Робоче обладнання для реконструкції трубопроводів
Номер патенту: 82644
Опубліковано: 12.08.2013
Автори: Клименко Ганна Олександрівна, Мелашич Василь Васильович, Діденко Леонід Михайлович
Формула / Реферат
Робоче обладнання для реконструкції трубопроводів, що містить стрілу, рукоять, гідрокеровану щелепу, неповоротну щелепу, виконану із окремих ланок, з'єднаних між собою канатом, прикріпленим до механізму його керування, яке відрізняється тим, що неповоротна щелепа оснащена додатковим канатом, який проходить крізь тіло ланок з ексцентриситетом в бік нерухомої щелепи, причому обидва канати з'єднані з механізмом керування.
Текст
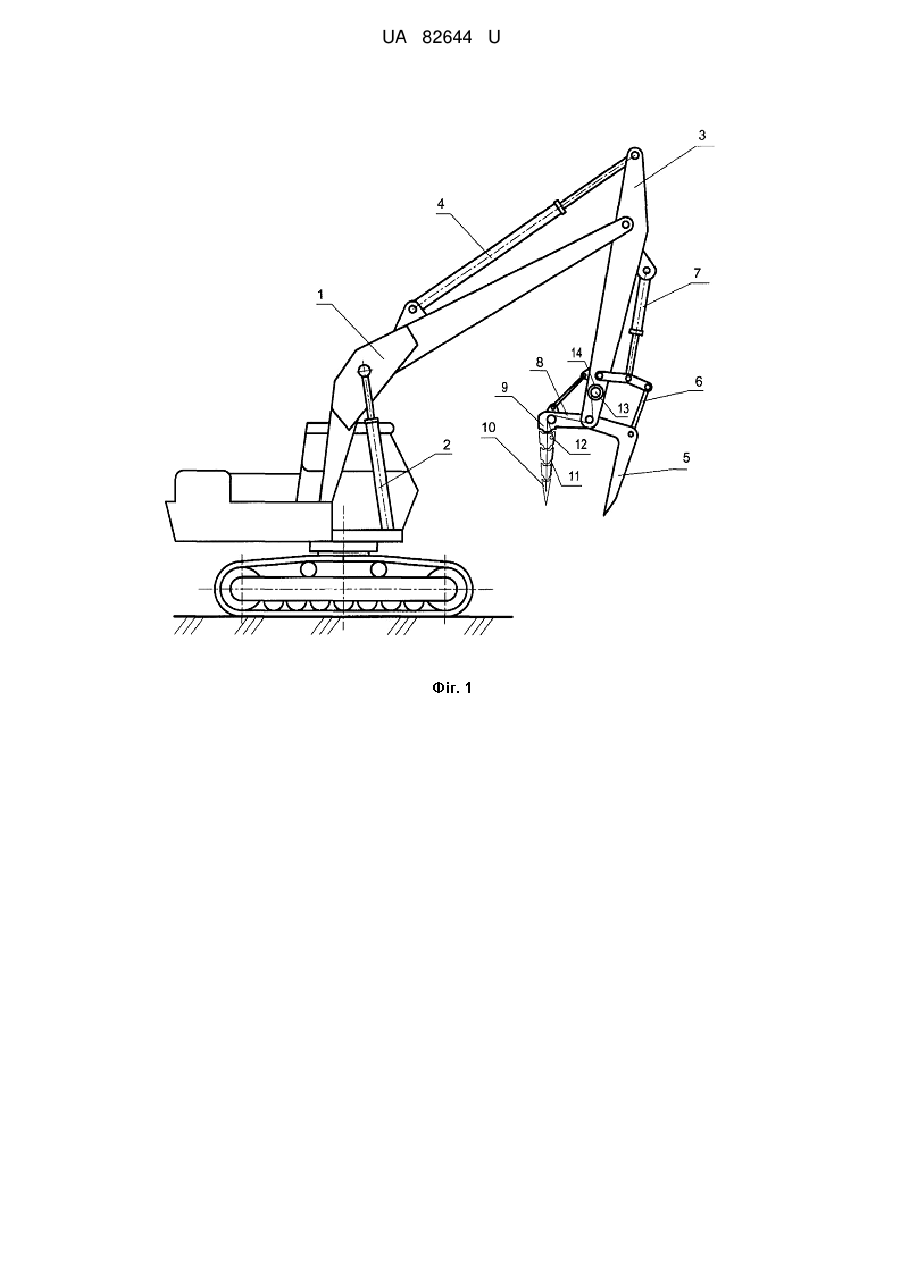
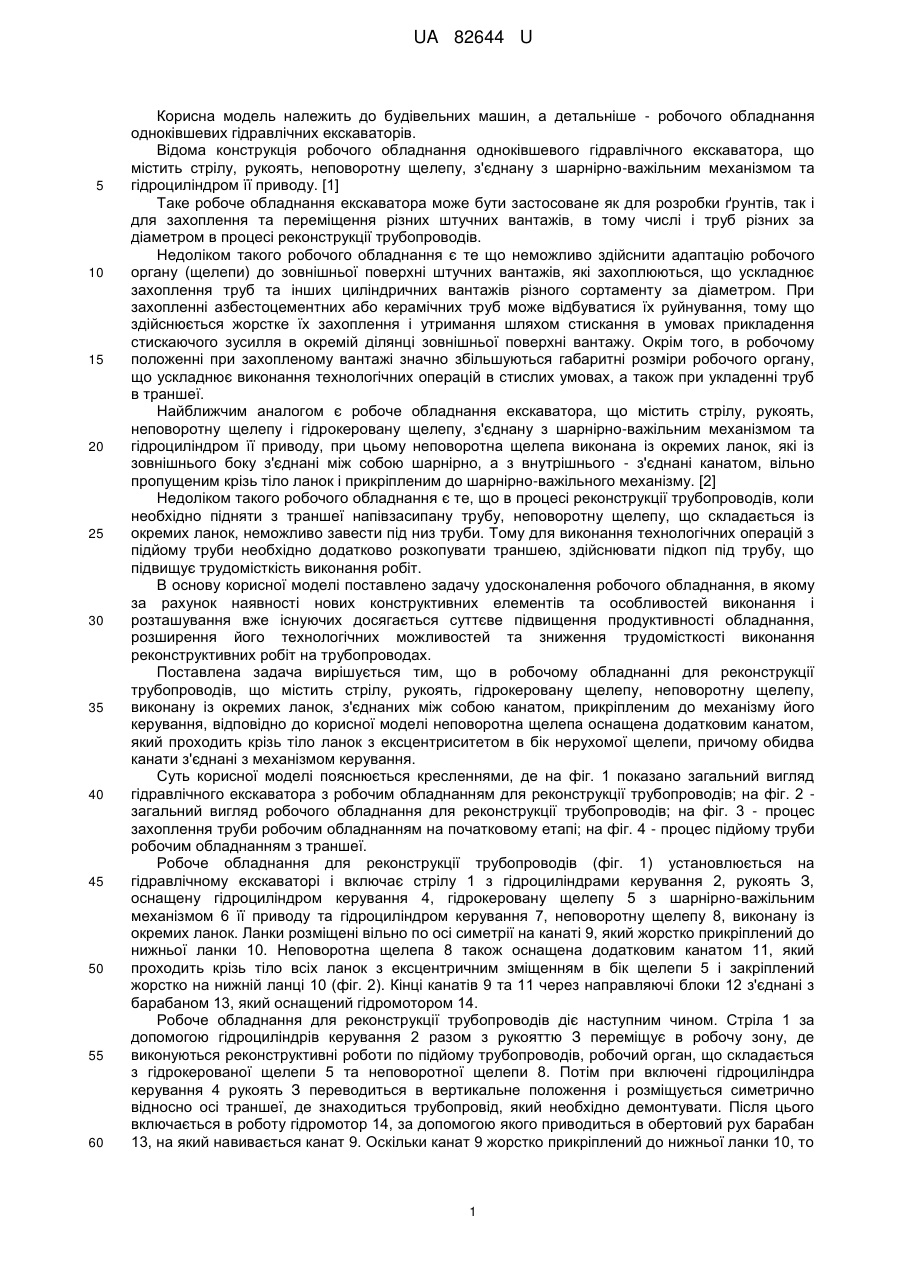
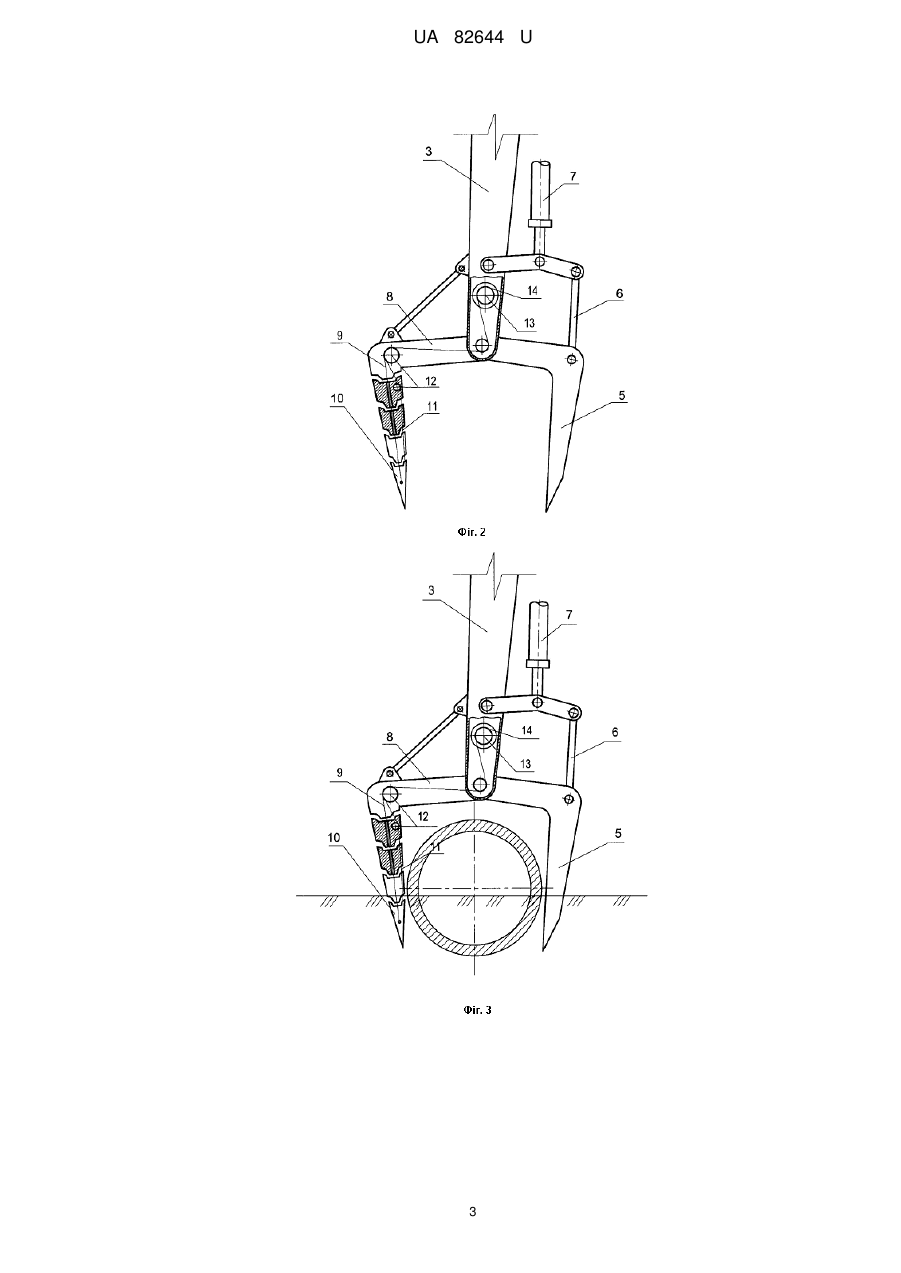
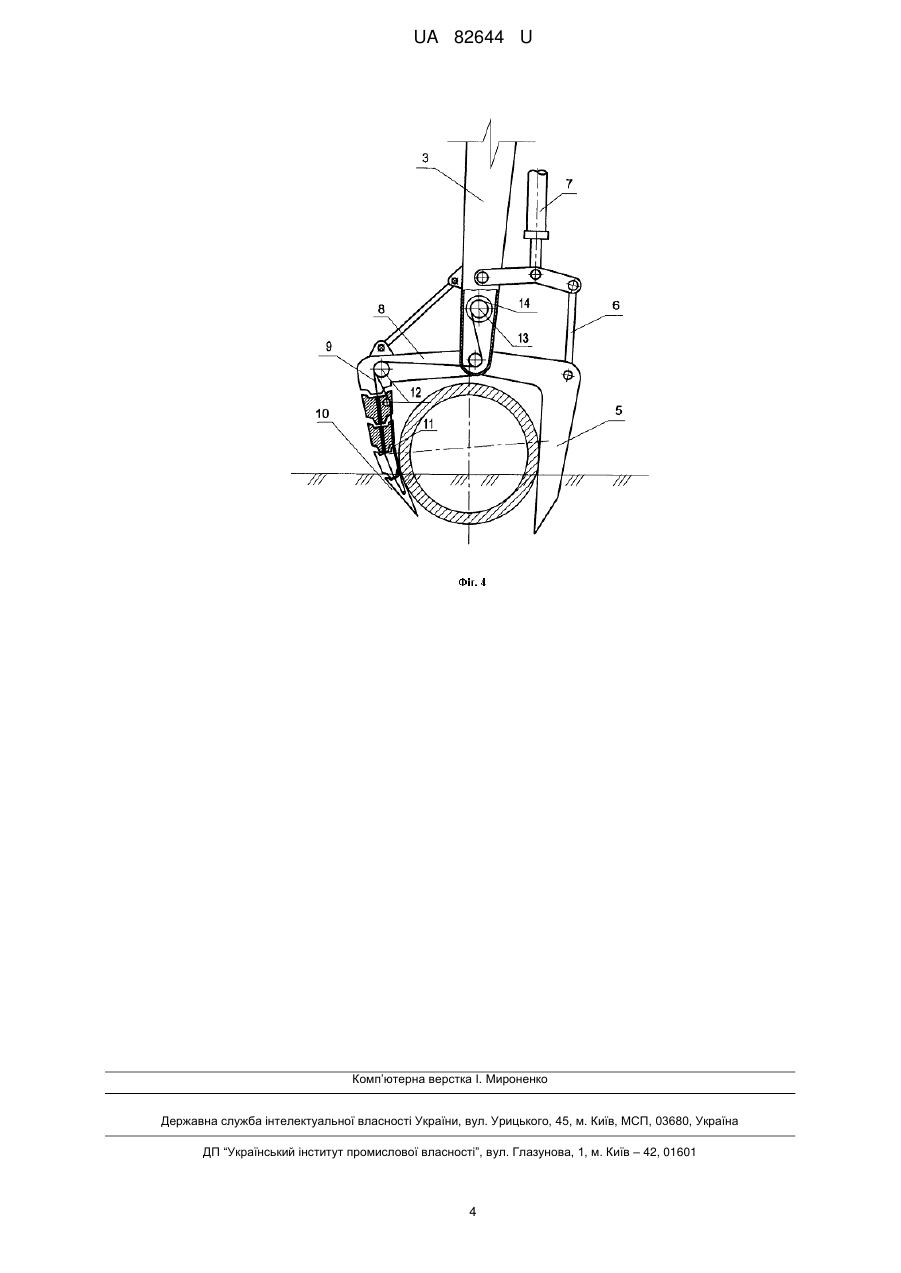
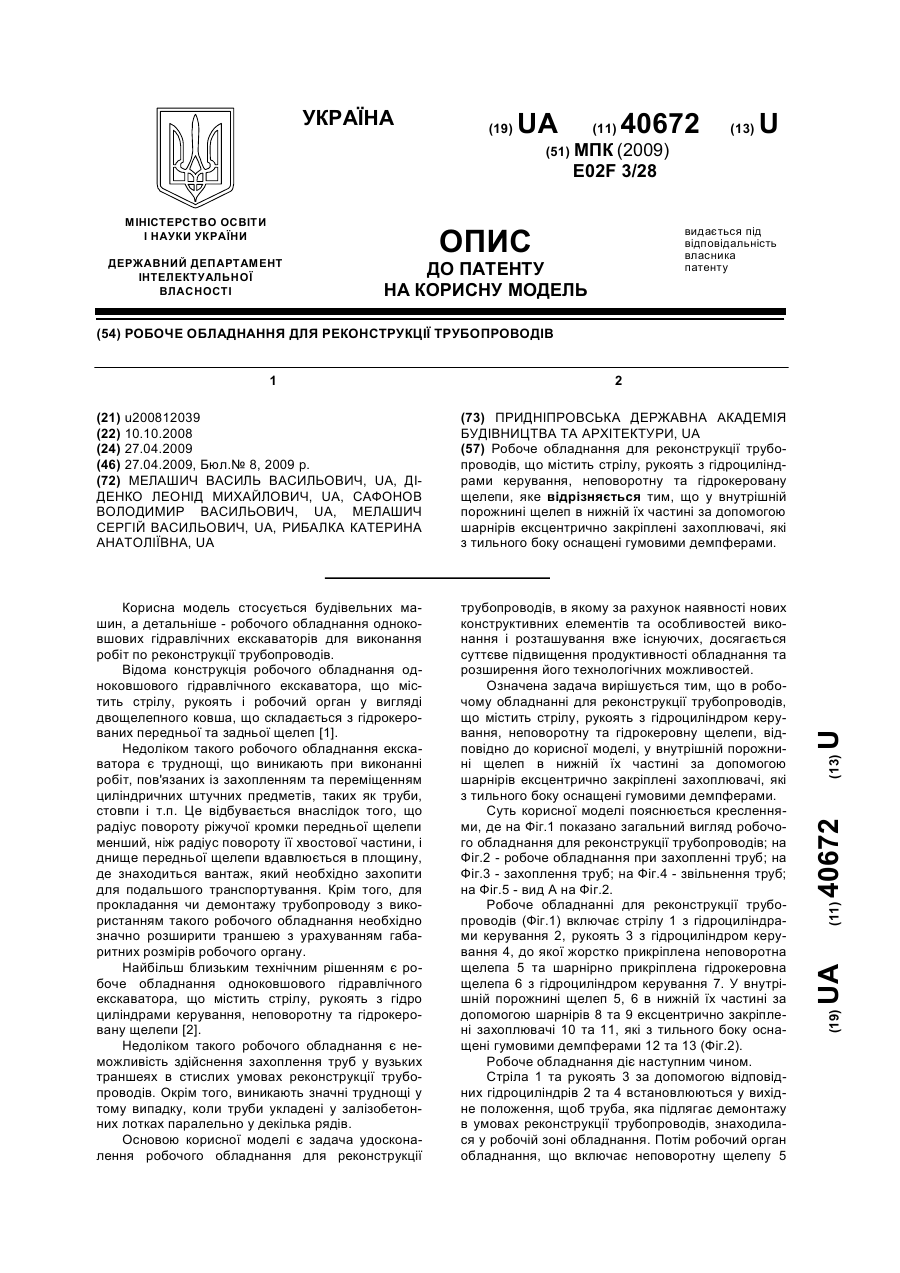
Реферат: Робоче обладнання для реконструкції трубопроводів містить стрілу, рукоять, гідрокеровану щелепу, неповоротну щелепу, окремі ланки неповоротної щелепи, з'єднувальний канат, механізм керування з’єднувальним канатом, додатковий канат. Неповоротна щелепа, виконана із окремих ланок, з’єднаних між собою канатом, оснащена додатковим канатом, який проходить крізь тіло ланок з ексцентриситетом в бік нерухомої щелепи, причому обидва канати з'єднані з механізмом керування. UA 82644 U (12) UA 82644 U UA 82644 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до будівельних машин, а детальніше - робочого обладнання одноківшевих гідравлічних екскаваторів. Відома конструкція робочого обладнання одноківшевого гідравлічного екскаватора, що містить стрілу, рукоять, неповоротну щелепу, з'єднану з шарнірно-важільним механізмом та гідроциліндром її приводу. [1] Таке робоче обладнання екскаватора може бути застосоване як для розробки ґрунтів, так і для захоплення та переміщення різних штучних вантажів, в тому числі і труб різних за діаметром в процесі реконструкції трубопроводів. Недоліком такого робочого обладнання є те що неможливо здійснити адаптацію робочого органу (щелепи) до зовнішньої поверхні штучних вантажів, які захоплюються, що ускладнює захоплення труб та інших циліндричних вантажів різного сортаменту за діаметром. При захопленні азбестоцементних або керамічних труб може відбуватися їх руйнування, тому що здійснюється жорстке їх захоплення і утримання шляхом стискання в умовах прикладення стискаючого зусилля в окремій ділянці зовнішньої поверхні вантажу. Окрім того, в робочому положенні при захопленому вантажі значно збільшуються габаритні розміри робочого органу, що ускладнює виконання технологічних операцій в стислих умовах, а також при укладенні труб в траншеї. Найближчим аналогом є робоче обладнання екскаватора, що містить стрілу, рукоять, неповоротну щелепу і гідрокеровану щелепу, з'єднану з шарнірно-важільним механізмом та гідроциліндром її приводу, при цьому неповоротна щелепа виконана із окремих ланок, які із зовнішнього боку з'єднані між собою шарнірно, а з внутрішнього - з'єднані канатом, вільно пропущеним крізь тіло ланок і прикріпленим до шарнірно-важільного механізму. [2] Недоліком такого робочого обладнання є те, що в процесі реконструкції трубопроводів, коли необхідно підняти з траншеї напівзасипану трубу, неповоротну щелепу, що складається із окремих ланок, неможливо завести під низ труби. Тому для виконання технологічних операцій з підйому труби необхідно додатково розкопувати траншею, здійснювати підкоп під трубу, що підвищує трудомісткість виконання робіт. В основу корисної моделі поставлено задачу удосконалення робочого обладнання, в якому за рахунок наявності нових конструктивних елементів та особливостей виконання і розташування вже існуючих досягається суттєве підвищення продуктивності обладнання, розширення його технологічних можливостей та зниження трудомісткості виконання реконструктивних робіт на трубопроводах. Поставлена задача вирішується тим, що в робочому обладнанні для реконструкції трубопроводів, що містить стрілу, рукоять, гідрокеровану щелепу, неповоротну щелепу, виконану із окремих ланок, з'єднаних між собою канатом, прикріпленим до механізму його керування, відповідно до корисної моделі неповоротна щелепа оснащена додатковим канатом, який проходить крізь тіло ланок з ексцентриситетом в бік нерухомої щелепи, причому обидва канати з'єднані з механізмом керування. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 показано загальний вигляд гідравлічного екскаватора з робочим обладнанням для реконструкції трубопроводів; на фіг. 2 загальний вигляд робочого обладнання для реконструкції трубопроводів; на фіг. 3 - процес захоплення труби робочим обладнанням на початковому етапі; на фіг. 4 - процес підйому труби робочим обладнанням з траншеї. Робоче обладнання для реконструкції трубопроводів (фіг. 1) установлюється на гідравлічному екскаваторі і включає стрілу 1 з гідроциліндрами керування 2, рукоять З, оснащену гідроциліндром керування 4, гідрокеровану щелепу 5 з шарнірно-важільним механізмом 6 її приводу та гідроциліндром керування 7, неповоротну щелепу 8, виконану із окремих ланок. Ланки розміщені вільно по осі симетрії на канаті 9, який жорстко прикріплений до нижньої ланки 10. Неповоротна щелепа 8 також оснащена додатковим канатом 11, який проходить крізь тіло всіх ланок з ексцентричним зміщенням в бік щелепи 5 і закріплений жорстко на нижній ланці 10 (фіг. 2). Кінці канатів 9 та 11 через направляючі блоки 12 з'єднані з барабаном 13, який оснащений гідромотором 14. Робоче обладнання для реконструкції трубопроводів діє наступним чином. Стріла 1 за допомогою гідроциліндрів керування 2 разом з рукояттю З переміщує в робочу зону, де виконуються реконструктивні роботи по підйому трубопроводів, робочий орган, що складається з гідрокерованої щелепи 5 та неповоротної щелепи 8. Потім при включені гідроциліндра керування 4 рукоять З переводиться в вертикальне положення і розміщується симетрично відносно осі траншеї, де знаходиться трубопровід, який необхідно демонтувати. Після цього включається в роботу гідромотор 14, за допомогою якого приводиться в обертовий рух барабан 13, на який навивається канат 9. Оскільки канат 9 жорстко прикріплений до нижньої ланки 10, то 1 UA 82644 U 5 10 15 20 при навиванні його на барабан 13 скорочується його довжина і за рахунок зусилля, яке утворюється в канаті 9 всі ланки притискуються одна до одної своїми торцевими поверхнями, утворюючи жорстку конструкцію. Потім робочий орган у вигляді двощелепного захвату опускається на трубопровід і щелепи 5 та 8 охоплюють його з обох боків і врізуються у ґрунт, де він розташований (фіг. 3). Після цього здійснюється реверсування гідромотора 14, барабан 13 розкручується в протилежному напрямі, канат 9 звивається з барабана 13, а канат 11, навпаки, починає навиватися на барабан 13 і завдяки направляючим блокам 12 передає зусилля на ланки неповоротної щелепи 8. Оскільки канат 11 проходить крізь тіло всіх ланок з ексцентричним зміщенням в бік щелепи 5, то за рахунок зусилля, що створюється в натягнутому канаті 11, ланки приймають криволінійну траєкторію, щелепа 8 набуває жорсткості і охоплює трубопровід, який необхідно демонтувати (фіг. 4). За рахунок гідроциліндра 7 створюється зусилля, яке через шарнірно-важільний механізм 6 передається на щелепу 5, яка притискується з іншого боку до трубопроводу і в такому положенні щелеп 5 та 8 здійснюється демонтаж та підйом трубопроводу. Розроблена конструкція робочого обладнання для реконструкції трубопроводів може бути використана для захоплення, переміщення, демонтажу та укладення труб та інших циліндричних вантажів різних за діаметром. При цьому роботи можуть виконуватися в стислих умовах як самого будівельного майданчика, так і в умовах вузьких та глибоких траншей. Джерела інформації: 1. А. с. 1778245 СРСР, Е 02 F 3/38. Робоче обладнання екскаватора / (СРСР). опубл. 1992. 2. Пат. 18608 Україна, МПК Е 02 F 3/28. Робоче обладнання екскаватора / - № u200605320; заявл. 15.0502006; опубл. 15.11.2006, Бюл. № 11. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 Робоче обладнання для реконструкції трубопроводів, що містить стрілу, рукоять, гідрокеровану щелепу, неповоротну щелепу, виконану із окремих ланок, з'єднаних між собою канатом, прикріпленим до механізму його керування, яке відрізняється тим, що неповоротна щелепа оснащена додатковим канатом, який проходить крізь тіло ланок з ексцентриситетом в бік нерухомої щелепи, причому обидва канати з'єднані з механізмом керування. 2 UA 82644 U 3 UA 82644 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюWork equipment for pipeline reconstruction
Автори англійськоюMelashych Vasyl Vasyliovych, Didenko Leonid Mykhailovych, Klymenko Hanna Oleksandrivna
Назва патенту російськоюРабочее оборудование для реконструкции трубопроводов
Автори російськоюМелашич Василий Васильевич, Диденко Леонид Михайлович, Клименко Анна Александровна
МПК / Мітки
МПК: E02F 3/28
Мітки: реконструкції, робоче, обладнання, трубопроводів
Код посилання
<a href="https://ua.patents.su/6-82644-roboche-obladnannya-dlya-rekonstrukci-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Робоче обладнання для реконструкції трубопроводів</a>
Робоче обладнання для реконструкції трубопроводів
Номер патенту: 40672
Опубліковано: 27.04.2009
Автори: Мелашич Василь Васильович, Сафонов Володимир Васильович, Рибалка Катерина Анатоліївна, Діденко Леонід Михайлович, Мелашич Сергій Васильович
МПК: E02F 3/28
Мітки: обладнання, трубопроводів, робоче, реконструкції
Формула / Реферат:
Робоче обладнання для реконструкції трубопроводів, що містить стрілу, рукоять з гідроциліндрами керування, неповоротну та гідрокеровану щелепи, яке відрізняється тим, що у внутрішній порожнині щелеп в нижній їх частині за допомогою шарнірів ексцентрично закріплені захоплювачі, які з тильного боку оснащені гумовими демпферами.
Робоче обладнання екскаватора
Номер патенту: 18608
Опубліковано: 15.11.2006
Автори: Мелашич Василь Васильович, Семеній Наталія Олександрівна, Сафонов Володимир Васильович, Діденко Леонід Михайлович
МПК: E02F 3/28
Мітки: екскаватора, обладнання, робоче
Формула / Реферат:
Робоче обладнання екскаватора, що містить стрілу, рукоять, неповоротну щелепу і гідрокеровану щелепу, з'єднану з шарнірно-важільним механізмом та гідроциліндром її приводу, яке відрізняється тим, що неповоротна щелепа виконана із окремих ланок, які з зовнішнього боку з'єднані між собою шарнірно, а з внутрішнього - з'єднані канатом, вільно пропущеним крізь тіло ланок і прикріпленим до шарнірно-важільного механізму.
Робоче обладнання

Номер патенту: 47588
Опубліковано: 15.07.2002
Автори: Кулик Ігор Анатолійович, Хмара Леонід Андрійович, Уріх Євген Йосипович, Блехарська Олена Миколаївна, Соколов Ігор Анатолійович
МПК: E02F 3/28
Мітки: робоче, обладнання
Формула / Реферат:
Робоче обладнання, що містить стрілу, рукоять, дві щелепи та гідроциліндри керування стрілою, рукояттю і робочим органом, який відрізняється тим, що він додатково обладнаний двома гідроциліндрами, які керують розкриттям щелеп, крім того, на нижньому кінці рукояті закріплена вставка, у верхній частині якої встановлені гідроциліндри, а середня - шарнірно з'єднана з щелепами.
Робоче обладнання захватного типу
Номер патенту: 40673
Опубліковано: 27.04.2009
Автори: Мелашич Василь Васильович, Краснопьоров Михайло Сергійович, Гончарук Роман Миколаєвич
МПК: E02F 3/28
Мітки: типу, захватного, обладнання, робоче
Формула / Реферат:
Робоче обладнання захватного типу, що містить стрілу, рукоять, неповоротну щелепу і гідрокеровану щелепу, з'єднану з шарнірно-важільним механізмом та гідроциліндром її приводу, яке відрізняється тим, що неповоротна щелепа шарнірно закріплена на рукояті з можливістю її фіксації в необхідному положенні відносно гідрокерованої щелепи і оснащена шарнірно змонтованим упором, що з'єднаний гнучкою тягою з рукояттю.
Робоче обладнання для розбирання споруд

Номер патенту: 66070
Опубліковано: 26.12.2011
Автори: Січко Ігор Миколайович, Мелашич Василь Васильович
МПК: E02F 3/28
Мітки: робоче, споруд, обладнання, розбирання
Формула / Реферат:
Робоче обладнання для розбирання споруд, що містить двосекційну стрілу, модуль орієнтації, рукоять та дві гідрокеровані щелепи, яке відрізняється тим, що щелепи додатково оснащені розташованими з протилежних боків важелями, на яких змонтовані гідроциліндри керування щелепами.
Попередній патент: Інвентарне кріплення стінок траншеї
Наступний патент: Робоче обладнання для демонтажу трубопроводів
Випадковий патент: Кріогенний технологічний пристрій індукційно - динамічного типу