Система управління орієнтацією космічного апарата, стабілізованого обертанням
Номер патенту: 83380
Опубліковано: 10.09.2013
Автори: Андрущенко Тетяна Миколаївна, Красножон Олександра Володимирівна, Субота Анатолій Максимович
Формула / Реферат
Система управління орієнтацією космічного апарата, стабілізованого обертанням, що містить у своєму складі магнітометр, датчик Сонця, обчислювальні пристрої, яка відрізняється тим, що введено задатчик, вихід якого з'єднаний з першим входом першого порівняльного пристрою, другий вхід якого з'єднаний з першим виходом другого обчислювального пристрою, а вихід з'єднаний з першим входом першого обчислювального пристрою, перший вихід якого з'єднаний з входом першого підсилювача потужності, вихід якого через перший магнітний виконавчий орган з'єднаний з першим входом космічного апарата, другий вихід першого обчислювального пристрою через послідовно з'єднані другий підсилювач потужності з другим магнітним виконавчим органом з'єднаний з другим входом космічного апарата, вихід другого задатчика з'єднаний з першим входом другого порівнювального пристрою, другий вхід якого з'єднаний з другим виходом другого обчислювального пристрою, перший вихід якого з'єднаний з другим входом першого порівняльного пристрою, датчик Сонця з'єднаний з першим, а вихід магнітометра з'єднаний з другим входом другого обчислювального пристрою, самі входи датчика Сонця і магнітометра з'єднані з виходом космічного апарата.
Текст
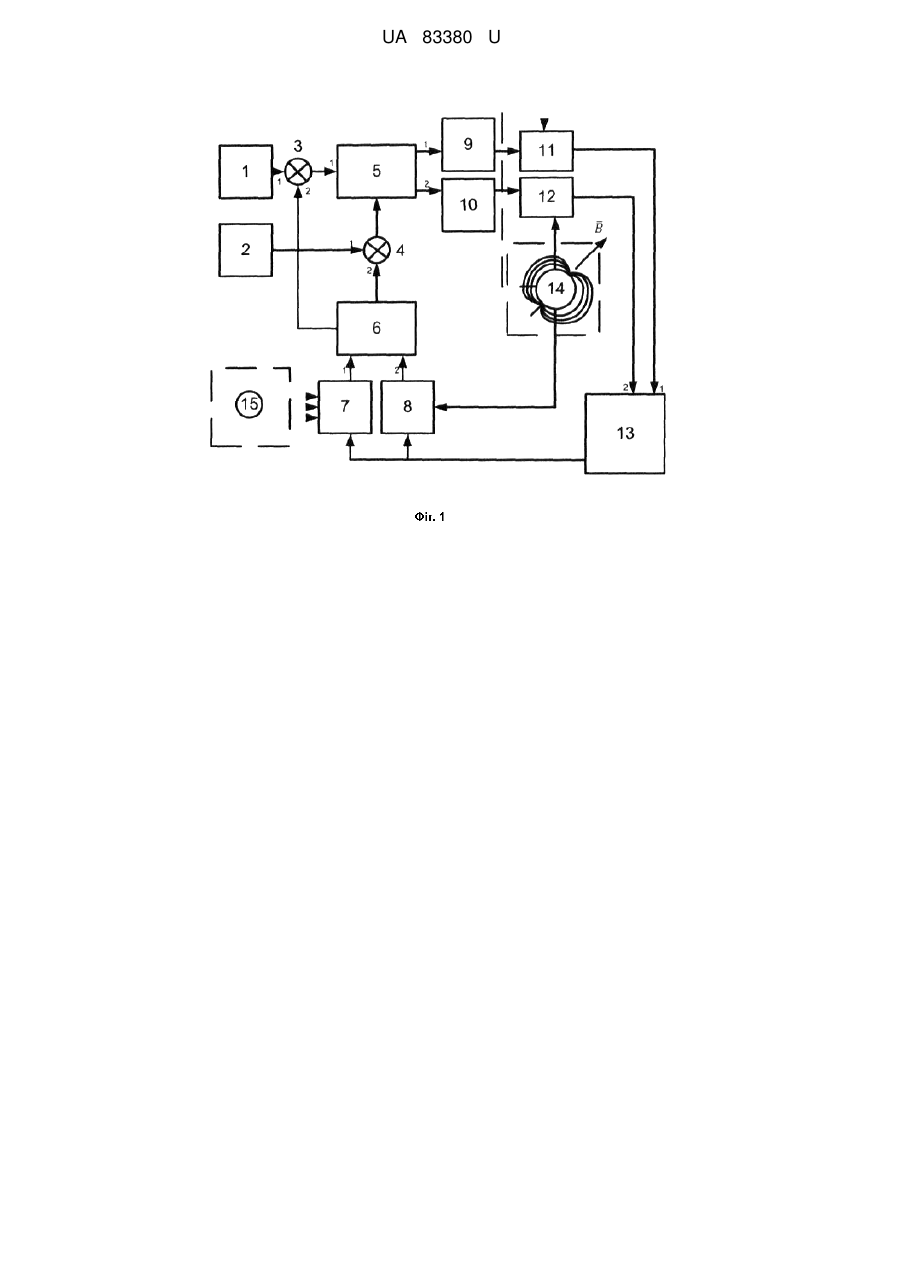
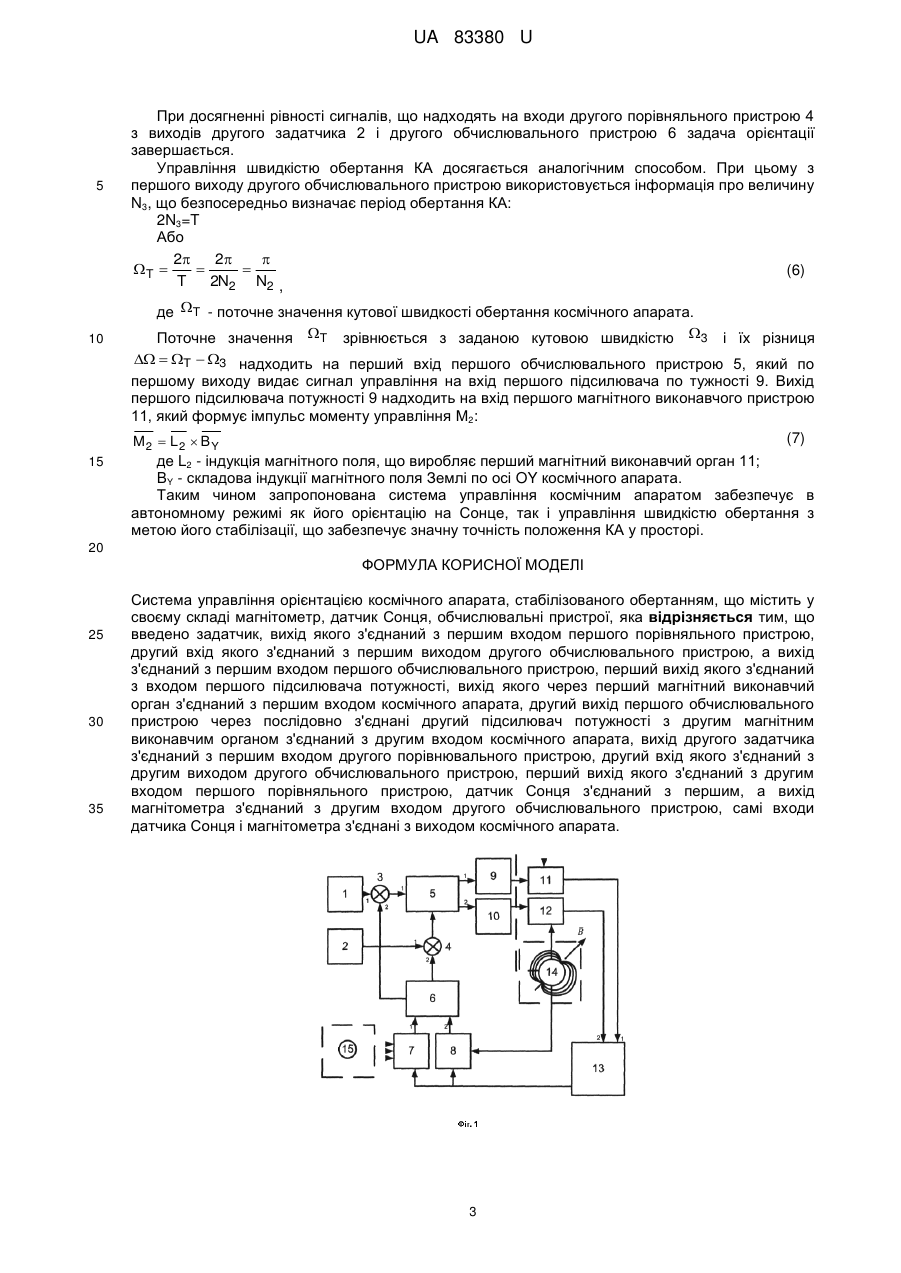
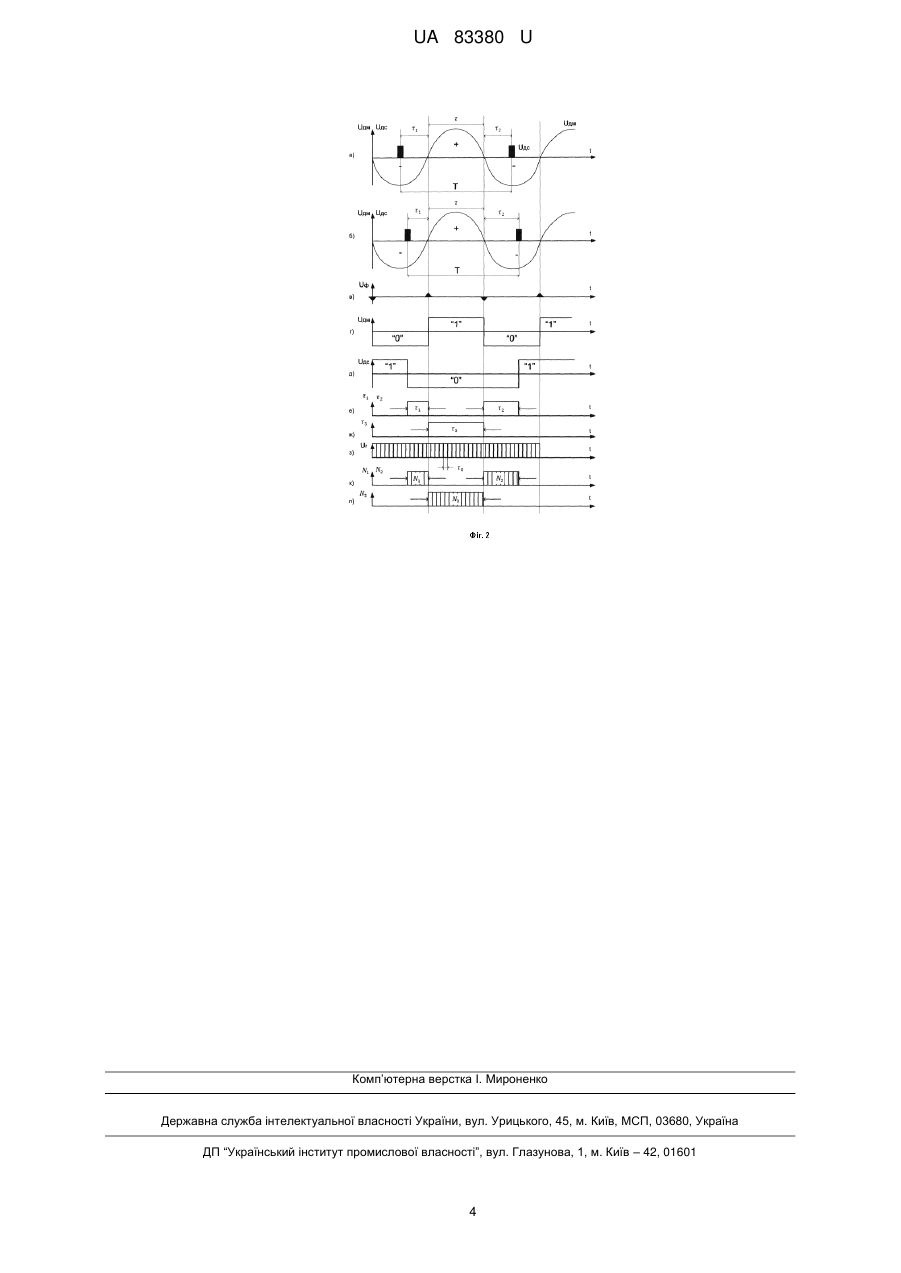
Реферат: Система управління орієнтацією космічного апарата, стабілізованого обертанням, містить у своєму складі магнітометр, датчик Сонця, обчислювальні пристрої. Введено задатчик, вихід якого з'єднаний з першим входом першого порівняльного пристрою, другий вхід якого з'єднаний з першим виходом другого обчислювального пристрою, а вихід з'єднаний з першим входом першого обчислювального пристрою, перший вихід якого з'єднаний з входом першого підсилювача потужності, вихід якого через перший магнітний виконавчий орган з'єднаний з першим входом космічного апарата, другий вихід першого обчислювального пристрою через послідовно з'єднані другий підсилювач потужності з другим магнітним виконавчим органом з'єднаний з другим входом космічного апарата, вихід другого задатчика з'єднаний з першим входом другого порівнювального пристрою, другий вхід якого з'єднаний з другим виходом другого обчислювального пристрою, перший вихід якого з'єднаний з другим входом першого порівняльного пристрою, датчик Сонця з'єднаний з першим, а вихід магнітометра з'єднаний з другим входом другого обчислювального пристрою, самі входи датчика Сонця і магнітометра з'єднані з виходом космічного апарата. UA 83380 U (12) UA 83380 U UA 83380 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель може бути використана для орієнтації комічного апарата (КА) на Сонце та стабілізації швидкості його обертання при стабілізації космічного апарата за рахунок власного обертання навколо однієї з осей, зв'язаної з КА системи координат. Відома магнітна система орієнтації і стабілізації КА [Разіграев А.П. Основы управления полетом космических аппаратов. Учебн. пособие для втузов.-2-е изд. перераб. и доп. - М.: Машиностроение, 1990.-480 с, рис. 4.30, стор. 167] До складу такої системи входить магнітометричний датчик орієнтації (магнітометр), обчислювальний пристрій та магнітні виконавчі органи. До недоліків такої системи належить низька точність орієнтації космічного апарата у просторі. Відомий спосіб визначення сигналів кутової орієнтації літального апарата з використанням сигналів супутникової навігаційної системи, магнітометра [Патент № 67704, Україна, МПК G01C 21/08. Опубл. 12.03.2012, Бюл. № 5]. Недоліком такого способу є необхідність побудови системи орієнтації космічного апарата з використанням сигналів супутників, що призводить до необхідності залежності від доступу до глобальних супутникових систем GPS або ГЛОНАСС і не дозволяє бути системі орієнтації суттєво автономною. Відома система управління положенням космічного апарата у просторі, що побудована на базі датчиків сонця та зірок [United States Patent, № 4618259, Oct. 21, 1986, G01B 11/26, G01C 1/00]. До складу такої системи входить, окрім датчиків сонця і зірок, перетворювачі сигналів датчиків, комутатори та пристрої контролю. Недоліком такої системи є наявність оптичних датчиків зірок, що потребує для їх працездатності наявність складної оптоелектронної системи, що в свою чергу займає великий об'єм і має значну масу. Це перешкоджає використанню таких систем на малогабаритних супутниках. Відома вимірювальна система для визначення положення у просторі супутника, стабілізованого обертанням [United States Patent, № 3899928, Aug. 19, 1975, G01C 21/00], яка вибрана як прототип, у своєму складі містить магнітометр, датчик Сонця, генератор тактової частоти, обчислювальні пристрої, пристрої передачі телеметричної інформації на Землю. Недоліком такої системи є неможливість автономно на борту супутника вирішувати задачі орієнтації та стабілізації положення супутника у просторі, а також управління кутовою швидкістю обертання супутника. Для вирішення вказаних задач сигнали управління необхідно виробити на Землі на базі інформації, переданої з борта супутника по телеметричному каналу, і передати на борт супутника, що загалом ускладнює систему. Задачею корисної моделі є утворення автономної системи орієнтації супутника у просторі та управління кутовою швидкістю обертання з метою його стабілізації на базі інформації датчиків Сонця і магнітометра. Поставлена задача вирішується тим, що в систему управління орієнтацією космічного апарата, стабілізованого обертанням, що містить у своєму складі магнітометр, датчик Сонця, обчислювальні пристрої, згідно з корисною моделлю, введено задатчик, вихід якого з'єднаний з першим входом першого порівняльного пристрою, другий вхід якого з'єднаний з першим виходом другого обчислювального пристрою, а вихід з'єднаний з першим входом першого обчислювального пристрою, перший вихід якого з'єднаний з входом першого підсилювача потужності, вихід якого через перший магнітний виконавчий орган з'єднаний з першим входом космічного апарата, другий вихід першого обчислювального пристрою через послідовно з'єднані другого підсилювача потужності з другим магнітним виконавчим органом з'єднаний з другим входом космічного апарата, вихід другого задатчика з'єднаний з першим входом другого порівнювального пристрою, другий вхід якого з'єднаний з другим виходом другого обчислювального пристрою, перший вихід якого з'єднаний з другим входом першого порівняльного пристрою, датчик Сонця з'єднаний з першим, а вихід магнітометра з'єднаний з другим входом другого обчислювального пристрою, самі входи датчика Сонця і магнітометра з'єднані з виходом космічного апарата. На Фіг. 1 зображена загальна функціональна схема системи управління орієнтацією космічного апарата стабілізованого обертанням. На Фіг. 2 зображені осцилограми що пояснюють принцип обробки вихідної інформації датчиків Сонця і магнітометра. Система управління орієнтацією космічного апарата, стабілізованого обертанням, у своєму складі містить перший 1 і другий 2 задатчики, перший 3 і другий 4 порівняльні пристрої, перший 5 і другий 6 обчислювальні пристрої, датчик Сонця 7, магнітометр 8, перший 9 і другий 10 1 UA 83380 U 5 10 15 20 25 30 35 підсилювачі потужності, перший 11 і другий 12 магнітні виконавчі органи, космічний апарат 13. (Магнітне поле Землі 14 і Сонце 15 показані умовно). Вихід першого задатчика 1 з'єднаний з першим входом першого порівняльного пристрою 3, другий вхід якого з'єднаний з першим виходом другого обчислювального пристрою 6, а вихід з'єднаний з першим входом першого обчислювального пристрою 5. Перший вихід обчислювального пристрою 5 з'єднаний з входом першого підсилювача потужності 9, вихід якого через перший магнітний виконавчий орган 11 з'єднаний з першим входом космічного апарата 13. Другий вихід першого обчислювального пристрою 5 через послідовно з'єднані другий підсилювач потужності 10 і другий магнітний виконавчий орган 12 з'єднаний з другим входом космічного апарата 13. Вихід другого задатчика 2 з'єднаний з першим входом другого порівняльного пристрою 4, другий вхід якого з'єднаний з виходом другого обчислювального пристрою 6, перший вихід якого з'єднаний з другим входом першого порівняльного пристрою 3. Вихід датчика Сонця 7 з'єднаний з першим входом, а вихід магнітометра 8 з'єднаний з другим входом другого обчислювального пристрою 6. Входи датчика Сонця 7 і магнітометра 8 з'єднані з виходом космічного апарата 13. Принцип дії системи управління орієнтацією космічного апарата, стабілізованого обертанням, полягає в наступному. З початку розглянемо питання здобуття і методику обробки інформації, що надходить з датчиків Сонця 7 і магнітометра 8. Дане питання вирішено за допомогою осцилограм, приведених на фіг. 2. На фіг. 2,а приведені вихідні сигнали датчиків Сонця (UДС) і магнітометра (UДМ) при умові, що одна з осей космічного апарата (КА) співпадає з напрямом на Сонце, а сам КА обертається навколо іншої осі зв'язаної з КА системи координат з періодом Т. Такому положенню КА відповідає рівність: T (1) 1 2 2 , 1 2 При інших умовах (див. фіг, 2,б) (2) 1 2 Нерівність σ1 і σ2 потребує вироблення інформації про їх різницю, що досягається перетворенням часових інтервалів σ1, σ2, σ цифрову форму з метою подальшої їх обробки у другому обчислювальному пристрої в (фіг. 1). Методика перетворення часових інтервалів σ1, σ2, σ відображена на фіг. 2,б-2,л і полягає у заповненні часових інтервалів високочастотними імпульсами з періодом σ 0 їх слідкування. Таким чином у лічильниках обчислювального пристрою 6, що входять до його складу формуються цифрові еквіваленти σ1, σ2, σ. 1 N1 2 N2 N3 (3) 0 0 0 ; ; . Далі на базі здобутих значень (3) виробляється у обчислювальному пристрої 6 інформація про розбіжність величин σ1 і σ2 (N1 і N2): N2 N1 N1 N2 N1 ; N2 N1 N1 N2 N1 або N3 N1 N2 N3 N3 N1 N2 ; (4) N3 N1 N2 N3 N3 N1 N2 . На базі (4) у другому обчислювальному пристрої 6 виробляється як величина, так і знак 40 45 розбіжності величин σ1 і σ2 (N1 і N2). Величина розбіжності Ni , i 1,2 порівнюється з вихідним сигналом другого задатчика 2, що задає необхідну інформацію про потрібну орієнтацію КА. На базі цієї інформації перший обчислювальний пристрій 5 виробляє, у відповідності до закладеного закону управління, сигнал управління, що надходить на вхід другого підсилювача потужності 10. З виходу другого підсилювача потужності 10 сигнал подається на другий виконавчий орган 12, котрий виробляє сигнал управління положенням КА у відповідності до формули M1 L1 B X , де М1 - момент управління; L1 - індукція магнітного поля, що виробляє другий магнітний виконавчий орган 12; B X - складова індукції магнітного поля Землі по осі ОХ КА. 2 (5) UA 83380 U 5 10 15 При досягненні рівності сигналів, що надходять на входи другого порівняльного пристрою 4 з виходів другого задатчика 2 і другого обчислювального пристрою 6 задача орієнтації завершається. Управління швидкістю обертання КА досягається аналогічним способом. При цьому з першого виходу другого обчислювального пристрою використовується інформація про величину N3, що безпосередньо визначає період обертання КА: 2N3=T Або 2 2 T (6) T 2N2 N2 , де T - поточне значення кутової швидкості обертання космічного апарата. Поточне значення T зрівнюється з заданою кутовою швидкістю 3 і їх різниця Т 3 надходить на перший вхід першого обчислювального пристрою 5, який по першому виходу видає сигнал управління на вхід першого підсилювача по тужності 9. Вихід першого підсилювача потужності 9 надходить на вхід першого магнітного виконавчого пристрою 11, який формує імпульс моменту управління М2: (7) M2 L 2 B Y де L2 - індукція магнітного поля, що виробляє перший магнітний виконавчий орган 11; BY - складова індукції магнітного поля Землі по осі OY космічного апарата. Таким чином запропонована система управління космічним апаратом забезпечує в автономному режимі як його орієнтацію на Сонце, так і управління швидкістю обертання з метою його стабілізації, що забезпечує значну точність положення КА у просторі. 20 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Система управління орієнтацією космічного апарата, стабілізованого обертанням, що містить у своєму складі магнітометр, датчик Сонця, обчислювальні пристрої, яка відрізняється тим, що введено задатчик, вихід якого з'єднаний з першим входом першого порівняльного пристрою, другий вхід якого з'єднаний з першим виходом другого обчислювального пристрою, а вихід з'єднаний з першим входом першого обчислювального пристрою, перший вихід якого з'єднаний з входом першого підсилювача потужності, вихід якого через перший магнітний виконавчий орган з'єднаний з першим входом космічного апарата, другий вихід першого обчислювального пристрою через послідовно з'єднані другий підсилювач потужності з другим магнітним виконавчим органом з'єднаний з другим входом космічного апарата, вихід другого задатчика з'єднаний з першим входом другого порівнювального пристрою, другий вхід якого з'єднаний з другим виходом другого обчислювального пристрою, перший вихід якого з'єднаний з другим входом першого порівняльного пристрою, датчик Сонця з'єднаний з першим, а вихід магнітометра з'єднаний з другим входом другого обчислювального пристрою, самі входи датчика Сонця і магнітометра з'єднані з виходом космічного апарата. 3 UA 83380 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюSubota Anatolii Maksymovych
Автори російськоюСуббота Анатолий Максимович
МПК / Мітки
МПК: G01C 21/00
Мітки: орієнтацією, обертанням, система, космічного, стабілізованого, апарата, управління
Код посилання
<a href="https://ua.patents.su/6-83380-sistema-upravlinnya-oriehntaciehyu-kosmichnogo-aparata-stabilizovanogo-obertannyam.html" target="_blank" rel="follow" title="База патентів України">Система управління орієнтацією космічного апарата, стабілізованого обертанням</a>
Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Гавриленко Олег Іванович, Мирна Олена Володимирівна, Лученко Олег Олексійович, Пархоменко Юлія Анатоліївна
МПК: B64G 1/28
Мітки: відмовостійкого, управління, спосіб, орієнтацією, активного, апарата, космічного
Формула / Реферат:
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що...
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Колесников Геннадій Викторович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: кутових, апарата, швидкостей, система, літального, космічного, демпфірування
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Адаптивна система стабілізації космічного літального апарата

Номер патенту: 46189
Опубліковано: 10.12.2009
Автори: Демидова Вікторія Олександрівна, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: апарата, система, космічного, стабілізації, адаптивна, літального
Формула / Реферат:
Адаптивна система стабілізації космічного літального апарата, яка містить датчик кута, вихід якого з'єднаний з першим входом блока керування, датчик кутової швидкості, вихід якого з'єднаний з другим входом блока керування, вихід блока керування через блок підсилювачів потужності з'єднаний з релейним виконавчим органом, яка відрізняється тим, що в неї введений блок визначення мінімального керуючого імпульсу, вхід якого з'єднаний з виходом...
Пристрій для визначення відносної кутової швидкості при коливальному процесі управління орієнтацією космічного апарата
Номер патенту: 10788
Опубліковано: 25.12.1996
Автори: Павловський Михайло Антонович, Карпачов Юрій Андрійович, Анупрієнко Генадій Єфремович
МПК: B64G 1/24
Мітки: відносної, пристрій, апарата, швидкості, орієнтацією, управління, процесі, коливальному, визначення, космічного, кутової
Формула / Реферат:
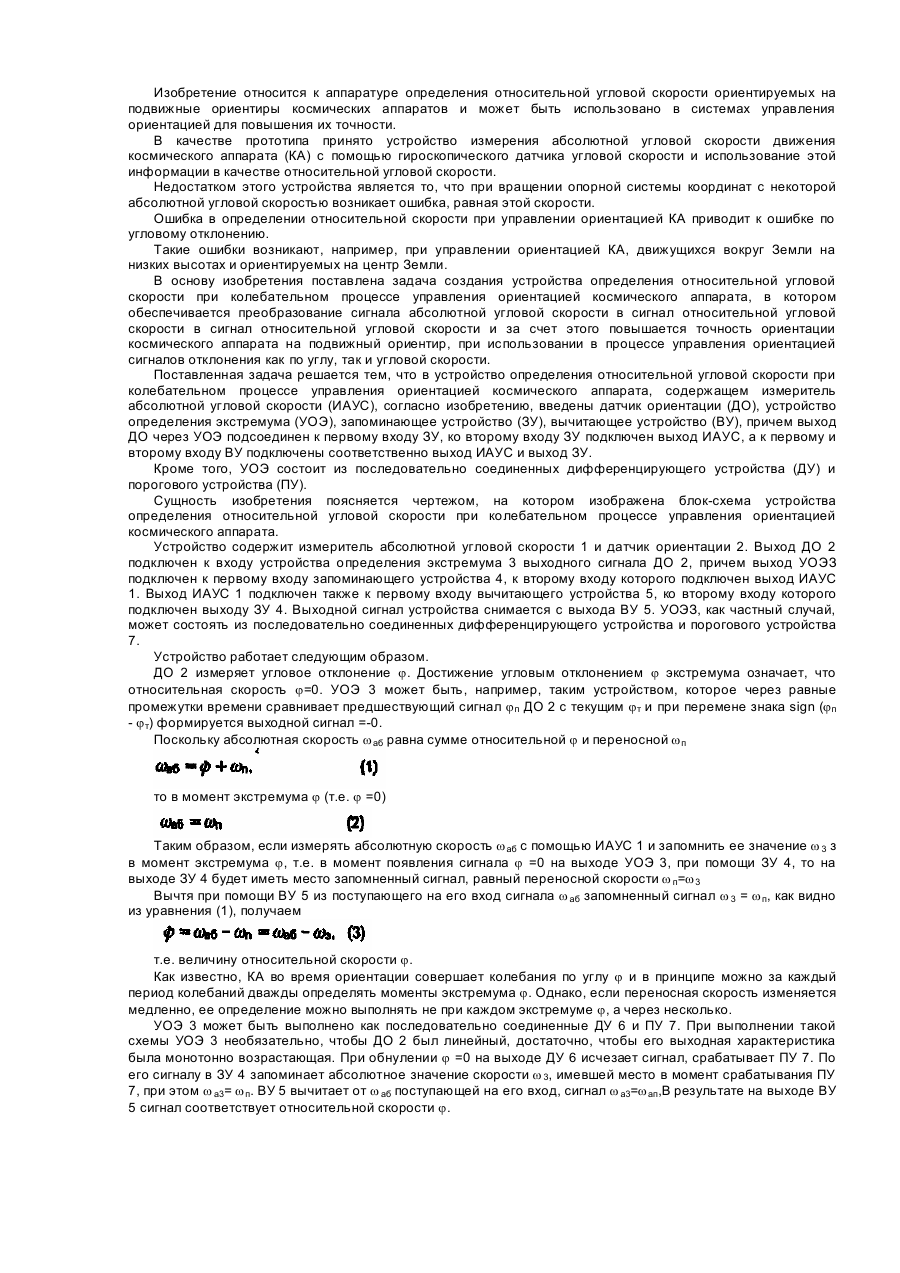
1. Устройство определения относительной угловой скорости при колебательном процессе управления ориентацией космического аппарата, содержащее измеритель абсолютной угловой скорости, отличающееся тем, что введены датчик ориентации, устройство определения экстремума, запоминающее устройство и вычитающее устройство, причем выход датчика ориентации через устройство определения экстремума подсоединен к первому входу запоминающего устройства,...
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата

Номер патенту: 53727
Опубліковано: 11.10.2010
Автори: Богатюк Ольга Анатоліївна, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: швидкості, система, апарата, літального, космічного, адаптивна, кутової, початкової, демпфірування
Формула / Реферат:
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, вихід якого через блок підсилювачів потужності з'єднаний з релейними виконавчими органами, яка відрізняється тим, що в неї введений блок визначення збурюючого моменту, вхід якого з'єднаний з виходом датчика кутової швидкості, а його вихід з'єднаний з другим...
Попередній патент: Двигунна установка
Наступний патент: Шпиндельний вузол агрегатного верстата
Випадковий патент: Спосіб виявлення покладів газу з урахуванням зносу аномалій пониження температур поверхні моря