Апарат захисту і контролю руху шахтної біциліндроконічної підйомної установки з мікропроцесорним керуванням
Номер патенту: 83053
Опубліковано: 27.08.2013
Автори: Соломатін Леонід Олександрович, Вівдич Владислав Вікторович, Голобородько Олексій Олександрович, Роменський Володимир Костянтинович, Лавренко Юрій Васильович, Кравців Володимир Іванович, Качура Дмитро Георгійович
Формула / Реферат
Апарат захисту і контролю руху шахтної біциліндроконічної підйомної установки з мікропроцесорним керуванням, виконаної у вигляді забезпеченого приводом біциліндроконічного барабана і двох підйомних судин, зв'язаних між собою за допомогою підйомного каната, що проходить через два копрові блоки та навивається на вищезазначений барабан, і мікропроцесорний блок, що має пристрій візуального виведення інформації, датчик контролю швидкості обертання барабана, що встановлений на валу барабана підйомної установки, який відрізняється тим, що апарат додатково оснащений взаємодіючими з мікропроцесорним блоком датчиком контролю положення першої підйомної судини, встановленим на копровому шківі першої судини, і датчиком контролю положення підйомної судини, встановленим на копровому шківі другої підйомної судини.
Текст
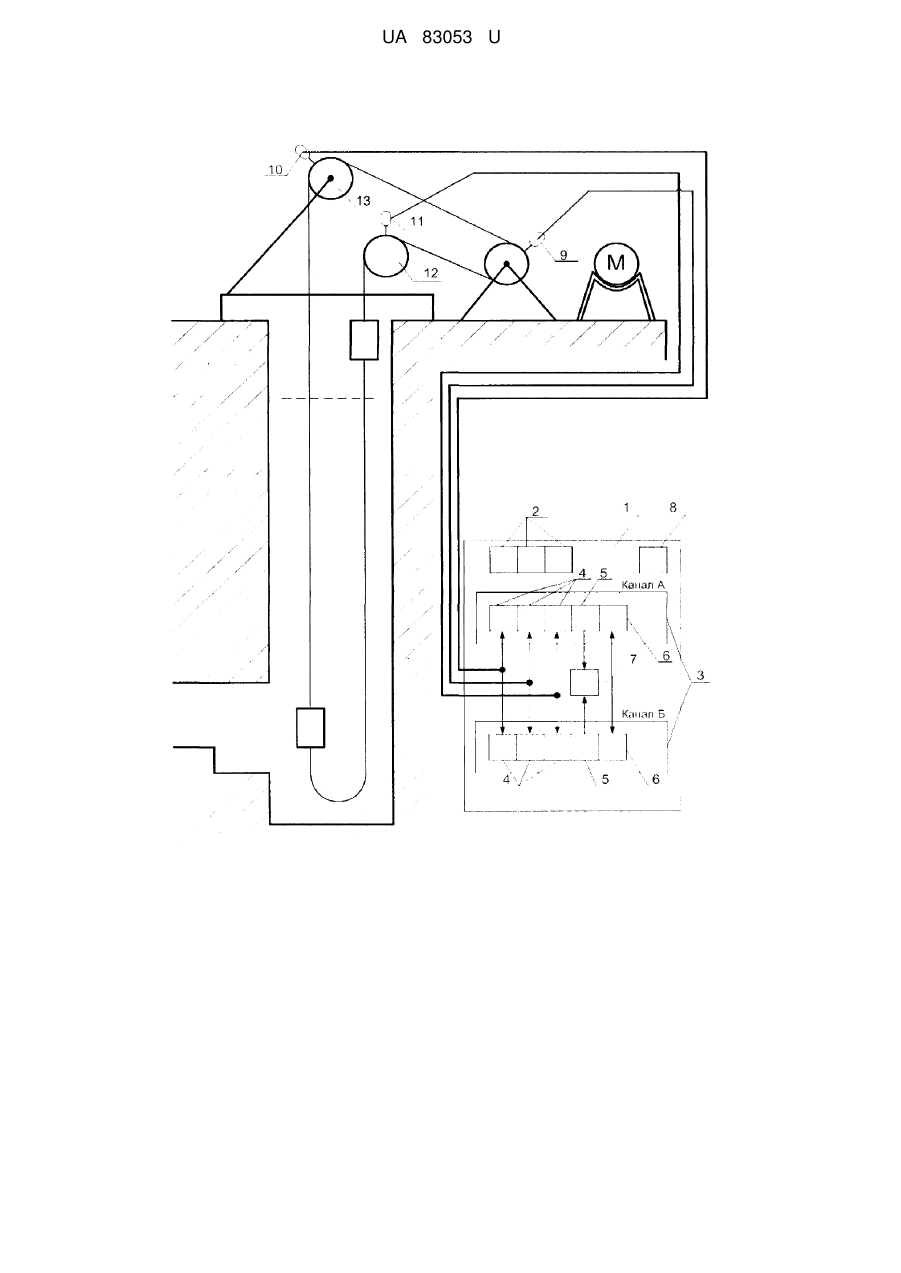
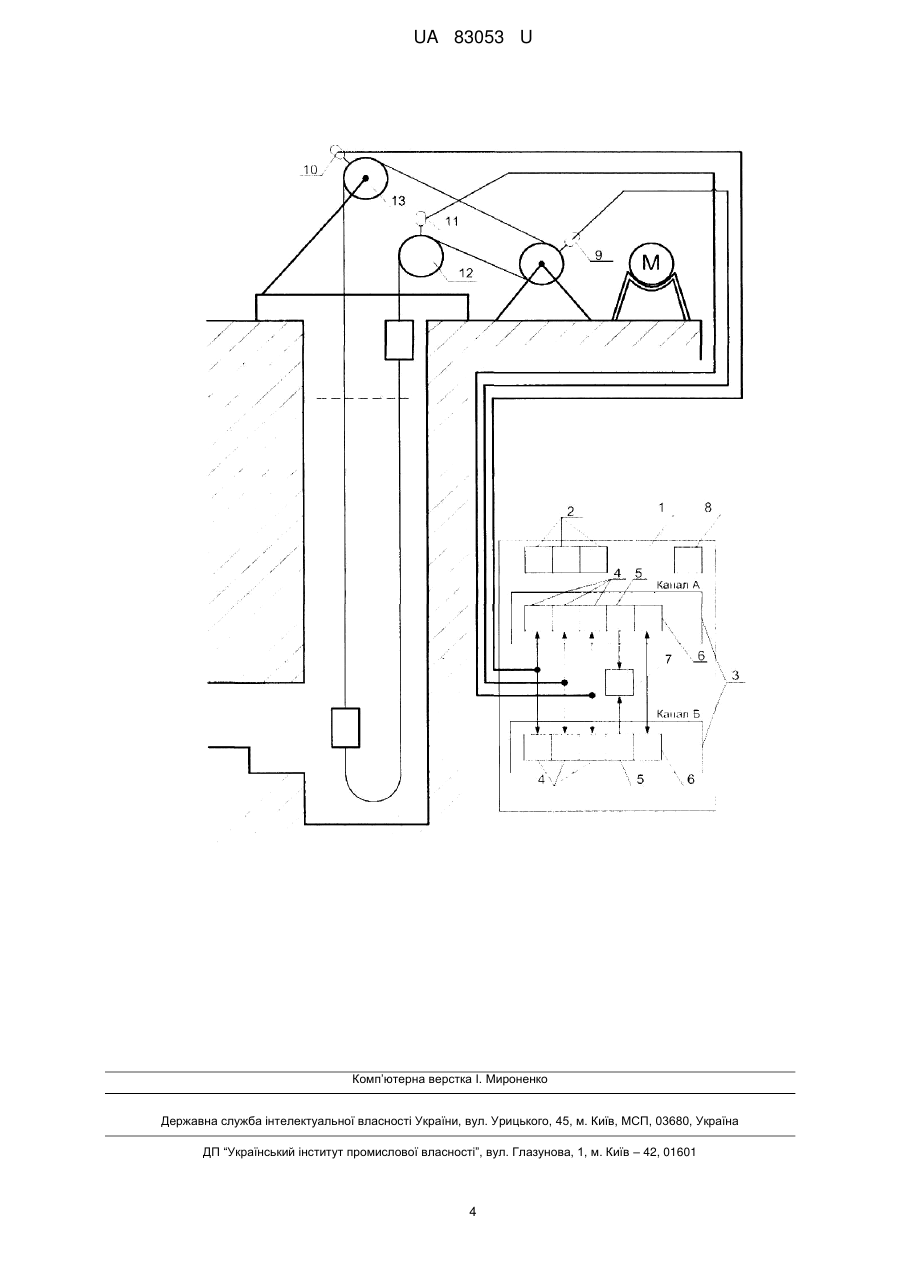
Реферат: Апарат захисту і контролю руху шахтної біциліндроконічної підйомної установки з мікропроцесорним керуванням містить привід біциліндроконічного барабана, дві підйомні судини, підйомний канат, два копрові блоки, мікропроцесорний блок, пристрій візуального виведення інформації, датчик контролю швидкості обертання барабана встановлений на валу барабана підйомної установки. Додатково оснащений датчиком контролю положення першої підйомної судини, встановленим на копровому шківі першої судини, і датчиком контролю положення підйомної судини, встановленим на копровому шківі другої підйомної судини. UA 83053 U (12) UA 83053 U UA 83053 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до гірничої промисловості, і може бути використана в системах керування шахтними підйомними машинах, наприклад у шахтній біциліндроконічній підйомній установці. Для підйому та опускання різних вантажів та людей на копальнях по видобутку вугілля або залізної руди застосовують шахтні підйомні установки (шахтні підйомні машини), що мають різні конструктивні схеми. Тому забезпечення безпечної роботи вищезазначених машин є досить складною і актуальною інженерною задачею. Однією з таких машин є шахтна біциліндроконічна підйомна установка - шахтна підйомна машина, що обладнана барабаном, який складається з трьох частин, жорстко закріплених на валу барабана: з двох кінцевих циліндричних частин, що мають менший діаметр (малі барабани), сполучених за допомогою двох конічних поверхонь з центральною частиною барабана, яка має більший діаметр (великий барабан). Відомий електромеханічний апарат завдання і контролю ходу, наприклад АЗК-1 або АЗК-1.1, що має два незалежні канали контролю, кожен з яких містить електричний датчик положення судини в стовбурі і блок шляхових команд, що взаємодіють з валом підйомної машини з можливістю коректування, а також електричний обмежувач швидкості та покажчик глибини, що виконаний із застосуванням сельсинів (див. наприклад книгу "Элетрооборудование шахтных подъемных машин". Ю.Т. Калашников, В.Ε. Католиков, Г.И. Шпильберг і др. - Μ.: Недра, 1986. С. 21-28, мал. 1.13, 1.14). У вказаному апараті привід датчиків і блока шляхових команд виконаний у вигляді симетричного редуктора з двома однаковими частинами. Редуктор апарата розподіляє обертання від вала підйомної установки до блока шляхових команд, блоків датчиків положення і датчика контролю цілісності кінематичного ланцюга. Недолік відомого апарата при застосуванні його у системах керування шахтної біциліндроконічної підйомної установки - неможливість визначення поточної лінійної швидкості і глибини підйомних судин на ділянках, де відбувається навивання каната на малий барабан і конічну частину барабана шахтної підйомної машини. Апарат АЗК-1 під час роботи з шахтною підйомною машиною з біциліндроконічним барабаном інтерпретує її як шахтну підйомну машину з циліндричним барабаном, при цьому розрахунковий діаметр якого дорівнює більшому діаметру біциліндроконічного барабана машини. З цієї причини на пульті машиніста підйому відображається не лінійна швидкість підйомних судин, а лінійна швидкість більшого барабана підйомної машини з біциліндроконічним барабаном, а сам покажчик глибини видає точні свідчення глибини тільки на ділянці навивки каната на великий циліндричний барабан. Найбільш близьким аналогом до заявленої корисної моделі є апарат захисту і контролю руху шахтної підйомної установки, що має мікропроцесорний блок з пристроєм візуального виведення інформації, датчик контролю положення підйомних судин в стовбурі, який встановлений на валу барабана підйомної машини, датчик контролю положення судин в стовбурі, що встановлений на валу відхиляючого або копрового шківа та датчик швидкості, що встановлений на валу двигуна (дивися наприклад патент України на корисну модель № 32732, МПК В66В 5/00). Заявлений і відомий апарати захисту і контролю руху мають схожі ознаки: мікропроцесорний блок з пристроєм візуального виведення інформації, датчик контролю положення судин, що встановлений на валу підйомної машини. По сукупності істотних ознак вказаний пристрій є найбільш близьким до заявленої корисної моделі і може бути прийнятий за прототип. Але істотним недоліком цього пристрою під час його роботи з шахтною підйомною машиною з біциліндроконічним барабаном є непряме визначення швидкості руху підйомних судин та пройденого ними шляху, та має наступні недоліки: - мікропроцесорний блок апарата завантажений додатковими обчислювальними операціями, що сприяє зниженню швидкодії пристрою; - постійне збільшення погрішності параметрів швидкості переміщення і розрахункового положення вантажопідйомних судин за рахунок витяжки підйомних канатів; - зниження експлуатаційної готовності системи (ускладнена наладка системи у разі перестановки судини на інший горизонт або при корекції витяжки каната). Враховуючи сучасні вимоги до продуктивності підйомних установок (високі швидкості переміщення судин і велика вага вантажів), непрямий розрахунок поточних параметрів руху судин в шахтних стовбурах із змінною погрішністю значно підвищує вірогідність збоїв системи керування шахтної підйомної установки та виникнення аварійних ситуацій, зокрема з ризиком для життя людей. 1 UA 83053 U 5 10 15 20 25 30 35 40 45 50 55 У основу корисної моделі поставлено задачу - підвищити обчислювальну потужність процесорного блока апарата захисту і контролю руху шахтної підйомної установки з біциліндроконічним барабаном, усунути погрішності, що викликані розтягуванням каната і перерахунком радіусу навивки каната, підвищити безпеку і надійність роботи шахтної підйомної установки з біциліндроконічним барабаном шляхом оснащення апарата захисту і контролю руху додатковими датчиками, встановленими на копрових шківах, і за рахунок технічного результату, що полягає в безпосередньому вимірюванні пройденого судиною шляху і швидкості його руху в шахтному стовбурі. Вказаний технічний результат забезпечений тим, що апарат захисту і контролю руху біциліндроконічної шахтної підйомної установки, виконаної у вигляді привідного біциліндроконічного барабана і двох підйомних судин, зв'язаних між собою за допомогою підйомного каната, що проходить через два копрові блоки, навивається на вищезазначений барабан, і мікропроцесорний блок, що має пристрій візуального виведення інформації, датчик контролю швидкості обертання барабана, що встановлений на валу барабана підйомної установки, додатково оснащений датчиком контролю положення першої підйомної судини, встановленим на копровому шківі першої судини, і датчиком контролю положення підйомної судини, встановленим на копровому шківі другої підйомної судини. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляється, та технічним результатом існує. Тільки завдяки тому, що апарат захисту і контролю руху біциліндроконічної шахтної підйомної установки додатково оснащений датчиком контролю положення першої підйомної судини, встановленим на копровому шківі першої судини, і датчиком контролю положення другої підйомної судини, встановленим на копровому шківі другої підйомної судини, забезпечено безпосереднє вимірювання пройденого судиною шляху і швидкості його руху в шахтному стовбурі, зменшена обчислювальна потужність процесорного блока, усунено погрішності, що викликані розтягуванням підйомного каната і перерахунком радіусу навивки підйомного каната на барабан, забезпечено безпечну експлуатацію і високі експлуатаційні характеристики підйомної установки з біциліндроконічним барабаном. Виключення із заявленої сукупності відмітних ознак будь-яких з них не забезпечує заявленого технічного результату. Корисна модель, що заявляється, є промислово застосовною і призначена для використання в системах керування шахтними підйомними установками з біциліндроконічними барабанами. Корисна модель пояснюється кресленням, де наведена структурна схема апарата захисту і контролю руху шахтної підйомної установки з біциліндроконічним барабаном з мікропроцесорним керуванням. Апарат захисту і контролю руху біциліндроконічної підйомної установки з мікропроцесорним керуванням містить мікропроцесорний блок 1, до складу якого входять: - три джерела живлення 2; - двоканальний контролер 3 з модулями рахунку імпульсів 4, модулями введення/виводу дискретних сигналів 5, модулями введення/виводу аналогових сигналів 6; - виконавче реле 7; - панель оператора 8; - імпульсний датчик швидкості 9, що встановлений на валу установки. Імпульсні виходи датчика 9 підключено до модулів рахунку імпульсів 4 (канали А і Б) контролера 3 мікропроцесорного блока 1. До відмінних ознак корисної моделі, що заявляється, належать: - імпульсний датчик положення 11 першої підйомної судини, що встановлений на копровому шківі 12 першої підйомної судини; - імпульсний датчик контролю положення 10 другої підйомної судини, що встановлений на копровому шківі 13 другої підйомної судини. Імпульсні виходи датчиків 10, 11 також підключено до модулів рахунку імпульсів 4 (канали А і Б) контролера 3 мікропроцесорного блока 1 апарата захисту і контролю руху біциліндроконічної підйомної установки з мікропроцесорним керуванням. Апарат захисту і контролю руху біциліндроконічної підйомної установки з мікропроцесорним керуванням працює таким чином. Використовуючи сигнали, що надходять з імпульсного датчика положення 11 першої підйомної судини та імпульсного датчика контролю положення 10 другої підйомної судини, за допомогою модулів рахунку імпульсів 4, контролер 3 визначає положення підйомних судин, 2 UA 83053 U 5 10 15 20 25 30 35 40 обчислює поточну швидкість їх переміщення, яку контролює відносно діаграми переміщення і забезпечує захист від перевищення швидкості і перепіднімання. Використовуючи виміряні за допомогою модулів рахунку імпульсів 4 величини швидкості датчиків 9, 10 і 11, мікропроцесорний блок 1 контролює цілісність кінематичних зв'язків датчиків. За допомогою виконавчих реле 7, що підключені до модулів виведення дискретних сигналів 5 каналу А і каналу Б контролера 3, мікропроцесорного блока 1, апарат захисту і контролю руху шахтної біциліндроконічної підйомної установки з мікропроцесорним керуванням включений ланцюг захисту запобіжного гальма. За допомогою панелі оператора 8, оператор виконує введення параметрів для налагодження (глибина підйому, діаметр барабана, діаметр каната, координати розташування путніх датчиків і так далі), що необхідні для настройки системи управління, введення і запису в пам'ять робочих і захисних діаграм для різних режимів роботи. На панелі оператора 8 виконується індикація повідомлень про спрацьовування захисту або про порушення контрольних функцій. Для підвищення надійності роботи системи управління під час руху судин канал А і канал Б контролера 3 мікропроцесорні блоки 1 взаємно контролюють один одного за допомогою перехресних аналогових сигналів між блоками 6. Канал Б посилає в канал А контрольні сигнали положення підйомної судини, діюче значення швидкості руху, та розрахункове значення швидкості по захисній діаграмі. Канал А виконує порівняння значення параметрів змінних, що прийняті з каналу Б із власними значеннями тих же змінних. Якщо різниця порівнюваних величин виявиться більшою, ніж деяка допустима величина, канал А накладає запобіжне гальмо. Ті ж самі величини змінних у вигляді контрольних аналогових сигналів передаються в канал Б, де також проводиться їх порівняння з величинами каналу А. Таким чином, шляхом безпосереднього вимірювання швидкості і переміщення підйомних судин в шахтному стовбурі забезпечена висока точність контролю роботи шахтної підйомної біциліндроконічної установки і безпека експлуатації шахтних підйомних установок з біциліндроконічними барабанами. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Апарат захисту і контролю руху шахтної біциліндроконічної підйомної установки з мікропроцесорним керуванням, виконаної у вигляді забезпеченого приводом біциліндроконічного барабана і двох підйомних судин, зв'язаних між собою за допомогою підйомного каната, що проходить через два копрові блоки та навивається на вищезазначений барабан, і мікропроцесорний блок, що має пристрій візуального виведення інформації, датчик контролю швидкості обертання барабана, що встановлений на валу барабана підйомної установки, який відрізняється тим, що апарат додатково оснащений взаємодіючими з мікропроцесорним блоком датчиком контролю положення першої підйомної судини, встановленим на копровому шківі першої судини, і датчиком контролю положення підйомної судини, встановленим на копровому шківі другої підйомної судини. 3 UA 83053 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for protection and control of movement of bi-cylindro-conical winder with microprocessor control
Автори англійськоюLavrenko Yurii Vasyliovych, Romenskyi Volodymyr Konstiantynovych, Solomatin Leonid Oleksandrovych, Holoborodko Oleksii Oleksandrovych, Kravtsiv Volodymyr Ivanovych, Vivdych Vladyslav Viktorovych, Kachura Dmytro Heorhiiovych
Назва патенту російськоюАппарат защиты и контроля движения шахтной бицилиндроконической подъемной установки с микропроцессорным управлением
Автори російськоюЛавренко Юрий Васильевич, Роменский Владимир Константинович, Соломатин Леонид Александрович, Голобородько Алексей Александрович, Кравцив Владимир Иванович, Вивдич Владислав Викторович, Качура Дмитрий Георгиевич
МПК / Мітки
МПК: B66B 5/00
Мітки: біциліндроконічної, руху, апарат, контролю, шахтної, керуванням, мікропроцесорним, захисту, підйомної, установки
Код посилання
<a href="https://ua.patents.su/6-83053-aparat-zakhistu-i-kontrolyu-rukhu-shakhtno-bicilindrokonichno-pidjjomno-ustanovki-z-mikroprocesornim-keruvannyam.html" target="_blank" rel="follow" title="База патентів України">Апарат захисту і контролю руху шахтної біциліндроконічної підйомної установки з мікропроцесорним керуванням</a>
Пристрій захисту і контролю руху копальневої підйомної установки
Номер патенту: 32732
Опубліковано: 26.05.2008
Автори: Мельник Юрій Станіславович, Кононенко Олексій Михайлович, Єфремов Дмитро Владиславович, Попов Микола Миколайович, Роменський Володимир Костянтинович, Соломатін Леонід Олександрович
МПК: B66B 5/12
Мітки: захисту, установки, пристрій, копальневої, контролю, підйомної, руху
Формула / Реферат:
1. Пристрій захисту і контролю руху копальневої підйомної установки, що містить мікропроцесорний блок із засобом візуального виведення інформації і сполучені з ним лініями зв’язку датчик контролю положення підйомної посудини в стовбурі, що встановлений на приводному валу підйомного барабана, кінематично зв’язаного з валом електродвигуна, і датчик контролю положення підйомної посудини в стовбурі, що встановлений на валу відхиляючого або...
Спосіб контролю руху сосуду шахтної підйомної установки
Номер патенту: 5146
Опубліковано: 28.12.1994
Автори: Чумакова Людмила Валентинівна, Мусієнко Володимир Дмитрович, Євглевський Станіслав Іванович, Плахотний Петро Іванович, Чаєв Георгій Харитонович, Копилов Володимир Михайлович, Корольов Леонід Іванович, Гавруцький Олександр Юхимович
Мітки: установки, спосіб, руху, підйомної, контролю, шахтної, сосуду
Формула / Реферат:
Способ контроля движения сосуда шахтной подъемной установки, заключающийся в непрерывном измерении величины отклонения направляющих в шахте на пути движения сосуда и сравнении с заданной допустимой величиной, отличающийся тем, что, с целью повышения точности контроля, задают число допустимых отклонений, непрерывно измеряют величину местоположения сосуда, задают установочную величину, сравнивают с измеренной величиной отклонения...
Спосіб орієнтування наземної шахтної підйомної установки

Номер патенту: 19534
Опубліковано: 15.12.2006
Автори: Бєженцев Володимир Ілліч, Кисельов Микола Миколайович, Філатов Валерій Федорович
МПК: E21D 1/00
Мітки: орієнтування, підйомної, наземної, шахтної, спосіб, установки
Формула / Реферат:
Спосіб орієнтування наземної шахтної підйомної установки, що включає формування умовної базової вертикальної площини відносно барабана підйомної машини, який відрізняється тим, що формування умовної базової вертикальної площини здійснюють візуванням від центра підйому на підшківному майданчику на центр підйомної машини, при цьому площина розміщується і проходить через центр підйому і центр підйомної машини в машинному залі; формують в...
Підвісний пристрій шахтної підйомної установки
Номер патенту: 72150
Опубліковано: 10.08.2012
Автори: Нестеров Артем Павлович, Осипова Тетяна Миколаївна
МПК: B66B 7/00
Мітки: підйомної, шахтної, установки, підвісний, пристрій
Формула / Реферат:
1. Підвісний пристрій шахтної підйомної установки, що містить підвіску, обладнану гасителем коливань, один кінець якої шарнірно з'єднаний з канатним ковшем, а другий з підйомною посудиною, який відрізняється тим, що гаситель коливань виконано у вигляді пружного клина, підпружиненого за допомогою комплекту з щонайменше двох пружних гумометалевих елементів, причому один кінець пружного клина утворює скобу, підвішену на штифті, який забезпечує...
Тренажер оператора шахтної підйомної установки
Номер патенту: 54207
Опубліковано: 17.02.2003
Автори: Толошний Сергій Іванович, Пристром Володимир Адольфович, Коваль Анатолій Миколайович, Морозов Вячеслав Андрійович
Мітки: установки, підйомної, оператора, шахтної, тренажер
Формула / Реферат:
1. Тренажер оператора шахтної підйомної установки, що має пульт оператора з блоком відображення технологічної інформації, перша група виходів і входів якого з'єднана з першими входами і виходами блока моделювання підйомної установки, пульт інструктора, з'єднаний з відповідними входами-виходами згаданого блока моделювання, і блок оперативної пам'яті в складі блока моделювання, який відрізняється тим, що має блок довготермінової пам'яті і блок...
Попередній патент: Комплект для відпочинку
Наступний патент: Спосіб автоматичного управління пастеризацією шампанського
Випадковий патент: Викопувальний орган коренезбиральної машини