Пристрій маніпулювання кришками електролізера для виробництва алюмінію електролізом
Формула / Реферат
1. Пристрій (100) маніпулювання кришками (33) електролізера (2) для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що він містить:
- пристрій (110) позиціонування, який містить орган (101) вертикального напрямку, рухому опору (120), встановлену на органі (101) вертикального напрямку з можливістю переміщення при використанні щонайменше у вертикальному напрямку, шарнірний рукав (130), встановлений на пересувній опорі (120), перше шасі (140), встановлене на шарнірному рукаві (130) з можливістю повороту при використанні навколо по суті горизонтальної першої осі А обертання, причому згаданий шарнірний рукав (130) здатний щонайменше віддаляти і наближати перше шасі (140) від/до пересувної опори (120), двигун (141) для здійснення повороту першого шасі (140) навколо згаданої першої осі А обертання, друге шасі (150), встановлене на першому шасі (140) з можливістю переміщення вздовж певної першої осі В поступального руху, яка при використанні є по суті горизонтальною, і засоби (151-155) переміщення другого шасі (150) вздовж згаданої першої осі В поступального руху;
- систему (160) захоплення кришок, яка закріплена на другому шасі (150) і містить певний комплект захоплювальних органів (161), призначених для захоплення певного комплекту кришок (33) в певному числі точок кріплення.
2. Пристрій маніпулювання (100) за пунктом 1, який відрізняється тим, що орган (101) вертикального напрямку містить нерухомий елемент (102) і щонайменше один рухомий елемент (103, 103'), і тим, що рухома опора (120) встановлена на згаданому або одному із згаданих рухомих елементів (103, 103').
3. Пристрій маніпулювання (100) за пунктом 2, який відрізняється тим, що орган (101) вертикального напрямку вибраний із телескопічних стріл.
4. Пристрій маніпулювання (100) за будь-яким з пунктів 1-3, який відрізняється тим, що засоби (151-155) переміщення другого шасі (150) містять двигун (151), закріплений на першому шасі (140) і обладнаний шестірнею (152), зубчату рейку (153), яка жорстко зв'язана з другим шасі (150) і з якою зачіпляється шестірня (152), напрямні (154) і опорні підшипники (155), встановлені ковзними по напрямних (154).
5. Пристрій маніпулювання (100) за будь-яким з пунктів 1-4, який відрізняється тим, що число точок кріплення перевищує або дорівнює трьом на кришку, і тим, що згадані точки розташовані так, щоб утворювати площину.
6. Пристрій маніпулювання (100) за будь-яким з пунктів 1-5, який відрізняється тим, що захоплювальні органи (161) являють собою присоски, які приводяться в дію пневматичною системою.
7. Пристрій маніпулювання (100) за пунктом 6, який відрізняється тим, що система (160) захоплення додатково містить засоби продування, призначені для очищення згаданих точок кріплення на згаданій або згаданих кришках перед приведенням в дію згаданих присосків.
8. Пристрій маніпулювання (100) за будь-яким з пунктів 1-7, який відрізняється тим, що система (160) захоплення містить шарнірне шасі (162), яке містить нерухому раму (169), закріплену на другому шасі (150), щонайменше одну шарнірну раму (163, 163'), закріплену на нерухомій рамі (169) за допомогою щонайменше одного шарніра (164, 164') з можливістю повороту навколо осі (D, D'), яка при використанні є по суті вертикальною, і, для кожної шарнірної рами (163, 163'), привід (165, 165'), призначений для здійснення повороту згаданої або кожної шарнірної рами (163, 163') навколо згаданої осі.
9. Пристрій маніпулювання (100) за пунктом 8, який відрізняється тим, що шарнірне шасі (162) містить дві шарнірні рами (163, 163'), розташовані з утворенням тріади.
10. Пристрій маніпулювання (100) за будь-яким з пунктів 8 і 9, який відрізняється тим, що шарнірне шасі (162) встановлене на другому шасі (150) з можливістю переміщення вздовж другої певної осі В' поступального руху, яка при використанні є по суті горизонтальною і яка звичайно є паралельною згаданій першій певній осі В поступального руху, і тим, що пристрій (111) позиціонування кришок містить засоби (166, 167, 168) переміщення шарнірного шасі (162) вздовж другої осі В' поступального руху.
11. Пристрій маніпулювання (100) за пунктом 10, який відрізняється тим, що згадані засоби (166, 167, 168) переміщення шарнірного шасі (162) містять напрямний привід.
12. Пристрій маніпулювання (100) за пунктом 10 або 11, який відрізняється тим, що згадані засоби (166, 167, 168) переміщення шарнірного шасі (162) містять напрямні (166), встановлені на другому шасі (150), опорні підшипники (167), жорстко зв'язані з шарнірним шасі (162) і встановлені на цих напрямних з можливістю ковзання вздовж них, і привід (168).
13. Пристрій маніпулювання (100) за будь-яким з пунктів 1-12, який відрізняється тим, що він додатково містить засіб (180, 180') очищення, встановлений на другому шарнірному рукаві (170).
14. Пристрій маніпулювання (100) за пунктом 13, який відрізняється тим, що засіб (180, 180') очищення вибраний із щіток, скребачок і/або засобів продування.
15. Пристрій маніпулювання (100) за будь-яким з пунктів 1-14, який відрізняється тим, що він обладнаний комп'ютерною системою керування.
16. Пристрій маніпулювання (100) за пунктом 15, який відрізняється тим, що він містить кодуючий пристрій і систему виявлення, здатну виявляти присутність кришок, орієнтацію кришок, положення кришок і/або присутність поверхневих малюнків і/або певних елементів на кришках.
17. Пристрій маніпулювання (100) за пунктом 16, який відрізняється тим, що система виявлення містить щонайменше одну систему телеметрії.
18. Пристрій маніпулювання (100) за пунктом 17, який відрізняється тим, що система телеметрії являє собою лазерний далекомір.
19. Пристрій маніпулювання (100) за будь-яким з пунктів 1-18, який відрізняється тим, що він містить систему телеметрії, виконану з можливістю вимірювання відстані між щонайменше однією певною точкою на пристрої маніпулювання (100) і точкою на електролізері.
20. Пристрій маніпулювання (100) за пунктом 19, який відрізняється тим, що система телеметрії вибрана із далекомірів, аналізаторів просторової конфігурації і камер, забезпечених аналізатором зображення.
21. Машина обслуговування (6) серії електролізерів (2) для виробництва алюмінію електролізом в розплаві, які містять множину кришок (33), яка відрізняється тим, що вона містить щонайменше один пристрій (100) маніпулювання кришками за будь-яким з пунктів 1-20.
22. Рухомий агрегат, здатний переміщатися по електролізному цеху заводу по виробництву алюмінію електролізом в розплаві, який відрізняється тим, що він містить щонайменше один пристрій (100) маніпулювання кришками за будь-яким з пунктів 1-20.
23. Рухомий агрегат за пунктом 22, який відрізняється тим, що він обладнаний системою керування, яка стежить за тим, щоб згаданий пристрій позиціонування знаходився в певному положенні відносно підлягаючої маніпулюванню кришки або множини кришок, причому згадане певне положення задане відстанню ∆Х у напрямку X великої сторони електролізера, відстанню ∆Y у напрямку Y малої сторони електролізера і різницею висоти ∆Z між характеристичною точкою пристрою маніпулювання і характеристичною точкою множини підлягаючих маніпулюванню кришок.
24. Рухомий агрегат за пунктом 22 або 23, який відрізняється тим, що забезпечений приводом, який дозволяє розміщувати згаданий пристрій позиціонування таким чином, щоб вісь В поступального руху другого шасі (150) була по суті паралельною напрямку X великої сторони електролізера.
25. Рухомий агрегат за будь-яким з пунктів 22-24, який відрізняється тим, що він являє собою самохідний транспортний засіб, здатний переміщатися в по суті горизонтальній площині, і тим, що він необов'язково забезпечений приводом, який переміщує згаданий пристрій позиціонування у вертикальному напрямку.
26. Рухомий агрегат за будь-яким з пунктів 22-24, який відрізняється тим, що він являє собою агрегат обслуговування (4) заводу по виробництву алюмінію електролізом в розплаві, який містить мостовий кран (5) і щонайменше одну машину обслуговування (6) за пунктом 21.
27. Рухомий агрегат за пунктом 26, який відрізняється тим, що згаданий мостовий кран переміщається у напрямку Y малої сторони електролізера, і тим, що згадана машина обслуговування зв'язана з візком, що переміщається у напрямку X великої сторони електролізера.
28. Спосіб зняття щонайменше однієї кришки електролізера для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що:
а) використовують щонайменше один рухомий агрегат за будь-яким з пунктів 22-27;
b) розміщують згаданий рухомий агрегат таким чином, щоб згаданий пристрій позиціонування знаходився в певному початковому положенні, при цьому вісь В поступального руху другого шасі (150) є по суті паралельною напрямку X;
c) маневрують шарнірним рукавом (130), першим шасі (140) і/або другим шасі (150), а також, необов'язково, системою захоплення (160) таким чином, щоб встановити захоплювальні органи системи захоплення в положення захоплення згаданих кришок;
d) приводять в дію захоплювальні органи таким чином, щоб захопити згадані кришки;
e) маневрують згаданим шарнірним рукавом, згаданим першим шасі і/або згаданим другим шасі, а також, необов'язково, згаданою системою захоплення таким чином, щоб зняти згадані кришки і транспортувати їх в певну зону складування.
29. Спосіб за пунктом 28, який відрізняється тим, що в ньому використовують пристрій позиціонування з шарнірним рукавом (130), що містить нерухомий елемент (131), жорстко зв'язаний з пересувною опорою (120), і рухомий елемент (132), перший кінець якого закріплений на нерухомому елементі з можливістю повороту навколо осі С, по суті паралельної осям А і В, а другий кінець якого закріплений на першому шасі (140), дозволяючи останньому повертатися навколо згаданої осі А, таким чином, щоб, комбінуючи обертання рухомого елемента навколо осі С і обертання першого шасі навколо осі А, можна було надавати загалом плоскої траєкторії в площині, по суті перпендикулярній напрямку X великої сторони електролізера.
30. Спосіб за пунктом 29, який відрізняється тим, що в ньому надають другому шасі коливального руху невеликої амплітуди в напрямку X, що дозволяє полегшити витягання кришок.
31. Спосіб встановлення щонайменше однієї кришки електролізера для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що:
а) використовують щонайменше один рухомий агрегат за будь-яким з пунктів 22-27;
b) переміщують згаданий рухомий агрегат до певної зони складування кришок і приводять в дію захоплювальний пристрій так, щоб захопити згадані кришки;
c) розміщують згаданий рухомий агрегат із згаданими кришками таким чином, щоб згаданий пристрій позиціонування знаходився в певному початковому положенні, при цьому вісь В поступального руху другого шасі є по суті паралельною напрямку X;
d) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб встановити захоплювальні органи системи захоплення в положення установки згаданих кришок;
e) приводять в дію захоплювальні органи таким чином, щоб звільнити згадані кришки;
f) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб віддалити згаданий пристрій позиціонування від згаданих кришок.
32. Спосіб заміни анодів в електролізері, який відрізняється тим, що він містить етап, на якому щонайменше одну кришку, яка знаходиться поблизу згаданого анода, знімають згідно зі способом знімання кришки за будь-яким з пунктів 28-30, і етап, на якому, після заміни згаданого анода, згадану щонайменше одну кришку встановлюють на місце згідно з способом встановлення кришки за пунктом 31.
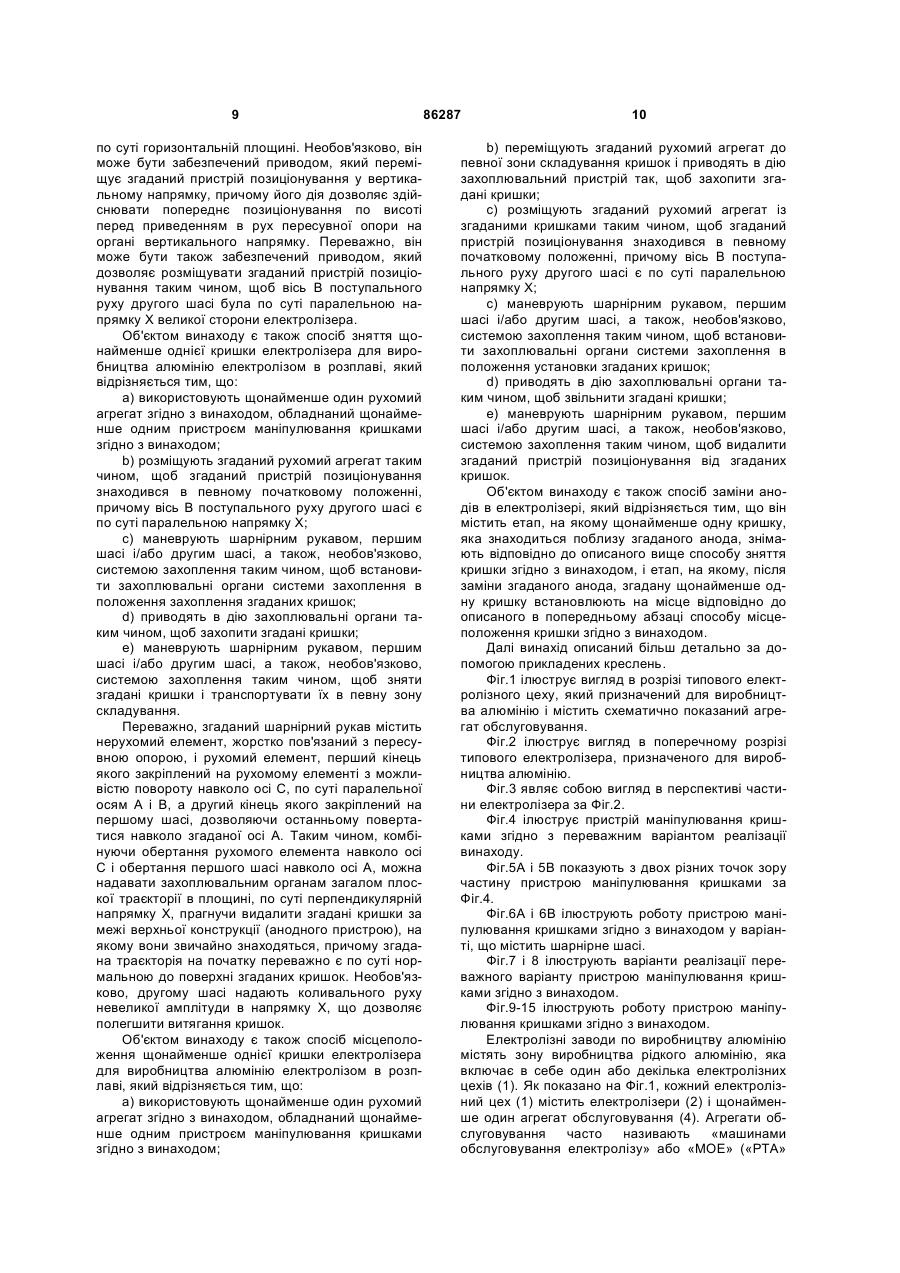
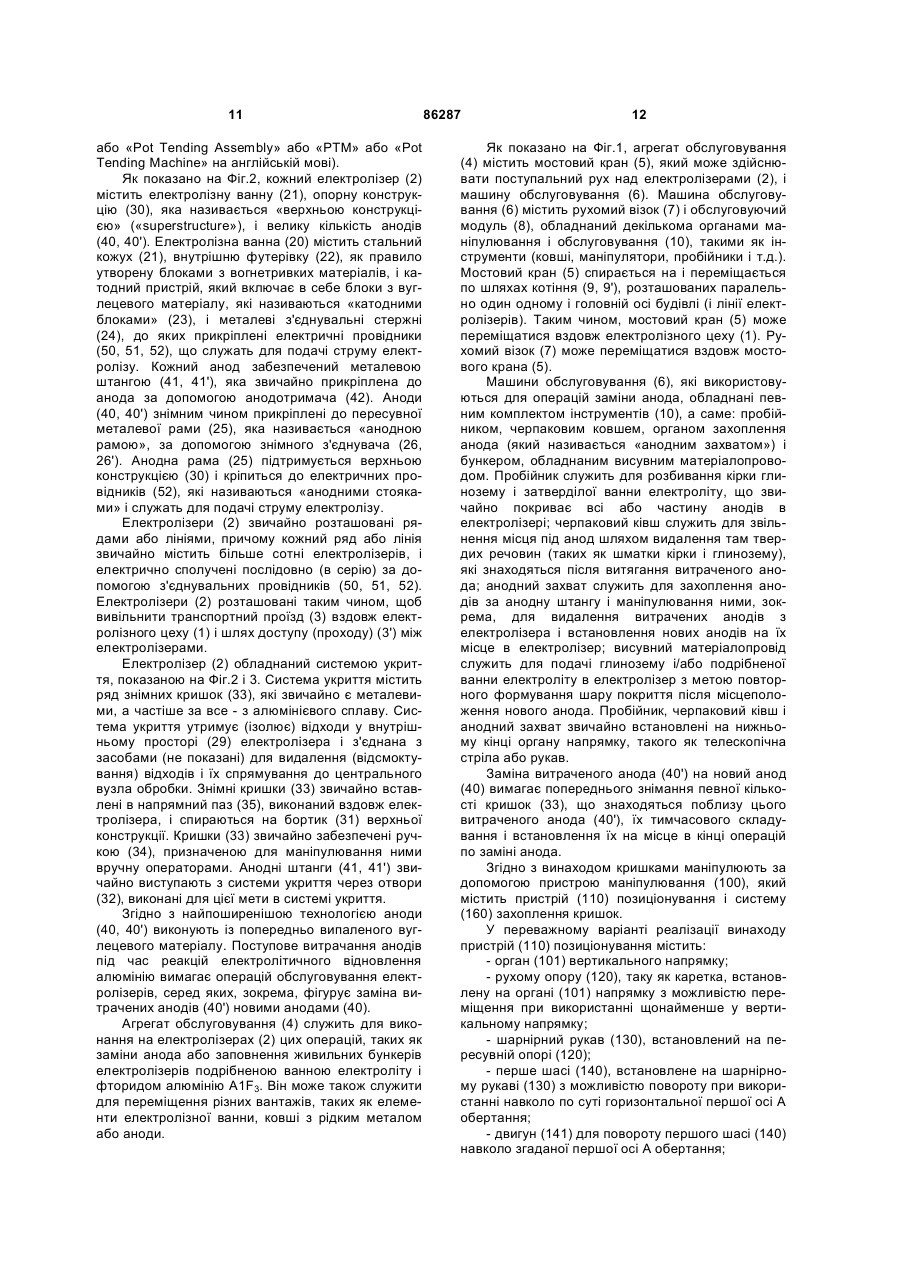
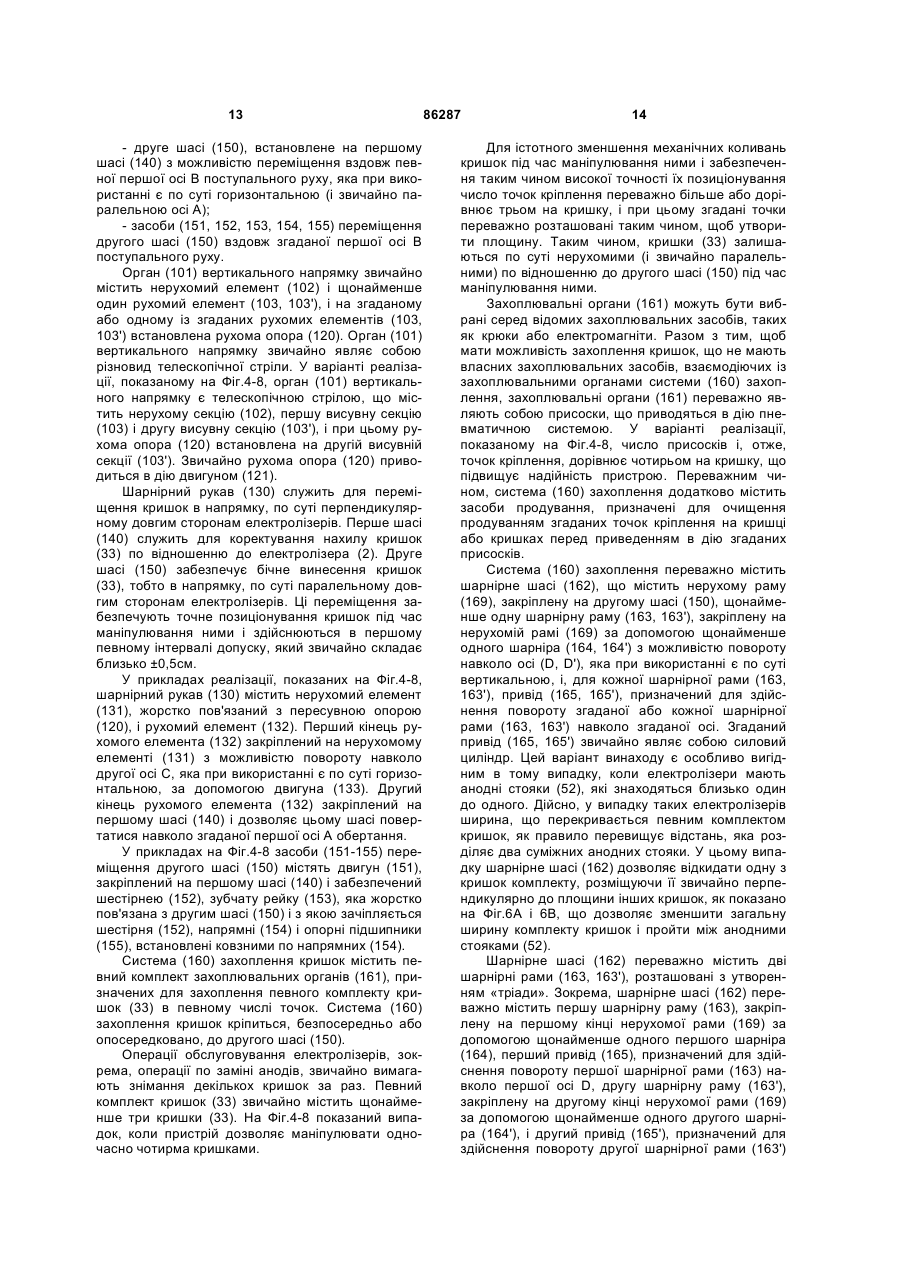
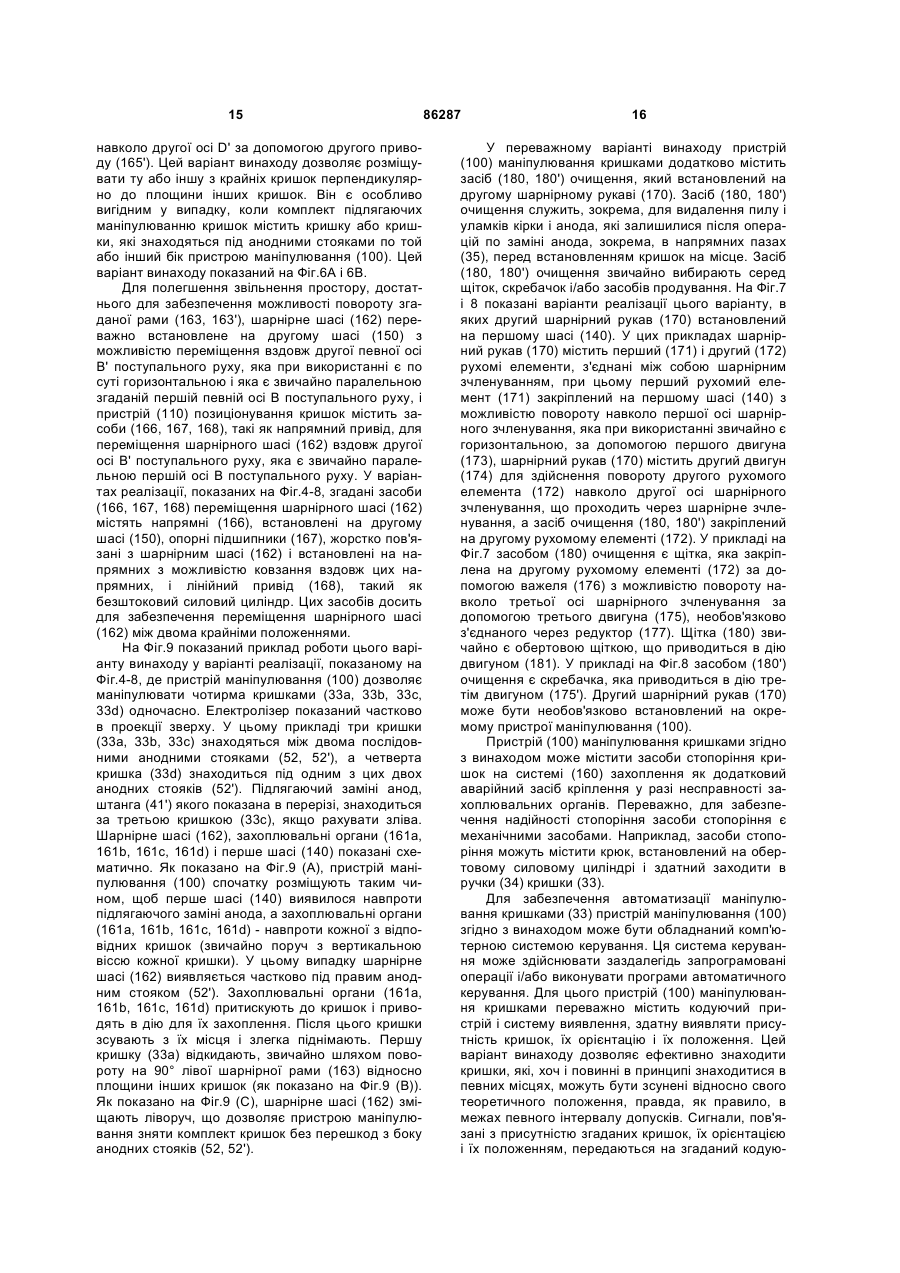
Текст
1. Пристрій (100) маніпулювання кришками (33) електролізера (2) для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що він містить: - пристрій (110) позиціонування, який містить орган (101) вертикального напрямку, рухому опору (120), встановлену на органі (101) вертикального напрямку з можливістю переміщення при використанні щонайменше у вертикальному напрямку, шарнірний рукав (130), встановлений на пересувній опорі (120), перше шасі (140), встановлене на шарнірному рукаві (130) з можливістю повороту при використанні навколо по суті горизонтальної першої осі А обертання, причому згаданий шарнірний рукав (130) здатний щонайменше віддаляти і наближати перше шасі (140) від/до пересувної опори (120), двигун (141) для здійснення повороту першого шасі (140) навколо згаданої першої осі А обертання, друге шасі (150), встановлене на першому шасі (140) з можливістю переміщення вздовж певної першої осі В поступального руху, яка при використанні є по суті горизонтальною, і засоби (151-155) переміщення другого шасі (150) вздовж згаданої першої осі В поступального руху; - систему (160) захоплення кришок, яка закріплена на другому шасі (150) і містить певний комплект захоплювальних органів (161), призначених для захоплення певного комплекту кришок (33) в певному числі точок кріплення. 2. Пристрій маніпулювання (100) за пунктом 1, який відрізняється тим, що орган (101) вертикального напрямку містить нерухомий елемент (102) і щонайменше один рухомий елемент (103, 103'), і 2 (19) 1 3 містить дві шарнірні рами (163, 163'), розташовані з утворенням тріади. 10. Пристрій маніпулювання (100) за будь-яким з пунктів 8 і 9, який відрізняється тим, що шарнірне шасі (162) встановлене на другому шасі (150) з можливістю переміщення вздовж другої певної осі В' поступального руху, яка при використанні є по суті горизонтальною і яка звичайно є паралельною згаданій першій певній осі В поступального руху, і тим, що пристрій (111) позиціонування кришок містить засоби (166, 167, 168) переміщення шарнірного шасі (162) вздовж другої осі В' поступального руху. 11. Пристрій маніпулювання (100) за пунктом 10, який відрізняється тим, що згадані засоби (166, 167, 168) переміщення шарнірного шасі (162) містять напрямний привід. 12. Пристрій маніпулювання (100) за пунктом 10 або 11, який відрізняється тим, що згадані засоби (166, 167, 168) переміщення шарнірного шасі (162) містять напрямні (166), встановлені на другому шасі (150), опорні підшипники (167), жорстко зв'язані з шарнірним шасі (162) і встановлені на цих напрямних з можливістю ковзання вздовж них, і привід (168). 13. Пристрій маніпулювання (100) за будь-яким з пунктів 1-12, який відрізняється тим, що він додатково містить засіб (180, 180') очищення, встановлений на другому шарнірному рукаві (170). 14. Пристрій маніпулювання (100) за пунктом 13, який відрізняється тим, що засіб (180, 180') очищення вибраний із щіток, скребачок і/або засобів продування. 15. Пристрій маніпулювання (100) за будь-яким з пунктів 1-14, який відрізняється тим, що він обладнаний комп'ютерною системою керування. 16. Пристрій маніпулювання (100) за пунктом 15, який відрізняється тим, що він містить кодуючий пристрій і систему виявлення, здатну виявляти присутність кришок, орієнтацію кришок, положення кришок і/або присутність поверхневих малюнків і/або певних елементів на кришках. 17. Пристрій маніпулювання (100) за пунктом 16, який відрізняється тим, що система виявлення містить щонайменше одну систему телеметрії. 18. Пристрій маніпулювання (100) за пунктом 17, який відрізняється тим, що система телеметрії являє собою лазерний далекомір. 19. Пристрій маніпулювання (100) за будь-яким з пунктів 1-18, який відрізняється тим, що він містить систему телеметрії, виконану з можливістю вимірювання відстані між щонайменше однією певною точкою на пристрої маніпулювання (100) і точкою на електролізері. 20. Пристрій маніпулювання (100) за пунктом 19, який відрізняється тим, що система телеметрії вибрана із далекомірів, аналізаторів просторової конфігурації і камер, забезпечених аналізатором зображення. 21. Машина обслуговування (6) серії електролізерів (2) для виробництва алюмінію електролізом в розплаві, які містять множину кришок (33), яка відрізняється тим, що вона містить щонайменше один пристрій (100) маніпулювання кришками за будь-яким з пунктів 1-20. 86287 4 22. Рухомий агрегат, здатний переміщатися по електролізному цеху заводу по виробництву алюмінію електролізом в розплаві, який відрізняється тим, що він містить щонайменше один пристрій (100) маніпулювання кришками за будь-яким з пунктів 1-20. 23. Рухомий агрегат за пунктом 22, який відрізняється тим, що він обладнаний системою керування, яка стежить за тим, щоб згаданий пристрій позиціонування знаходився в певному положенні відносно підлягаючої маніпулюванню кришки або множини кришок, причому згадане певне положення задане відстанню ∆Х у напрямку X великої сторони електролізера, відстанню ∆Y у напрямку Y малої сторони електролізера і різницею висоти ∆Z між характеристичною точкою пристрою маніпулювання і характеристичною точкою множини підлягаючих маніпулюванню кришок. 24. Рухомий агрегат за пунктом 22 або 23, який відрізняється тим, що забезпечений приводом, який дозволяє розміщувати згаданий пристрій позиціонування таким чином, щоб вісь В поступального руху другого шасі (150) була по суті паралельною напрямку X великої сторони електролізера. 25. Рухомий агрегат за будь-яким з пунктів 22-24, який відрізняється тим, що він являє собою самохідний транспортний засіб, здатний переміщатися в по суті горизонтальній площині, і тим, що він необов'язково забезпечений приводом, який переміщує згаданий пристрій позиціонування у вертикальному напрямку. 26. Рухомий агрегат за будь-яким з пунктів 22-24, який відрізняється тим, що він являє собою агрегат обслуговування (4) заводу по виробництву алюмінію електролізом в розплаві, який містить мостовий кран (5) і щонайменше одну машину обслуговування (6) за пунктом 21. 27. Рухомий агрегат за пунктом 26, який відрізняється тим, що згаданий мостовий кран переміщається у напрямку Y малої сторони електролізера, і тим, що згадана машина обслуговування зв'язана з візком, що переміщається у напрямку X великої сторони електролізера. 28. Спосіб зняття щонайменше однієї кришки електролізера для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що: а) використовують щонайменше один рухомий агрегат за будь-яким з пунктів 22-27; b) розміщують згаданий рухомий агрегат таким чином, щоб згаданий пристрій позиціонування знаходився в певному початковому положенні, при цьому вісь В поступального руху другого шасі (150) є по суті паралельною напрямку X; c) маневрують шарнірним рукавом (130), першим шасі (140) і/або другим шасі (150), а також, необов'язково, системою захоплення (160) таким чином, щоб встановити захоплювальні органи системи захоплення в положення захоплення згаданих кришок; d) приводять в дію захоплювальні органи таким чином, щоб захопити згадані кришки; e) маневрують згаданим шарнірним рукавом, згаданим першим шасі і/або згаданим другим шасі, а також, необов'язково, згаданою системою захоп 5 86287 6 лення таким чином, щоб зняти згадані кришки і транспортувати їх в певну зону складування. 29. Спосіб за пунктом 28, який відрізняється тим, що в ньому використовують пристрій позиціонування з шарнірним рукавом (130), що містить нерухомий елемент (131), жорстко зв'язаний з пересувною опорою (120), і рухомий елемент (132), перший кінець якого закріплений на нерухомому елементі з можливістю повороту навколо осі С, по суті паралельної осям А і В, а другий кінець якого закріплений на першому шасі (140), дозволяючи останньому повертатися навколо згаданої осі А, таким чином, щоб, комбінуючи обертання рухомого елемента навколо осі С і обертання першого шасі навколо осі А, можна було надавати загалом плоскої траєкторії в площині, по суті перпендикулярній напрямку X великої сторони електролізера. 30. Спосіб за пунктом 29, який відрізняється тим, що в ньому надають другому шасі коливального руху невеликої амплітуди в напрямку X, що дозволяє полегшити витягання кришок. 31. Спосіб встановлення щонайменше однієї кришки електролізера для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що: а) використовують щонайменше один рухомий агрегат за будь-яким з пунктів 22-27; b) переміщують згаданий рухомий агрегат до певної зони складування кришок і приводять в дію захоплювальний пристрій так, щоб захопити згадані кришки; c) розміщують згаданий рухомий агрегат із згаданими кришками таким чином, щоб згаданий пристрій позиціонування знаходився в певному початковому положенні, при цьому вісь В поступального руху другого шасі є по суті паралельною напрямку X; d) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб встановити захоплювальні органи системи захоплення в положення установки згаданих кришок; e) приводять в дію захоплювальні органи таким чином, щоб звільнити згадані кришки; f) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб віддалити згаданий пристрій позиціонування від згаданих кришок. 32. Спосіб заміни анодів в електролізері, який відрізняється тим, що він містить етап, на якому щонайменше одну кришку, яка знаходиться поблизу згаданого анода, знімають згідно зі способом знімання кришки за будь-яким з пунктів 28-30, і етап, на якому, після заміни згаданого анода, згадану щонайменше одну кришку встановлюють на місце згідно з способом встановлення кришки за пунктом 31. Даний винахід стосується виробництва алюмінію електролізом в розплаві згідно зі способом Холла-Еру. Зокрема, він стосується операцій обслуговування електролізерів, таких як заміна анодів, а також агрегатів обслуговування, призначених для здійснення таких операцій. У промислових масштабах алюміній виробляють електролізом в розплаві в електролізерах згідно з відомим способом Холла-Еру. У французькій заявці на патент FR 2806742 [відповідній американському патенту US 6409894] розкрито обладнання електролізного заводу, призначене для виробництва алюмінію. Електролізери мають в основному прямокутну біля підлоги форму. Надалі в даному описі буквою X буде означатися напрямок великої сторони електролізера, буквою Υ напрямок малої сторони, а буквою Ζ - вертикальний напрямок. Реакції електролізу, вторинні реакції і високі робочі температури приводять до утворення газоподібних відходів, які містять головним чином діоксид вуглецю і фторвмісні продукти. Викид цих відходів в атмосферу суворо контролюється і регламентується, причому це стосується не тільки викидів в навколишню атмосферу електролізного цеху в зв'язку з охороною умов праці персоналу, працюючого поблизу електролізерів, але і забруднення навколишнього середовища. Законодавством багатьох держав в галузі охорони навколишнього середовища передбачені обмеження по кількостях відходів, що викидаються в атмосферу. У цей час існують рішення, які дозволяють досить надійно виділяти, збирати і обробляти ці відходи. Широко поширеним рішенням є обладнання електролізерів пристроєм уловлювання відходів. Цей пристрій закриває електролізери і містить засоби ізоляції, які включають, зокрема, пристрій укриття і засоби відсмоктування і хімічної обробки відходів. Пристрій укриття містить знімні кришки, які забезпечують доступ всередину електролізера, зокрема, під час заміни витраченого анода новим анодом. Кришки знімає з електролізера і ставить на місце вручну, одну за одною, оператор, що знаходиться на підлозі. У цьому випадку оператор наражається на небезпеку, пов'язаною з близькістю до електролізера і з присутністю вантажнорозвантажувальних інструментів. Зокрема, положення захоплення і встановлення кришок примушує оператора нахилятися над електролізером. Оскільки кришки спираються на обмежені поверхні, неправильне позиціонування кришки може призвести до неправильного надання їй опори на електролізер, до втрати оператором рівноваги і до небезпеки його падіння в електролізну ванну. З іншого боку, знімання кришок знижує ефективність пристрою уловлювання і піддає оператора впливу відходів, які виходять з електролізера, що змушує надівати захисні маски. 7 У зв'язку з цим заявник поставив перед собою задачу пошуку процедури і засобів, які дозволяють усунути ці недоліки. Об'єктом винаходу є пристрій маніпулювання кришками електролізера для виробництва алюмінію електролізом в розплаві, який дозволяє знімати, переміщувати і ставити на місце кришки дистанційно і який може бути повністю або частково автоматизований. Пристрій маніпулювання кришками електролізера згідно з винаходом містить пристрій позиціонування, здатний розкласти операції маніпулювання кришками на певний набір базових рухів, і систему захоплення кришок, здатну надійно захоплювати певний комплект кришок. У переважному варіанті реалізації винаходу пристрій маніпулювання кришками відрізняється тим, що він містить: - пристрій позиціонування, який містить орган вертикального напрямку, такий як телескопічна стріла, рухому опору, таку як каретка, встановлену на органі вертикального напрямку з можливістю переміщення при використанні щонайменше у вертикальному напрямку, шарнірний рукав, встановлений на пересувній опорі, перше шасі, встановлене на шарнірному рукаві з можливістю повороту при використанні навколо по суті горизонтальної першої осі А обертання, причому згаданий шарнірний рукав здатний щонайменше видаляти і наближати перше шасі від/до пересувної опори, двигун для здійснення повороту першого шасі навколо згаданої першої осі А обертання, друге шасі, встановлене на першому шасі з можливістю переміщення вздовж певної першої осі В поступального руху, яка при використанні знаходиться по суті в горизонтальному положенні, і засоби переміщення другого шасі вздовж згаданої першої осі В поступального руху; - систему захоплення кришок, яка закріплена на другому шасі і містить певний комплект захоплювальних органів, призначених для захоплення певного комплекту кришок в певному числі точок кріплення. Згідно з винаходом операції маніпулювання кришками розбивають на певний набір базових рухів, причому кожен з цих базових рухів забезпечується спеціальними конструктивними елементами пристрою. Орган вертикального напрямку і рухома опора служать переважно для вертикальних переміщень системи захоплення, шарнірний рукав служить для переміщень наближення і віддалення системи захоплення, перше шасі і пов'язаний з ним двигун служать для орієнтаційних переміщень системи захоплення відносно вертикалі, а друге шасі і пов'язані з ним засоби переміщення служать для бічних переміщень системи захоплення, тобто для переміщень, паралельних довгим сторонам електролізерів. Ці переміщення можуть бути автоматично регульованими. Надійне захоплення кришок системою захоплення в певному числі точок зменшує неконтрольовані механічні коливання кришок під час маніпулювання ними і втримує, таким чином, кришки в певному фіксованому положенні відносно другого 86287 8 шасі (звичайно це положення є паралельним згаданому шасі). Пристрій за винаходом дозволяє правильно маніпулювати кришками у достатньо завантаженому обладнанням просторі, який оточує електролізери, з точністю, необхідною для механізації і можливої автоматизації операцій маніпулювання. Об'єктом винаходу є також машина обслуговування серії електролізерів для виробництва алюмінію електролізом в розплаві, які містять велику кількість кришок, яка відрізняється тим, що вона містить щонайменше один пристрій маніпулювання кришками згідно з винаходом. Машина обслуговування служить для здійснення різних операцій на електролізерах, зокрема, операцій по заміні анода. Вона обладнана спеціальними інструментами для цих різних операцій, як правило що встановлюються на по суті вертикальних рукавах, переважно - телескопічних рукавах, які переміщують згадані інструменти між їх робочою зоною і неробочим положенням, що знаходиться на безпечній висоті. Переважно, згаданий пристрій маніпулювання кришками закріплений на згаданій машині обслуговування за допомогою органу вертикального напрямку, який може виконувати, таким чином, функцію, ідентичну функції телескопічних рукавів сусідніх інструментів. Об'єктом винаходу є також рухомий агрегат, здатний переміщатися по електролізному цеху, який містить щонайменше один пристрій маніпулювання кришками згідно з винаходом. Переважно, цей рухомий агрегат обладнаний системою керування, що стежить за тим, щоб згаданий пристрій позиціонування знаходився в певному положенні по відношенню до підлягаючої маніпулюванню кришки або великої кількості кришок. Згаданий рухомий агрегат служить для наближення або віддалення пристрою маніпулювання кришкою або певним комплектом кришок до певного положення або від певного положення, яке може бути задане відстанню ΔX у напрямку X великої сторони електролізера, відстанню ΔΥ у напрямку Υ малої сторони електролізера і різницею висоти ΔΖ між характеристичною точкою пристрою маніпулювання, наприклад, конкретною точкою пересувної опори, і характеристичною точкою великої кількості підлягаючих маніпулюванню кришок, наприклад, місцеположенням штанги того анода, для заміни якого необхідно зняти згадану велику кількість кришок. Згадане певне положення являє собою початкове положення пристрою позиціонування перед його приведенням в дію і є контрольною точкою для подальших переміщень, що надаються різним елементам, які входять до складу згаданого пристрою маніпулювання. Згаданий рухомий агрегат може бути самохідним транспортним засобом, здатним переміщатися по електролізному цеху. Він може також являти собою агрегат обслуговування, що містить мостовий кран, звичайно здатний переміщатися вздовж лінії електролізерів, візок, звичайно здатний переміщатися вздовж згаданого мостового крана, і машину обслуговування, яка закріплена на цьому візку і містить згаданий пристрій маніпулювання. Переважно, рухомий агрегат може переміщатися в 9 по суті горизонтальній площині. Необов'язково, він може бути забезпечений приводом, який переміщує згаданий пристрій позиціонування у вертикальному напрямку, причому його дія дозволяє здійснювати попереднє позиціонування по висоті перед приведенням в рух пересувної опори на органі вертикального напрямку. Переважно, він може бути також забезпечений приводом, який дозволяє розміщувати згаданий пристрій позиціонування таким чином, щоб вісь В поступального руху другого шасі була по суті паралельною напрямку X великої сторони електролізера. Об'єктом винаходу є також спосіб зняття щонайменше однієї кришки електролізера для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що: a) використовують щонайменше один рухомий агрегат згідно з винаходом, обладнаний щонайменше одним пристроєм маніпулювання кришками згідно з винаходом; b) розміщують згаданий рухомий агрегат таким чином, щоб згаданий пристрій позиціонування знаходився в певному початковому положенні, причому вісь В поступального руху другого шасі є по суті паралельною напрямку X; c) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб встановити захоплювальні органи системи захоплення в положення захоплення згаданих кришок; d) приводять в дію захоплювальні органи таким чином, щоб захопити згадані кришки; e) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб зняти згадані кришки і транспортувати їх в певну зону складування. Переважно, згаданий шарнірний рукав містить нерухомий елемент, жорстко пов'язаний з пересувною опорою, і рухомий елемент, перший кінець якого закріплений на рухомому елементі з можливістю повороту навколо осі С, по суті паралельної осям А і В, а другий кінець якого закріплений на першому шасі, дозволяючи останньому повертатися навколо згаданої осі А. Таким чином, комбінуючи обертання рухомого елемента навколо осі С і обертання першого шасі навколо осі А, можна надавати захоплювальним органам загалом плоскої траєкторії в площині, по суті перпендикулярній напрямку X, прагнучи видалити згадані кришки за межі верхньої конструкції (анодного пристрою), на якому вони звичайно знаходяться, причому згадана траєкторія на початку переважно є по суті нормальною до поверхні згаданих кришок. Необов'язково, другому шасі надають коливального руху невеликої амплітуди в напрямку X, що дозволяє полегшити витягання кришок. Об'єктом винаходу є також спосіб місцеположення щонайменше однієї кришки електролізера для виробництва алюмінію електролізом в розплаві, який відрізняється тим, що: a) використовують щонайменше один рухомий агрегат згідно з винаходом, обладнаний щонайменше одним пристроєм маніпулювання кришками згідно з винаходом; 86287 10 b) переміщують згаданий рухомий агрегат до певної зони складування кришок і приводять в дію захоплювальний пристрій так, щоб захопити згадані кришки; c) розміщують згаданий рухомий агрегат із згаданими кришками таким чином, щоб згаданий пристрій позиціонування знаходився в певному початковому положенні, причому вісь В поступального руху другого шасі є по суті паралельною напрямку X; c) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб встановити захоплювальні органи системи захоплення в положення установки згаданих кришок; d) приводять в дію захоплювальні органи таким чином, щоб звільнити згадані кришки; e) маневрують шарнірним рукавом, першим шасі і/або другим шасі, а також, необов'язково, системою захоплення таким чином, щоб видалити згаданий пристрій позиціонування від згаданих кришок. Об'єктом винаходу є також спосіб заміни анодів в електролізері, який відрізняється тим, що він містить етап, на якому щонайменше одну кришку, яка знаходиться поблизу згаданого анода, знімають відповідно до описаного вище способу зняття кришки згідно з винаходом, і етап, на якому, після заміни згаданого анода, згадану щонайменше одну кришку встановлюють на місце відповідно до описаного в попередньому абзаці способу місцеположення кришки згідно з винаходом. Далі винахід описаний більш детально за допомогою прикладених креслень. Фіг.1 ілюструє вигляд в розрізі типового електролізного цеху, який призначений для виробництва алюмінію і містить схематично показаний агрегат обслуговування. Фіг.2 ілюструє вигляд в поперечному розрізі типового електролізера, призначеного для виробництва алюмінію. Фіг.3 являє собою вигляд в перспективі частини електролізера за Фіг.2. Фіг.4 ілюструє пристрій маніпулювання кришками згідно з переважним варіантом реалізації винаходу. Фіг.5А і 5В показують з двох різних точок зору частину пристрою маніпулювання кришками за Фіг.4. Фіг.6А і 6В ілюструють роботу пристрою маніпулювання кришками згідно з винаходом у варіанті, що містить шарнірне шасі. Фіг.7 і 8 ілюструють варіанти реалізації переважного варіанту пристрою маніпулювання кришками згідно з винаходом. Фіг.9-15 ілюструють роботу пристрою маніпулювання кришками згідно з винаходом. Електролізні заводи по виробництву алюмінію містять зону виробництва рідкого алюмінію, яка включає в себе один або декілька електролізних цехів (1). Як показано на Фіг.1, кожний електролізний цех (1) містить електролізери (2) і щонайменше один агрегат обслуговування (4). Агрегати обслуговування часто називають «машинами обслуговування електролізу» або «МОЕ» («РТА» 11 або «Pot Tending Assembly» або «РТМ» або «Pot Tending Machine» на англійській мові). Як показано на Фіг.2, кожний електролізер (2) містить електролізну ванну (21), опорну конструкцію (30), яка називається «верхньою конструкцією» («superstructure»), і велику кількість анодів (40, 40'). Електролізна ванна (20) містить стальний кожух (21), внутрішню футерівку (22), як правило утворену блоками з вогнетривких матеріалів, і катодний пристрій, який включає в себе блоки з вуглецевого матеріалу, які називаються «катодними блоками» (23), і металеві з'єднувальні стержні (24), до яких прикріплені електричні провідники (50, 51, 52), що служать для подачі струму електролізу. Кожний анод забезпечений металевою штангою (41, 41'), яка звичайно прикріплена до анода за допомогою анодотримача (42). Аноди (40, 40') знімним чином прикріплені до пересувної металевої рами (25), яка називається «анодною рамою», за допомогою знімного з'єднувача (26, 26'). Анодна рама (25) підтримується верхньою конструкцією (30) і кріпиться до електричних провідників (52), які називаються «анодними стояками» і служать для подачі струму електролізу. Електролізери (2) звичайно розташовані рядами або лініями, причому кожний ряд або лінія звичайно містить більше сотні електролізерів, і електрично сполучені послідовно (в серію) за допомогою з'єднувальних провідників (50, 51, 52). Електролізери (2) розташовані таким чином, щоб вивільнити транспортний проїзд (3) вздовж електролізного цеху (1) і шлях доступу (проходу) (3') між електролізерами. Електролізер (2) обладнаний системою укриття, показаною на Фіг.2 і 3. Система укриття містить ряд знімних кришок (33), які звичайно є металевими, а частіше за все - з алюмінієвого сплаву. Система укриття утримує (ізолює) відходи у внутрішньому просторі (29) електролізера і з'єднана з засобами (не показані) для видалення (відсмоктування) відходів і їх спрямування до центрального вузла обробки. Знімні кришки (33) звичайно вставлені в напрямний паз (35), виконаний вздовж електролізера, і спираються на бортик (31) верхньої конструкції. Кришки (33) звичайно забезпечені ручкою (34), призначеною для маніпулювання ними вручну операторами. Анодні штанги (41, 41') звичайно виступають з системи укриття через отвори (32), виконані для цієї мети в системі укриття. Згідно з найпоширенішою технологією аноди (40, 40') виконують із попередньо випаленого вуглецевого матеріалу. Поступове витрачання анодів під час реакцій електролітичного відновлення алюмінію вимагає операцій обслуговування електролізерів, серед яких, зокрема, фігурує заміна витрачених анодів (40') новими анодами (40). Агрегат обслуговування (4) служить для виконання на електролізерах (2) цих операцій, таких як заміни анода або заповнення живильних бункерів електролізерів подрібненою ванною електроліту і фторидом алюмінію A1F3. Він може також служити для переміщення різних вантажів, таких як елементи електролізної ванни, ковші з рідким металом або аноди. 86287 12 Як показано на Фіг.1, агрегат обслуговування (4) містить мостовий кран (5), який може здійснювати поступальний рух над електролізерами (2), і машину обслуговування (6). Машина обслуговування (6) містить рухомий візок (7) і обслуговуючий модуль (8), обладнаний декількома органами маніпулювання і обслуговування (10), такими як інструменти (ковші, маніпулятори, пробійники і т.д.). Мостовий кран (5) спирається на і переміщається по шляхах котіння (9, 9'), розташованих паралельно один одному і головній осі будівлі (і лінії електролізерів). Таким чином, мостовий кран (5) може переміщатися вздовж електролізного цеху (1). Рухомий візок (7) може переміщатися вздовж мостового крана (5). Машини обслуговування (6), які використовуються для операцій заміни анода, обладнані певним комплектом інструментів (10), а саме: пробійником, черпаковим ковшем, органом захоплення анода (який називається «анодним захватом») і бункером, обладнаним висувним матеріалопроводом. Пробійник служить для розбивання кірки глинозему і затверділої ванни електроліту, що звичайно покриває всі або частину анодів в електролізері; черпаковий ківш служить для звільнення місця під анод шляхом видалення там твердих речовин (таких як шматки кірки і глинозему), які знаходяться після витягання витраченого анода; анодний захват служить для захоплення анодів за анодну штангу і маніпулювання ними, зокрема, для видалення витрачених анодів з електролізера і встановлення нових анодів на їх місце в електролізер; висувний матеріалопровід служить для подачі глинозему і/або подрібненої ванни електроліту в електролізер з метою повторного формування шару покриття після місцеположення нового анода. Пробійник, черпаковий ківш і анодний захват звичайно встановлені на нижньому кінці органу напрямку, такого як телескопічна стріла або рукав. Заміна витраченого анода (40') на новий анод (40) вимагає попереднього знімання певної кількості кришок (33), що знаходяться поблизу цього витраченого анода (40'), їх тимчасового складування і встановлення їх на місце в кінці операцій по заміні анода. Згідно з винаходом кришками маніпулюють за допомогою пристрою маніпулювання (100), який містить пристрій (110) позиціонування і систему (160) захоплення кришок. У переважному варіанті реалізації винаходу пристрій (110) позиціонування містить: - орган (101) вертикального напрямку; - рухому опору (120), таку як каретка, встановлену на органі (101) напрямку з можливістю переміщення при використанні щонайменше у вертикальному напрямку; - шарнірний рукав (130), встановлений на пересувній опорі (120); - перше шасі (140), встановлене на шарнірному рукаві (130) з можливістю повороту при використанні навколо по суті горизонтальної першої осі А обертання; - двигун (141) для повороту першого шасі (140) навколо згаданої першої осі А обертання; 13 - друге шасі (150), встановлене на першому шасі (140) з можливістю переміщення вздовж певної першої осі В поступального руху, яка при використанні є по суті горизонтальною (і звичайно паралельною осі А); - засоби (151, 152, 153, 154, 155) переміщення другого шасі (150) вздовж згаданої першої осі В поступального руху. Орган (101) вертикального напрямку звичайно містить нерухомий елемент (102) і щонайменше один рухомий елемент (103, 103'), і на згаданому або одному із згаданих рухомих елементів (103, 103') встановлена рухома опора (120). Орган (101) вертикального напрямку звичайно являє собою різновид телескопічної стріли. У варіанті реалізації, показаному на Фіг.4-8, орган (101) вертикального напрямку є телескопічною стрілою, що містить нерухому секцію (102), першу висувну секцію (103) і другу висувну секцію (103'), і при цьому рухома опора (120) встановлена на другій висувній секції (103'). Звичайно рухома опора (120) приводиться в дію двигуном (121). Шарнірний рукав (130) служить для переміщення кришок в напрямку, по суті перпендикулярному довгим сторонам електролізерів. Перше шасі (140) служить для коректування нахилу кришок (33) по відношенню до електролізера (2). Друге шасі (150) забезпечує бічне винесення кришок (33), тобто в напрямку, по суті паралельному довгим сторонам електролізерів. Ці переміщення забезпечують точне позиціонування кришок під час маніпулювання ними і здійснюються в першому певному інтервалі допуску, який звичайно складає близько ±0,5см. У прикладах реалізації, показаних на Фіг.4-8, шарнірний рукав (130) містить нерухомий елемент (131), жорстко пов'язаний з пересувною опорою (120), і рухомий елемент (132). Перший кінець рухомого елемента (132) закріплений на нерухомому елементі (131) з можливістю повороту навколо другої осі С, яка при використанні є по суті горизонтальною, за допомогою двигуна (133). Другий кінець рухомого елемента (132) закріплений на першому шасі (140) і дозволяє цьому шасі повертатися навколо згаданої першої осі А обертання. У прикладах на Фіг.4-8 засоби (151-155) переміщення другого шасі (150) містять двигун (151), закріплений на першому шасі (140) і забезпечений шестірнею (152), зубчату рейку (153), яка жорстко пов'язана з другим шасі (150) і з якою зачіпляється шестірня (152), напрямні (154) і опорні підшипники (155), встановлені ковзними по напрямних (154). Система (160) захоплення кришок містить певний комплект захоплювальних органів (161), призначених для захоплення певного комплекту кришок (33) в певному числі точок. Система (160) захоплення кришок кріпиться, безпосередньо або опосередковано, до другого шасі (150). Операції обслуговування електролізерів, зокрема, операції по заміні анодів, звичайно вимагають знімання декількох кришок за раз. Певний комплект кришок (33) звичайно містить щонайменше три кришки (33). На Фіг.4-8 показаний випадок, коли пристрій дозволяє маніпулювати одночасно чотирма кришками. 86287 14 Для істотного зменшення механічних коливань кришок під час маніпулювання ними і забезпечення таким чином високої точності їх позиціонування число точок кріплення переважно більше або дорівнює трьом на кришку, і при цьому згадані точки переважно розташовані таким чином, щоб утворити площину. Таким чином, кришки (33) залишаються по суті нерухомими (і звичайно паралельними) по відношенню до другого шасі (150) під час маніпулювання ними. Захоплювальні органи (161) можуть бути вибрані серед відомих захоплювальних засобів, таких як крюки або електромагніти. Разом з тим, щоб мати можливість захоплення кришок, що не мають власних захоплювальних засобів, взаємодіючих із захоплювальними органами системи (160) захоплення, захоплювальні органи (161) переважно являють собою присоски, що приводяться в дію пневматичною системою. У варіанті реалізації, показаному на Фіг.4-8, число присосків і, отже, точок кріплення, дорівнює чотирьом на кришку, що підвищує надійність пристрою. Переважним чином, система (160) захоплення додатково містить засоби продування, призначені для очищення продуванням згаданих точок кріплення на кришці або кришках перед приведенням в дію згаданих присосків. Система (160) захоплення переважно містить шарнірне шасі (162), що містить нерухому раму (169), закріплену на другому шасі (150), щонайменше одну шарнірну раму (163, 163'), закріплену на нерухомій рамі (169) за допомогою щонайменше одного шарніра (164, 164') з можливістю повороту навколо осі (D, D'), яка при використанні є по суті вертикальною, і, для кожної шарнірної рами (163, 163'), привід (165, 165'), призначений для здійснення повороту згаданої або кожної шарнірної рами (163, 163') навколо згаданої осі. Згаданий привід (165, 165') звичайно являє собою силовий циліндр. Цей варіант винаходу є особливо вигідним в тому випадку, коли електролізери мають анодні стояки (52), які знаходяться близько один до одного. Дійсно, у випадку таких електролізерів ширина, що перекривається певним комплектом кришок, як правило перевищує відстань, яка розділяє два суміжних анодних стояки. У цьому випадку шарнірне шасі (162) дозволяє відкидати одну з кришок комплекту, розміщуючи її звичайно перпендикулярно до площини інших кришок, як показано на Фіг.6А і 6В, що дозволяє зменшити загальну ширину комплекту кришок і пройти між анодними стояками (52). Шарнірне шасі (162) переважно містить дві шарнірні рами (163, 163'), розташовані з утворенням «тріади». Зокрема, шарнірне шасі (162) переважно містить першу шарнірну раму (163), закріплену на першому кінці нерухомої рами (169) за допомогою щонайменше одного першого шарніра (164), перший привід (165), призначений для здійснення повороту першої шарнірної рами (163) навколо першої осі D, другу шарнірну раму (163'), закріплену на другому кінці нерухомої рами (169) за допомогою щонайменше одного другого шарніра (164'), і другий привід (165'), призначений для здійснення повороту другої шарнірної рами (163') 15 навколо другої осі D' за допомогою другого приводу (165'). Цей варіант винаходу дозволяє розміщувати ту або іншу з крайніх кришок перпендикулярно до площини інших кришок. Він є особливо вигідним у випадку, коли комплект підлягаючих маніпулюванню кришок містить кришку або кришки, які знаходяться під анодними стояками по той або інший бік пристрою маніпулювання (100). Цей варіант винаходу показаний на Фіг.6А і 6В. Для полегшення звільнення простору, достатнього для забезпечення можливості повороту згаданої рами (163, 163'), шарнірне шасі (162) переважно встановлене на другому шасі (150) з можливістю переміщення вздовж другої певної осі В' поступального руху, яка при використанні є по суті горизонтальною і яка є звичайно паралельною згаданій першій певній осі В поступального руху, і пристрій (110) позиціонування кришок містить засоби (166, 167, 168), такі як напрямний привід, для переміщення шарнірного шасі (162) вздовж другої осі В' поступального руху, яка є звичайно паралельною першій осі В поступального руху. У варіантах реалізації, показаних на Фіг.4-8, згадані засоби (166, 167, 168) переміщення шарнірного шасі (162) містять напрямні (166), встановлені на другому шасі (150), опорні підшипники (167), жорстко пов'язані з шарнірним шасі (162) і встановлені на напрямних з можливістю ковзання вздовж цих напрямних, і лінійний привід (168), такий як безштоковий силовий циліндр. Цих засобів досить для забезпечення переміщення шарнірного шасі (162) між двома крайніми положеннями. На Фіг.9 показаний приклад роботи цього варіанту винаходу у варіанті реалізації, показаному на Фіг.4-8, де пристрій маніпулювання (100) дозволяє маніпулювати чотирма кришками (33а, 33b, 33c, 33d) одночасно. Електролізер показаний частково в проекції зверху. У цьому прикладі три кришки (33а, 33b, 33с) знаходяться між двома послідовними анодними стояками (52, 52'), а четверта кришка (33d) знаходиться під одним з цих двох анодних стояків (52'). Підлягаючий заміні анод, штанга (41') якого показана в перерізі, знаходиться за третьою кришкою (33с), якщо рахувати зліва. Шарнірне шасі (162), захоплювальні органи (161а, 161b, 161с, 161d) і перше шасі (140) показані схематично. Як показано на Фіг.9 (А), пристрій маніпулювання (100) спочатку розміщують таким чином, щоб перше шасі (140) виявилося навпроти підлягаючого заміні анода, а захоплювальні органи (161а, 161b, 161с, 161d) - навпроти кожної з відповідних кришок (звичайно поруч з вертикальною віссю кожної кришки). У цьому випадку шарнірне шасі (162) виявляється частково під правим анодним стояком (52'). Захоплювальні органи (161a, 161b, 161c, 161d) притискують до кришок і приводять в дію для їх захоплення. Після цього кришки зсувають з їх місця і злегка піднімають. Першу кришку (33а) відкидають, звичайно шляхом повороту на 90° лівої шарнірної рами (163) відносно площини інших кришок (як показано на Фіг.9 (В)). Як показано на Фіг.9 (С), шарнірне шасі (162) зміщають ліворуч, що дозволяє пристрою маніпулювання зняти комплект кришок без перешкод з боку анодних стояків (52, 52'). 86287 16 У переважному варіанті винаходу пристрій (100) маніпулювання кришками додатково містить засіб (180, 180') очищення, який встановлений на другому шарнірному рукаві (170). Засіб (180, 180') очищення служить, зокрема, для видалення пилу і уламків кірки і анода, які залишилися після операцій по заміні анода, зокрема, в напрямних пазах (35), перед встановленням кришок на місце. Засіб (180, 180') очищення звичайно вибирають серед щіток, скребачок і/або засобів продування. На Фіг.7 і 8 показані варіанти реалізації цього варіанту, в яких другий шарнірний рукав (170) встановлений на першому шасі (140). У цих прикладах шарнірний рукав (170) містить перший (171) і другий (172) рухомі елементи, з'єднані між собою шарнірним зчленуванням, при цьому перший рухомий елемент (171) закріплений на першому шасі (140) з можливістю повороту навколо першої осі шарнірного зчленування, яка при використанні звичайно є горизонтальною, за допомогою першого двигуна (173), шарнірний рукав (170) містить другий двигун (174) для здійснення повороту другого рухомого елемента (172) навколо другої осі шарнірного зчленування, що проходить через шарнірне зчленування, а засіб очищення (180, 180') закріплений на другому рухомому елементі (172). У прикладі на Фіг.7 засобом (180) очищення є щітка, яка закріплена на другому рухомому елементі (172) за допомогою важеля (176) з можливістю повороту навколо третьої осі шарнірного зчленування за допомогою третього двигуна (175), необов'язково з'єднаного через редуктор (177). Щітка (180) звичайно є обертовою щіткою, що приводиться в дію двигуном (181). У прикладі на Фіг.8 засобом (180') очищення є скребачка, яка приводиться в дію третім двигуном (175'). Другий шарнірний рукав (170) може бути необов'язково встановлений на окремому пристрої маніпулювання (100). Пристрій (100) маніпулювання кришками згідно з винаходом може містити засоби стопоріння кришок на системі (160) захоплення як додатковий аварійний засіб кріплення у разі несправності захоплювальних органів. Переважно, для забезпечення надійності стопоріння засоби стопоріння є механічними засобами. Наприклад, засоби стопоріння можуть містити крюк, встановлений на обертовому силовому циліндрі і здатний заходити в ручки (34) кришки (33). Для забезпечення автоматизації маніпулювання кришками (33) пристрій маніпулювання (100) згідно з винаходом може бути обладнаний комп'ютерною системою керування. Ця система керування може здійснювати заздалегідь запрограмовані операції і/або виконувати програми автоматичного керування. Для цього пристрій (100) маніпулювання кришками переважно містить кодуючий пристрій і систему виявлення, здатну виявляти присутність кришок, їх орієнтацію і їх положення. Цей варіант винаходу дозволяє ефективно знаходити кришки, які, хоч і повинні в принципі знаходитися в певних місцях, можуть бути зсунені відносно свого теоретичного положення, правда, як правило, в межах певного інтервалу допусків. Сигнали, пов'язані з присутністю згаданих кришок, їх орієнтацією і їх положенням, передаються на згаданий кодую 17 чий пристрій, який перетворює їх в цифрові дані для системи керування. Система виявлення звичайно містить щонайменше одну систему телеметрії, таку як лазерний далекомір. Наприклад, система виявлення може містити комплект з двох далекомірів, виконаних з можливістю виявлення присутності певної кришки шляхом відображення і вимірювання орієнтації і положення цієї кришки. Система виявлення може переважно служити для виявлення поверхневих малюнків і/або певних елементів на кришках з тим, щоб уникнути або спричинити приміщення захоплювальних елементів (161) на ці елементи або малюнки. Наприклад, коли кришки забезпечені однією або декількома ручками і ребрами жорсткості, систему виявлення можна використовувати для визначення положення ручок, які виконані звичайно виступаючими відносно кришок, і, отже, більш легко відмітні від кришок, і для використання положення ручок як орієнтири для позиціонування захоплювальних органів (161) відносно кришок. Для забезпечення можливості контролю за відстанню між щонайменше однією певною точкою на пристрої маніпулювання (100) і точкою на електролізері пристрій маніпулювання (100) згідно з винаходом переважно містить систему телеметрії, виконану з можливістю вимірювання цієї відстані. Певна контрольна точка на електролізері звичайно знаходиться на анодній рамі, анодних штангах або кришках. Система телеметрії переважно вибрана з далекомірів (звичайно лазерних далекомірів), аналізаторів просторової конфігурації і камер, забезпечених аналізаторами зображення. Цей варіант винаходу дозволяє, наприклад, перевіряти відстань між захоплювальними органами (161) і певними точками на електролізері і, отже, відстань між захопленими кришками і згаданими точками з тим, щоб точно позиціонувати кришки по відношенню до електролізера. Пристрій (100) маніпулювання кришками згідно з винаходом призначений для встановлення на транспортному пристрої, такому як агрегат (4) обслуговування, машина обслуговування (6) або самохідний транспортний засіб, здатний пересуватися по транспортному проїзду (3) і по шляху доступу (3'). Пристрій (100) маніпулювання кришками може, таким чином, обслуговувати декілька різних електролізерів. Транспортний пристрій призначений для виконання операцій обслуговування електролізерів (2) для виробництва алюмінію. Для спрощення роботи операторів пристрій (100) маніпулювання кришками згідно з винаходом переважно встановлюють на агрегаті (4) обслуговування або машині обслуговування (6), призначеній для виконання операцій по заміні анода, необов'язково, на тій же самій машині обслуговування (6), яка містить згаданий певний комплект інструментів (10). Транспортний пристрій служить для розміщення пристрою (110) позиціонування поблизу кришки або комплекту кришок (33), якою(им) належить маніпулювати. Це наближення, відносно грубе, здійснюють у другому визначеному інтервалі допуску, який звичайно складає близько ±1см. 86287 18 Заміну витраченого анода (40') на новий анод (40) звичайно здійснюють за допомогою способу, при якому: - розташовують машину обслуговування (6), що містить згаданий певний комплект інструментів (10), поруч з певним витраченим анодом (40'); - знімають певну кількість кришок (3), що знаходяться поблизу витраченого анода (40'), і складують їх недалеко від їх початкового місця, як правило, розміщуючи на сусідніх кришках; - захоплюють металеву штангу (41') витраченого анода (40') за допомогою анодного захвата; - ослаблюють з'єднувач (26') витраченого анода і знімають його за допомогою інструмента маніпулювання з'єднувачами, який може бути встановлений на машині обслуговування, що використовується для заміни анодів; - витягують витрачений анод (40') з електролізера за допомогою анодного захвата і вміщують його в певне місце; - захоплюють замінюючий анод (40) за допомогою інструмента маніпулювання, як правило, того ж самого анодного захвата, який використовували для маніпулювання витраченим анодом, і встановлюють на те місце, яке раніше займав витрачений анод; - кріплять замінюючий анод (40) на анодній рамі (25) за допомогою з'єднувача (26); - повертають кришки (33) на їх початкове місце. Таке маніпулювання кришками може бути здійснене за допомогою пристрою (100) маніпулювання кришками згідно з винаходом. Воно звичайно містить наступні операції: - вміщують транспортний пристрій, обладнаний пристроєм маніпулювання (100), поруч з підлягаючим заміні витраченим анодом (40'), як правило, відносно його металевої штанги (41'). Цей маневр, який може здійснюватися автоматичним чином, якщо пристрій обладнаний комп'ютерною системою керування, призначений для розміщення пристрою (110) позиціонування в певне положення по відношенню до підлягаючих зняттю кришок з певною точністю близько ±2см, переважно ±1см. Це положення являє собою контрольну точку для подальших переміщень елементів пристрою маніпулювання (100). - Приводять в дію орган (101) вертикального напрямку і/або рухому опору (120) таким чином, щоб розмістити рухому опору (120) на певній висоті відносно рівня шляху доступу (3'). - Приводять в дію шарнірний рукав (130), перше шасі (140), друге шасі (150) і, необов'язково, систему (160) захоплення таким чином, щоб привести захоплювальні органи (161) системи (160) захоплення в положення захоплення згаданих кришок. - Приводять в дію захоплювальні органи (161) для захоплення певних кришок (які є в кількості чотирьох на Фіг.4-8). - Маневрують шарнірним рукавом (130), першим шасі (140), другим шасі (150) і, необов'язково, системою (160) захоплення таким чином, щоб зняти згадані кришки і транспортувати їх до певної зони складування. Ця певна зона складування 19 переважно знаходиться на віддаленні від робочої зони, необхідної для операцій по заміні анода. Для забезпечення точності, необхідної для місцеположення кришок після заміни анода, кришки переважно залишаються закріпленими на захоплювальних органах (161) під час всіх операцій по заміні анода і аж до їх місцеположення. - Після операцій по заміні анода маневрують шарнірним рукавом (130), першим шасі (140), другим шасі (150) і, необов'язково, системою (160) захоплення таким чином, щоб повернути згадані кришки на їх початкове місце. Перед встановленням кришок на місце звичайно є переважним видалити пил і відламки кірки і анода, що залишилися після операцій по заміні анода. Це очищення може бути зроблене вручну або за допомогою згаданого засобу (180, 180') очищення. Використання засобу (180, 180') очищення згідно з винаходом дозволяє ще більше автоматизувати маніпулювання кришками. Під час захоплення кришок переважно стежать за тим, щоб захоплювальні органи (161) дійсно захоплювали кришки. Цей контроль може здійснюватися автоматично за допомогою додаткових засобів вимірювання і/або системи активації захоплювальних органів. Наприклад, захоплення кришок можна перевіряти за допомогою системи виявлення, здатній виявити присутність кришок, і/або, в тому варіанті винаходу, в якому ці органи містять присоски, за допомогою вимірювання тиску в пневматичній системі. Як міра безпеки можна блокувати переміщення кришок, якщо кришка не захоплена мінімальним числом захоплювальних органів (161); наприклад, якщо система (160) захоплення містить чотири захоплювальних органи на кришку, переміщення кришки можна блокувати, якщо кришка не захоплена щонайменше трьома з цих органів. У цьому випадку потрібне втручання оператора для виявлення причини такого неналежного функціонування. Маневри по переміщенню кришок під час їх зняття, їх складування і їх місцеположення потрібно здійснювати таким чином, щоб не торкатися до анодних стояків і до кришок, що залишаються на місці. Як правило, необхідність в рухах другого шасі (150) виникає тоді, коли щонайменше одна з кришок комплекту знаходиться між анодним стояком (52) і електролізною ванною (20). У цьому випадку маневри звичайно включають в себе позиціонування згаданого комплекту кришок на певній відстані відносно площини кришок, що залишаються на електролізері, щоб втримувати їх на відстані, достатній для того, щоб не зачепити ручки кришок, які залишаються на електролізері, і переміщення комплекту кришок в бічному напрямку. Переважним чином, під час зняття кришок можна надавати кришкам коливального руху, що є по суті горизонтальним і має невелику амплітуду (звичайно менше приблизно 10мм, а переважно від 1 до 10мм) за допомогою відповідного руху другого шасі (150). Метою цього руху є, зокрема, полегшення витягання кришок в тому випадку, коли вони виявляються затиснутими сусідніми кришками, або їх місцеположення в тому випадку, 86287 20 коли простір між кришками, що залишаються на електролізері є недостатнім. У варіанті системи (160) захоплення, яка містить засоби (166, 167, 168) переміщення шарнірного шасі (162), маневр системи (160) захоплення може включати в себе, крім руху рами або рам (163), бічні переміщення шарнірного шасі (162) під дією засобів (166, 167, 168) переміщення. Як правило, ці бічні переміщення бувають необхідні тоді, коли ширина, яка перекривається комплектом кришок, зафіксованих на системі (160) захоплення, перевищує ту відстань, яка розділяє два сусідніх анодних стояки. У цьому випадку раму або одну з рам (163) встановлюють перпендикулярно до площини інших кришок за допомогою приводу (165, 165'), що зменшує загальну ширину комплекту кришок, і переміщують шарнірне шасі (162) в напрямку згаданої рами за допомогою засобів (166, 167, 168) переміщення таким чином, щоб встановити комплект кришок в положення, що забезпечує їх проходження між двома сусідніми анодними стояками, не зачіпаючи їх. У варіанті пристрою маніпулювання (100), що містить систему виявлення, операції маніпулювання кришками переважно включають в себе вимірювання положення і орієнтації кришок, призначеного для захоплення цим пристроєм. Такі вимірювання дозволяють з більшою точністю здійснювати маневри по установці системи (160) захоплення в положення захоплення. Ці вимірювання дозволяють також встановлювати кришки точно на місце після операцій по заміні анода. Крім того, ці вимірювання дозволяють повністю автоматизувати маневри. Як показано на Фіг.10-12, маніпулювання кришками можна здійснювати згідно зі способом, при якому: - вміщують пристрій маніпулювання (100) в початкове положення (Фіг.10); - опускають рухому опору (120) (Фіг.11); - приводять захоплювальні органи (161) в положення захоплення кришок (33), переміщуючи систему (160) захоплення за допомогою шарнірного рукава (130), першого шасі (140) і другого шасі (150) (Фіг.12); - вивільняють кришки (33) з місця і підводять до певного положення (Фіг.13); - необов'язково, переміщують кришки (33) убік і, необов'язково, відкидають одну або декілька кришок, як показано на Фіг.9, щоб забезпечити повне зняття комплекту кришок, захоплених пристроєм маніпулювання (100); - переміщують кришки (33) в певне положення (Фіг.14); - видаляють кришки (33) із зони обслуговування електродізера і переміщують пристрій маніпулювання (100) в певне положення очікування, яке переважно є досить віддаленим від електролізера для того, щоб не заважати згаданим операціям власне заміни анода (Фіг.15). Місцеположення кришок (33) можна проводити аналогічним способом, здійснюючи його операції в зворотному порядку. 21 86287 22 23 86287 24 25 86287 26 27 86287 28 29 Комп’ютерна верстка А. Рябко 86287 Підписне 30 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for handling hoods of electrolytic cell for production of aluminium by electrolysis
Автори англійськоюVan Acker Alain, Demeulenaere Ludovic
Назва патенту російськоюУстройство манипулированния крышками электролизера для производства алюминия электролизом
Автори російськоюВан Акер Ален, Демеленер Людовик
МПК / Мітки
Мітки: виробництва, алюмінію, маніпулювання, кришками, пристрій, електролізом, електролізера
Код посилання
<a href="https://ua.patents.su/15-86287-pristrijj-manipulyuvannya-krishkami-elektrolizera-dlya-virobnictva-alyuminiyu-elektrolizom.html" target="_blank" rel="follow" title="База патентів України">Пристрій маніпулювання кришками електролізера для виробництва алюмінію електролізом</a>
Спосіб виготовлення випалених анодів для виробництва алюмінію електролізом
Номер патенту: 4750
Опубліковано: 28.12.1994
Автор: Клод Ванворен
Мітки: випалених, електролізом, спосіб, алюмінію, анодів, виготовлення, виробництва
Формула / Реферат:
Способ изготовления обожженных анодов для производства алюминия элетролизом, включающий смешение углеродистого наполнителя и коксующегося пека при нагревании, формование анода уплотнением, определение плотности сырого анода путем измерения его веса и усадки по высоте и обжиг изделия, отличающийся тем, что, с целью повышения качества анодов, после определения плотности сырого анода определяют максимальную плотность сухого анода по...
Катодний пристрій електролізера для одержання алюмінію
Номер патенту: 19352
Опубліковано: 25.12.1997
Автори: Нікітенко Володимир Кузьмич, Солонін Генадій Володимирович, Артеменко Станіслав Арсеньович
МПК: C25C 3/08
Мітки: катодний, пристрій, одержання, алюмінію, електролізера
Формула / Реферат:
Катодное устройство электролизера для получения алюминия, включающее кожух, угольные боковые и подовые блоки, огнеупорную футеровку, отличающееся тем, что огнеупорная футеровка выполнена из смеси железной окалины и 10-20% алюмосиликатного или силикатного материала.
Спосіб монтажу катодної секції електролізера для одержання алюмінію
Номер патенту: 4728
Опубліковано: 28.12.1994
Автори: Фрідман Михайло Олександрович, Бастрига Іван Михайлович, Полніцький Євген Олександрович, Кнігєль Владімір Августовіч, Лакомський Віктор Йосипович, Таран Олександр Якович, Ющенко Костянтин Андрійович
МПК: C25C 3/08
Мітки: електролізера, алюмінію, спосіб, катодної, монтажу, секції, одержання
Формула / Реферат:
Способ монтажа катодной секции электролизера для получения алюминия, включающий выполнение углублений в пазу блока, нанесение контактного слоя на поверхность паза блока, его расплавление и механическую обработку, отличающийся тем, что контактный слой наносят в углубления и на поверхность паза блока вокруг углублений на площади, ограниченной радиусом 7-75мм от оси углубления, и выдерживают его в расплавленном состоянии в течение 5-30...
Спосіб монтажу подової секції електролізера для одержання алюмінію
Номер патенту: 6532
Опубліковано: 29.12.1994
Автори: Лебедєв Володимир Костянтинович, Патон Борис Євгенович, Полніцький Євген Олександрович, Лакомський Віктор Йосипович, Таран Олександр Якович
МПК: C25C 3/08
Мітки: секції, одержання, монтажу, електролізера, подової, спосіб, алюмінію
Формула / Реферат:
(57) 1. Способ монтажа подовой секции электролизера для получения алюминия, включающий нанесение контактного слоя на поверхность паза углеродистого блока, установку металлического токоподводящего стержня в пазу и заливку его чугуном, отличающийся тем, что предварительно на поверхности паза блока выполняют углубления, всю поверхность паза нагревают до 900-1500°С, в качестве контактного слоя используют материал с электропроводностью больше,...
Спосіб керування тепловим режимом електролізера для одержання алюмінію
Номер патенту: 19796
Опубліковано: 25.12.1997
Автори: Локшин Робєрт Гіршевіч, Казаков Дмітрій Романовіч, Шупацкій Гєннадій Матвєєвіч, Фітерман Михаіл Яковлєвіч, Самоловов Сєргєй Алєксандровіч, Нікулін Віктор Ніколаєвіч, Майєр Алєксандр Давідовіч, Бєрх Вєніамін Ісааковіч
МПК: C25C 3/20
Мітки: алюмінію, одержання, режимом, спосіб, електролізера, керування, тепловим
Формула / Реферат:
Способ управления тепловым режимом электролизера для получения алюминия, включающий измерение напряжения на электролизере и тока через него, определение сопротивления электролизера и его стабилизацию вертикальными перемещениями анода пропорционально отклонению сопротивления от заданной области значений сопротивления, отличающийся тем, что после каждого перемещения анода...
Попередній патент: N-r-аміди 1-гідрокси-3-оксо-5,6-дигідро-3н-піроло-[3,2,1-ij]-хінолін-2-карбонової кислоти, які виявляють діуретичну активність
Наступний патент: Пристрій та спосіб дегазації розплавленого металу
Випадковий патент: Джерело безперебійного електроживлення з імпульсним стабілізатором напруги