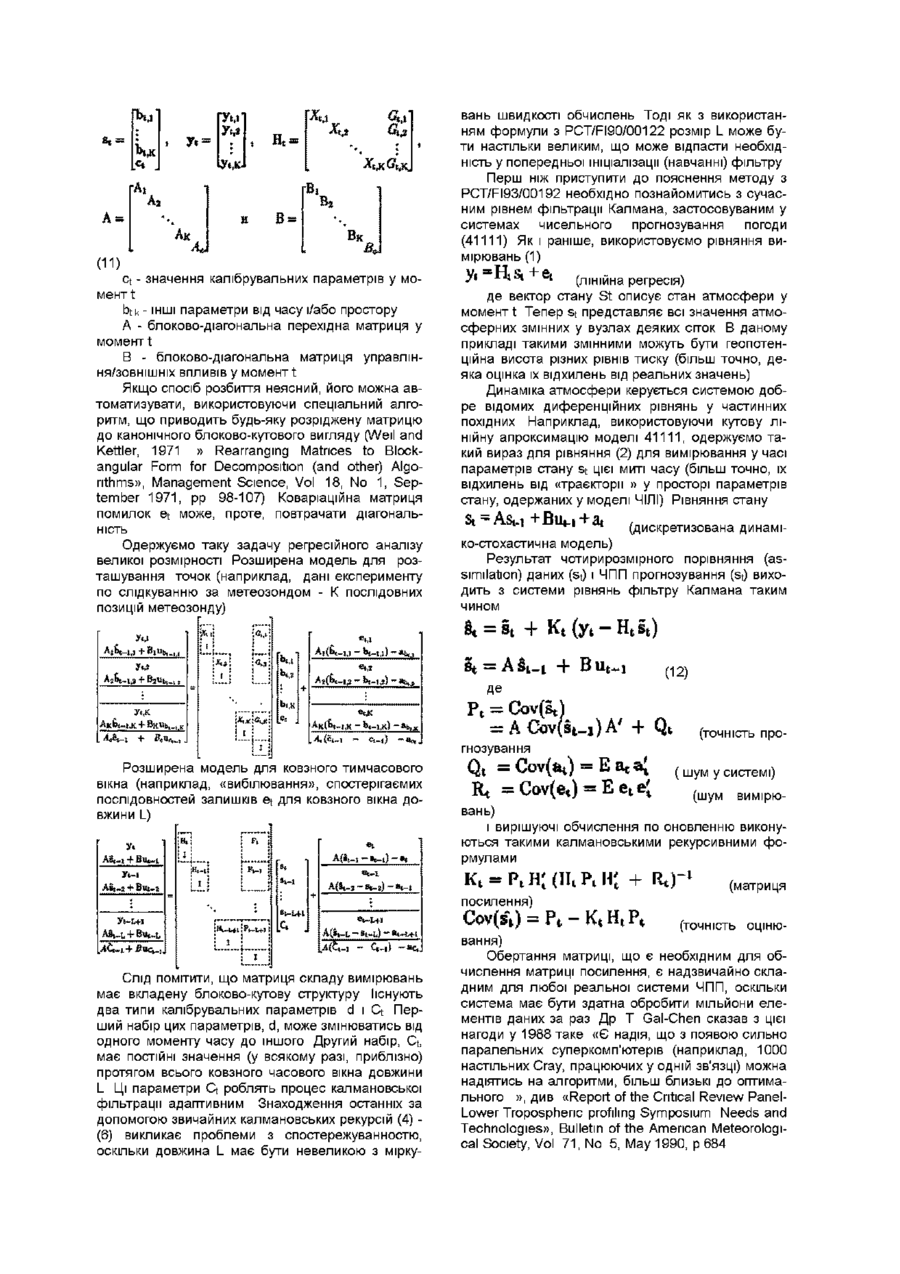
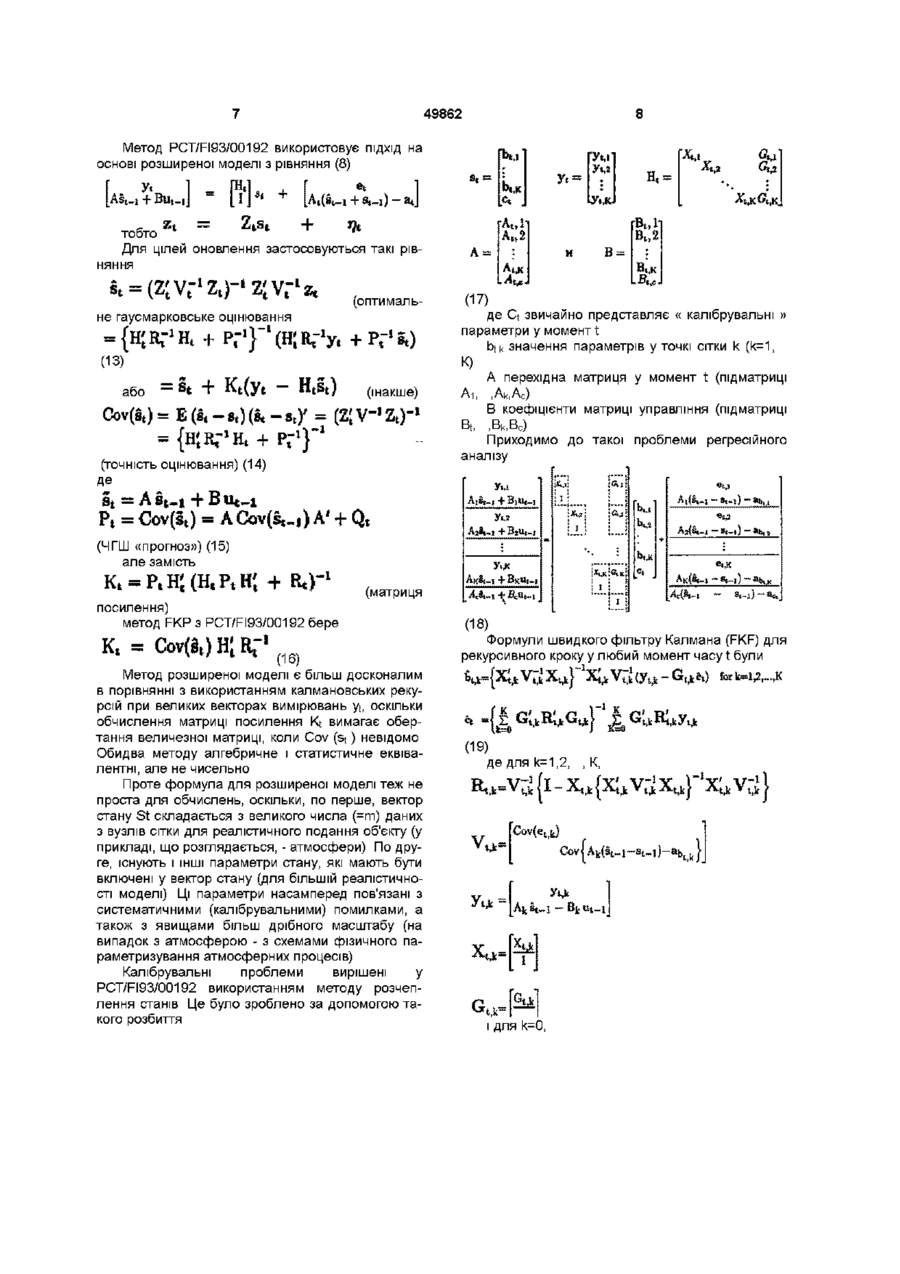
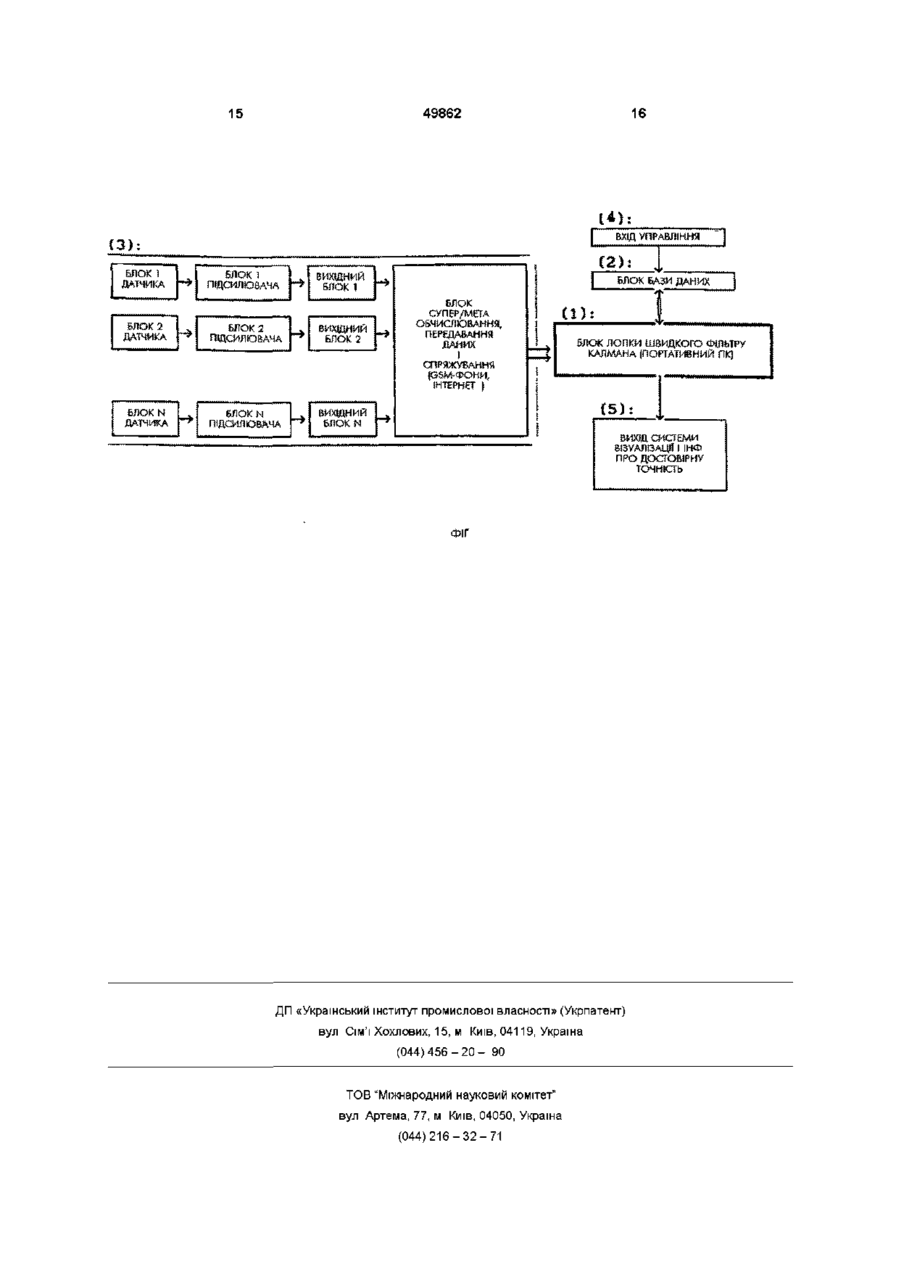
Спосіб адаптивної фільтрації Калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків, яка супроводжується моделлю ЗОВНІШНІХ подій, у якій ВИХІДНІ блоки датчиків забезпечують сигнали у ВІДПОВІДЬ на вказані ЗОВНІШНІ ПОДІЇ І де ПОСЛІДОВНОСТІ одночасно оброблюваних значень вихідних сигналів датчиків є довгими, який складається з таких етапів а) забезпечення блока бази даних для зберігання інформації інформацією про - множину значень вихідних сигналів датчиків у контрольних точках для деяких з вказаних датчиків і множину значень для вказаних ЗОВНІШНІХ ПОДІЙ, ВІДПОВІДНИХ вказаним значенням вихідних сигналів датчиків у контрольних точках, або одночасний ряд вказаних значень вихідних сигналів від суміжних датчиків для порівняння, - значення вихідних сигналів датчиків, що супроводжуються значеннями модельних і калібрувальних параметрів і значеннями вказаних ЗОВНІШНІХ подій, які відповідають ситуації, та - регулювання вказаних датчиків і зміни у вказаних ЗОВНІШНІХ подіях, що відповідають новій ситуації, Цей винахід відноситься до всіх практичних застосувань калмановської фільтрації і особливо до регулювання у динамічних системах, де є необхідність у швидкої і надійної адаптації до різних обставин b) забезпечення блока логіки доступом до вказаних значень вихідних сигналів датчиків із вказаними модельними і калібрувальними параметрами, причому блок логіки має двосторонній зв'язок із блоком бази даних і обчислює початкові значення для невідомих модельних і калібрувальних параметрів, оцінюючи точність, якщо треба, з використанням фільтра верхніх частот Ланге, c) подача вказаних значень вихідних сигналів з вказаних датчиків, у разі їх наявності, на вказаний блок логіки, d) забезпечення вказаного блока бази даних інформацією про вказані регулювання і вказані зміни, є) доступ до поточних значень вказаних модельних і калібрувальних параметрів та до елементів матриці переходів станів, обчислення з використанням формули швидкої фільтрації Калмана (FKF), одержаної зі зворотної формули Фробеніуса (26), де вдосконалення полягає у діагоналізацм коваріантної матриці помилок, яка отримується використанням множників Fy, Fs і М у розширеній моделі (8), у вказаному блоці логіки та оновлення вказаних модельних і калібрувальних параметрів О та значень вказаних ЗОВНІШНІХ ПОДІЙ І їх точностей, що відповідають новій ситуації, f) керування сталістю вказаної фільтрації Калмана шляхом відстежування вказаних оцінок точності у вказаному блоці логіки і індикації, коли це необхідно, одного з наступного додаткових значень вихідних сигналів датчиків, даних про контрольовані точки, порівняння датчиків або реконфігурацм системи, д) підстроювання тих значень вказаних модельних параметрів, для яких доступні сталі оновлення Сучасний рівень техніки Для кращого розуміння суті винаходу рекомендується спочатку познайомитись з технікою звичайних калмановських рекурсій, а також з методами швидкої фільтрації (О 00 49862 Калмана (FKF) для калібрування системи датчиків і у великих динамічних системах, викладених у PCT/FI90/00122 (W0 90/13794) і PCT/FI93/00192 ( W O 9 3 / 2 2 6 2 5 ) В І Д П О В І Д Н О У основі лежить марковський процес (з кінцевою пам'ятю), що описується рівняннями (1) - (3) Перше рівняння визначає залежність вектора вимірювань yt від вектора станів st у момент часу t (t=0,1,2, ) Це злініюваннерівняння вимірювань (або спостережень) ваності і керованості Ця проблема вирішена тут і у PCT/FI90/00122 і PCT/FI93/00192 Була введена така модифікована форма рівняння стану A t §t-i + В | Ut_i = І s t 4- A t (s t _i - s,_ x ) - a t (7) і об'єднана з рівнянням вимірювань (1) у так звану розширену модель s t -i Матриця Ht - матриця складу вимірювань, як правило, якобіан, що складається з частинних похідних реальних фізичних залежностей Друге рівняння описує змінення у часі всієї системи і відомо як лінеаризоване рівняння системи (або станів) Q t = C o v ( a 1 ) = E(a,a'T) і Rt = Cov(e,)=E(e,e't) (3) то ВІДОМІ формули прямого ходу калмановсъких рекурсій (4) - (6) дають нам найкращу неусунуту оцінку st поточного стану st таким чином t (8) = " тобто -ч— Z сt " ь *Н ' Параметри стану можуть бути оцінені добре відомою формулою з регресійного аналізу таким чином s Матриця At - перехідна матриця системи (якобіан), Bt - матриця управління (якобіан) Рівняння (2) описує залежність стану системи у момент часу st від попереднього стану Ви, управління/зовнішніх сил ut і і випадкової помилки at Коли помилки вимірювання et і помилки у системі at не є взаємокорельовані між собою і не є автокорелюємими (тобто є білими шумами) і задані такими коваріаційними матрицями -a t І t t 0 і t z » (g) Результат є алгебричне» еквівалентним використанню калмановських рекурсій, але не чисельно (див Harvey, 1981 «Time Series Models», Philip Allan Publishers Ltd, Oxford, UK, pp 101-109) Розмірність інвертуемої матриці у рівнянні (9) є тепер числом (=т) елементів вектора станів st ПІДХІД Harvey є основою для різних варіантів методу швидкого фільтру Калмана (FKF) Ініціалізація або тимчасове навчання любого великого фільтру Калмана може бути виконано, з виконанням умов спостережуванності, за допомогою фільтру Ланге (Lange, 1988) Цей фільтр використовує аналітичну формулу обертання розрідженої матриці для регресійних моделей з такою так званою канонічною блоково-куто вою структурою s t = A t s t _i + B t u t _i + K t {y t - H t (A t 8t_i + B t u t _ (4) і матрицю коваріацм помилок оцінювання УІ G, G ГЬ. P t = Cov(s t ) = A t P t _ i A I + Q, (5) с KtHi{A»P, fiVL. (10) де матриця посилення Kt визначається ; + (6) Це рекурсивне лінійне рішення є локально оптимальним Для стабільності фільтру Калмана необхідно, щоб виконувались умови спостережуваності і керованості (Kalman, 1960) Проте рівняння (6) часто вимагає обертання надто великої матриці Число п рядків (і стовбчиків) цієй матриці є КІЛЬКІСТЬ елементів у векторі вимірювань yt Велике п необхідно для виконання умов спостережу Це - матричне представлення рівняння вимірювань, наприклад, для експерименту по зіставленню направлень вітру Вектори Ь-і.Ьг, , bk звичайно позначають ПОСЛІДОВНІ стани деякого об'єкту, наприклад координати метеозонду, але можуть також містити калібрувальні параметри, які досить швидко змінюються у часі і просторі Вектор с відноситься до калібрувальних параметрів, які є постійними на даному відрізку часу У всіх великих багатодатчикових системах матриці складу вимірювань Ht є розрідженими Таким чином, можна тим або іншим чином здійснити розбиття Гм Ь a,l Ht Г» А в. (11) вань швидкості обчислень Тоді ЯК З використанням формули з PCT/FI90/00122 розмір L може бути настільки великим, що може відпасти необхідність у попередньої ініціалізації (навчанні) фільтру Перш ніж приступити до пояснення методу з PCT/FI93/00192 необхідно познайомитись з сучасним рівнем фільтрації Калмана, застосовуваним у системах чисельного прогнозування погоди (41111) Як і раніше, використовуємо рівняння вимірювань (1) Уі ct - значення калібрувальних параметрів у момент t bt k - ІНШІ параметри від часу і/або простору А - блоково-діагональна перехідна матриця у момент t В - блоково-діагональна матриця управління/зовнішніх впливів у момент t Якщо спосіб розбиття неясний, його можна автоматизувати, використовуючи спеціальний алгоритм, що приводить будь-яку розріджену матрицю до канонічного блоково-кутового вигляду (Weil and Kettler, 1971 » Rearranging Matrices to Blockangular Form for Decomposition (and other) Algorithms», Management Science, Vol 18, No 1, September 1971, pp 98-107) Коваріаційна матриця помилок et може, проте, повтрачати діагональність Одержуємо таку задачу регресійного аналізу великої розмірності Розширена модель для розташування точок (наприклад, дані експерименту по слідкуванню за метеозондом - К послідовних позицій метеозонду) Уі.і ; • + b,_tt!) Ьі,к • г Розширена модель для ковзного тимчасового вікна (наприклад, «вибілювання», спостерігаємих послідовностей залишків et для ковзного вікна довжини L) H,] j ! F w Уі-І _s і іі (12) st = A s t _ i Де P t = Cov(st) ACov(st_:i)A' + Q t (точність про гнозування і -і Kt(yt-Htit) = •Ам Уі + *ь,,і і і ' Ч ^ '*•'/ (матриця посилення) Cov(s"t) = Pt - K t H( P t вання) (точність оціню Обертання матриці, що є необхідним для обчислення матриці посилення, є надзвичайно складним для любої реальної системи ЧПП, оскільки система має бути здатна обробити мільйони елементів даних за раз Др Т Gal-Chen сказав з цієї нагоди у 1988 таке «Є надія, що з появою сильно паралельних суперкомп'ютерів (наприклад, 1000 настільних Cray, працюючих у одній зв'язці) можна надіятись на алгоритми, більш близькі до оптимального », див «Report of the Critical Review PanelLower Troposphenc profiling Symposium Needs and Technologies», Bulletin of the American Meteorological Society, Vol 71, No 5, May 1990, p 684 49862 Метод PCT/FI93/00192 використовує ПІДХІД на основі розширеної моделі з рівняння (8) , Г L A я *' Ум Ум et •лі,2 Я* и І! 2 Z t S t + тобто Для цілей оновлення застосовуються такі рівняння (оптимальне гаусмарковське оцінювання (13) або = 6 - HtSt) t + K t (yt Cov(st) = Е (І, -1 1 ) (st - y = (2; V Gt,2 (шакше) І Zt)" 1 1 (точність оцінювання) (14) д ~, и В= (17) де Q звичайно представляє « калібрувальні » параметри у момент t btk значення параметрів у точкі сітки k (k=1, К) А перехідна матриця у момент t (підматриці Аі, ,Ак,Ас) В коефіцієнти матриці управління (підматриці Bt, , Bk, Вс) Приходимо до такої проблеми регресійного аналізу Де it = A s t - i H - B u t Р, = Cov(It) = ACov(st_,) A' + Q, _ + B3u, - i Уі.ї _ sst-i 4- B j u , . , (ЧГШ «прогноз») (15) але замість AK(SC-1 ™ (матриця посилення) метод FKP з PCT/FI93/00192 бере Kt = C o v ( s t ) H! Rf 1 Метод розширеної моделі є більш досконалим в порівнянні з використанням калмановських рекурсій при великих векторах вимірювань yt, оскільки обчислення матриці посилення Kt вимагає обертання величезної матриці, коли Cov (st) невідомо Обидва методу алгебричне і статистичне еквівалентні, але не чисельно Проте формула для розширеної моделі теж не проста для обчислень, оскільки, по перше, вектор стану St складається з великого числа (=т) даних з вузлів СІТКИ для реалістичного подання об'єкту (у прикладі, що розглядається, - атмосфери) По друге, існують і ІНШІ параметри стану, які мають бути включені у вектор стану (для більшій реалістичності моделі) Ці параметри насамперед пов'язані з систематичними (калібрувальними) помилками, а також з явищами більш дрібного масштабу (на випадок з атмосферою - з схемами фізичного параметризування атмосферних процесів) Калібрувальні проблеми вирішені у PCT/FI93/00192 використанням методу розчеплення станів Це було зроблено за допомогою такого розбиття І ] d t (St_t s i-l * -1 (18) Формули швидкого фільтру Калмана (FKF) для рекурсивного кроку у любий момент часу t були (19) де для k=1,2, , К, Gov(elrk) xt,k= V I і 1-= і для к=0, 49862 G, Точності опанування (assimilation) даних одержувались з рівняння (20) таким чином 'j C2 4 D2SD^DKSDJ -SDJ —SD' -SDl -D K ,S S (20) —1 для Jc=l,2,-,K для k=l,2,-..,K JJ \ —1 l]k R [ , k G t ] k } _J Формули швидкого фільтру Калмана (FKF), ВІДОМІ з PCT/FI90/00122 і PCT/FI93/00192, виходять з припущення, що ковариаційна матриця \Д у рів(9) і (13), ВІДПОВІДНО, є блоково діагональною Це видно з формули (19), де ці діагональні блоки записані як v t i k = Cov(etik) Ясно, що на випадок адаптивної фільтрації Калмана і 4-розмірного опанування (асиміляції) даних, що оцінки послідовних векторів стану Sti, St2, St3, є крос-1 авто-корелюємими Таким чином, існує необхідність використати методи швидкої фільтрації Калмана (FKF) у сполученні з адаптивною фільтрацією Калмана (AKF) з рівної або кращою швидкістю обчислень, надійністю, точністю і вартістю, ніж можуть запропонувати ІНШІ методи калмановської фільтрації Винайдений метод для обробки коваріацій помилок оцінювання буде даний нижче Коротке викладення суті винаходу Описані вище потреби задовольняє метод адаптивної швидкої фільтрації Калмана (AFKF) для калібрування/піднастроєння різних параметрів у реальному часу (або у близькому до цього режиму) Обидва виду помилок (у системі і у вимірюваннях) надаються «відбіленими» і частково ортогоналізованими, як це описано у даної специфікації Обчислення по AFKF зроблені як можна більш близькими до оптимального фільтру Калмана, що необхідно для задоволення умов спостережуваності і керованості Оцінювані дисперсії і коваріацм помилок оцінювання є інструментом слідкування за сталістю фільтру Найкращий спосіб здійснення винаходу Перепишемо лінеаризоване рівняння вимірювання (спостереження) + Дослідження по калмановської фільтрації були також проведені у Stephen E Conn and David F Parnsh (1991) «The Behavior of Forecast Error Covariances for a Kalman Filter in Two Dimensions», Monthly Weather Review of the American Meteorological Society, Vol 119, pp 1757-1785 Проте, ідеальні системи фільтрів Калмана з подібних досліджень досі недоступні для чотирьох вимірювань (простір і час), оскільки вимагається надійне оцінювання і обертання ковариаційної матриці параметрів стану Як пише Ін Heikki Jarvmen «В метеорологи розмірність (= т) вектора станів St може бути 100 000 - 10 000 000 Це робить неможливим на практиці точно обробляти ковариаційну матрицю » Див «Meteorological Data Assimilation as a Vanational Problem», Report No 43 (1995), Department of Meteorology, University of Helsinki, p 10 Dr Adrian Simmons з ECMWF підтверджує, що «базовий ПІДХІД до фільтрації Калмана добре обгрунтуваний теоретично, але потрібні обчислювальні ресурси роблять повне застосування фільтру важко здійснимим » Див ECMWF Newsletter Number 69 (Spring 1995), р 12 няннях 10 e t ( 2 1 ) де et тепер представляє "білий" шум, який не КОреЛЮЄ НІ 3 et 1, et2, , HI 3 St 1, St2, , HI 3 3t, 3t 1, at 2, Матриця Ht - та ж матриця складу вимірювань, що і раніше, вона складається з частинних похідних фізичних залежностей між вимірюваннями yt і параметрами стану st, див формулу розбиття (11) на стор 3 (старе припущення про блокову діагональність більше не працює для матриц y А і В) Матриця F t описує, як систематичні помилки вимірювань залежать від калібрування або параметрів «калібрувального типу», вектора С t, які ПОСТІЙНІ за часом або міняються дуже повільно Стовбчики матриц Fyt,Fyt=i,Fyt2 складаються з частинних похідних, хвилеподібних функцій типу синусоїд, квадратних хвиль, ( л- подібних функцій і т п і/або емпіричних ортогональних функцій, залежно від того, що нам відомо про фізичні залежності, регресію і авторегресію систематичних помилок у вимірюваннях Елементи оціненого вектора Сг будуть потім визначати амплітуди «червоного» шуму Тут ми зішлемось на схожу розширену модель для ковзного часового вікна для «відбілювання» спостеежних «шовацій» послідовностей вимірювань у нижньої частині стор 4 Аналогічно перепишемо лінеаризоване рівняння системи або станів Bt = (At + d A e ) s t _ i + Btut_, + FJCt+at (22) ДЄ at Тепер представляє "білий" шум, який не КОреЛЮЄ НІ 3 et, et 1, et2, HI 3 St 1, St2, HI 3 3t 1, 3t 2, Матриця At та ж сама перехідна матриця, що складається з частинних' похідних фізичних залежностей між станами st і попередніми станами st 1 11 49862 s Матриця F описує, як систематичні помилки динамічної моделі (наприклад, ЧПП) залежать від калібрування або подібних їй параметрів, вектор Q, які ПОСТІЙНІ у часі або міняються дуже повільно s s s Стовбчики матриц F t,F t i,F t 2 складаються з частинних похідних, хвилеподібних функцій типу синусоїд, квадратних хвиль, (л- подібних функцій і т п і/або емпіричних ортогональних функцій, залежно від того, що нам відомо про фізичні залежності, регресію і авторегресію систематичних помилок у моделі системи Елементи оціненого вектора Q будуть потім визначати амплітуди «червоного» шуму Матриця dAt говорить нам про те, як систематичні помилки переходу у динамічної моделі (наприклад, ЧПП) залежать від умов середовища (у прикладі - від переважаючих погодних умов) Якщо вони невідомі, але міняються повільно, підстроювання здійснюється за допомогою ковзного середнього у з'єднанні з методом FKF, як це описано далі Вплив виводиться з рівняння системи (22) і переписується таким чином [ 12 Треба також помітити, що матриця М и не може мати свій повний розмір (mxm ), як показано у рівнянні (23), оскільки інакше умова спостережуванності перестає виконуватись-(надто багато невідомих) Таким чином, матриця Mt 1 має бути ефективно стиснута для представлення тільки тих елементів матриці At, які відповідають серйозним помилкам при переході від одного стану до іншого Це може бути зроблено, наприклад, з використанням методів максимальної кореляції В ДІЙСНОСТІ, спорадичні утвіри і утвіри, що рухаються повільно , можуть створюватись на просторі векторів параметрів стану Вони представляють собою явища дрібного масштабу і не можуть бути адекватно описані перехідними матрицями, що обпираються тільки на рівняння моделі Щоб зберегти сталість фільтру, всі оцінені елементи матриці dAt підтримуються спостережуваним! у рухомому середньому вимірювань, наприклад, простежуванням їх оцінюваних коваріацій у рівнянні (20) Формула адаптивного швидкого фільтру Калмана (AFKF) для часового вікна довжини L у момент часу t (23) де Mt і - матриця з m діагональних матриц розміру mxm, si,S2, ,s m - m скалярних елементів вектора (25) де для 1=0,1,2, b i0 , L-1, с т а н у S T 1, rt - вектор-стовбчик з усіх mxm елементів матриці dAt Слід помітити, що рівняння (23) має змінений порядок СПІВМНОЖНИКІВ (у правої частині), що робить можливою оцінити елементи матриці dAt як звичайні регресійні параметри Далі маємо таку задачу регресійного аналізу Розширена модель для ковзного часового вікна (для «відбілювання» іноваційних послідовностей залишків et і at для (ковзної) реалізації довжини L) в.; г', F" M_ ,i Cov(e M ) )-% -a,., і для I=L **•. ' і І ASCt-i - C,. l-ec, (24) структуру Тут можуть з'явитись три типи «калібрувальних» параметрів Перший тип, ct, входить у дані у кожен момент часу t Інші два типи представлені вектором Ct Перший набір цих параметрів використовується для «відбілювання» і часткової ортогоналізацм помилок вимірювань і системи (тобто для блокової діагоналізацм матриці коваріацм помилок) Другий набір, тобто rt, використовується для корекції грубих помилок у перехідній матриці Останні два набору параметрів мають більш-меньш ПОСТІЙНІ значення протягом довгого ковзного вікна і роблять процес фільтрації адаптивним Vt_L=Cov{ A Іноді буває необхідно відфільтрувати за формою деякі з компонентів помилок для кращого наближення до оптимальность У цьому випадку одиничні матриці (І) слід замінити ВІДПОВІДНИМ ЧИНОМ Формули FKF, дані туг, у PCT/FI90/00122 і PCT/FI93/00192 засновуються на припущенні, що коваріаційні матриці є блоково-діагональними Спроби знайти параметри Qsa допомогою звичай 13 49862 них калмановських рекурсій (4) - (6) приречені на провал з-за серйозних проблем з спостережуваністю і керованістю, оскільки з обчислювальних міркувань довжина вікна L не може бути взята досить великою До щастя, при використанні формул FKF, часове вікно може бути настільки довгим, що ініціалізація фільтру може опинитись надмірною РІЗНІ формули для адаптивного швидкого фільтру Калмана можуть бути одержані з системи нормальних рівнянь лінеаризованого регресивного рівняння (24) рекурсивним використанням формули Фробеніуса ВТ1 ГА"1 + А"1ВН-1СА-1 -А-'ВН"1 CDJ 'I -H-SCA-J Н-1 (26) де H=D-CA В Формули (20) і (25), як і ІНШІ ВИДИ формул, одержаних з (26) застосуванням формули Фробеніуса відносяться до винайденого методу Наприклад, існують ефективні методи обертання симетричних стрічко-діагональних матриц Матриці коваріацм помилок у моделях ЧПП є звичайно стрічко-діагональними Ми можемо слідувати прямо з системи рівнянь (8) без занурення параметрів стану s у блоки спостережень регресивної задачі (18) їх матриця коваріацм помилок може бути звернута як один великий блок і застосування формули Фробеніуса приводить до схожих формул FKF (25) Всі матриці, які обертаються для рішення регресійної моделі є невеликими завдяки використанню заявлених піваналітичних обчислювальних методів На фіг 1 показано переважне втілення винаходу Воно описано нижче Супернавігатор (фіг 1), заснований на блокнотном ПК, який виконує функції калмановської фільтрації блока (1) логіки, використовуючи узагальнений метод швидкої фільтрації Калмана (FKF) Загальна схема містить у себе датчики, систему обробки даних і передавальну систему (3) для, наприклад, національної атмосферноокеанічної служби і, можливо, готовий GSP приймач Блок бази даних (2), працюючий на ПК, містить відновлювану контрольну інформацію і інформацію про роботу всіх підсистем, а також допоміжну інформацію, таку, як географічні карти Грунтуючись на цих даних, блок (1) логіки здійснює 3розмірну візуалізацію (5) поточної ситуації у реальному часі з використанням рекурсій FKF для системи рівнянь (24) і ситуації у найближчому майбутньому, використовуючи прогноз з рівнянь (15) Заслуговуючу довіри інформацію проточність можна одержувати на випадок, якщо у системі спостереження (3) виконуються умови сталості фільтру Калмана Ці дисперсії і коваріацм обчис 14 люються з використанням рівнянь (15) і (20) Централізована система обробки даних дає оцінки перехідної матриці А для кожного кроку за часом t Ці матриці потім локально підстроюються (1) для урахування всіх дрібномасштабних переходів, що спостерігаються, які можуть статись у атмосферно-океанічному середовищі (див , наприклад, Cotton, Thompson & Mielke, 1994 «Real-Time Mesoscale Prediction on Workstations», Bulletin of the American Meteorological Society, vol 75, No 3, March 1994, pp 349-362 Фахівці у даної області можуть помітити, що багато варіантів даного винаходу можуть бути одержані без відриву від духу даного винаходу Таким чином, має бути зрозуміло, що широту застосування даного винаходу не слід розглядати обмеженої тільки описаним вище втіленням, за вийнятком тих випадків, коли таке обмеження міститься у формулі винаходу Список посилань (1) Kalman, R Е (I960) «A new approach to linear filtering and prediction problems» Trans ASME J of Basic Eng 82 35-45 (2) Lange, A A (1982) «Multpath propagation of VLF Omega signals» IEEE PLANS '82 - Position Location and Navigation Symposium Record, December 1982, 302-309 (3) Lange, A A (1984) «Integration, calibration and intercompanson of windfindmg devices» WMO Instruments and Observing Methods Report No 15 (4) Lange, A A (1988a) «A high-pass filter for optimum calibration of observing systems with applications" Simulation and Optimization of Large Systems, edited by A J Osiadacz, Oxford University Press/Clarendon Press, Oxford, 1988, 311-327 (5) Lange, A A (1988b) «Determination of the radiosonde biases by using satellite radiance measurements» WMO Instruments and Observing Methods Report No 33, 201-206 (6) Lange, A A (1990) «Apparatus and method for calibrating a sensor system» International Application Published under the Patent Cooperation Treaty (PCT), World Intellectual Property Organization, International Bureau, WO 90/13794, PCT/FI90/00122, 15 November 1990 (7) Lange, A A (1993) «Method for Fast Kalman Filtering in large dynamic systems» International Application Published under the Patent Cooperation Treaty (PCT), World Intellectual Property Organization, International Bureau, WO 93/22625, PCT/FI93/00192, 11 November 1993 (8) Lange, A A (1994) «A surface-based hybrid upper-air sounding system» WMO Instruments and Observing Methods Report No 57,175-177 49862 15 16 И): ВХІД УПРАВЛІННЯ (3): БЛОК 1 ДАТЧИКА БЛОК 2 ДАТЧИКА БЛОКЫ ДАТЧИКА 1 БЛОК 1 ПІДСИЛЮВАЧА БЛОК 2 ПІДСИЛЮВАЧА ЪЯОКЫ ПІДСИЛЮВАЧА вихщний БЛОК Ї ВИХЩНИЙ БЛОК 2 (2): >-* БЛОК СУПЕР/МЕТА ОБЧИСЛЮВАННЯ, ПЕРЕДАВАННЯ ДАНИХ 1 СПРЯЖУВАИНЯ (GSM-ФОНИ, 1НТЕРНЄТ ) 1 ( 1 ) : 1 КАЛМАНА (ПОРТАТИВНИЙ ПК) І і (5): . ВИХІД СИСТЕМИ 8ІЗУАЛІЗАЦІІ1 ІНФ ПРО ДОСТОВІРНУ ТОЧНІСТЬ ФІГ ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 1 БЛОК логіки швидкого ФІЛЬТРУ ! ВИХЩНИЙ БЛОКИ і &ЯОК БАЗИ ДАНИХ !
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adaptive kalman filtration used for adjusting model parameters and calibrating transducers in dynamic systems
Назва патенту російськоюМетод адаптивной калмановской фильтрации, используемый для настройки параметров моделей и калибровки датчиков в динамических системах
МПК / Мітки
МПК: G01D 18/00, H03H 21/00
Мітки: систем, параметрів, спосіб, системі, настроювання, датчиків, калібрувальних, адаптивної, калмана, фільтрації, динамічних, модельних
Код посилання
<a href="https://ua.patents.su/8-49862-sposib-adaptivno-filtraci-kalmana-dlya-dinamichnikh-sistem-nastroyuvannya-modelnikh-i-kalibruvalnikh-parametriv-sistemi-datchikiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивної фільтрації калмана для динамічних систем настроювання модельних і калібрувальних параметрів системи датчиків</a>
Спосіб визначення похибок датчиків систем автоматичного регулювання параметрів технологічних процесів та пристрій для його здійснення
Номер патенту: 18197
Опубліковано: 01.07.1997
Автори: Шевченко Костянтин Леонідович, Дубровний Віктор Опанасович, Скрипник Юрій Олексійович
МПК: G05B 23/00
Мітки: датчиків, процесів, похибок, визначення, здійснення, автоматичного, пристрій, параметрів, спосіб, регулювання, технологічних, систем
Формула / Реферат:
1. Способ определения погрешностей датчиков систем автоматического регулирования параметров технологических процессов, заключающийся в том, что задатчиком устанавливают требуемое значение параметра технологического процесса, изменяют выходной сигнал датчика несколько раз, меняя соответствующим образом измеряемый параметр технологического процесса и вычисляют погрешности датчика по значениям калиброванных воздействий на выходной сигнал...
Система природного освітлення приміщення та спосіб настроювання системи
Номер патенту: 32444
Опубліковано: 15.12.2000
Автори: Крижов Гарольд Петрович, Боржковський Леонард Степанович, Коротя Борис Вікторович, Удод Євген Іванович
МПК: F21S 19/00, F24J 2/00
Мітки: освітлення, система, приміщення, настроювання, природного, спосіб, системі
Текст:
...лучи, непосредственно идущие от Солнца, и, кроме того, принимаются отраженные лучи от всего небосвода, включая рассеянное отражение света от облаков и других объектов. В результате увеличивается эффективность использования заявленного технического решения и повышается удобство эксплуатации системы наряду с улучшением его экономических показателей (повышается надежность, снижаются затраты на переориентацию в процессе эксплуатации, создаются...
Спосіб визначення параметрів коливальної системи
Номер патенту: 35822
Опубліковано: 16.04.2001
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: G01H 13/00, G01M 7/00
Мітки: системі, параметрів, спосіб, визначення, коливальної
Формула / Реферат:
Спосіб визначення параметрів коливальної системи, по якому жорстко закріплюють на платформі віброзбуджувача першу масу, збуджують коливання другої маси, установленій на першій за допомогою пружного елемента, вимірюють частоту власних коливань другої маси, з'єднують першу масу з другою, установлюють сумарну масу на платформі віброзбуджувача за допомогою пружного елемента, збуджують коливання сумарної маси, вимірюють частоту власних коливань...
Адаптивний фільтр оцінки параметрів траєкторії цілі
Номер патенту: 48843
Опубліковано: 15.08.2002
Автори: Челпанов Артем Володимирович, Фик Олександр Ілліч, Карлов Володимир Дмитрович, Савченко Микола Павлович
МПК: G01S 13/00, G01S 13/52
Мітки: адаптивний, цілі, фільтр, параметрів, траєкторії, оцінки
Формула / Реферат:
Адаптивний фільтр оцінки параметрів траєкторії цілі, що містить блок обчислення кореляційної матриці помилок, послідовно з'єднані блок обчислення оцінок параметрів, пристрій що запам'ятовує та блок екстраполяції параметрів, який відрізняється тим, що додатково введено блок фазометра і вузол оцінки швидкості та прискорення у складі послідовно з'єднаних блоків генератора опорних функцій, блоку вирахування, корелятора і блоку формування оцінок,...
Спосіб калібрування та повірки силовимірювальних датчиків у системі контролю натягу армоканатів
Номер патенту: 31547
Опубліковано: 15.12.2000
Автори: Нікітінський Михайло Павлович, Браз Вадим Давидович, Орлов Валерій Олександрович, Абарбарчук Ігор Азарович
МПК: G01L 1/22
Мітки: силовимірювальних, калібрування, системі, армоканатів, спосіб, датчиків, контролю, натягу, повірки
Текст:
...Індуктованих показань силовимірювального датчика , що ка лібрують та зразкових засобів вимірювань під час впливу на них з £ даних зусиль, провести точне масштабування апаратури Індикації СІ ловимірювальних датчиків, що калібрують, яке надає їм можливість з необхідною точністю постійно визначати натяг армоканату . Новина способу полягас у створенні таких вихідних умов для п чатку вимірювань, зв'язаних з особливостями вбудови...
Попередній патент: Засіб для лікування хворих з симптомами диспепсії на основі апф-інгібітора
Наступний патент: Цінні папери
Випадковий патент: Спосіб отримання полімерної композиції