Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв
Номер патенту: 84419
Опубліковано: 27.10.2008
Автори: Лещенко Олег Іванович, Головань В'ячеслав Григорович, Дяченко Олександр Феодосьович, Беліков Віктор Тріфонович
Формула / Реферат
1. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв, що складається з імітатора гусеничної стрічки, що знаходиться в механічному контакті з двома колесами, розміщеними в крайніх зонах гусеничного обводу, та імітатора навантаження, який відрізняється тим, що обидва колеса виконані у вигляді зубчатих, входять в зачеплення з імітатором гусеничної стрічки і закріплені на валах приводних широкорегульованих електричних двигунів, причому імітатор навантаження є широкорегульований електичний двигун, що закріплений на основі випробувального стенда з можливістю переміщення уздовж нижньої гілки гусеничного обводу, який через зубчате колесо рухомо зв'язаний з імітатором гусеничної стрічки.
2. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв по п. 1, який відрізняється тим, що один з основних приводних широкорегульованих електричних двигунів, наприклад лівий, закріплений на основі випробувального стенда з можливістю переміщення у напрямку ходу імітатора гусениці і сполучений через гвинтову передачу з додатковим регульованим електричним двигуном, вісь якого перпендикулярна осі приводного двигуна, причому ходовий гвинт гвинтової передачі із сторони, протилежної приводному двигуну, забезпечений рукояткою ручного приводу.
Текст
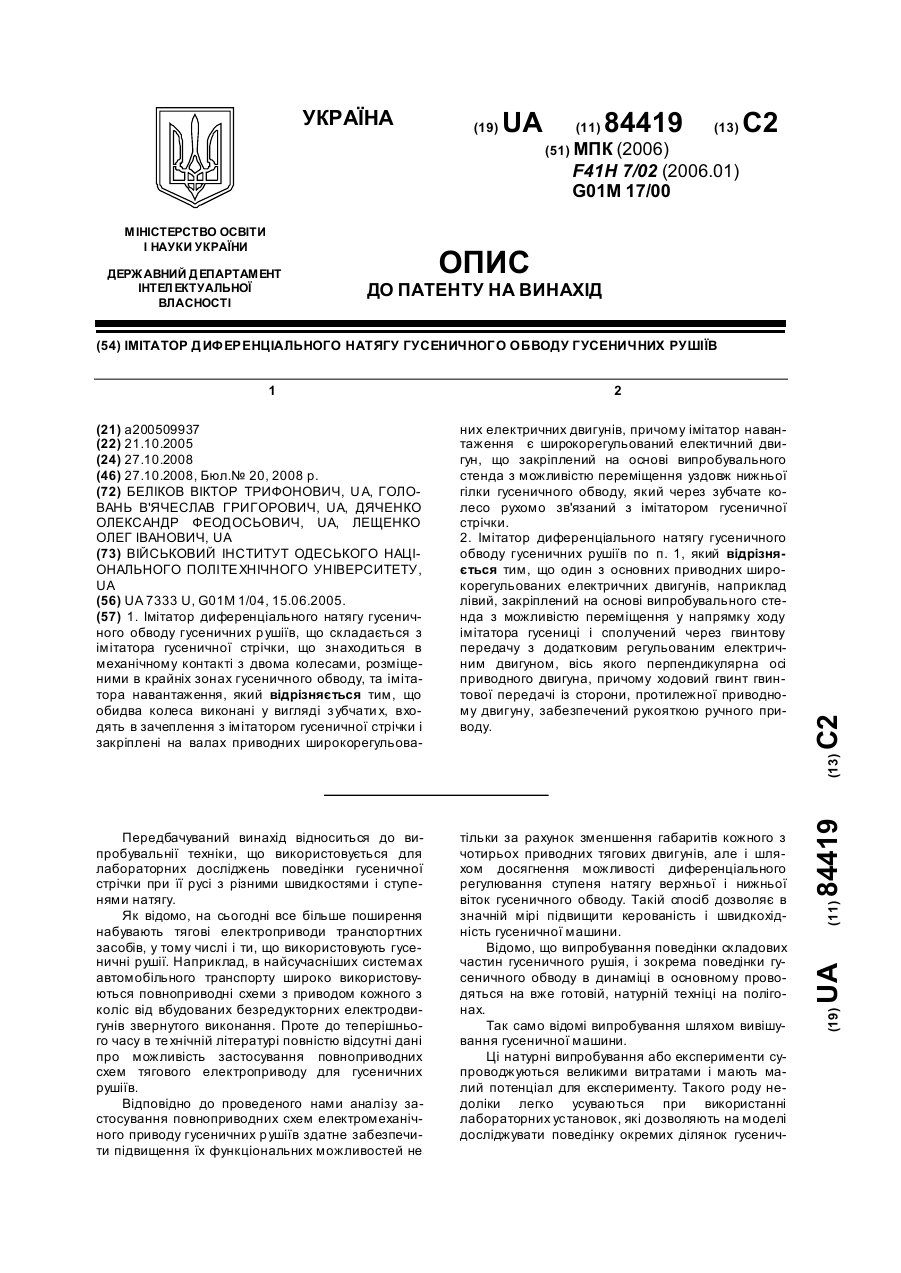
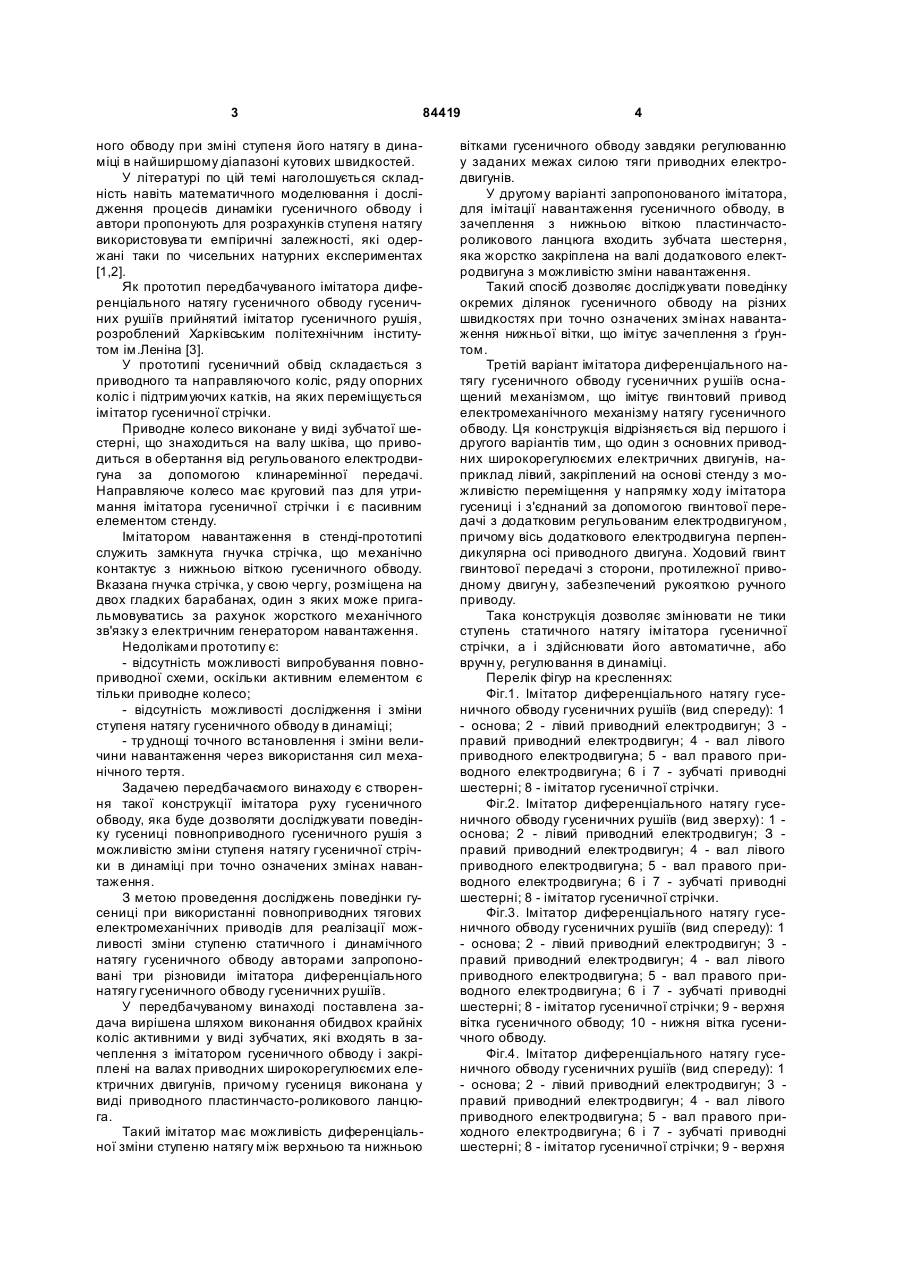
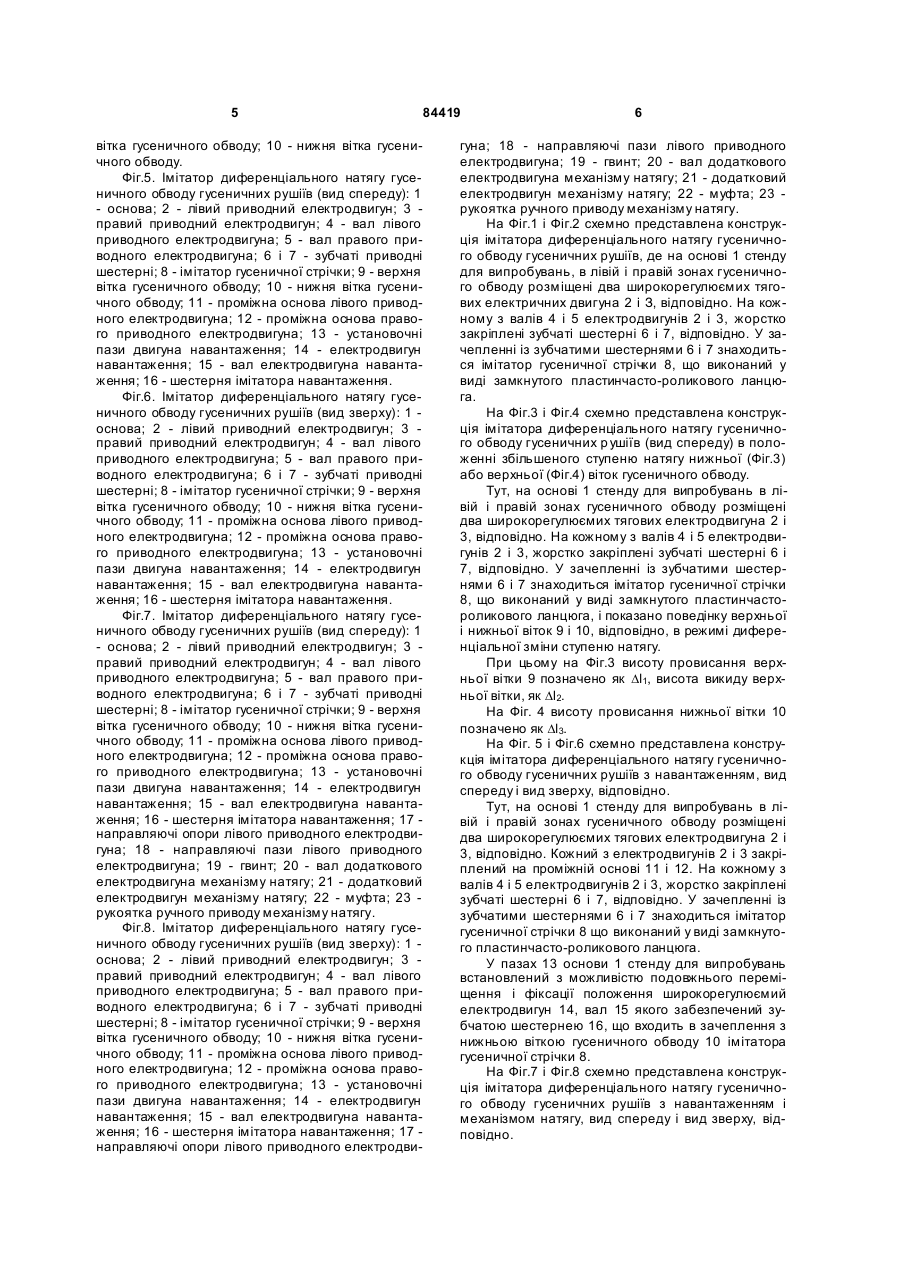
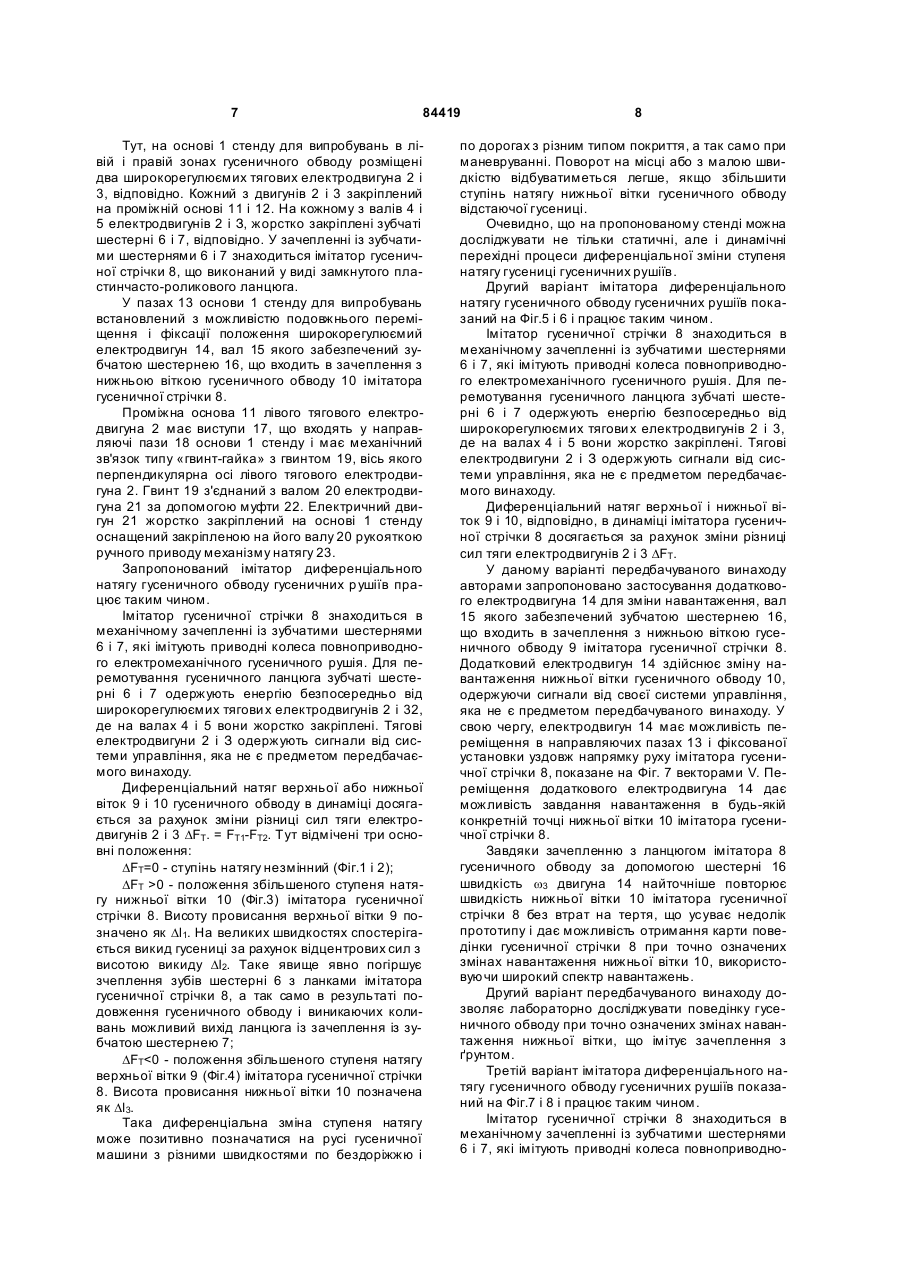
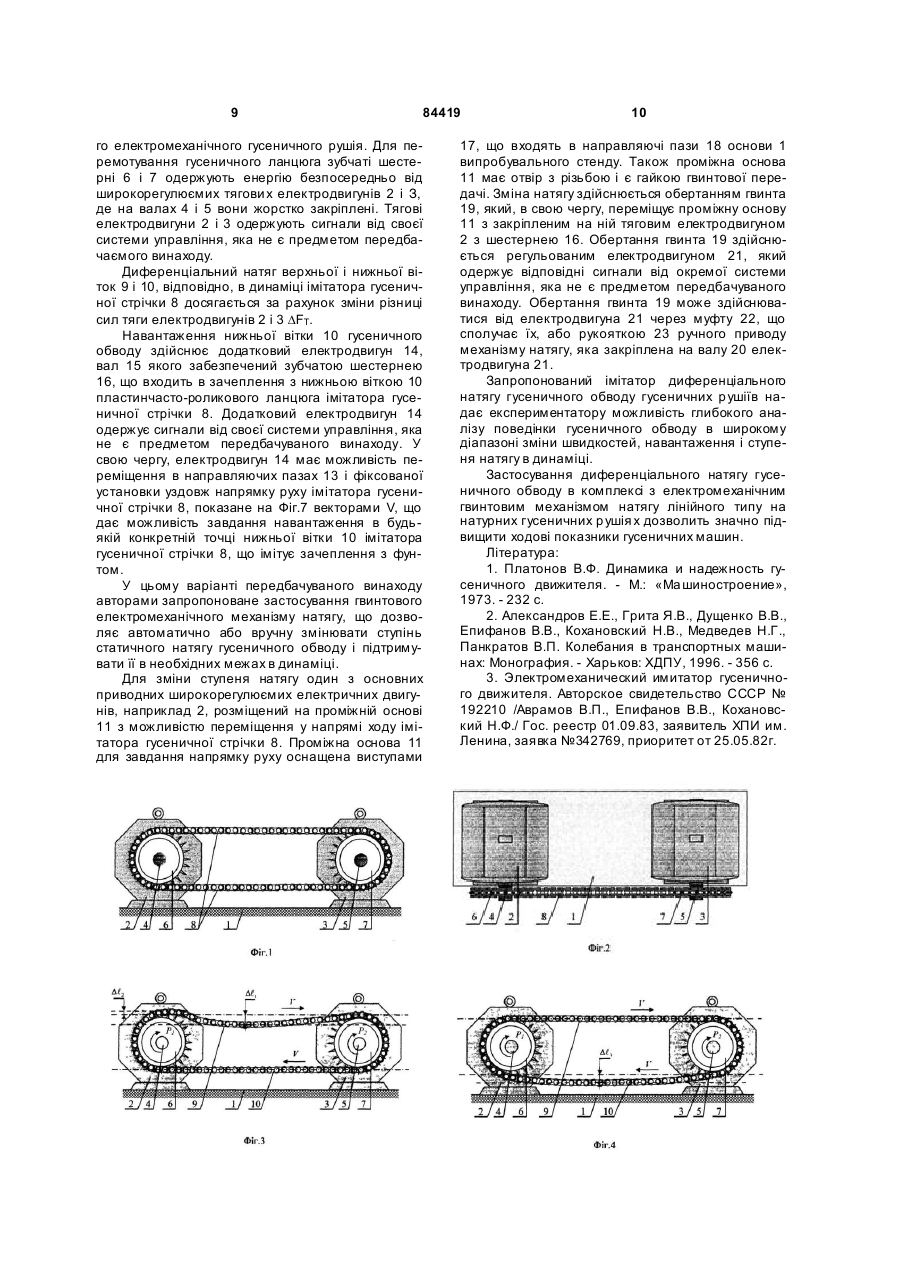
1. Імітатор диференціального натягу гусеничного обводу гусеничних р ушіїв, що складається з імітатора гусеничної стрічки, що знаходиться в механічному контакті з двома колесами, розміщеними в крайніх зонах гусеничного обводу, та імітатора навантаження, який відрізняється тим, що обидва колеса виконані у вигляді з убчати х, входять в зачеплення з імітатором гусеничної стрічки і закріплені на валах приводних широкорегульова C2 1 3 84419 ного обводу при зміні ступеня його натягу в динаміці в найширшому діапазоні кутових швидкостей. У літературі по цій темі наголошується складність навіть математичного моделювання і дослідження процесів динаміки гусеничного обводу і автори пропонують для розрахунків ступеня натягу використовува ти емпіричні залежності, які одержані таки по чисельних натурних експериментах [1,2]. Як прототип передбачуваного імітатора диференціального натягу гусеничного обводу гусеничних рушіїв прийнятий імітатор гусеничного рушія, розроблений Харківським політехнічним інститутом ім.Леніна [3]. У прототипі гусеничний обвід складається з приводного та направляючого коліс, ряду опорних коліс і підтримуючих катків, на яких переміщується імітатор гусеничної стрічки. Приводне колесо виконане у виді зубчатої шестерні, що знаходиться на валу шківа, що приводиться в обертання від регульованого електродвигуна за допомогою клинаремінної передачі. Направляюче колесо має круговий паз для утримання імітатора гусеничної стрічки і є пасивним елементом стенду. Імітатором навантаження в стенді-прототипі служить замкнута гнучка стрічка, що механічно контактує з нижньою віткою гусеничного обводу. Вказана гнучка стрічка, у свою чергу, розміщена на двох гладких барабанах, один з яких може пригальмовуватись за рахунок жорсткого механічного зв'язку з електричним генератором навантаження. Недоліками прототипу є: - відсутність можливості випробування повноприводної схеми, оскільки активним елементом є тільки приводне колесо; - відсутність можливості дослідження і зміни ступеня натягу гусеничного обводу в динаміці; - тр уднощі точного встановлення і зміни величини навантаження через використання сил механічного тертя. Задачею передбачаємого винаходу є створення такої конструкції імітатора руху гусеничного обводу, яка буде дозволяти досліджувати поведінку гусениці повноприводного гусеничного рушія з можливістю зміни ступеня натягу гусеничної стрічки в динаміці при точно означених змінах навантаження. З метою проведення досліджень поведінки гусениці при використанні повноприводних тягових електромеханічних приводів для реалізації можливості зміни ступеню статичного і динамічного натягу гусеничного обводу авторами запропоновані три різновиди імітатора диференціального натягу гусеничного обводу гусеничних рушіїв. У передбачуваному винаході поставлена задача вирішена шляхом виконання обидвох крайніх коліс активними у виді зубчатих, які входять в зачеплення з імітатором гусеничного обводу і закріплені на валах приводних широкорегулюємих електричних двигунів, причому гусениця виконана у виді приводного пластинчасто-роликового ланцюга. Такий імітатор має можливість диференціальної зміни ступеню натягу між верхньою та нижньою 4 вітками гусеничного обводу завдяки регулюванню у заданих межах силою тяги приводних електродвигунів. У другому варіанті запропонованого імітатора, для імітації навантаження гусеничного обводу, в зачеплення з нижньою віткою пластинчастороликового ланцюга входить зубчата шестерня, яка жорстко закріплена на валі додаткового електродвигуна з можливістю зміни навантаження. Такий спосіб дозволяє досліджувати поведінку окремих ділянок гусеничного обводу на різних швидкостях при точно означених змінах навантаження нижньої вітки, що імітує зачеплення з ґрунтом. Третій варіант імітатора диференціального натягу гусеничного обводу гусеничних р ушіїв оснащений механізмом, що імітує гвинтовий привод електромеханічного механізму натягу гусеничного обводу. Ця конструкція відрізняється від першого і другого варіантів тим, що один з основних приводних широкорегулюємих електричних двигунів, наприклад лівий, закріплений на основі стенду з можливістю переміщення у напрямку ходу імітатора гусениці і з'єднаний за допомогою гвинтової передачі з додатковим регульованим електродвигуном, причому вісь додаткового електродвигуна перпендикулярна осі приводного двигуна. Ходовий гвинт гвинтової передачі з сторони, протилежної приводному двигун у, забезпечений рукояткою ручного приводу. Така конструкція дозволяє змінювати не тики ступень статичного натягу імітатора гусеничної стрічки, а і здійснювати його автоматичне, або вручн у, регулювання в динаміці. Перелік фігур на кресленнях: Фіг.1. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид спереду): 1 - основа; 2 - лівий приводний електродвигун; 3 правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приводного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки. Фіг.2. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид зверху): 1 основа; 2 - лівий приводний електродвигун; З правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приводного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки. Фіг.3. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид спереду): 1 - основа; 2 - лівий приводний електродвигун; 3 правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приводного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки; 9 - верхня вітка гусеничного обводу; 10 - нижня вітка гусеничного обводу. Фіг.4. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид спереду): 1 - основа; 2 - лівий приводний електродвигун; 3 правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приходного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки; 9 - верхня 5 84419 вітка гусеничного обводу; 10 - нижня вітка гусеничного обводу. Фіг.5. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид спереду): 1 - основа; 2 - лівий приводний електродвигун; 3 правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приводного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки; 9 - верхня вітка гусеничного обводу; 10 - нижня вітка гусеничного обводу; 11 - проміжна основа лівого приводного електродвигуна; 12 - проміжна основа правого приводного електродвигуна; 13 - установочні пази двигуна навантаження; 14 - електродвигун навантаження; 15 - вал електродвигуна навантаження; 16 - шестерня імітатора навантаження. Фіг.6. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид зверху): 1 основа; 2 - лівий приводний електродвигун; 3 правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приводного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки; 9 - верхня вітка гусеничного обводу; 10 - нижня вітка гусеничного обводу; 11 - проміжна основа лівого приводного електродвигуна; 12 - проміжна основа правого приводного електродвигуна; 13 - установочні пази двигуна навантаження; 14 - електродвигун навантаження; 15 - вал електродвигуна навантаження; 16 - шестерня імітатора навантаження. Фіг.7. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид спереду): 1 - основа; 2 - лівий приводний електродвигун; 3 правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приводного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки; 9 - верхня вітка гусеничного обводу; 10 - нижня вітка гусеничного обводу; 11 - проміжна основа лівого приводного електродвигуна; 12 - проміжна основа правого приводного електродвигуна; 13 - установочні пази двигуна навантаження; 14 - електродвигун навантаження; 15 - вал електродвигуна навантаження; 16 - шестерня імітатора навантаження; 17 направляючі опори лівого приводного електродвигуна; 18 - направляючі пази лівого приводного електродвигуна; 19 - гвинт; 20 - вал додаткового електродвигуна механізму натягу; 21 - додатковий електродвигун механізму натягу; 22 - муфта; 23 рукоятка ручного приводу механізму натягу. Фіг.8. Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв (вид зверху): 1 основа; 2 - лівий приводний електродвигун; 3 правий приводний електродвигун; 4 - вал лівого приводного електродвигуна; 5 - вал правого приводного електродвигуна; 6 і 7 - зубчаті приводні шестерні; 8 - імітатор гусеничної стрічки; 9 - верхня вітка гусеничного обводу; 10 - нижня вітка гусеничного обводу; 11 - проміжна основа лівого приводного електродвигуна; 12 - проміжна основа правого приводного електродвигуна; 13 - установочні пази двигуна навантаження; 14 - електродвигун навантаження; 15 - вал електродвигуна навантаження; 16 - шестерня імітатора навантаження; 17 направляючі опори лівого приводного електродви 6 гуна; 18 - направляючі пази лівого приводного електродвигуна; 19 - гвинт; 20 - вал додаткового електродвигуна механізму натягу; 21 - додатковий електродвигун механізму натягу; 22 - муфта; 23 рукоятка ручного приводу механізму натягу. На Фіг.1 і Фіг.2 схемно представлена конструкція імітатора диференціального натягу гусеничного обводу гусеничних рушіїв, де на основі 1 стенду для випробувань, в лівій і правій зонах гусеничного обводу розміщені два широкорегулюємих тягових електричних двигуна 2 і З, відповідно. На кожному з валів 4 і 5 електродвигунів 2 і 3, жорстко закріплені зубчаті шестерні 6 і 7, відповідно. У зачепленні із зубчатими шестернями 6 і 7 знаходиться імітатор гусеничної стрічки 8, що виконаний у виді замкнутого пластинчасто-роликового ланцюга. На Фіг.3 і Фіг.4 схемно представлена конструкція імітатора диференціального натягу гусеничного обводу гусеничних р ушіїв (вид спереду) в положенні збільшеного ступеню натягу нижньої (Фіг.3) або верхньої (Фіг.4) віток гусеничного обводу. Тут, на основі 1 стенду для випробувань в лівій і правій зонах гусеничного обводу розміщені два широкорегулюємих тягових електродвигуна 2 і 3, відповідно. На кожному з валів 4 і 5 електродвигунів 2 і 3, жорстко закріплені зубчаті шестерні 6 і 7, відповідно. У зачепленні із зубчатими шестернями 6 і 7 знаходиться імітатор гусеничної стрічки 8, що виконаний у виді замкнутого пластинчастороликового ланцюга, і показано поведінку верхньої і нижньої віток 9 і 10, відповідно, в режимі диференціальної зміни ступеню натягу. При цьому на Фіг.3 висоту провисання верхньої вітки 9 позначено як Dl1, висота викиду верхньої вітки, як Dl2. На Фіг. 4 висоту провисання нижньої вітки 10 позначено як Dl3. На Фіг. 5 і Фіг.6 схемно представлена конструкція імітатора диференціального натягу гусеничного обводу гусеничних рушіїв з навантаженням, вид спереду і вид зверху, відповідно. Тут, на основі 1 стенду для випробувань в лівій і правій зонах гусеничного обводу розміщені два широкорегулюємих тягових електродвигуна 2 і 3, відповідно. Кожний з електродвигунів 2 і 3 закріплений на проміжній основі 11 і 12. На кожному з валів 4 і 5 електродвигунів 2 і 3, жорстко закріплені зубчаті шестерні 6 і 7, відповідно. У зачепленні із зубчатими шестернями 6 і 7 знаходиться імітатор гусеничної стрічки 8 що виконаний у виді замкнутого пластинчасто-роликового ланцюга. У пазах 13 основи 1 стенду для випробувань встановлений з можливістю подовжнього переміщення і фіксації положення широкорегулюємий електродвигун 14, вал 15 якого забезпечений зубчатою шестернею 16, що входить в зачеплення з нижньою віткою гусеничного обводу 10 імітатора гусеничної стрічки 8. На Фіг.7 і Фіг.8 схемно представлена конструкція імітатора диференціального натягу гусеничного обводу гусеничних рушіїв з навантаженням і механізмом натягу, вид спереду і вид зверху, відповідно. 7 84419 Тут, на основі 1 стенду для випробувань в лівій і правій зонах гусеничного обводу розміщені два широкорегулюємих тягових електродвигуна 2 і 3, відповідно. Кожний з двигунів 2 і 3 закріплений на проміжній основі 11 і 12. На кожному з валів 4 і 5 електродвигунів 2 і З, жорстко закріплені зубчаті шестерні 6 і 7, відповідно. У зачепленні із зубчатими шестернями 6 і 7 знаходиться імітатор гусеничної стрічки 8, що виконаний у виді замкнутого пластинчасто-роликового ланцюга. У пазах 13 основи 1 стенду для випробувань встановлений з можливістю подовжнього переміщення і фіксації положення широкорегулюємий електродвигун 14, вал 15 якого забезпечений зубчатою шестернею 16, що входить в зачеплення з нижньою віткою гусеничного обводу 10 імітатора гусеничної стрічки 8. Проміжна основа 11 лівого тягового електродвигуна 2 має виступи 17, що входять у направляючі пази 18 основи 1 стенду і має механічний зв'язок типу «гвинт-гайка» з гвинтом 19, вісь якого перпендикулярна осі лівого тягового електродвигуна 2. Гвинт 19 з'єднаний з валом 20 електродвигуна 21 за допомогою муфти 22. Електричний двигун 21 жорстко закріплений на основі 1 стенду оснащений закріпленою на його валу 20 рукояткою ручного приводу механізму натягу 23. Запропонований імітатор диференціального натягу гусеничного обводу гусеничних р ушіїв працює таким чином. Імітатор гусеничної стрічки 8 знаходиться в механічному зачепленні із зубчатими шестернями 6 і 7, які імітують приводні колеса повноприводного електромеханічного гусеничного рушія. Для перемотування гусеничного ланцюга зубчаті шестерні 6 і 7 одержують енергію безпосередньо від широкорегулюємих тягови х електродвигунів 2 і 32, де на валах 4 і 5 вони жорстко закріплені. Тягові електродвигуни 2 і З одержують сигнали від системи управління, яка не є предметом передбачаємого винаходу. Диференціальний натяг верхньої або нижньої віток 9 і 10 гусеничного обводу в динаміці досягається за рахунок зміни різниці сил тяги електродвигунів 2 і 3 DFТ. = FТ1-FТ2. Тут відмічені три основні положення: DFТ=0 - ступінь натягу незмінний (Фіг.1 і 2); DFТ >0 - положення збільшеного ступеня натягу нижньої вітки 10 (Фіг.3) імітатора гусеничної стрічки 8. Висоту провисання верхньої вітки 9 позначено як Dl1. На великих швидкостях спостерігається викид гусениці за рахунок відцентрових сил з висотою викиду Dl2. Таке явище явно погіршує зчеплення зубів шестерні 6 з ланками імітатора гусеничної стрічки 8, а так само в результаті подовження гусеничного обводу і виникаючих коливань можливий вихід ланцюга із зачеплення із зубчатою шестернею 7; DFТ
ДивитисяДодаткова інформація
Назва патенту англійськоюSimulator of differential tension of caterpillar track assembly of tracked running gears
Автори англійськоюBelikov Viktor Tryfonovych, Holovan Viacheslav Hryhorovych, Diachenko Oleksandr Feodosiiovych, Leschenko Oleh Ivanovych
Назва патенту російськоюИмитатор дифференциального натяжения гусеничного обвода гусеничних движителей
Автори російськоюБеликов Виктор Трифонович, Головань Вячеслав Григорьевич, Дьяченко Александр Феодосьевич, Лещенко Олег Иванович
МПК / Мітки
МПК: F41H 7/02, G01M 17/00
Мітки: гусеничного, диференціального, рушіїв, натягу, гусеничних, імітатор, обводу
Код посилання
<a href="https://ua.patents.su/6-84419-imitator-diferencialnogo-natyagu-gusenichnogo-obvodu-gusenichnikh-rushiv.html" target="_blank" rel="follow" title="База патентів України">Імітатор диференціального натягу гусеничного обводу гусеничних рушіїв</a>
Стенд для дослідження гусеничних зачеплень
Номер патенту: 7333
Опубліковано: 15.06.2005
Автори: Крупко Валерій Григорович, Дорохов Микола Юрійович, Бондаренко Тімур Романович
МПК: G01M 17/007, G01M 13/00
Мітки: зачеплень, гусеничних, дослідження, стенд
Формула / Реферат:
Стенд для дослідження гусеничних зачеплень, який містить привід, нерухому і рухому рами, ланцюгову передачу з привідною і навантажувальною зірочками, який відрізняється тим, що додатково містить дві зірочки з несиметричними профілями кулаків, навколо яких замкнений силовий контур ланцюгом, що складається із ланок з несиметричними, подібними до кулаків, профілями гребенів, з можливістю входження (контакту) при випробуванні, які входять одними...
Імітатор електричного опору
Номер патенту: 47170
Опубліковано: 17.06.2002
Автори: Бойко Оксана Василівна, Столярчук Петро Гаврилович, Яцук Василь Олександрович
МПК: G01R 27/00, H03H 11/02
Мітки: електричного, імітатор, опору
Формула / Реферат:
Імітатор електричного опору, що містить перший і другий операційний підсилювачі, кодокерований подільник напруги і зразковий резистор, перший вивід якого з'єднаний з першим входом імітатора, а другий вивід з'єднаний з виходом першого операційного підсилювача, інвертуючий вхід якого з'єднаний з другим входом імітатора, а неінвертуючий вхід - зі спільною шиною, причому вихід першого операційного підсилювача з'єднаний через кодокерований...
Електромеханічний імітатор рульового керування
Номер патенту: 74201
Опубліковано: 15.11.2005
Автори: Крапива Валерій Вікторович, Крапива Тетяна Михайлівна
МПК: G09B 9/02
Мітки: керування, електромеханічний, рульового, імітатор
Формула / Реферат:
Електромеханічний імітатор рульового керування, який містить рульове колесо, вал, механізм навантаження та обмеження повороту, який відрізняється тим, що вал оснащений електромеханічним імітатором люфту, який розміщений між рульовим колесом і механізмом навантаження та обмеження повороту і складений з розміщених в корпусі взаємозв'язаних сегментів, виконаних у вигляді конічної пари з регульованим зазором між виступом одного сегмента та пазом...
Стенд для дослідження гусеничного рушія
Номер патенту: 10741
Опубліковано: 15.11.2005
Автори: Єпіфанов Віталій Валерійович, Богач Андрій Станіславович, Волонцевич Дмитро Олегович, Янчик Олександр Григорович, Павленко Сергій Валерійович
МПК: G01M 17/007
Мітки: стенд, дослідження, гусеничного, рушія
Формула / Реферат:
1. Стенд для дослідження гусеничного рушія, який містить нерухому основу, на якій розміщені підтримувальні та підресорені опорні котки, ведуче та напрямне колеса, охоплені гусеницею, привід ведучого колеса, опорні барабани, охоплені гнучкою стрічкою, верхня ланка якої контактує з опорною ділянкою гусениці та спирається на пластину, який відрізняється тим, що опорні барабани встановлені ексцентрично.2. Стенд для дослідження гусеничного...
Ходова частина гусеничного транспортного засобу

Номер патенту: 81943
Опубліковано: 25.02.2008
Автори: Рульов Віктор Миколайович, Подусов Віктор Опанасович
МПК: B62D 55/08
Мітки: транспортного, ходова, гусеничного, частина, засобу
Формула / Реферат:
1. Ходова частина гусеничного транспортного засобу, яка містить направляюче колесо з механізмом натягу й опорні котки, установлені на візку, зв'язаному з кістяком транспортного засобу за допомогою двох підресорних балансирів, шарнірно з'єднаних з механізмом натягу, яка відрізняється тим, що направляюче колесо є опорним і встановлено з опорним котком на одному з двох взаємно зрівноважених візків, на іншому візку встановлені опорні елементи,...
Попередній патент: Похідні гуанідину з антимікробною дією на основі діаміну
Випадковий патент: Звіт про використання ресурсів загального каналу передачі даних