Пристрій та спосіб дегазації розплавленого металу

Формула / Реферат
1. Пристрій для дегазації розплавленого металу, який включає камеру для розміщення приймача, який містить розплавлений метал і шар шлаку над розплавленим металом, відкачувальний насосний пристрій для створення розрідження в камері, датчик для виведення сигналу, що показує рівень поверхні шлаку, і засоби керування, виконані з можливістю використання сигналу для керування швидкістю створення розрідження в камері, здатного перешкоджати витіканню шлаку з приймача.
2. Пристрій за п. 1, в якому датчик містить локаційний приймач-передавач для спрямування локаційного променя до шлаку і одержання луни локаційного променя від поверхні шлаку.
3. Пристрій за п. 2, в якому датчик розташований над приймачем так, що період між виведенням локаційного променя і прийомом луни показує відстань між датчиком і поверхнею шлаку.
4. Пристрій за п. 3, в якому сигнал, спрямований від датчика, показує довжину згаданого періоду, причому засоби керування виконані з можливістю керування швидкістю створення розрідження в камері у відповідь на нього.
5. Пристрій за будь-яким з пп. 1-4, в якому засоби керування виконані з можливістю одержання множини згаданих сигналів від датчика, визначення на основі згаданих сигналів швидкості зміни рівня поверхні шлаку в приймачі і керування швидкістю створення розрідження в камері залежно від них.
6. Пристрій за п. 5, в якому засоби керування виконані з можливістю керування швидкістю створення розрідження в камері залежно і від рівня поверхні шлаку, і від швидкості зміни рівня поверхні шлаку.
7. Пристрій за будь-яким з пп. 1-6, в якому відкачувальний насосний пристрій містить щонайменше один насос, а засоби керування виконані з можливістю регулювання швидкості обертання насоса для керування швидкістю створення розрідження в камері.
8. Пристрій за п. 7, в якому відкачувальний насосний пристрій містить електродвигун з регульованою швидкістю для приведення в дію згаданого насоса, причому засоби керування виконані з можливістю зміни живлення або струму, що має подаватися до електродвигуна з регульованою швидкістю, і швидкості обертання насоса.
9. Пристрій за п. 8, в якому засоби керування виконані з можливістю зміни частоти живлення, що має подаватися до електродвигуна для регулювання швидкості насоса.
10. Пристрій за будь-яким з пп. 7-9, в якому засоби керування виконані з можливістю вимкнення згаданого щонайменше одного насоса для керування швидкістю створення розрідження в камері.
11. Пристрій для дегазації розплавленого металу, який містить камеру для розміщення приймача, який містить розплавлений метал і шар шлаку над розплавленим металом, відкачувальний насосний пристрій для створення розрідження в камері, датчик для виведення сигналу, що показує рівень поверхні шлаку, і засоби керування для вимкнення щонайменше одного насоса відкачувального насосного пристрою залежно від сигналу для запобігання витіканню шлаку з приймача.
12. Спосіб дегазації розплавленого металу, який включає етапи розташування приймача, який містить розплавлений метал і шар шлаку над розплавленим металом в камері, створення розрідження в камері, одержання від датчика сигналу, що показує рівень поверхні шлаку, і використання сигналу для керування швидкістю створення розрідження в камері для того, щоб перешкоджати витіканню шлаку з приймача.
13. Спосіб за п. 12, в якому датчик розташований над приймачем, і сигнал показує відстань між датчиком і поверхнею шлаку.
14. Спосіб за п. 12 або п.13, в якому швидкістю створення розрідження в камері керують залежно від швидкості зміни рівня поверхні шлаку.
15. Спосіб за п. 14, в якому швидкістю створення розрідження в камері керують залежно і від рівня поверхні шлаку, і від швидкості зміни рівня поверхні шлаку.
16. Спосіб за будь-яким з пп. 12-15, в якому швидкістю створення розрідження в камері керують шляхом регулювання швидкості обертання насоса, що використовують для створення розрідження в камері.
17. Спосіб за п. 16, в якому швидкість насоса регулюють шляхом зміни живлення або струму, що подають до його електродвигуна з регульованою швидкістю для приведення в дію насоса.
18. Спосіб за п. 17, в якому частоту живлення, що подається до електродвигуна, змінюють для регулювання швидкості насоса.
19. Спосіб за будь-яким з пп. 16-18, в якому насос вимикають для керування швидкістю створення розрідження в камері.
20. Спосіб дегазації розплавленого металу, який включає етапи розташування приймача, який містить розплавлений метал і шар шлаку над розплавленим металом в камері, створення щонайменше одним насосом розрідження в камері, одержання від датчика сигналу, що показує рівень поверхні шлаку, і вимкнення щонайменше одного насоса, що використовують для створення розрідження в камері залежно від сигналу для запобігання витіканню шлаку з приймача.
Текст
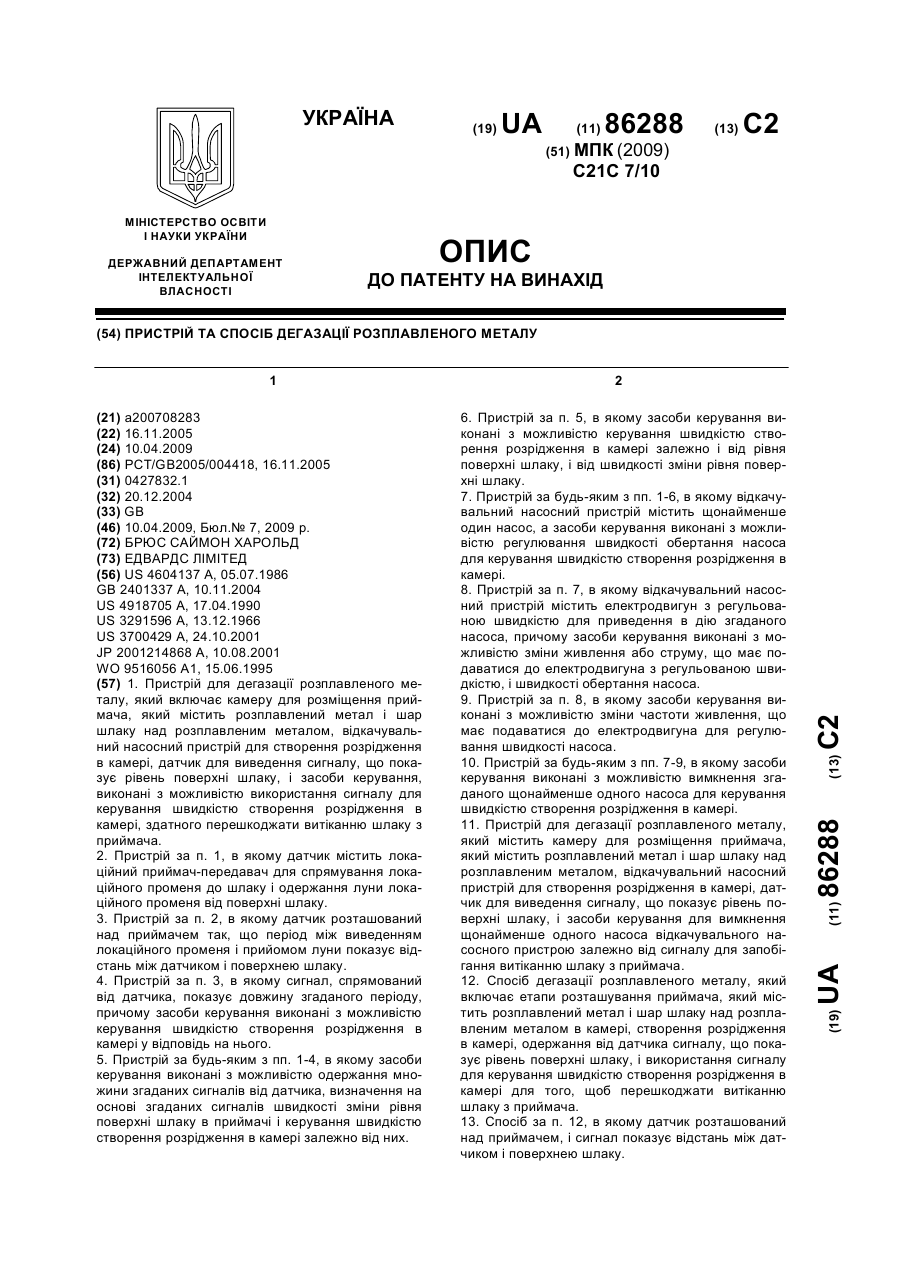
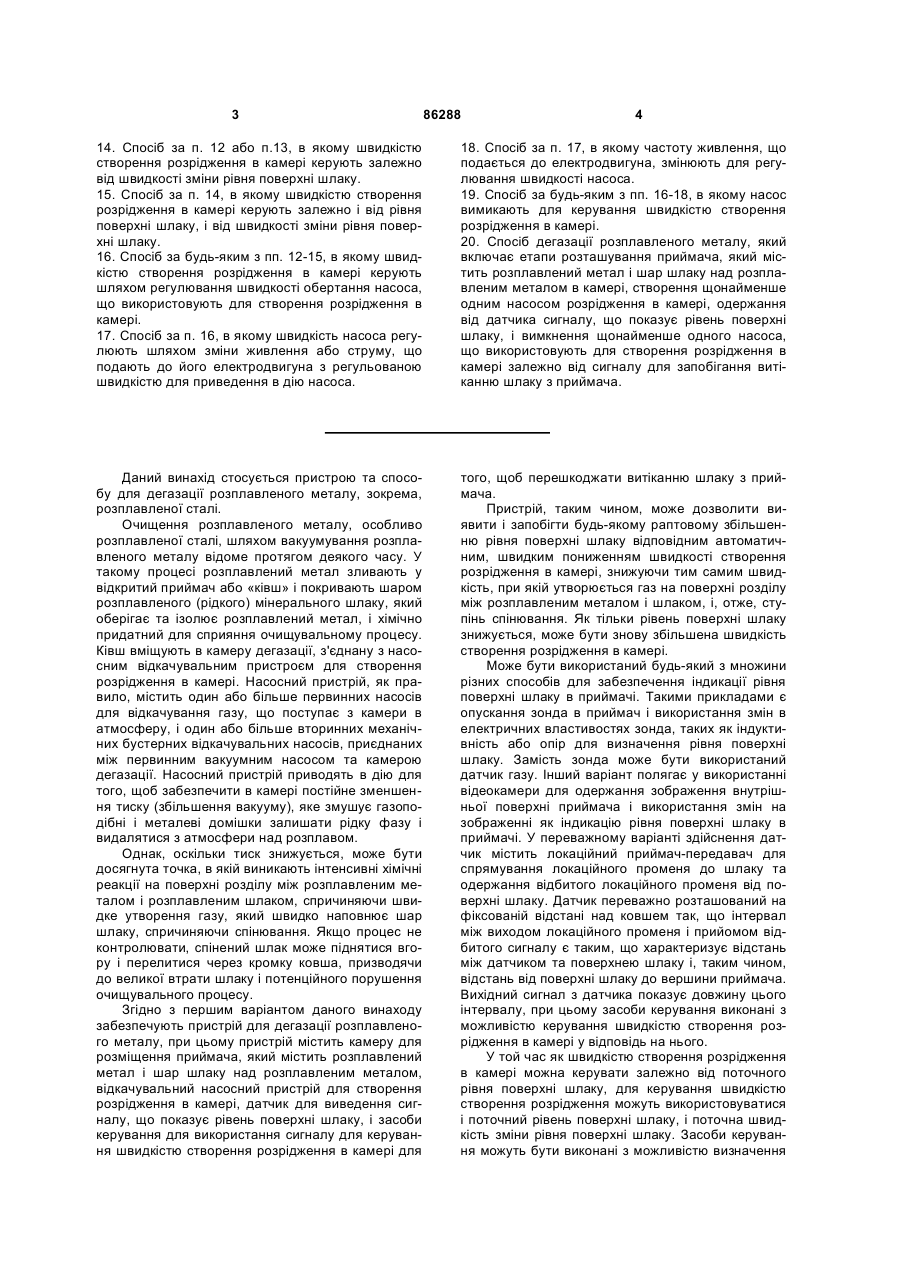
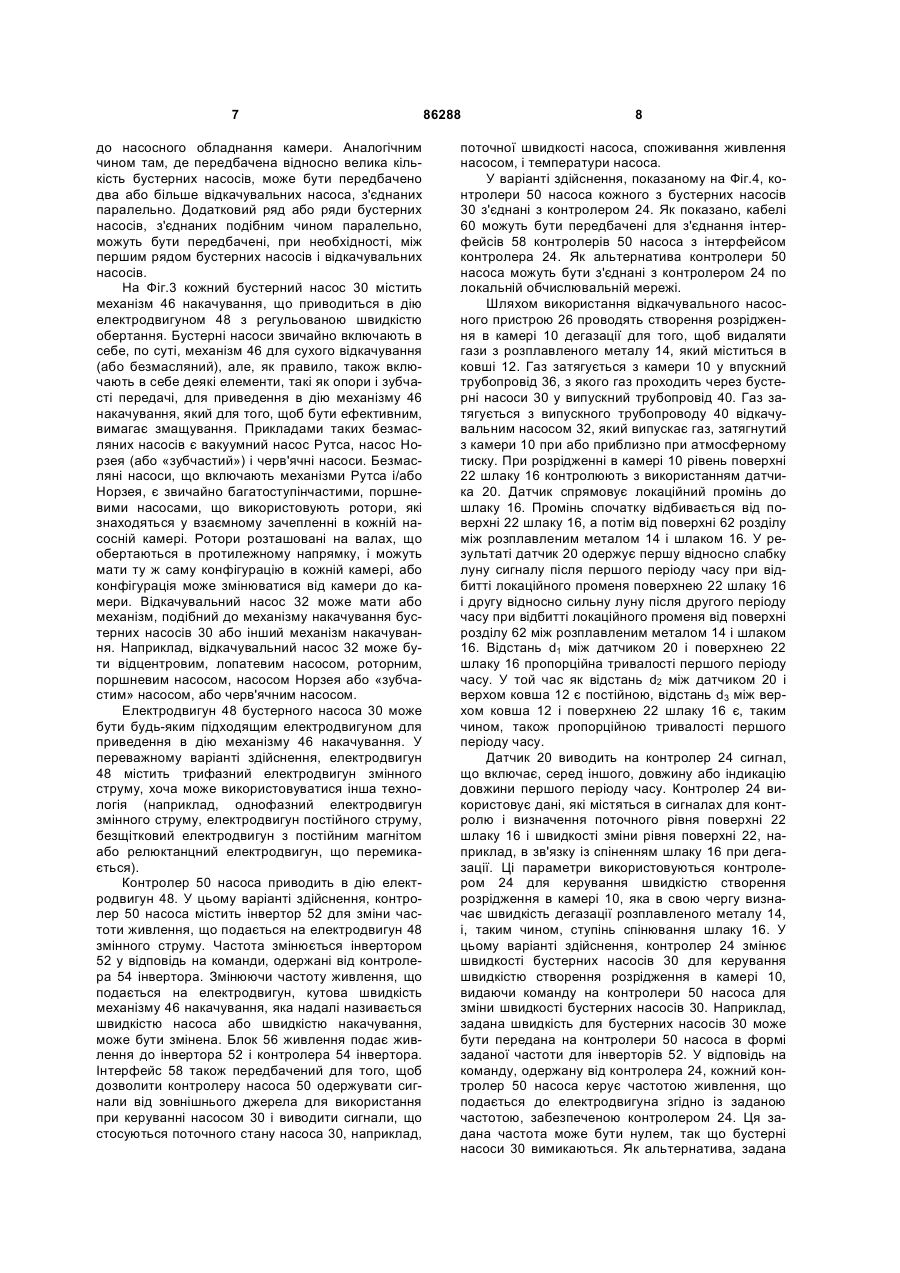
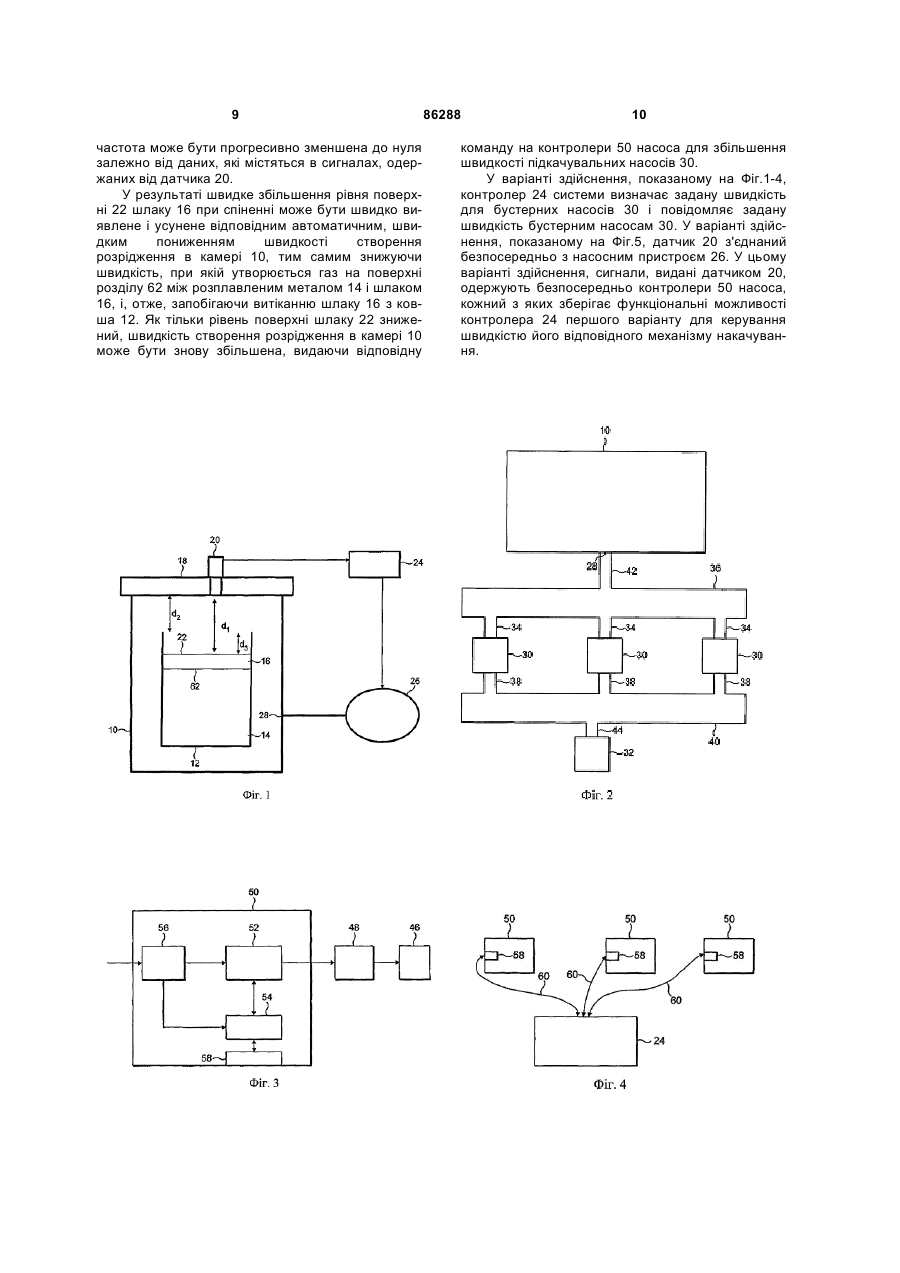
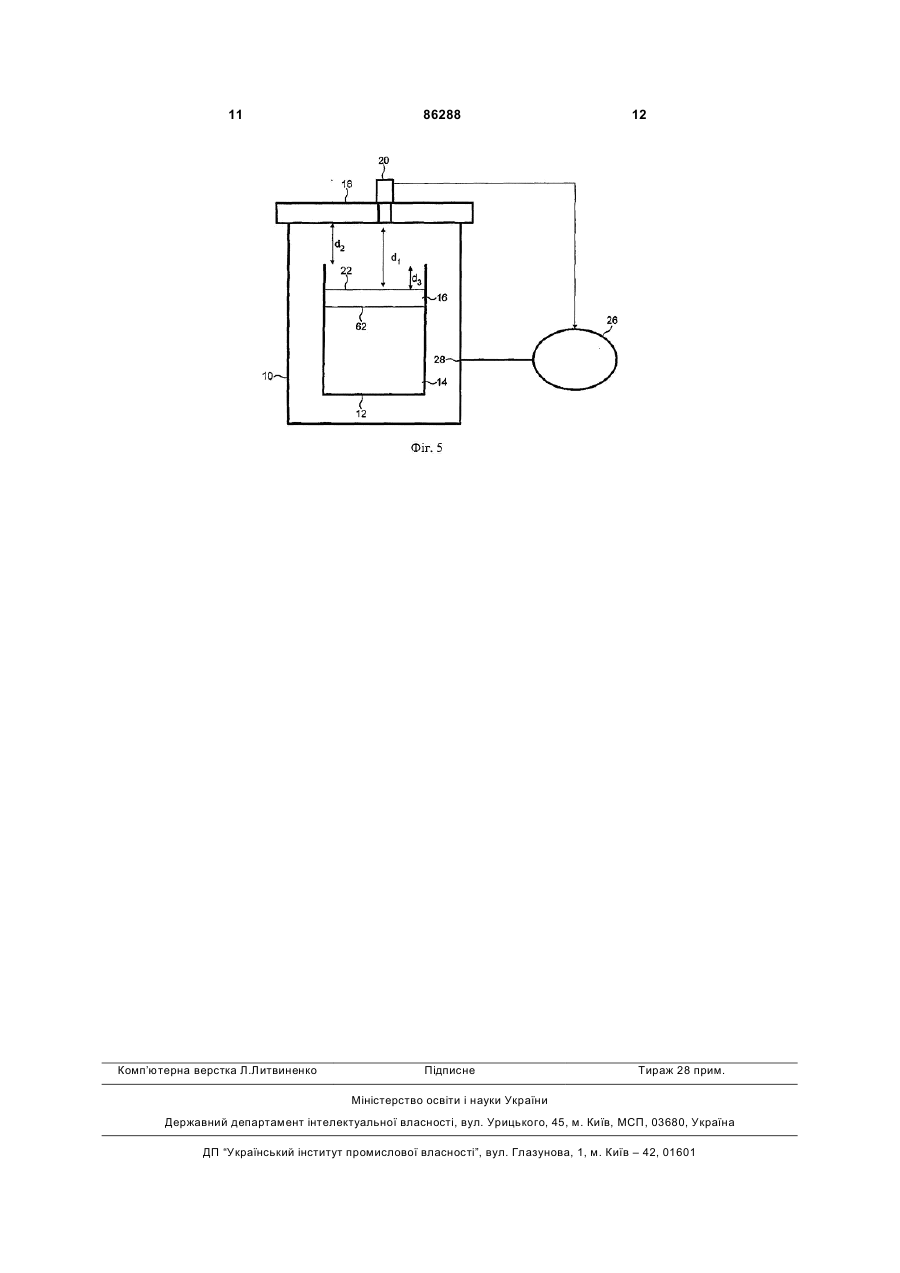
1. Пристрій для дегазації розплавленого металу, який включає камеру для розміщення приймача, який містить розплавлений метал і шар шлаку над розплавленим металом, відкачувальний насосний пристрій для створення розрідження в камері, датчик для виведення сигналу, що показує рівень поверхні шлаку, і засоби керування, виконані з можливістю використання сигналу для керування швидкістю створення розрідження в камері, здатного перешкоджати витіканню шлаку з приймача. 2. Пристрій за п. 1, в якому датчик містить локаційний приймач-передавач для спрямування локаційного променя до шлаку і одержання луни локаційного променя від поверхні шлаку. 3. Пристрій за п. 2, в якому датчик розташований над приймачем так, що період між виведенням локаційного променя і прийомом луни показує відстань між датчиком і поверхнею шлаку. 4. Пристрій за п. 3, в якому сигнал, спрямований від датчика, показує довжину згаданого періоду, причому засоби керування виконані з можливістю керування швидкістю створення розрідження в камері у відповідь на нього. 5. Пристрій за будь-яким з пп. 1-4, в якому засоби керування виконані з можливістю одержання множини згаданих сигналів від датчика, визначення на основі згаданих сигналів швидкості зміни рівня поверхні шлаку в приймачі і керування швидкістю створення розрідження в камері залежно від них. 2 (19) 1 3 86288 4 14. Спосіб за п. 12 або п.13, в якому швидкістю створення розрідження в камері керують залежно від швидкості зміни рівня поверхні шлаку. 15. Спосіб за п. 14, в якому швидкістю створення розрідження в камері керують залежно і від рівня поверхні шлаку, і від швидкості зміни рівня поверхні шлаку. 16. Спосіб за будь-яким з пп. 12-15, в якому швидкістю створення розрідження в камері керують шляхом регулювання швидкості обертання насоса, що використовують для створення розрідження в камері. 17. Спосіб за п. 16, в якому швидкість насоса регулюють шляхом зміни живлення або струму, що подають до його електродвигуна з регульованою швидкістю для приведення в дію насоса. 18. Спосіб за п. 17, в якому частоту живлення, що подається до електродвигуна, змінюють для регулювання швидкості насоса. 19. Спосіб за будь-яким з пп. 16-18, в якому насос вимикають для керування швидкістю створення розрідження в камері. 20. Спосіб дегазації розплавленого металу, який включає етапи розташування приймача, який містить розплавлений метал і шар шлаку над розплавленим металом в камері, створення щонайменше одним насосом розрідження в камері, одержання від датчика сигналу, що показує рівень поверхні шлаку, і вимкнення щонайменше одного насоса, що використовують для створення розрідження в камері залежно від сигналу для запобігання витіканню шлаку з приймача. Даний винахід стосується пристрою та способу для дегазації розплавленого металу, зокрема, розплавленої сталі. Очищення розплавленого металу, особливо розплавленої сталі, шляхом вакуумування розплавленого металу відоме протягом деякого часу. У такому процесі розплавлений метал зливають у відкритий приймач або «ківш» і покривають шаром розплавленого (рідкого) мінерального шлаку, який оберігає та ізолює розплавлений метал, і хімічно придатний для сприяння очищувальному процесу. Ківш вміщують в камеру дегазації, з'єднану з насосним відкачувальним пристроєм для створення розрідження в камері. Насосний пристрій, як правило, містить один або більше первинних насосів для відкачування газу, що поступає з камери в атмосферу, і один або більше вторинних механічних бустерних відкачувальних насосів, приєднаних між первинним вакуумним насосом та камерою дегазації. Насосний пристрій приводять в дію для того, щоб забезпечити в камері постійне зменшення тиску (збільшення вакууму), яке змушує газоподібні і металеві домішки залишати рідку фазу і видалятися з атмосфери над розплавом. Однак, оскільки тиск знижується, може бути досягнута точка, в якій виникають інтенсивні хімічні реакції на поверхні розділу між розплавленим металом і розплавленим шлаком, спричиняючи швидке утворення газу, який швидко наповнює шар шлаку, спричиняючи спінювання. Якщо процес не контролювати, спінений шлак може піднятися вгору і перелитися через кромку ковша, призводячи до великої втрати шлаку і потенційного порушення очищувального процесу. Згідно з першим варіантом даного винаходу забезпечують пристрій для дегазації розплавленого металу, при цьому пристрій містить камеру для розміщення приймача, який містить розплавлений метал і шар шлаку над розплавленим металом, відкачувальний насосний пристрій для створення розрідження в камері, датчик для виведення сигналу, що показує рівень поверхні шлаку, і засоби керування для використання сигналу для керування швидкістю створення розрідження в камері для того, щоб перешкоджати витіканню шлаку з приймача. Пристрій, таким чином, може дозволити виявити і запобігти будь-якому раптовому збільшенню рівня поверхні шлаку відповідним автоматичним, швидким пониженням швидкості створення розрідження в камері, знижуючи тим самим швидкість, при якій утворюється газ на поверхні розділу між розплавленим металом і шлаком, і, отже, ступінь спінювання. Як тільки рівень поверхні шлаку знижується, може бути знову збільшена швидкість створення розрідження в камері. Може бути використаний будь-який з множини різних способів для забезпечення індикації рівня поверхні шлаку в приймачі. Такими прикладами є опускання зонда в приймач і використання змін в електричних властивостях зонда, таких як індуктивність або опір для визначення рівня поверхні шлаку. Замість зонда може бути використаний датчик газу. Інший варіант полягає у використанні відеокамери для одержання зображення внутрішньої поверхні приймача і використання змін на зображенні як індикацію рівня поверхні шлаку в приймачі. У переважному варіанті здійснення датчик містить локаційний приймач-передавач для спрямування локаційного променя до шлаку та одержання відбитого локаційного променя від поверхні шлаку. Датчик переважно розташований на фіксованій відстані над ковшем так, що інтервал між виходом локаційного променя і прийомом відбитого сигналу є таким, що характеризує відстань між датчиком та поверхнею шлаку і, таким чином, відстань від поверхні шлаку до вершини приймача. Вихідний сигнал з датчика показує довжину цього інтервалу, при цьому засоби керування виконані з можливістю керування швидкістю створення розрідження в камері у відповідь на нього. У той час як швидкістю створення розрідження в камері можна керувати залежно від поточного рівня поверхні шлаку, для керування швидкістю створення розрідження можуть використовуватися і поточний рівень поверхні шлаку, і поточна швидкість зміни рівня поверхні шлаку. Засоби керування можуть бути виконані з можливістю визначення 5 швидкості зміни рівня поверхні шлаку на основі даних, які містяться у множині сигналів, одержаних від датчика в заздалегідь визначений проміжок часу. Переважно, засоби керування виконані з можливістю регулювання швидкості обертання, щонайменше, одного насоса відкачувального насосного пристрою для керування швидкістю створення розрідження в камері. Переважно, засоби керування містять контролер насоса для керування живленням, що подається на електродвигун з регульованою швидкістю обертання насоса, і, таким чином, швидкістю обертання насоса. Переважно, контролер насоса виконаний з можливістю зміни частоти живлення, що подається до електродвигуна для регулювання швидкості насоса, наприклад, шляхом передачі команди на інвертор для зміни частоти живлення, що подається таким чином на електродвигун. Однак контролер може бути виконаний з можливістю регулювання іншого параметра джерела живлення, такого як величина (або амплітуда) напруги або струму живлення, що подається до електродвигуна. У тому випадку, коли зниження частоти живлення, що подається до електродвигуна, або зниження іншого параметра джерела живлення не спричиняє зниження рівня поверхні шлаку, частоту живлення, що подається до електродвигуна, або згаданий інший параметр можна знизити до нуля так, щоб насос був фактично вимкнений, таким чином, значно знижується швидкість створення розрідження в камері. Тому, засоби керування можуть бути виконані з можливістю відключення, щонайменше, одного насоса відкачувального насосного пристрою залежно від згаданого сигналу. Тому, згідно з другим варіантом даного винаходу забезпечують пристрій для дегазації розплавленого металу, при цьому пристрій містить камеру для розміщення приймача, який містить розплавлений метал і шар шлаку над розплавленим металом, відкачувальний насосний пристрій вакуумування для створення розрідження в камері, датчик для виведення сигналу, що показує рівень поверхні шлаку, і засоби керування для відключення, щонайменше, одного насоса відкачувального насосного пристрою залежно від сигналу для того, щоб перешкоджати витіканню шлаку з приймача. В одному варіанті, контролер насоса одержує вихідні сигнали безпосередньо від датчика і використовує сигнали для керування енергією, що подається до електродвигуна. В іншому варіанті, контролер системи одержує вихідні сигнали від датчика, використовує сигнали для визначення заданої швидкості насоса і повідомляє контролеру насоса задану швидкість, наприклад, повідомляючи контролеру насоса частоту живлення, яка буде подана до електродвигуна. Функції, що виконуються, для визначення заданої швидкості можуть, таким чином, забезпечуватися програмним забезпеченням, що зберігається на одному контролері системи, причому контролер насоса на основі заданої швидкості, одержаної від контролера системи, встановлює швидкість насоса. У третьому варіанті даного винаходу забезпечують спосіб дегазації розплавленого металу, при 86288 6 цьому спосіб включає етапи розташування приймача, який містить розплавлений метал і шар шлаку над розплавленим металом в камері, створення розрідження в камері, одержання від датчика сигналу, що показує рівень поверхні шлаку, і використання сигналу для керування швидкістю створення розрідження в камері для того, щоб перешкоджати витіканню шлаку з приймача. У четвертому варіанті даного винаходу забезпечують спосіб дегазації розплавленого металу, при цьому спосіб включає етапи розташування приймача, який містить розплавлений метал і шар шлаку над розплавленим металом в камері, створення розрідження в камері, одержання від датчика сигналу, що показує рівень поверхні шлаку, і вимкнення, щонайменше, одного насоса, що використовується для створення розрідження в камері залежно від сигналу для того, щоб перешкоджати перетіканню шлаку з приймача. Ознаки, описані вище застосовно до першого варіанту винаходу, однаково застосовні до варіантів з другого по четвертий, і навпаки. Переважні ознаки даного винаходу будуть тепер описані з посиланням на супроводжуючі креслення, на яких: Фіг.1 являє собою перший варіант здійснення пристрою вакуумування; Фіг.2 являє собою приклад пристрою вакуумування для створення розрідження в камері дегазації пристрою дегазації, показаного на Фіг.1; Фіг.3 являє собою контролер насоса для приведення в дію електродвигуна бустерного насоса насосного пристрою, показаного на Фіг.2; Фіг.4 являє собою з'єднання контролерів бустерних насосів, показаних на Фіг.2, з контролером системи; і Фіг.5 являє собою другий варіант здійснення пристрою вакуумування сталі. На Фіг.1 показаний пристрій для дегазації розплавленого металу, наприклад, розплавленої сталі, який містить камеру 10 дегазації для розміщення приймача або «ковша» 12, який містить розплавлений метал 14 і шар шлаку 16 на поверхні розплавленого металу 14. Камера 10 закрита кришкою 18, на якій встановлений датчик 20 для контролю рівня верхньої поверхні 22 шлаку 16 в ковші 12. У показаному прикладі датчик 20 являє собою локаційний приймач-передавач. Датчик 20 з'єднаний з контролером 24 для керування відкачувальним насосним пристроєм 26, з'єднаним з випуском 28 камери 10. На Фіг.2 показаний приклад пристрою 26 вакуумування, який містить множину подібних, бустерних насосів 30, з'єднаних паралельно, і відкачувального насоса 32. Кожний бустерний насос 30 має впуск, з'єднаний з відповідним випуском 34 від впускного трубопроводу 36, і випуск, з'єднаний з відповідним впуском 38 випускного трубопроводу 40. Впуск 42 впускного трубопроводу 36 з'єднаний з випуском 28 камери 10, а випуск 44 випускного трубопроводу 40 з'єднаний з впуском відкачувального насоса 32. У той час як в показаній насосній системі передбачено три бустерних насоси, з'єднаних паралельно, може бути передбачена будьяка кількість бустерних насосів залежно від вимог 7 до насосного обладнання камери. Аналогічним чином там, де передбачена відносно велика кількість бустерних насосів, може бути передбачено два або більше відкачувальних насоса, з'єднаних паралельно. Додатковий ряд або ряди бустерних насосів, з'єднаних подібним чином паралельно, можуть бути передбачені, при необхідності, між першим рядом бустерних насосів і відкачувальних насосів. На Фіг.3 кожний бустерний насос 30 містить механізм 46 накачування, що приводиться в дію електродвигуном 48 з регульованою швидкістю обертання. Бустерні насоси звичайно включають в себе, по суті, механізм 46 для сухого відкачування (або безмасляний), але, як правило, також включають в себе деякі елементи, такі як опори і зубчасті передачі, для приведення в дію механізму 46 накачування, який для того, щоб бути ефективним, вимагає змащування. Прикладами таких безмасляних насосів є вакуумний насос Рутса, насос Норзея (або «зубчастий») і черв'ячні насоси. Безмасляні насоси, що включають механізми Рутса і/або Норзея, є звичайно багатоступінчастими, поршневими насосами, що використовують ротори, які знаходяться у взаємному зачепленні в кожній насосній камері. Ротори розташовані на валах, що обертаються в протилежному напрямку, і можуть мати ту ж саму конфігурацію в кожній камері, або конфігурація може змінюватися від камери до камери. Відкачувальний насос 32 може мати або механізм, подібний до механізму накачування бустерних насосів 30 або інший механізм накачування. Наприклад, відкачувальний насос 32 може бути відцентровим, лопатевим насосом, роторним, поршневим насосом, насосом Норзея або «зубчастим» насосом, або черв'ячним насосом. Електродвигун 48 бустерного насоса 30 може бути будь-яким підходящим електродвигуном для приведення в дію механізму 46 накачування. У переважному варіанті здійснення, електродвигун 48 містить трифазний електродвигун змінного струму, хоча може використовуватися інша технологія (наприклад, однофазний електродвигун змінного струму, електродвигун постійного струму, безщітковий електродвигун з постійним магнітом або релюктанцний електродвигун, що перемикається). Контролер 50 насоса приводить в дію електродвигун 48. У цьому варіанті здійснення, контролер 50 насоса містить інвертор 52 для зміни частоти живлення, що подається на електродвигун 48 змінного струму. Частота змінюється інвертором 52 у відповідь на команди, одержані від контролера 54 інвертора. Змінюючи частоту живлення, що подається на електродвигун, кутова швидкість механізму 46 накачування, яка надалі називається швидкістю насоса або швидкістю накачування, може бути змінена. Блок 56 живлення подає живлення до інвертора 52 і контролера 54 інвертора. Інтерфейс 58 також передбачений для того, щоб дозволити контролеру насоса 50 одержувати сигнали від зовнішнього джерела для використання при керуванні насосом 30 і виводити сигнали, що стосуються поточного стану насоса 30, наприклад, 86288 8 поточної швидкості насоса, споживання живлення насосом, і температури насоса. У варіанті здійснення, показаному на Фіг.4, контролери 50 насоса кожного з бустерних насосів 30 з'єднані з контролером 24. Як показано, кабелі 60 можуть бути передбачені для з'єднання інтерфейсів 58 контролерів 50 насоса з інтерфейсом контролера 24. Як альтернатива контролери 50 насоса можуть бути з'єднані з контролером 24 по локальній обчислювальній мережі. Шляхом використання відкачувального насосного пристрою 26 проводять створення розрідження в камері 10 дегазації для того, щоб видаляти гази з розплавленого металу 14, який міститься в ковші 12. Газ затягується з камери 10 у впускний трубопровід 36, з якого газ проходить через бустерні насоси 30 у випускний трубопровід 40. Газ затягується з випускного трубопроводу 40 відкачувальним насосом 32, який випускає газ, затягнутий з камери 10 при або приблизно при атмосферному тиску. При розрідженні в камері 10 рівень поверхні 22 шлаку 16 контролюють з використанням датчика 20. Датчик спрямовує локаційний промінь до шлаку 16. Промінь спочатку відбивається від поверхні 22 шлаку 16, а потім від поверхні 62 розділу між розплавленим металом 14 і шлаком 16. У результаті датчик 20 одержує першу відносно слабку луну сигналу після першого періоду часу при відбитті локаційного променя поверхнею 22 шлаку 16 і другу відносно сильну луну після другого періоду часу при відбитті локаційного променя від поверхні розділу 62 між розплавленим металом 14 і шлаком 16. Відстань d1 між датчиком 20 і поверхнею 22 шлаку 16 пропорційна тривалості першого періоду часу. У той час як відстань d2 між датчиком 20 і верхом ковша 12 є постійною, відстань d3 між верхом ковша 12 і поверхнею 22 шлаку 16 є, таким чином, також пропорційною тривалості першого періоду часу. Датчик 20 виводить на контролер 24 сигнал, що включає, серед іншого, довжину або індикацію довжини першого періоду часу. Контролер 24 використовує дані, які містяться в сигналах для контролю і визначення поточного рівня поверхні 22 шлаку 16 і швидкості зміни рівня поверхні 22, наприклад, в зв'язку із спіненням шлаку 16 при дегазації. Ці параметри використовуються контролером 24 для керування швидкістю створення розрідження в камері 10, яка в свою чергу визначає швидкість дегазації розплавленого металу 14, і, таким чином, ступінь спінювання шлаку 16. У цьому варіанті здійснення, контролер 24 змінює швидкості бустерних насосів 30 для керування швидкістю створення розрідження в камері 10, видаючи команду на контролери 50 насоса для зміни швидкості бустерних насосів 30. Наприклад, задана швидкість для бустерних насосів 30 може бути передана на контролери 50 насоса в формі заданої частоти для інверторів 52. У відповідь на команду, одержану від контролера 24, кожний контролер 50 насоса керує частотою живлення, що подається до електродвигуна згідно із заданою частотою, забезпеченою контролером 24. Ця задана частота може бути нулем, так що бустерні насоси 30 вимикаються. Як альтернатива, задана 9 частота може бути прогресивно зменшена до нуля залежно від даних, які містяться в сигналах, одержаних від датчика 20. У результаті швидке збільшення рівня поверхні 22 шлаку 16 при спіненні може бути швидко виявлене і усунене відповідним автоматичним, швидким пониженням швидкості створення розрідження в камері 10, тим самим знижуючи швидкість, при якій утворюється газ на поверхні розділу 62 між розплавленим металом 14 і шлаком 16, і, отже, запобігаючи витіканню шлаку 16 з ковша 12. Як тільки рівень поверхні шлаку 22 знижений, швидкість створення розрідження в камері 10 може бути знову збільшена, видаючи відповідну 86288 10 команду на контролери 50 насоса для збільшення швидкості підкачувальних насосів 30. У варіанті здійснення, показаному на Фіг.1-4, контролер 24 системи визначає задану швидкість для бустерних насосів 30 і повідомляє задану швидкість бустерним насосам 30. У варіанті здійснення, показаному на Фіг.5, датчик 20 з'єднаний безпосередньо з насосним пристроєм 26. У цьому варіанті здійснення, сигнали, видані датчиком 20, одержують безпосередньо контролери 50 насоса, кожний з яких зберігає функціональні можливості контролера 24 першого варіанту для керування швидкістю його відповідного механізму накачування. 11 Комп’ютерна верстка Л.Литвиненко 86288 Підписне 12 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and method for degasification of melted metal
Автори англійськоюBruse Simon Harold
Назва патенту російськоюУстройство и способ дегазации расплавленного металла
Автори російськоюБрюс Саймон Харольд
МПК / Мітки
МПК: C21C 7/10
Мітки: спосіб, металу, розплавленого, дегазації, пристрій
Код посилання
<a href="https://ua.patents.su/6-86288-pristrijj-ta-sposib-degazaci-rozplavlenogo-metalu.html" target="_blank" rel="follow" title="База патентів України">Пристрій та спосіб дегазації розплавленого металу</a>
Установка для безперервного відливання стрічки металу ( варіанти), електромагнітний пристрій для запобігання витіканню розплаву металу і спосіб запобігання за допомогою магніту витіканню розплавленого металу
Номер патенту: 27804
Опубліковано: 16.10.2000
Автор: Гербер Ховард
МПК: B22D 27/02, B22D 11/06
Мітки: варіанти, електромагнітний, витіканню, розплаву, пристрій, запобігання, спосіб, стрічки, розплавленого, магніту, безперервного, допомогою, відливання, металу, установка
Текст:
...пластин между ребрами; Фиг. 13 - разрез по линии 13-13 на фиг. 12; Фиг. 14 - разрез по линии 14-14 на фиг. 12; Фиг. 15 - вид в перспективе другого варианта устройства, используемого в другом варианте установки; Фиг. 16 - вид сверху с частичным разрезом другого варианта установки с устройством, показанный на фиг. 15; Фиг. 17 - разрез по линии 17-17 на фиг. 15 с непоказанной задней частью катушки; Фиг. 18 - увеличенный вид участка фиг 16....
Пристрій для магнітного утримання розплавленого металу (варіанти) та спосіб магнітного утримання розплавленого металу (варіанти)
Номер патенту: 26748
Опубліковано: 12.11.1999
Автор: ПРЕГ Вольтер Ф.
МПК: B22D 27/02, B22D 11/06
Мітки: спосіб, пристрій, утримання, варіанти, розплавленого, металу, магнітного
Формула / Реферат:
1. Устройство магнитного удержания расплавленного металла от утечки через открытую сторону вертикально простирающегося зазора между двумя расположенными в горизонтальной плоскости элементами, между которыми находится расплавленный металл, отличающееся тем, что содержит электропроводную катушку, соединенную с магнитным сердечником, полюса магнитного сердечника размещены в горизонтальной плоскости с промежутком со стороны открытого зазора, а...
Спосіб та пристрій для дозування потоку при безперервному литті розплавленого металу
Номер патенту: 73977
Опубліковано: 17.10.2005
Автори: Доррікотт Джеймс Д., Ксу Донг, Хісліп Лоуренс Дж.
МПК: B22D 41/22
Мітки: металу, спосіб, безперервному, дозування, розплавленого, потоку, литті, пристрій
Формула / Реферат:
1. Пристрій для дозування потоку при безперервному литті розплавленого металу, що містить дозувальний шибер, який включає:верхню дошку, що має отвір першого проточного каналу з вхідним отвором, який має вісь вхідного отвору, і вихідним отвором, що має вісь вихідного отвору; та дросельну дошку, яка контактує з можливістю ковзання з верхньою дошкою і пристосована для селективного отримання потоку з верхньої дошки, який відрізняється тим,...
Спосіб та пристрій для магнітного утримання розплавленого металу
Номер патенту: 26914
Опубліковано: 29.12.1999
Автори: Гербер Л. Ховард, Гесс Т. Річард
МПК: B22D 11/06
Мітки: металу, магнітного, розплавленого, спосіб, утримання, пристрій
Текст:
...описана ниже, защищающей катушку. Рассеяние магнитного поля в направлении в сторону от открытой стороны зазора предотвращается за счет ограниче45 ния магнитного поля, создаваемого катушкой, в основном открытой стороной зазора. Это достигается частично за счет использования немагнитного электрического проводника, находящегося в элект50 ропроводящей связи с катушкой, обращенного к открытой стороне зазора, и который находится достаточно близко...
Спосіб прямого лиття розплавленого металу в безперервну стрічку та пристрій для його здійснення
Номер патенту: 32530
Опубліковано: 15.02.2001
Автори: Лав Девід Брайн, Шваха Карл, Наумен Джон Дана
МПК: B22D 11/06
Мітки: металу, спосіб, прямого, лиття, безперервну, стрічку, пристрій, розплавленого, здійснення
Текст:
...в непосредственной близости от поверхности 24 питья Подача расплавленного металла 22 к разливочному резервуару 18 может быть осуществлена любыми известными способами и устройствами, например, при помощи резервуаров, промежуточных разливочных ковшей или насосов расплавленного металла Поверхность 24 литья может представлять собой отдельное зубчатое колесо или одно из сдвоенных зубчатых колес либо валиков. Состав этой поверхности может быть...
Попередній патент: Пристрій маніпулювання кришками електролізера для виробництва алюмінію електролізом
Наступний патент: Склад для надання жиронепроникності волокнистому матеріалу
Випадковий патент: Барабанна сушарка