Робоче обладнання для демонтажу трубопроводів
Номер патенту: 82645
Опубліковано: 12.08.2013
Автори: Діденко Леонід Михайлович, Клименко Ганна Олександрівна, Мелашич Василь Васильович

Формула / Реферат
Робоче обладнання для демонтажу трубопроводів, що містить двосекційну стрілу, модуль орієнтації, рукоять, до якої шарнірно прикріплені дві щелепи, яке відрізняється тим, що щелепи у нижній частині оснащені гострими прямолінійними піками, а у верхній - з'єднані між собою шарнірно-важільним механізмом, оснащеним гідроциліндром керування, встановленим у внутрішній порожнині рукояті.
Текст
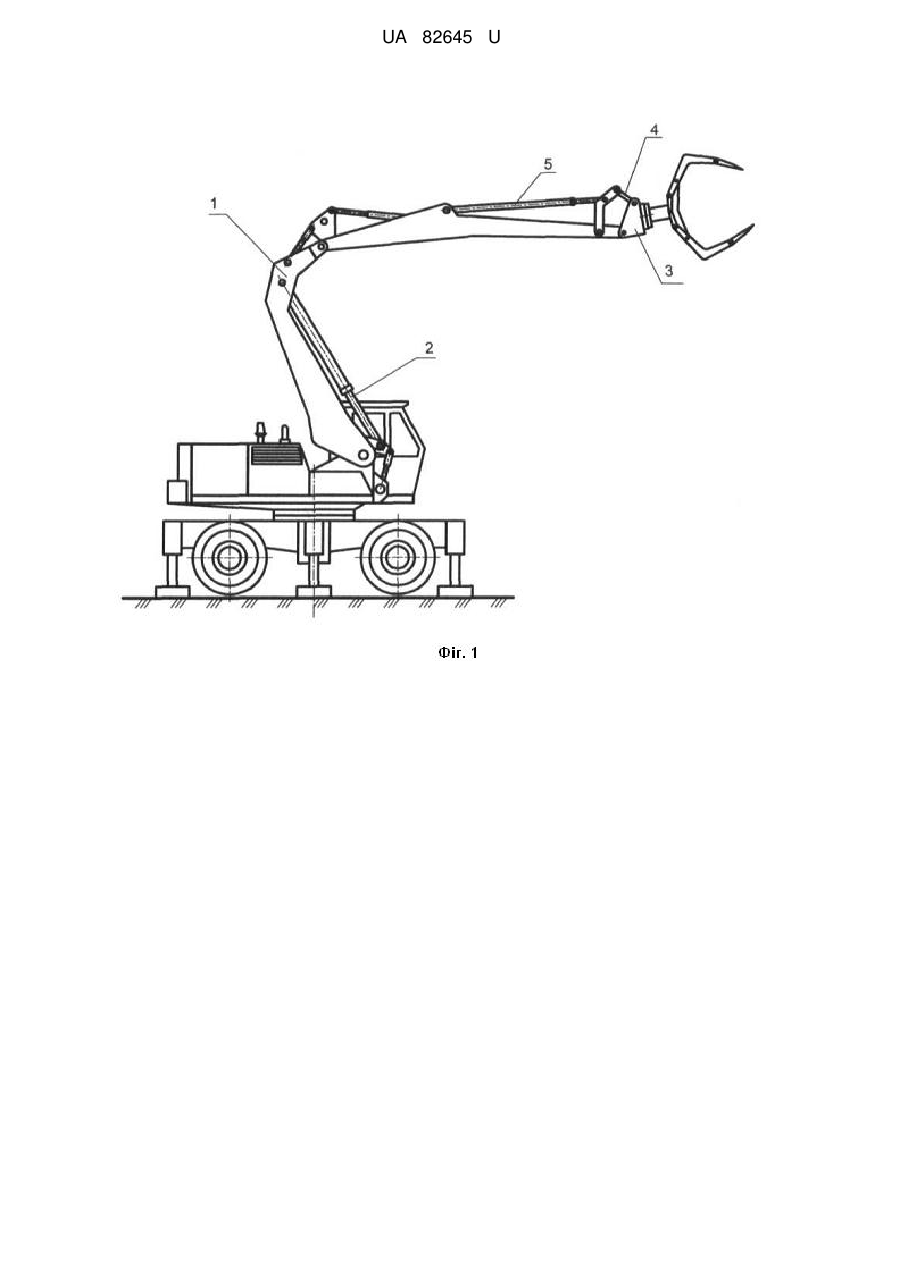
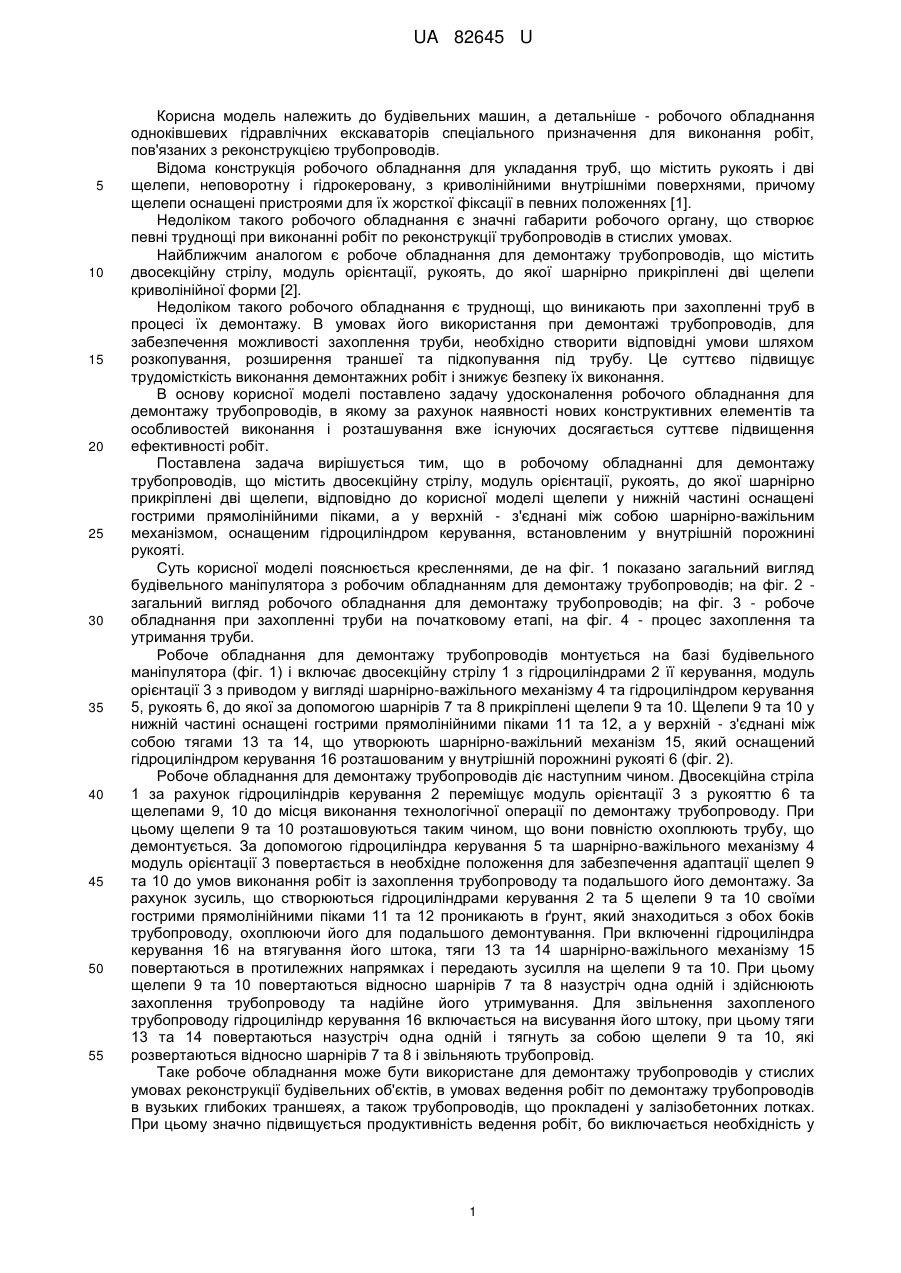
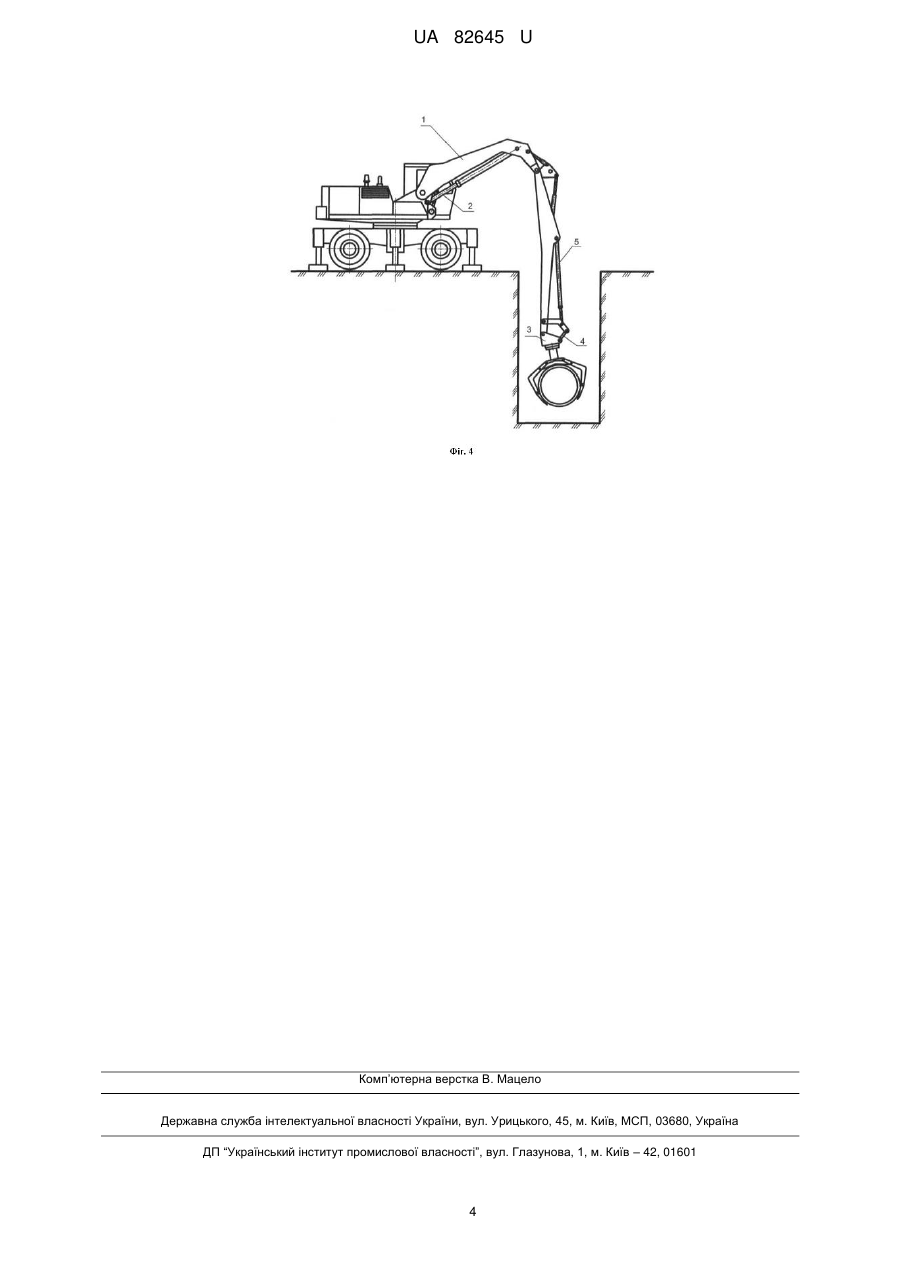
Реферат: Робоче обладнання для демонтажу трубопроводів містить двосекційну стрілу, модуль орієнтації, рукоять, дві щелепи, гострі прямолінійні піки, шарнірно-важільний механізм, гідроциліндр керування. UA 82645 U (12) UA 82645 U UA 82645 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до будівельних машин, а детальніше - робочого обладнання одноківшевих гідравлічних екскаваторів спеціального призначення для виконання робіт, пов'язаних з реконструкцією трубопроводів. Відома конструкція робочого обладнання для укладання труб, що містить рукоять і дві щелепи, неповоротну і гідрокеровану, з криволінійними внутрішніми поверхнями, причому щелепи оснащені пристроями для їх жорсткої фіксації в певних положеннях [1]. Недоліком такого робочого обладнання є значні габарити робочого органу, що створює певні труднощі при виконанні робіт по реконструкції трубопроводів в стислих умовах. Найближчим аналогом є робоче обладнання для демонтажу трубопроводів, що містить двосекційну стрілу, модуль орієнтації, рукоять, до якої шарнірно прикріплені дві щелепи криволінійної форми [2]. Недоліком такого робочого обладнання є труднощі, що виникають при захопленні труб в процесі їх демонтажу. В умовах його використання при демонтажі трубопроводів, для забезпечення можливості захоплення труби, необхідно створити відповідні умови шляхом розкопування, розширення траншеї та підкопування під трубу. Це суттєво підвищує трудомісткість виконання демонтажних робіт і знижує безпеку їх виконання. В основу корисної моделі поставлено задачу удосконалення робочого обладнання для демонтажу трубопроводів, в якому за рахунок наявності нових конструктивних елементів та особливостей виконання і розташування вже існуючих досягається суттєве підвищення ефективності робіт. Поставлена задача вирішується тим, що в робочому обладнанні для демонтажу трубопроводів, що містить двосекційну стрілу, модуль орієнтації, рукоять, до якої шарнірно прикріплені дві щелепи, відповідно до корисної моделі щелепи у нижній частині оснащені гострими прямолінійними піками, а у верхній - з'єднані між собою шарнірно-важільним механізмом, оснащеним гідроциліндром керування, встановленим у внутрішній порожнині рукояті. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показано загальний вигляд будівельного маніпулятора з робочим обладнанням для демонтажу трубопроводів; на фіг. 2 загальний вигляд робочого обладнання для демонтажу трубопроводів; на фіг. 3 - робоче обладнання при захопленні труби на початковому етапі, на фіг. 4 - процес захоплення та утримання труби. Робоче обладнання для демонтажу трубопроводів монтується на базі будівельного маніпулятора (фіг. 1) і включає двосекційну стрілу 1 з гідроциліндрами 2 її керування, модуль орієнтації 3 з приводом у вигляді шарнірно-важільного механізму 4 та гідроциліндром керування 5, рукоять 6, до якої за допомогою шарнірів 7 та 8 прикріплені щелепи 9 та 10. Щелепи 9 та 10 у нижній частині оснащені гострими прямолінійними піками 11 та 12, а у верхній - з'єднані між собою тягами 13 та 14, що утворюють шарнірно-важільний механізм 15, який оснащений гідроциліндром керування 16 розташованим у внутрішній порожнині рукояті 6 (фіг. 2). Робоче обладнання для демонтажу трубопроводів діє наступним чином. Двосекційна стріла 1 за рахунок гідроциліндрів керування 2 переміщує модуль орієнтації 3 з рукояттю 6 та щелепами 9, 10 до місця виконання технологічної операції по демонтажу трубопроводу. При цьому щелепи 9 та 10 розташовуються таким чином, що вони повністю охоплюють трубу, що демонтується. За допомогою гідроциліндра керування 5 та шарнірно-важільного механізму 4 модуль орієнтації 3 повертається в необхідне положення для забезпечення адаптації щелеп 9 та 10 до умов виконання робіт із захоплення трубопроводу та подальшого його демонтажу. За рахунок зусиль, що створюються гідроциліндрами керування 2 та 5 щелепи 9 та 10 своїми гострими прямолінійними піками 11 та 12 проникають в ґрунт, який знаходиться з обох боків трубопроводу, охоплюючи його для подальшого демонтування. При включенні гідроциліндра керування 16 на втягування його штока, тяги 13 та 14 шарнірно-важільного механізму 15 повертаються в протилежних напрямках і передають зусилля на щелепи 9 та 10. При цьому щелепи 9 та 10 повертаються відносно шарнірів 7 та 8 назустріч одна одній і здійснюють захоплення трубопроводу та надійне його утримування. Для звільнення захопленого трубопроводу гідроциліндр керування 16 включається на висування його штоку, при цьому тяги 13 та 14 повертаються назустріч одна одній і тягнуть за собою щелепи 9 та 10, які розвертаються відносно шарнірів 7 та 8 і звільняють трубопровід. Таке робоче обладнання може бути використане для демонтажу трубопроводів у стислих умовах реконструкції будівельних об'єктів, в умовах ведення робіт по демонтажу трубопроводів в вузьких глибоких траншеях, а також трубопроводів, що прокладені у залізобетонних лотках. При цьому значно підвищується продуктивність ведення робіт, бо виключається необхідність у 1 UA 82645 U 5 розкопуванні широкої траншеї у місці, де буде здійснюватися захоплення труби, а надійне утримання труби в процесі переміщення забезпечує підвищення безпеки виконання таких робіт. Джерела інформації: 1. Деклараційний патент на корисну модель № 15557. Робоче обладнання для укладання труб. Бюл. № 7, 2006 р. 2. Франкель Г.Ю. Роботизация процессов в строительстве. - М.: Стройиздат, 1987. - 173 с. (стр. 78, рис. 17). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Робоче обладнання для демонтажу трубопроводів, що містить двосекційну стрілу, модуль орієнтації, рукоять, до якої шарнірно прикріплені дві щелепи, яке відрізняється тим, що щелепи у нижній частині оснащені гострими прямолінійними піками, а у верхній - з'єднані між собою шарнірно-важільним механізмом, оснащеним гідроциліндром керування, встановленим у внутрішній порожнині рукояті. 2 UA 82645 U 3 UA 82645 U Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюWork equipment for pipeline dismantling
Автори англійськоюMelashych Vasyl Vasyliovych, Didenko Leonid Mykhailovych, Klymenko Hanna Oleksandrivna
Назва патенту російськоюРабочее оборудование для демонтажа трубопроводов
Автори російськоюМелашич Василий Васильевич, Диденко Леонид Михайлович, Клименко Анна Александровна
МПК / Мітки
МПК: E02F 3/28
Мітки: обладнання, демонтажу, робоче, трубопроводів
Код посилання
<a href="https://ua.patents.su/6-82645-roboche-obladnannya-dlya-demontazhu-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Робоче обладнання для демонтажу трубопроводів</a>
Робоче обладнання для демонтажу труб
Номер патенту: 40671
Опубліковано: 27.04.2009
Автори: Рибалка Катерина Анатоліївна, Сафонов Володимир Васильович, Мелашич Василь Васильович, Діденко Леонід Михайлович, Мелашич Сергій Васильович
МПК: E02F 3/28
Мітки: обладнання, труб, робоче, демонтажу
Формула / Реферат:
Робоче обладнання для демонтажу труб, що містить стрілу, рукоять, до якої прикріплені дві гідрокеровані щелепи, яке відрізняється тим, що обладнання оснащене додатковим гідроциліндром односторонньої дії, змонтованим у внутрішній порожнині рукояті, щелепи до рукояті прикріплені жорстко, а на їх кінцях шарнірно прикріплені захоплювачі, які за допомогою шарнірно-важільного механізму з'єднані з додатковим гідроциліндром односторонньої дії.
Робоче обладнання для реконструкції трубопроводів
Номер патенту: 40672
Опубліковано: 27.04.2009
Автори: Мелашич Сергій Васильович, Рибалка Катерина Анатоліївна, Сафонов Володимир Васильович, Мелашич Василь Васильович, Діденко Леонід Михайлович
МПК: E02F 3/28
Мітки: реконструкції, робоче, трубопроводів, обладнання
Формула / Реферат:
Робоче обладнання для реконструкції трубопроводів, що містить стрілу, рукоять з гідроциліндрами керування, неповоротну та гідрокеровану щелепи, яке відрізняється тим, що у внутрішній порожнині щелеп в нижній їх частині за допомогою шарнірів ексцентрично закріплені захоплювачі, які з тильного боку оснащені гумовими демпферами.
Робоче обладнання для реконструкції трубопроводів
Номер патенту: 82644
Опубліковано: 12.08.2013
Автори: Клименко Ганна Олександрівна, Мелашич Василь Васильович, Діденко Леонід Михайлович
МПК: E02F 3/28
Мітки: робоче, реконструкції, обладнання, трубопроводів
Формула / Реферат:
Робоче обладнання для реконструкції трубопроводів, що містить стрілу, рукоять, гідрокеровану щелепу, неповоротну щелепу, виконану із окремих ланок, з'єднаних між собою канатом, прикріпленим до механізму його керування, яке відрізняється тим, що неповоротна щелепа оснащена додатковим канатом, який проходить крізь тіло ланок з ексцентриситетом в бік нерухомої щелепи, причому обидва канати з'єднані з механізмом керування.
Робоче обладнання для демонтажу будівельних конструкцій
Номер патенту: 65128
Опубліковано: 25.11.2011
Автори: Мелашич Сергій Васильович, Сафонов Володимир Васильович, Рибалка Катерина Анатоліївна, Мелашич Василь Васильович, Діденко Леонід Михайлович, Семеній Наталія Олександрівна, Шарабідзе Тімур Елгуджайович
МПК: E02F 3/28
Мітки: конструкцій, робоче, демонтажу, обладнання, будівельних
Формула / Реферат:
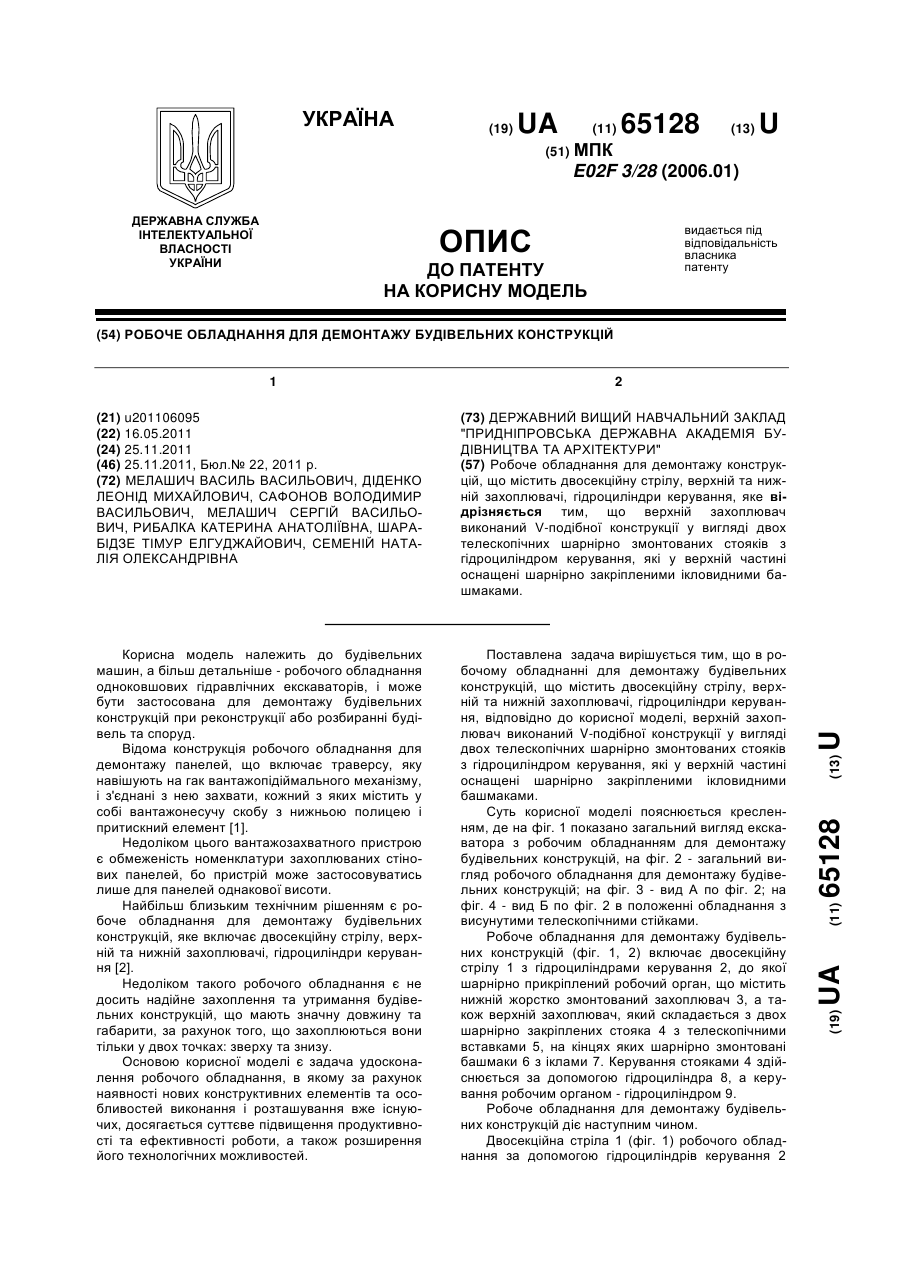
Робоче обладнання для демонтажу конструкцій, що містить двосекційну стрілу, верхній та нижній захоплювачі, гідроциліндри керування, яке відрізняється тим, що верхній захоплювач виконаний V-подібної конструкції у вигляді двох телескопічних шарнірно змонтованих стояків з гідроциліндром керування, які у верхній частині оснащені шарнірно закріпленими ікловидними башмаками.
Робоче обладнання для розбирання споруд

Номер патенту: 66070
Опубліковано: 26.12.2011
Автори: Січко Ігор Миколайович, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: обладнання, розбирання, робоче, споруд
Формула / Реферат:
Робоче обладнання для розбирання споруд, що містить двосекційну стрілу, модуль орієнтації, рукоять та дві гідрокеровані щелепи, яке відрізняється тим, що щелепи додатково оснащені розташованими з протилежних боків важелями, на яких змонтовані гідроциліндри керування щелепами.
Попередній патент: Робоче обладнання для реконструкції трубопроводів
Наступний патент: Композиційний твердий електроліт для твердотільних літієвих акумуляторів
Випадковий патент: Хомут для фіксації пробки флакона при реінфузії крові